Асинхронный двигатель с короткозамкнутым ротором (АД С КЗР)
Устройства, преобразующие электрическую энергию (вход) в механическую (выход), называются электрическими двигателями .
Механическая энергия необходима для работы производственных машин и механизмов.
АД состоит из статора (неподвижной части) и ротора (подвижной части).
Обмотка статора двигателя рассчитана на дельта-операцию и подключается к звезде в течение периода запуска. Когда машина достигает скорости, соединения меняются на дельта. Схема схемы запуска звезды-треугольника показана ниже. Шесть проводов обмоток статора подключены к переключателю переключения, как показано. В момент запуска переключатель переключения переключается в положение «Пуск», которое соединяет обмотки статора с звездой. Это уменьшает пусковой ток. Объясните в деталях начало двигателей скольжения?
Двигатели с проскальзывающим кольцом всегда запускаются пуском сопротивления ротора. В этом методе переменный звездообразный реостат соединен в цепи ротора через кольца скольжения, и полное напряжение подается на обмотку статора, как показано на рис. Это уменьшает пусковой ток и в то же время увеличивается вращающий момент.
В статор входят: корпус; магнитопровод (сердечник), состоящий из тонких стальных пластин; три обмотки (катушки), смещенные между собой на 120°, которые укладываются в пазы магнитопровода.
В ротор входят: вал, магнитопровод, короткозамкнутая (в виде беличьей клетки) обмотка.
Условное обозначение
К ротору подсоединяется производственный механизм, который является нагрузкой на двигатель.
Когда двигатель поднимает скорость, ручка реостата постепенно перемещается по часовой стрелке и вырезает внешнее сопротивление в каждой фазе контура ротора. В чем преимущества асинхронных двигателей сальто-кольца над двигателями с короткозамкнутым ротором?
Высокий пусковой момент при малом пусковом токе. Плавное ускорение при тяжелых нагрузках. Хорошие рабочие характеристики после внешних сопротивлений ротора вырезаются. Регулируемая скорость. Есть ли недостаток двигателей с проскальзывающим кольцом? Начальные и эксплуатационные расходы выше, чем у двигателей с короткозамкнутым ротором. Регулирование скорости плохое при работе с сопротивлением в цепи ротора.
Достоинства двигателя: простой, дешевый, надежный.
Недостатки: плохие пусковые качества, т. е. малый пусковой момент, большой пусковой ток, а также потребление из сети реактивного тока.
ПРИНЦИП РАБОТЫ
U 1 → I 1 → Ф 1 (вращающееся магнитное поле) → Е 2 (Е 1 ) → I 2
Каковы различные рейтинги, используемые для индукционного двигателя? Паспортная табличка 3-фазного асинхронного двигателя содержит следующую информацию. Лошадиная сила Линейное напряжение Линейный ток Скорость Частота Повышение температуры. Что вы подразумеваете под рейтингом лошадиных сил и показывает ли он синхронную скорость двигателя?
Рейтинг мощности - это механическая мощность двигателя, когда он работает при номинальном линейном напряжении, номинальной частоте и номинальной скорости. В этих условиях ток линии соответствует указанному на паспортной табличке, и повышение температуры не превышает указанного.
В результате взаимодействия I 2 с Ф, создается момент М [Нм]
М = К I 2 Ф cosψ 2 ,
где ψ 2 - фазовый сдвиг между Е 2 иI 2 , под действием которого ротор приходит во вращение.
В АД имеет место АСИНХРОННОСТЬ (неодинаковость) вращения магнитного поля n 1 и ротора n 2 . Благодаря этой асинхронности движения возникают электрические процессы в роторе (Е 2 иI 2). Величина асинхронности оценивается скольжением S, в относительных единицах или процентах:
Скорость, указанная на паспортной табличке, - это фактическая скорость двигателя при номинальной полной нагрузке; это не синхронная скорость. Для обеспечения высокого пускового момента при малом пусковом токе используется конструкция с двумя клетками.
Как следует из названия, ротор этого двигателя имеет две обмотки с короткозамкнутым ротором, расположенные одна над другой. Какова функция внешней обмотки конструкции с двойной клеткой? Внешняя обмотка состоит из стержней меньшего поперечного сечения, короткозамкнутых концевыми кольцами. Поэтому сопротивление этой обмотки является высоким. Поскольку внешняя обмотка имеет относительно открытые щели и более плохую дорожку потока вокруг ее стержней, поэтому она имеет низкую индуктивность. Таким образом, сопротивление внешней обмотки с короткозамкнутым ротором является высоким и его индуктивность низка.
