по дисциплине
Электромеханические системы
РАСЧЁТ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ
Вариант 13
Выполнил: ст. гр. УИТ – 53
Колотилин И.С.
Мефёдова Ю. А.
Задача 1. Трехфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 180 М2, используемый в качестве электропривода насосного агрегата консольного типа марки ВК 10/45, предназначенного для перекачивания воды для технических нужд, негорючих и нетоксичных жидкостей, имеет следующие номинальные данные: мощность на валу Р 2н = 30 кВт; скольжение S н = 0,025 (2,5%); синхронная частота вращения n 1н =3000 об/мин; коэффициент полезного действия η н = 0,905 (90,5%); коэффициент мощности обмотки статора cos φ н =0,88. Известны также: отношение пускового момента к номинальному М п / М н =1,7; отношение пускового тока к номинальному I п /I н =7,5; отношение максимального (критического) вращающего момента к номинальному М max /M н =2,7. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц. Требуется определить:
номинальную частоту вращения ротора двигателя;
вращающий номинальный, критический и пусковой моменты двигателя;
мощность, потребляемую двигателем из сети Р 1н;
номинальный и пусковой токи;
5)пусковой ток и вращающие моменты, если напряжение в сети снизилось по отношению к номинальному на 5, 10 и 15% (U c = 0,95∙U н; U c = =0,9∙U н; U c = 0,85∙U н).
1. Номинальная частота вращения:
n 2н = n 1н ∙(1 – S н ) = 3000∙(1 - 0,025) = 2925 об/мин.
2. Номинальный вращающий момент на валу:
3. Пусковой вращающий момент двигателя:
М п = 1,7∙М н = 1,7∙97,95 = 166,5 Н∙м.
4. Максимальный вращающий момент:
М m ах = 2,7∙М н = 2,7∙97,95 = 264,5 Н∙м.
5. Номинальную мощность Р 1н, потребляемую двигателем из сети, определим из выражения:
η н= Р 2н /Р 1н Р 1н = Р 2н / η н = 30/0,905 = 33,15 кВт;
при этом номинальный ток, потребляемый двигателем из сети, может быть определен из соотношения:
а пусковой ток при этом будет:
I n = 7,5∙I 1н = 7,5∙57 = 427,5 А.
6. Определяем вращающий момент при снижении напряжения в сети:
− на 5%. При этом на двигатель будет подано 95% U H , или U = 0,95∙U н . Так как известно, что вращающий момент на валу двигателя пропорционален квадрату напряжения М ≡U 2 , то он составит (0,95) 2 = 0,9 от номинального. Следовательно, пусковой вращающий момент будет:
М 5% = 0,90∙М п = 0,9∙166,5 = 149,9 Н∙м;
− на 10%. При этом U =0,9∙U н ;
M 10 % = 0,81∙М п = 0,81∙166,5 = 134,9 Н∙м;
− на 15%. В данном случае U= 0,85∙U н;
М 15% = 0,72∙166,5 = 119,9 Н∙м.
Отметим, что работа на сниженном на 15% напряжении сети допускается, например, у башенных кранов только для завершения рабочих операций и приведения рабочих органов в безопасное положение.
7. Находим, как влияет аналогичное снижение напряжения на пусковой ток двигателя I п:
− на 5%. Учитывая, что пусковой ток можно приближенно считать пропорциональным первой степени напряжения сети, получим:
I п5 % ≈0,95∙I п = 0,95∙427,5 = 406,1 А;
I п10 % ≈0,9∙I п = 0,9∙427,5 = 384,8 А;
I п15 % ≈0,85∙I п = 0,85∙427,5 = 363,4 А.
Задача 2. Трёхфазный асинхронный двигатель с короткозамкнутым ротором типа АИР 13256 имеет следующие номинальные данные: мощность на валу Р 2н = 5,5 кВт; скольжение S н = 0,04 (4%); синхронная частота вращения n 1н =1000 об/мин; коэффициент полезного действия η н = 0,85 (85%); коэффициент мощности обмотки статора cos φ н = 0,8. Известны также: отношение пускового момента к номинальному М п / М н =2; отношение пускового тока к номинальному I п /I н =7; отношение максимального (критического) вращающего момента к номинальному М max /M н =2,2. Питание двигателя осуществляется от промышленной сети переменного тока 380/220 В, 50 Гц.
