Statyczna charakterystyka mechaniczna silnika nazywana zależnością prędkości silnika. w = | (M). Niemal wszystkie silniki elektryczne mają tę właściwość, że ich prędkość jest malejącą funkcją momentu obrotowego silnika. Dotyczy to wszystkich konwencjonalnych silników elektrycznych stosowanych w przemyśle, to znaczy silników prądu stałego o wymuszeniu niezależnym, sekwencyjnym i mieszanym, a także do asynchronicznych bezszczotkowych i kolektorowych silników prądu przemiennego. Jednak stopień zmiany prędkości wraz ze zmianą momentu zmienia się w zależności od silnika i charakteryzuje się tzw sztywność ich właściwości mechaniczne.
Sztywność charakterystyk mechanicznych napędu- jest stosunkiem momentu narastania wytworzonego przez urządzenie elektromotoryczne, gdy prędkość się zmienia, do odpowiadającej różnicy prędkości kątowych napędu elektrycznego:
![]()
Zazwyczaj w obszarach roboczych mechaniczna charakterystyka silników ma ujemną sztywność β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Sztywność charakterystyki mechanicznej w sensie geometrycznym jest nachyleniem charakterystyki mechanicznej silnika.
Jeśli porównamy cechy 1 i 2, wówczas charakterystyka 1 jest bardziej miękka, ponieważ jej nachylenie jest mniejsze
DM 1\u003e DM 2 Þ b 1\u003e b 2, od i.
Charakterystyki mechaniczne silników elektrycznych można podzielić na cztery główne kategorie:
1. Absolutnie sztywna charakterystyka mechaniczna (β = ∞) jest cechą, w której prędkość ze zmianą momentu pozostaje niezmieniona. Silniki synchroniczne mają tę charakterystykę (linia prosta 1 na Rys. 1).
2. Sztywna charakterystyka mechaniczna - Jest to cecha, w której prędkość ze zmianą momentu, choć maleje, ale w niewielkim stopniu. Sztywne właściwości mechaniczne mają silniki prądu stałego o niezależnym wzbudzeniu, a także silniki asynchroniczne w części roboczej cech mechanicznych (krzywa 2 na ryc. 1).
W przypadku silnika asynchronicznego sztywność w różnych punktach charakterystyki mechanicznej jest różna. Pomiędzy maksymalnymi (krytycznymi) wartościami momentów w trybie Mk, d i generatora Mk, g, charakterystyka silnika indukcyjnego ma stosunkowo dużą sztywność.
 3. Miękka mechaniczna charakterystyka - Jest to cecha, w której prędkość zmienia się znacząco wraz ze zmianą momentu. Ta charakterystyka ma silnik prądu stałego o sekwencyjnym wzbudzeniu, zwłaszcza w strefie małych momentów (krzywa 3 na ryc. 2). W przypadku tych silników sztywność nie jest stała dla wszystkich punktów charakterystycznych.
3. Miękka mechaniczna charakterystyka - Jest to cecha, w której prędkość zmienia się znacząco wraz ze zmianą momentu. Ta charakterystyka ma silnik prądu stałego o sekwencyjnym wzbudzeniu, zwłaszcza w strefie małych momentów (krzywa 3 na ryc. 2). W przypadku tych silników sztywność nie jest stała dla wszystkich punktów charakterystycznych.
Silniki DC mieszanego wzbudzenia można przypisać do drugiej lub trzeciej grupy, w zależności od sztywności charakterystyk mechanicznych.
4. Absolutnie miękka charakterystyka mechaniczna (β = 0) to charakterystyka, w której moment obrotowy silnika ze zmianą prędkości kątowej pozostaje niezmieniony. Ta charakterystyka ma, na przykład, silniki prądu stałego o niezależnym pobudzeniu, gdy jest zasilana ze źródła prądu lub gdy pracuje w zamkniętych układach napędowych w trybie stabilizacji prądu twornika (linia prosta 4 na fig. 2).
Charakterystyka mechaniczna działającej maszyny - jest zależnością prędkości działającej maszyny od momentu oporu, który tworzy w = (M s).
Charakterystyka mechaniczna opisuje obciążenie napędu.
Klasyfikacja typowych ładunków:
1. aktywny moment oporu M z = const
Przykład: napęd wyciągarki żurawia.

Obciążenie jest w stanie uruchomić sam mechanizm, dlatego nazywane jest aktywnym. Konstrukcje muszą zapewniać hamulec postojowy.
2. Reaktywny moment oporu M = const (obciążenie typu stałości chwili)
Charakterystyczne dla mechanizmów "tarcia suchego".