![]() ,
[%],
,
[%],
n 1 - частота вращения магнитного поля.
P п - число пар магнитных полюсов поля: 1, 2, 3 … и т. д.;
f - частота тока.
Если f ном = 50 Гц, то = 3000, 1500,1000 об/мин и т. д. в зависимости от числа пар полюсов двигателя.
Из
(1) имеем
![]() .
.
Какова функция внутренней обмотки конструкции с двойной клеткой? Внутренняя обмотка состоит из стержней большего сечения, короткозамкнутых концевыми кольцами. Поэтому сопротивление этой обмотки низкое. Поскольку стержни внутренней обмотки тщательно зарыты в железо, она имеет высокую индуктивность. Таким образом, сопротивление внутренней обмотки короткозамкнутого вала является низким и его индуктивность является высокой.
Что вы подразумеваете под синхронной скоростью 3-фазного асинхронного двигателя? Скорость, с которой поток, создаваемый трехфазной обмоткой статора асинхронного двигателя, вращается, называется синхронной скоростью двигателя. Почему поле, создающее обмотку 3-фазного асинхронного двигателя, сделало стационарным?
Работа двигателя начинается с n 2 = 0 (пуск), тогда
(максимальное скольжение).
Теоретически максимальная частота вращения ротора при отсутствии нагрузки n 2 = n 1 , тогда
Диапазон изменений S составил от 1 (минимальная скорость ротора) до 0 (максимальная скорость ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД - основная характеристика АД, показывающая как изменяется частота вращения ротора под действием нагрузки. Эту характеристику можно получить эксплуатационным или расчетным путем по формулам:
Трехфазный асинхронный двигатель имеет две обмотки - обмотку статора, поддерживаемую неподвижной частью машины, и обмотку ротора, расположенную на роторе. Что касается основной работы двигателя, то нет никакой разницы, какая обмотка находится на статоре. Машина будет работать одинаково хорошо с полевой обмоткой как неподвижным, так и вращающимся элементом. Создание стационарного элемента намотки поля исключает использование прокладочных колец и щетки и, следовательно, приведет к очень безотказной конструкции.
Почему ротор 3-фазного асинхронного двигателя вращается в том же направлении, что и вращающееся поле? Когда трехфазная обмотка статора подается от трехфазного питания, устанавливается вращающееся магнитное поле, которое обрезает проводники ротора. Поскольку цепь ротора закрыта, токи в каналах ротора начинают течь. Теперь проводники ротора переносят токи и находятся в магнитном поле. Поэтому механическая сила воздействует на ротор, стремясь перемещать его в том же направлении, что и поле статора.
 (1)
(1)
Задаваясь в формулах (1) и (2) S , можно найти n.
Задаваясь нагрузкой М можно найти скольжение, а, следовательно, и n 2 .
Эта механическая характеристика имеет вид:
|
Тот факт, что ротор призван следовать за полем статора, можно объяснить законом Ленца. Согласно закону Ленца, направление токов ротора будет таким, чтобы противостоять вызывающей их причине. Теперь причиной, создающей токи ротора, является относительная скорость между вращающимся полем и неподвижным ротором. Следовательно, чтобы уменьшить эту относительную скорость, ротор начинает работать в том же направлении, что и поле статора, и пытается его поймать. Почему 3-фазный асинхронный двигатель не работает синхронно? Ротор следует за полем статора. На практике ротор никогда не сможет достичь скорости поля статора. Если бы это было так, не было бы никакого относительного перемещения между полем статора и проводниками ротора и, следовательно, без крутящего момента для привода двигателя. Следовательно, трехфазный асинхронный двигатель никогда не может работать на синхронной скорости. |
|
На характеристике можно выделить 4 основных точки и соответственно 3 участка. Рассмотрим эти точки:
1 - холостой ход (двигатель вращается без нагрузки).
Координаты этой точки (n 2 = n 1 , М=0);
2 - номинальный режим - наступает при нагрузке равной предельно допустимой в условиях длительной работы.
Почему воздушный зазор между ротором и статором 3-фазного асинхронного двигателя поддерживается как можно короче? Воздушный зазор между ротором и статором трехфазного асинхронного двигателя выполнен настолько малым, насколько это возможно. Взаимный поток может создаваться с минимальным возбуждающим током. реактивное сопротивление утечки как можно меньше.