Определить мощность, потребляемую двигателем из промышленной сети переменного тока 220/380В, 50Гц, ток в цепи статора при включении в сеть 220/380В и 220/127В, номинальные вращающий момент на валу двигателя.
1. Мощность, потребляемая трёхфазным двигателем из сети при номинальном режиме работы:
Р 1н = Р 2н /η н = 5,5/0,85 = 6,47кВт.
2. Ток, потребляемый обмоткой статора из сети при соединении обмотки:
− звездой:
− треугольником:
3. Номинальный вращающий момент на валу двигателя.
Сначала найдём номинальную частоту вращения:
n 2н = n 1н ∙(1 – S н ) = 1000∙(1 - 0,04) = 960 об/мин.
4. Находим число пар полюсов р обмотки статора, имея в виду, что частота промышленной сети f = 50 Гц:
Задача 3. Для привода промышленной вентиляционной установки используется трехфазный асинхронный двигатель с короткозамкнутым ротором типоразмера АИР 13256. Используя его технические данные, приведенные в задаче 2 , построить для него механическую характеристику в виде зависимости n 2 = f(М).
Из выражения:

где n 2н - частота вращения ротора двигателя при номинальной нагрузке;
n 1 - синхронная частота вращения магнитного поля статора (в этом случае n 1 = 1000 об/мин);
S н - скольжение при номинальной нагрузке (S H = 0,04)
Определяется величина частоты вращения ротора двигателя в номинальном режиме:
n 2н = 1000∙(1 - 0,04) = 960 об/мин.
2. По значениям S н
и
 ,находим
критическое скольжение:
,находим
критическое скольжение:
3. Находим номинальный М ном и максимальный (критический) М m ах моменты:
4. Для построения механической характеристики воспользуемся формулами:

 ,
,
где S - текущее значение скольжения.
Задаваясь значениями S от 1 до 0, с требуемым шагом (например так, как показано в таблице 3) вычисляем величины n и М , им соответствующие. Результаты заносим в эту таблицу и по ним строим механическую характеристику n 2 = f(М).
На ней отметим (*)А, соответствующую номинальному режиму работы.
Таблица 1 - Результаты расчета механической характеристики электродвигателя
|
n, об/мин | ||||||||||||
|
M, Н·м |
![]()
Рисунок 1 - Механическая характеристика трехфазного асинхронного двигателя п 2 = f (M ) .
Регулирование частоты вращения электроприводов является одной из важнейших задач современной электротехники. Разработка и применение рациональных способов регулирования позволяют повысить производительность механизмов, улучшить качество выпускаемой продукции, упростить механическую часть привода, уменьшить расход электроэнергии и т. д.
С регулированием частоты вращения не следует смешивать естественное изменение частоты вращения электродвигателя в соответствии с его механической характеристикой, когда изменяется нагрузка на валу привода. Регулирование - это принудительное изменение частоты вращения электропривода в зависимости от требований приводного механизма.
Любой способ регулирования характеризуют следующие основные показатели:
диапазон регулирования - отношение максимальной частоты вращения к минимальной, которое можно получить в приводе т.е. ;
плавность регулирования - число устойчивых скоростей, получаемых в данном диапазоне регулирования;
экономичность - учет затрат, связанных с созданием самого способа регулирования, и дополнительных потерь энергии, возникающих в приводе;
стабильность работы привода - изменение частоты вращения при изменении момента на валу двигателя. Стабильность работы целиком определяется жесткостью механических характеристик;
направление регулирования показывает, что частота вращения изменяется только вниз или только вверх от основной частоты вращения привода или же возможно регулирование и вверх и вниз.
Частоту вращения ротора асинхронного двигателя определяют по формуле:

где f- частота переменного тока; р - число пар полюсов обмотки статора; s - скольжение.
Из представленной выше формулы можно заключить, что частоту вращения асинхронного двигателя можно регулировать изменением одной из трёх величин:
Скольжения s;
Числа пар полюсов магнитного потока статора p;
Частоты тока в статоре f.
Рассмотрим возможности регулирования частоты вращения ротора путем изменения скольжения. Скольжение является функцией многих параметров двигателя:
s = f(R 1 , X 1 ;R 2 ; X 2 ; U),
где R 1 X 1 - активное и индуктивное сопротивление цепи статора,; R 2 , Х 2 - то же, ротора;
U - напряжение питания двигателя.