M c = M 0 znak (w).
w\u003e 0 Þ M z\u003e 0; w<0 Þ М с <0.
Moment reakcji jest reakcją na prędkość w.
3. tarcie lepkie
M z = α in. T ω
Moment oporu jest proporcjonalny do prędkości.

bW - współczynnik tarcia lepkiego.
4. moment wentylacji

Mc = znak kw 2 (w).
Charakterystyka dla wentylatorów odśrodkowych i pomp.
Jeśli zamkniesz wlot, moment obciążenia zmniejszy się.
P = M c w - moc.
5. stałość mocy P = const
Gdzie P z = const.
Jest często używany do głównych napędów obrabiarek (toczenie, frezowanie, wytaczanie, szlifowanie i inne maszyny).
w max ∙ M min = w min ∙ M max = const.
Zastanów się, obracając:
w = const, F p = const.



Do strugarki:
P 1 = v min ∙ F max - skok roboczy, P 1 = v maks. ∙ F min - bieg jałowy.
P 1 »P 2 = const.
Funkcje doboru silnika:

Gdy P 1 = 5 kW, uzyskujemy Pw = 5 ∙ 100 = 500 kW.
Bezpośredni dobór silnika pod względem limitów prowadzi do przeszacowania zainstalowanej mocy silnika przez D w razy, gdzie D w jest zakresem regulacji prędkości. W rzeczywistości moc silnika można zmniejszyć celowo, wybierając zakres regulacji prędkości.
Dla DFT HB kontroluje prędkość prądów wzbudzenia.
TEMAT WYKŁADU 10
Charakterystyka mechaniczna silników elektrycznych
PLAN WYKŁADU
1. Naturalny i sztucznywłaściwości mechanicznesilniki elektryczne
Charakterystyka mechaniczna silnika, niezależnie od rodzaju prądu, odnosi się do zależności prędkości kątowej wału silnika ω (zwanego dalej silnikiem) od momentu elektromagnetycznego silnika, czyli zależności ω ().
Tutaj należy wykonać ważną uwagę: zgodnie z równaniem momentów, w stanie ustalonym =, elektromagnetyczny moment obrotowy silnika zrównoważony przez moment statyczny (moment odporność na om) mechanizm. Oznacza to wielkość momentu elektromagnetycznego silnika zależy całkowicie od momentu mechanizmu?? im większy moment hamowania mechanizmu, tym większy moment obrotowy silnika i na odwrót.
To znaczy dla dowolnego silnika wielkość wejściowa jest momentem mechanizmu i wyjściem?? jego prędkość
Prędkość prawie wszystkich silników elektrycznych jest malejącą funkcją momentu obrotowego silnika, to znaczy wraz ze wzrostem momentu obrotowego prędkość spada [CHIL 33]. Ale stopień zmiany prędkości różnych silników elektrycznych jest inny i znamienny parametrem sztywność cech mechanicznych.
Sztywność charakterystyka mechaniczna napędu β jest to stosunek różnicy momentów elektromagnetycznych silnika przy różnych prędkościach do odpowiadającej różnicy prędkości kątowych napędu elektrycznego.
β = (M 2 M M 1) / (ω2 ?? 1) = Δ / Δω
Zazwyczaj w obszarach roboczych mechaniczna charakterystyka silników elektrycznych ma ujemną sztywność β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Są naturalne i sztucznewłaściwości mechanicznei silniki elektryczne.
Naturalna mechaniczna właściwość? jest to zależność ω (), podjęta w normie warunki pracy silnika, tj. przy nominalnych parametrach główne i brak dodatkowych rezystoróww łańcuchach uzwojeń silnika.
Parametry zasilacza obejmują: przy stałym prądzie? napięcie na AC? napięcie i częstotliwość prądu.
Charakterystyka podjęta na warunkach inne niż normalnezwany sztucznym.
Sztuczne charakterystyki można uzyskać przez zmianę parametrów silnika, na przykład przez wprowadzenie rezystorów do obwodu uzwojenia twornika silnika prądu stałego lub do obwodu uzwojenia wirnika silnika indukcyjnego, lub przez zmianę parametrów zasilania sieciowego, tj. Napięcie i częstotliwość AC.
Każdy silnik elektryczny ma jeden naturalny i wiele sztucznych cechy. Liczba sztucznych charakterystyk zależy od liczby kroków elementu regulacyjnego, na przykład od liczby kroków regulacyjnego rektora w obwodzie uzwojenia twornika silnika prądu stałego. Jeśli silnik ma takie kroki? pięć, to ten silnik ma sześć cech? pięć sztucznych i jeden naturalny.
Sztuczne właściwości mechaniczne są wykorzystywane do uzyskania takich warunków pracy silnika, jak kontrola prędkości, hamowanie wsteczne, hamowanie elektryczne itp.
Zastanów się oczywiścies charakterystyka mechaniczna silnikówróżne typy.
Ryc. 10.1 Naturalne mechaniczne (a) i kątowe (b) charakterystyki silnika synchronicznego; θ kąt opóźnienia osi wirnika od osi pola magnetycznego uzwojenia stojana
Naturalna mechaniczna charakterystyka silnika synchronicznego
Naturalny mechanicznycharakterystyczne silnik synchroniczny(rys. 10.1a)? absolutnie trudne?? to jest charakterystyka w którejprędkość ze zmianą momentu nie zmienia sięjego sztywność (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C Trwałość prędkości wirnika silnika synchronicznego jest wyjaśniona przez charakterystykę kątową silnika synchronicznego θ () w następujący sposób (rys. 10.1 b), jeżeli obciążenie mechaniczne nie jest przyłożone do wirnika, wówczas osie wirnika i wirujące pole magnetyczne uzwojenia stojana pokrywają się. θ = 0 ° (punkt 0 na Rys. 10.1 b). Jeżeli moment elektromagnetyczny silnika wynosi M = 0, silnik pracuje na biegu jałowym.
Jeśli przyłożysz mechaniczne obciążenie do wału silnika i zwiększysz je, wówczas wirnik pod wpływem obciążenia mechanicznego będzie opóźniał się za polem magnetycznym uzwojenia stojana pod wzrastającym kątem θ.
Im większe obciążenie mechaniczne na wale, tym większy kąt i tym większy obrotowy moment elektromagnetyczny silnika.
Taki jednoczesny wzrost momentu obrotowego silnik, spowodowany wzrostem momentu hamującego mechanizmu po prostu zapewnia stabilność prędkości obrotowej silnika (na rys. 10.1 wykres cech od = 0 do =).
Jednak stała prędkość obrotowa silnika jest utrzymywana tak długo, jak długo kąt ≤ 90 °. Przy θ = 90 ° silnik wytwarza moment krytyczny (maksymalny) (punkt A na rys. 10.1 a).
Jeżeli przy θ = 90 ° ponownie w celu zwiększenia obciążenia mechanicznego (θ\u003e 90 °), zmniejszy się elektromagnetyczny moment obrotowy silnika (odcinek AB charakterystyki kątowej), tj. ten moment będzie mniejszy niż moment hamowania mechanizmu. W rezultacie prędkość wirnika silnika zmniejszy się, a na końcu wirnik zatrzyma się.
Ponieważ prędkość wirnika jest mniejsza niż prędkość wirującego pola magnetycznego uzwojenia stojana, mówi się, że silnik wypadł niezsynchronizowany.
Jak wynika z charakterystyki kątowej silnika, stan utraty synchronizmu silnika wynosi: θ≤90 °.
W praktyce kąt nominalny wynosi θ = 20 ... 40 °.
Zakres silników synchronicznych: na statkach? jak wioślarskie silniki elektryczne obracające śruby; na brzegu? napędzać potężne mechanizmy, takie jak sprężarki w przepompowniach gazu.
Naturalna charakterystyka mechaniczna silnika prądu stałego
Naturalny charakterystyka mechaniczna silnika prądu stałegorównoległe pobudzenie (ryc. 8.5)?cóż, ona, ponieważ jego twardość
β = Δ / Δω ≤ 10%.