Как ток намагничивания остается небольшим в трехфазном асинхронном двигателе? Ток намагничивания, создаваемый трехфазным асинхронным двигателем, очень велик из-за наличия воздушного зазора между статором и ротором. Какова важность проскальзывания в трехфазном асинхронном двигателе?
Координаты этой точки (n 2 = n ном, М=М ном), указываются в паспорте;
3 - критическая нагрузка, при которой двигатель развивает максимальный момент.
Координаты этой точки (S кр или n кр; М=М мах =М кр) .
При нагрузке большей критической двигатель с ней не справляется, что приводит к остановке;
4 - пусковая точка, с этой точки начинается запуск двигателя.
Скорость, с которой поток разрезает проводники ротора, прямо пропорционален разнице между скоростью вращающегося поля и скоростью вращения ротора. Следовательно, двигательных действий не было. Это как раз принцип работы трехфазного асинхронного двигателя. В чем разница между ротором белой клетки и раневым ротором?
По сути, между белой клеткой и раневыми роторами мало различий. Цель последнего состоит в том, чтобы вывести концы полифазной роторной обмотки на скользкие кольца, чтобы дополнительное внешнее сопротивление могло быть соединено последовательно для улучшения стартового момента.
Координаты этой точки (n 2 = 0, М = М п)
Все координаты можно найти по паспортным данным двигателя.
Участки 1-3 - устойчивая работа, при нагрузке двигателя от 0 до М кр двигатель обладает способностью подстраиваться под нагрузку и увеличивать свой момент (усилие), что не приводит к остановке двигателя.
3-4 - характеризует разбег двигателя, работа на этом участке неустойчива.
Каковы преимущества двигателей раневых роторов над двигателями с короткозамкнутым ротором? Двигатели раневого ротора имеют следующие преимущества перед двигателями с короткозамкнутым ротором. Высокий пусковой момент и низкий пусковой ток. Плавное ускорение при большой нагрузке. При запуске нет аномального нагрева. Хорошие рабочие характеристики после сопротивления ротора вырезаются. Регулировка скорости.
Каковы недостатки двигателей раневых роторов по сравнению с двигателями с короткозамкнутым ротором? Двигатели раневого ротора имеют следующие недостатки по сравнению с двигателями с короткозамкнутым ротором. Низкое регулирование скорости при работе с сопротивлением в цепи ротора. Каково происхождение имени ротора с короткозамкнутым ротором?
При этом:
1-2 - возможна длительная работа, при которой ток, потребляемый из сети, не превышает предельно допустимого, т. е. номинального.
2-3 - допустима только кратковременная работа, т. к. при таких нагрузках I двигателя > I ном и возможен перегрев двигателя.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА n=f(M), полученная при номинальных условиях работы, т. е. при U=U ном, f=f ном и естественной схеме включения (без дополнительных элементов) называется ЕСТЕСТВЕННОЙ .
Когда этот тип ротора впервые появился, обычная белка была частым домашним животным. В обычной клетке, в которой он находился, содержалось вращающееся колесо, в которое могло попасть животное. Это колесо предоставило животное и развлечение. Так как ротор напоминал клетку для упражнений белки. он был назван ротором с короткозамкнутым ротором.
Почему коэффициент мощности 3-фазного асинхронного двигателя низкий при отсутствии жабы? Из-за воздушного зазора сопротивление магнитопровода 3-фазного асинхронного двигателя очень велико. Следовательно, ток, потребляемый двигателем без нагрузки, в значительной степени намагничивается; ток без нагрузки задерживает приложенное напряжение на большой угол. По этой причине п.ф. мало нагруженного 3-фазного асинхронного двигателя очень низкое.
РЕГУЛИРОВАНИЕ СКОРОСТИ АД С КЗР
Как следует из формулы
![]()
на частоту вращения можно влиять, изменяя частоту вращения магнитного поля
Путем изменения частоты питающего напряжения f 1 (с помощью специальных преобразователей) или изменением числа пар полюсов P п (изменяя схему катушек статора).
Почему коэффициент мощности полностью загруженного 3-фазного асинхронного двигателя не очень высок? 3-фазный асинхронный двигатель потребляет большой ток намагничивания из-за высокого сопротивления магнитной цепи; основной причиной является воздушный зазор. По мере добавления нагрузки активная составляющая тока увеличивается, что приводит к увеличению коэффициента мощности.