Из формулы видно, что для изменения скольжения s можно вводить дополнительные резисторы или индуктивности в цепи обмоток статора или ротора либо уменьшать напряжение питания двигателя.
Изменение напряжения.
Известно, что максимальный момент асинхронного двигателя пропорционален квадрату напряжения сети и механические характеристики при различных напряжениях имеют вид, показанный на рис.5.8, a. Анализ этих характеристик совместно с характеристикой момента сопротивления Мс.г грузоподъемного устройства показывает, что регулирование частоты вращения возможно в очень узком диапазоне. При напряжении 0,6 U н двигатель не запустится, так как Мп<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Несколько предпочтительнее регулирование двигателя, вращающего механизм с вентиляторным моментом сопротивления Мс.в, - диапазон регулирования расширяется.
Изменение параметров R 1 , X 1 , X 2 .
Увеличение указанных параметров оказывает почти такое же влияние на механические характеристики двигателя, как снижение напряжения, а повышение сопротивления R 1 к тому же еще увеличивает потери энергии в цепи статора.
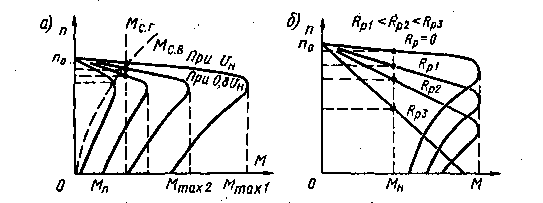
Рис.5.8 Механические характеристики асинхронного двигателя при изменении
напряжения и активного сопротивления цепи ротора
В конце 50-х годов получил некоторое распространение так называемый дроссельный электропривод, в котором увеличение сопротивления X 1 достигалось включением в цепь статора магнитного усилителя (дросселя насыщения). Главный недостаток таких электроприводов (в том числе при изменении напряжения U) состоит в том, что мощность скольжения полностью превращается в тепло в роторе, увеличивая перегрев двигателя. В дроссельных электроприводах к тому же уменьшается коэффициент мощности cosf.
Из сказанного следует, что увеличение параметров R 1 X 1 Х 2 или уменьшение U не только ради регулирования частоты вращения, но и в силу каких-то иных причин (например, влияния параметров сети) для асинхронного двигателя крайне нежелательно.
Изменение активного сопротивления цепи ротора.
Единственный параметр асинхронного двигателя, от которого не зависит максимальный момент двигателя, - это сопротивление R 2. . Следовательно, при введении в цепь ротора дополнительных резисторов сохраняется механическая перегрузочная способность двигателя и, что очень важно, потери энергии выделяются в основном на резисторах, т. е. за пределами двигателя.
Такой способ применим только для двигателей с фазным ротором и с кольцами. Сопротивление короткозамкнутого ротора изменять практически невозможно. Механические характеристики при различных сопротивлениях ротора показаны на рис.5.8, б.
Кратко процесс регулирования выглядит
следующим образом: М=Мс, n=const; -
- -
- -
- -
- -
- -
- -
- .Запись поясняется формулами (2-6).
.Запись поясняется формулами (2-6).
С точки зрения диапазона регулирования, плавности, экономичности этот способ аналогичен регулированию частоты вращения двигателя постоянного тока изменением сопротивления цепи якоря. Он применяется в электроприводах брашпиля и шпиля судов типов «Андижан», «Повенец».
Изменение числа пар полюсов.
Асинхронные двигатели, у которых трехфазная обмотка статора может создавать вращающееся магнитное поле с различным числом пар полюсов,
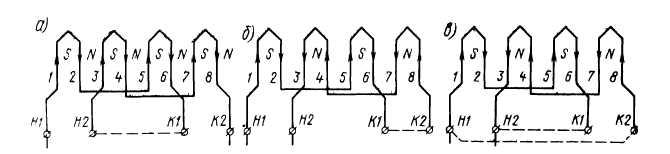
Рис.5.9. Схема, поясняющая принцип получения полюсопереключаемой
называются полюсопереключаемыми. Разработаны трехфазные обмотки, которые можно переключать на различное число пар полюсов в отношении: 2:1, 5:2, 7:3, 3:1 и т. д.