Каковы преимущества перекошенных слотов в роторе двигателя с короткозамкнутым сердечником? Обычная практика заключается в использовании ротора двигателя с короткозамкнутым ротором с перекошенными пазами, то есть прорези, которые не параллельны оси вала. Эта схема обеспечивает следующие преимущества.
В обоих случаях величина скольжения практически остается неизменной.
Также частоту вращения двигателя можно изменить, воздействуя на скольжение S. Это можно сделать, изменяя величину напряжения, питающего двигатель, или изменяя сопротивление ротора (если это позволяет конструкция ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА , полученная при условиях работы, отличающихся от номинальных, называется ИСКУССТВЕННОЙ .
Это уменьшает шум двигателя и вибрацию. Он увеличивает пусковой момент и уменьшает пусковой ток. Это увеличивает сопротивление ротора за счет увеличения длины стержня ротора. Как вы будете проектировать ротор двигателя с короткозамкнутым ротором, чтобы иметь высокий пусковой момент?
Когда требуется высокий пусковой крутящий момент, можно использовать безвоздушный сепаратор со специально разработанным ротором без значительного снижения эффективности, но с некоторым снижением номинальной мощности. Это может быть достигнуто одним из следующих двух способов.
Рассмотрим эти способы.
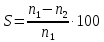
ВЛИЯНИЕ ЧАСТОТЫ f НА СКОРОСТЬ ДВИГАТЕЛЯ

Из
теории машин известно, что для обеспечения
эффективной работы двигателя при
частотном регулировании необходимо с
изменением f
изменять и подводимое напряжение
настолько, чтобы отношение U/f
оставалось
величиной постоянной. Очевидно, что это
условие можно выполнить только при
уменьшении f<50
Гц,
потому что уменьшение напряжения U Штанги ротора можно сделать очень глубокими, так что благодаря скин-эффекту их сопротивление будет высоким при запуске, когда частота ротора будет равна частоте питания. Используя двойной ротор с короткозамкнутым ротором. Почему максимальный крутящий момент асинхронного двигателя с короткозамкнутым ротором называется вытягивающим моментом? Максимальный крутящий момент асинхронного двигателя с короткозамкнутым ротором также называется крутящим моментом затяжки из-за того, как двигатель реагирует на перегрузку. Обычно считается, что токарный станок остановится на тяжелом разрезе. Машина будет замедляться, поскольку ее режущая нагрузка увеличивается до тех пор, пока она не заглохнет и не начнет громко и громко рычать. Это условие будет сохраняться до тех пор, пока нагрузка не будет удалена или не сработает предохранитель.
При увеличении f>50 Гц следовало бы пропорционально увеличить и напряжение U>U ном, однако, это не допустимо по условия эксплуатации двигателя. Это обстоятельство отразится на форме механической характеристики.
Отметим, что в любом случае при изменении f изменится и частота вращения магнитного поля (т. е. положение точки n 1 на механической характеристике). Таким образом, положение точки n 1 может быть ориентиром в изображении искусственных механических характеристик.
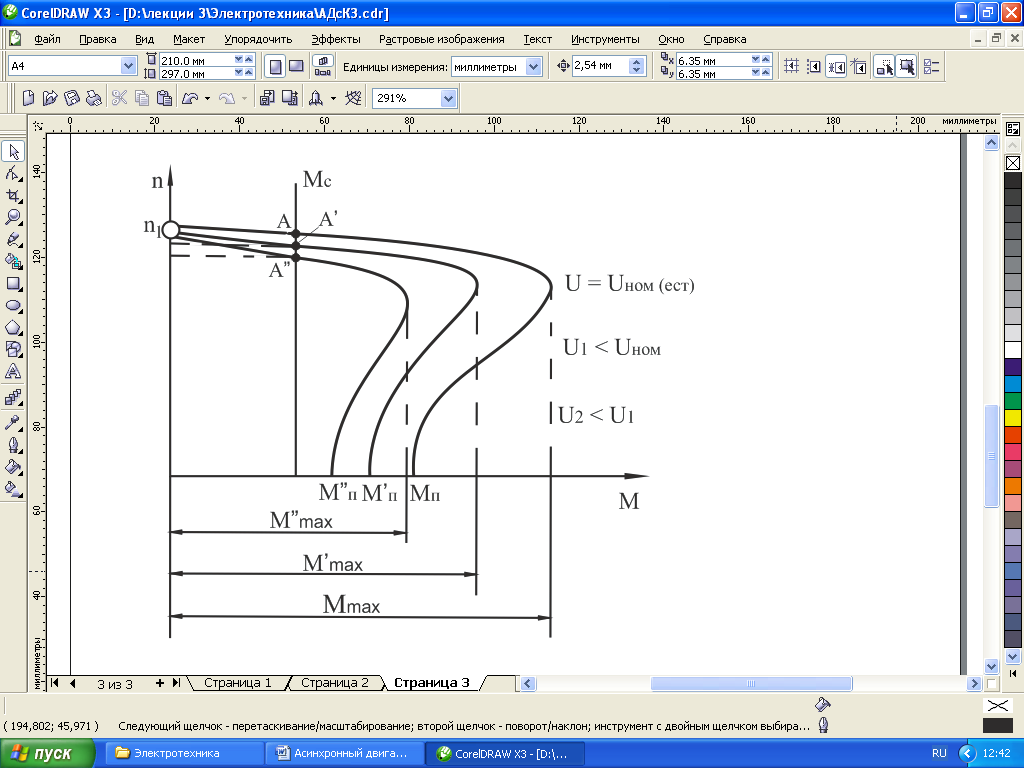
Если привести механическую характеристику механическую характеристику механизма (пусть М с =const, где М с - момент сопротивления), то можно оценить диапазон регулирования скорости при частотном регулировании, где А, А", А" - рабочие точки, полученные при условии М дв =М с.
Достоинства частотного способа регулирования скорости АД : плавность регулирования: плавно изменяя f, получаем большое количество искусственных характеристик, а, следовательно, и скоростей; большой диапазон с регулировкой как вверх так и вниз от номинальной (двухзонное регулирование).
Недостатки : необходимость установки частотного преобразователя, что значительно увеличивает стоимость электропривода.
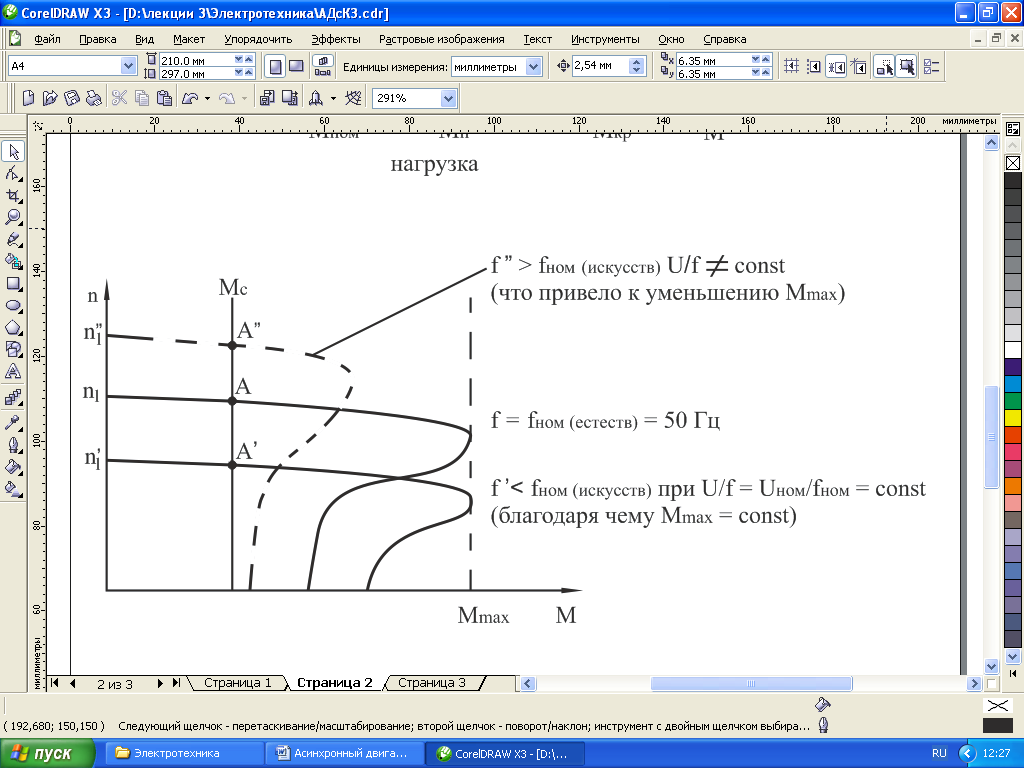
ПОЛЮСНОЕ
РЕГУЛИРОВАНИЕ
предусматривает
возможность изменения числа пар полюсов
P п.