Принцип создания полюсопереключаемой обмотки поясним на примере однофазной обмотки, уложенной в восьми пазах. Обмотка состоит из двух полуобмоток. Если полуобмотки соединить последовательно, т. е. перемычка будет между выводами К 1 и Н 2 (рис.5.9, а), то такая обмотка будет создавать четыре пары полюсов (р=4). Число полюсов, создаваемых обмоткой, можно найти, задавшись направлением тока в ней и применив правило «буравчика» для определения направления силовых линий вокруг пазов.
Если полуобмотки соединить встречно-последовательно, т.е. перемычка между выводами К 1 и К 2 (рис.9, б), то такая обмотка будет создавать две пары полюсов (р = 2). При выбранном направлении тока поле между пазами 2 и 3, 4 и 5, 6 и 7, 8 и 1 взаимно уничтожается.
Полуобмотки можно соединить встречно-параллельно, т.е. перемычки между выводами H 1 и К 2 , Н 2 и К 1 (рис.9, в), тогда обмотка будет также создавать две пары полюсов (р=2).
Таким образом, существуют два способа переключения обмотки на меньшее число пар полюсов в отношении 2:1. Первый способ - переключение с последовательного соединения полуобмоток на встречно-последовательное, второй - переключение с последовательного соединения на встречно-параллельное. Рассмотрим каждый способ применительно к трехфазной обмотке двигателя..
При первом способе переключения обмотка, соединенная звездой, должна иметь 9 выводов на щитке (рис.5.10, а), а при соединении треугольником - 12 выводов (рис.5.10, б). После переключения характер соединения обмоток не меняется, т. е. звезда переключается в звезду, а треугольник - в треугольник.
Мощность двигателя при первом способе переключения остается постоянной, следовательно, изменяются номинальный и максимальный моменты двигателя. Совместное рассмотрение механических характеристик двигателя и различных механизмов (рис.5.10, в) показывает, что такой способ переключения наиболее целесообразен для регулирования частоты вращения металлорежущих станков.
В судовых электроприводах грузоподъемных устройств, брашпилей, шпилей широкое распространение получили трехскоростные асинхронные двигатели с тремя отдельными обмотками на статоре на различное число пар полюсов.
При втором способе переключения обмотка, соединенная звездой, имеет только 6 выводов (рис.5.11, а). После переключения получается соединение обмотки двойная звезда. Мощность двигателя в этом случае удваивается, а номинальный момент остается постоянным.
Совместное рассмотрение механических характеристик двигателя и различных механизмов (рис.5.11, б) показывает, что второй способ переключения целесообразно применять для регулирования частоты вращения грузоподъемных устройств.
Если обмотка соединена треугольником, то после переключения по второму способу получается соединение двойная звезда. Мощность двигателя при этом возрастает на 15%.
Рассмотрены наиболее простые способы переключения обмоток, дающие две ступени скорости. При более сложном переключении трехфазной обмотки можно получить три и даже четыре ступени скорости с самым. различным соотношением полюсов. Например, отечественные двигатели серии МАП с одной трехфазной обмоткой имеют три скорости (МАП-42/8-4-2, мощность 0,8/1, 8/2 кВт, частота вращения 700/1400/2800 об/мин) и четыре (МАП-52/8-6-4-2, мощность 1,2/2,5/3/4 кВт, частота вращения 460/700/920/1440 об/мин). Более четырех скоростей на практике не встречается, так как сильно усложняются обмотка и ее переключение. У двигателя МАП-52/8-6-4-2 на выводной щиток сделано 22 вывода.
В судовых электроприводах грузоподъемных устройств, брашпилей, шпилей широкое распространение получили трехскоростные асинхронные двигатели с тремя отдельными обмотками на статоре на различное число пар полюсов. Частота вращения

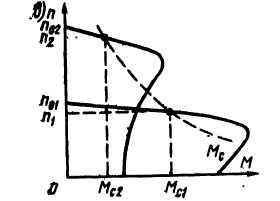
Рис.5.10. Первый способ переключения трёхфазной обмотки, соединенной звездой,
и треугольником, и соответствующие механические характеристики АД.
регулируется включением той или иной обмотки, но сами обмотки не переключаются.
Отечественная промышленность выпускает для судовых электроприводов многоскоростные асинхронные двигатели серии МАП, диапазон регулирования частоты вращения которых 6:1 либо 7:1 Обмотка первой скорости обычно имеет 26 или 28 полюсов.
Регулирование переключением пар полюсов отличается высокой экономичностью, поскольку ротор вращается при установившейся частоте со скольжением в пределах номинального и никаких дополнительных резисторов в цепь двигателя не включается. Серьезный недостаток этого способа - ступенчатость и ограниченное число скоростей.
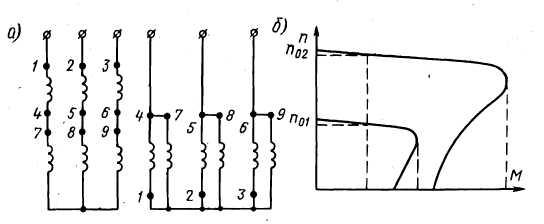
Рис.5.11. Второй способ переключения трехфазной обмотки, соединенной звездой, и
соответствующие механические характеристики асинхронного двигателя
Регулирование частоты вращения изменением частоты тока питающей сети (частотное регулирование).
Этот способ регулирования основан на изменении синхронной частоты вращения n 0 которая пропорциональна частоте тока в обмотке статора. Для осуществления такого регулирования необходим источник питания с регулируемой частотой токаf. В качестве источника применяются электромагнитные и полупроводниковые преобразователи частоты. Однако необходимо иметь в виду, что одновременно с изменением частоты питающего напряженияfбудет меняться максимальный электромагнитный момент двигателя. Поэтому для сохранения перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f изменять и напряжение сети U. Если регулирование частоты вращения двигателя производится при условии постоянства нагрузочного момента, то подводимое напряжение необходимо изменять пропорционально изменению частоты тока, так, чтобы их отношение оставалось величиной постоянной:
 ;
;
Частотное регулирование позволяет плавно изменять частоту вращения двигателей в широком диапазоне (до 12:1).
Регулирование частоты вращения изменением частоты тока - это самый рациональный и экономичный способ. Основные его достоинства:
Используется м обычный короткозамкнутый двигатель;
Регулирование с точки зрения потерь в двигателе является экономичным;
Достигаются большой диапазон и плавность регулирования;
Сохраняется жесткость механических характеристик, а следовательно и стабильность работы привода;
Рекуперативное торможение может осуществляться почти до полной остановки.
Вместе с тем известно, что частота тока судовой электростанции поддерживается постоянной и для регулирования частоты вращения двигателя требуется отдельный преобразователь частоты тока.
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (рис.5.12.).

Рис.5.12 Частотно регулируемый электропривод
Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой. Название «частотно регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних лет наблюдается широкое и успешное внедрение частотно регулируемого электропривода на судах, как для решения различных технологических задач, так и в системах электродвижения. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
В синхронном электрическом двигателе частота вращения ротора в установившемся режиме равна частоте вращения магнитного поля статора .
В асинхронном электрическом двигателе частота вращения ротора в установившемся режиме отличается от частоты вращения на величину скольжения .
Частота вращения магнитного поля зависит от частоты напряжения питания. При питании обмотки статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле
где – число пар полюсов статора.
Переход от скорости вращения поля , измеряемой в радианах, к частоте вращения , выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяютсяскалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где - постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 5.13 (а). Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f 2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.5.13 (б).

Рис.5.13 Характер зависимости напряжения питания от частоты для случая:
а) с постоянным моментом нагрузки
б) с вентиляторноым моментом нагрузки
При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
У преобразователей с непосредственной связью(рис. 5.14) силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.

Рис. 5.14 Преобразователь частоты с непосредственной связью
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5.15 показан пример формирования выходного напряжения для одной из фаз нагрузки.
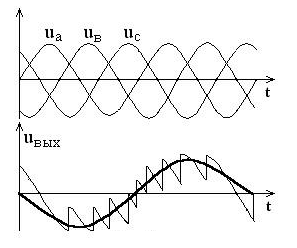
Рис.5.15 Формирования выходного напряжения для одной из фаз нагрузки
На входе преобразователя действует трехфазное синусоидальное напряжение u а, u в, u с. Выходное напряжение u вых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Практически самый высокий КПД относительно других преобразователей (98,5% и выше),
Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах,
Относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока (рис. 5.16.).