Такой способ возможен только у
специальных - многоскоростных,
асинхронных двигателей и достигается
за счет переключения отдельных секций,
из которых состоит катушка (обмотка)
статора с последовательного соединения
на параллельное или наоборот, причем
число пар полюсов при последовательном
соединении больше в 2 раза, чем при
параллельном, т. е. P п
посл. =2P п
парал. ,
а, следовательно,
![]() .
.
Очевидно, что положение точки n 1 на механической характеристике изменится в 2 раза.
Достоинства полюсного регулирования : простота реализации, отсутствие специальных преобразующих устройств в цепи питания двигателя.
Недостатки : ступенчатость при регулировании, небольшой диапазон регулирования.
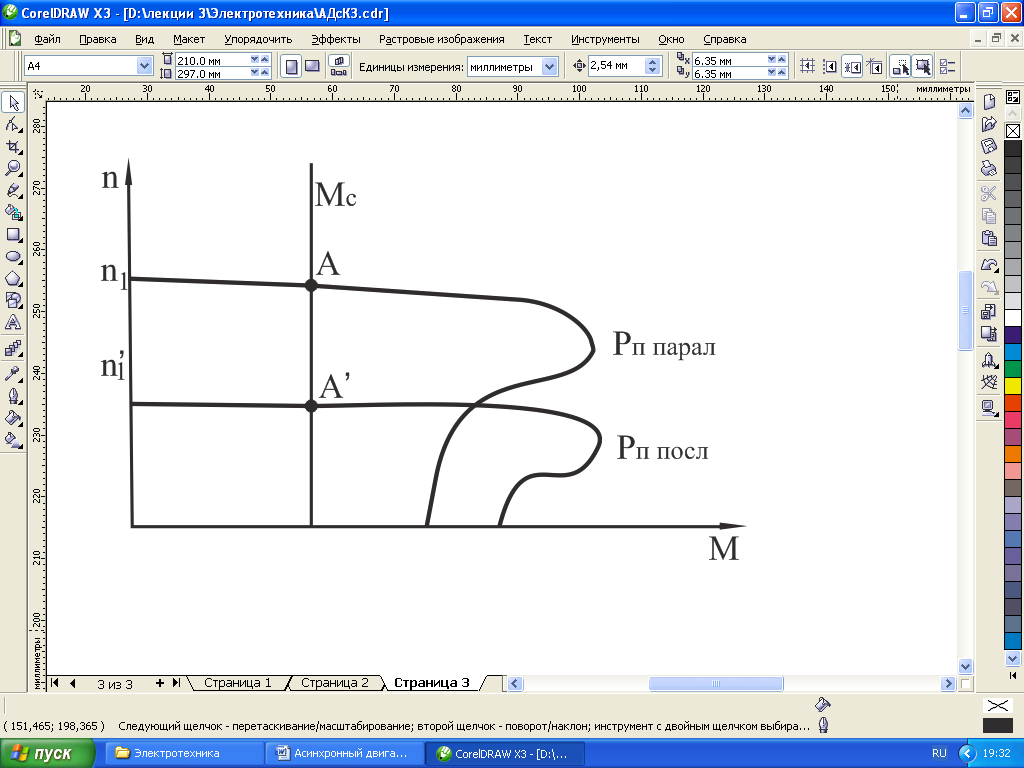
РЕГУЛИРОВАНИЕ СКОРОСТИ ИЗМЕНЕНИЕМ ВЕЛИЧИНЫ ПИТАЮЩЕГО НАПРЯЖЕНИЯ U
При этом способе частота вращения магнитного поля () остается постоянной, а частота вращения ротора изменяется за счет скольжения. Это можно объяснить тем, что с уменьшением питающего напряжения сильно (квадратичная зависимость) снижается М двигателя, что при прежней нагрузке приводит к снижению скорости, а, следовательно, и скольжения. При построении искусственных механических характеристик исходим из того, что точка n 1 , соответствующая частоте вращения магнитного поля, не изменится, напряжение U можно изменять только в сторону уменьшения, а, следовательно, моменты М п и М мах уменьшатся, т. к. М~U 2 .
Недостаток : малый диапазон регулирования скорости (оценки скорости при работе в точках А, А", А"). Поэтому данный способ регулирования применяется редко.