В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.

Рис 5.16 Преобразователь частоты с звеном постоянного тока
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее времязанимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 - 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая неэнергоемкая система управления, самая высокая рабочая частота
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в преобразователях частоты снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Типовая схема низковольтного преобразователя частоты на IGBT представлена на рис. 5.17 В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента преобразователя.
Переменное напряжение питающей сети (u вх.) с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (u выпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
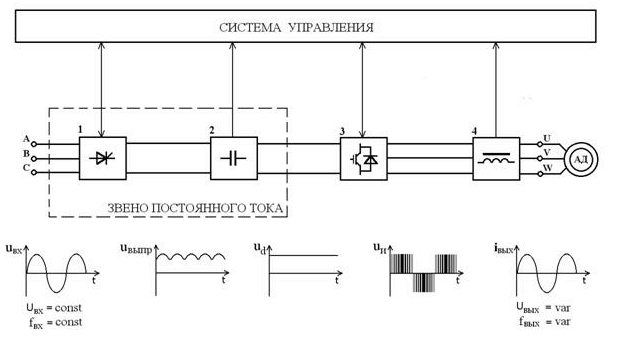
Рис. 5.17 Типовая схема преобразователя частоты на IGBT транзисторах
В инверторе осуществляется преобразование постоянного напряжения u d в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения u и может достигаться регулированием величины постоянного напряжения u d , а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (U вых = var, f вых = var).
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это .
Q = √(S 2 - P 2)
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √(3046 2 - 2650 2) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
На шильдике мы видим, что при питании переменным током , ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ((n - n1 )/n) *100%
Для нашего примера s = ((3000 - 2870)/3000) *100% = 4,3%.

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
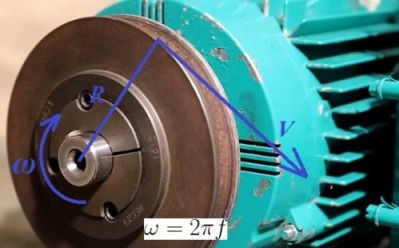
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
v = ωR
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
P = ω М
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
М = FR
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 - обозначения начала фаз. С3, С4 и С5 - соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M) .
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 - непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 - номинальный режим работы. Точка 3 - частота вращения достигла критического значения. Пусковой момент Мпуск - точка 4.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн - номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск - из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30-40% от номинального.
Формула расчета при критическом скольжении:
Ток в начальный момент пуска:
Все значения отражают электромеханическую характеристику.
 Рабочие характеристики асинхронного электродвигателя - это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Рабочие характеристики асинхронного электродвигателя - это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика . Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98-92,5 % частоты вращения n 1 (скольжение s ном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент M max двигатель развивает при некоторое скольжении s kp , составляющем 10-20%. Отношение M max /M ном определяет перегрузочную способность двигателя, а отношение М п /М ном - его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки М вн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения M max (до точки В). Если нагрузочный момент М вн превысит момент M max , то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5-7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R 1п (кривая 2), R 2п (кривая 3) и R 3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R 2 и возрастает s кp . При этом уменьшается пусковой ток. Пусковой момент М п также зависит от R 2 . Можно так подобрать сопротивление реостата, чтобы пусковой момент М п был равен наибольшему М max .
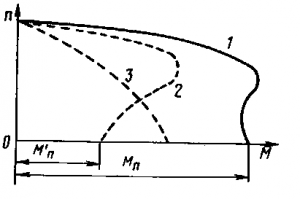
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент М п такого двигателя значительно больше, чем момент М’ п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М 2 , тока статора I 1 коэффициента полезного действия? и cos? 1 , от полезной мощности Р 2 = Р mx при номинальных значениях напряжения U 1 и частоты f 1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10-20%. Частота вращения n с ростом отдаваемой мощности Р 2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М 2 пропорционален мощности Р 2 , он меньше электромагнитного момента М на значение тормозящего момента М тр, создаваемого силами трения.
Ток статора I 1 , возрастает с увеличением отдаваемой мощности, но при Р 2 = 0 имеется некоторый ток холостого хода I 0 . К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75-0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos? 1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7-0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.

При нагрузках 25-50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5-0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25-0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении - не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75U ном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5-1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.