Ryc. 10.2 Naturalny charakterystyka mechaniczna równoległego silnika wzbudzenia prądu stałego
Oznacza to, że przy zmianie momentu obrotowego elektromagnetycznego silnika w szerokim zakresie jego prędkość jest dość stabilna (to znaczy zmienia się tylko nieznacznie).
Takie silniki są stosowane tam, gdzie, gdy obciążenie mechanizmu zmienia się w szerokim zakresie, prędkość silnika nie powinna się gwałtownie zmieniać? w pompach elektrycznych, wentylatorach itp.

Ryc. 10.3 Naturalny charakterystyka mechanicznawzbudzenie szeregowe silnika DC
Naturalny charakterystyka mechaniczna silnika prądu stałego o sekwencyjnym wzbudzeniu (ryc. 10,3)? miękkie ponieważ jego sztywność
β = Δ / Δω\u003e 10%.
Oznacza to, że przy zmianie momentu obrotowego elektromagnetycznego silnika, nawet w małych granicach, jego prędkość zmienia się znacząco.
Przypomnij dwie istotne cechy tego silnika. Wzbudzenie szeregowe silnika DC:
prędkość silnika wzrasta dramatycznie, silnik "jedzie wyścigowo". Dlatego ten silnik nie może pozostać bez obciążenia na wale;
Silniki te nie są używane na statkach, ale są wykorzystywane na lądzie, na przykład w transporcie elektrycznym, w szczególności w trolejbusach, gdzie nie pozostają bez obciążenia na wale i gdzie potrzebne są duże punkty startowe (przy uruchamianiu trolejbusu).

Ryc. 10.4 Naturalny charakterystyka mechaniczna silników prądu stałego o wymieszaniu mieszanym: 1 s wzbudzanie równoległe sekwencyjne;
2 - sekwencyjnie równoległe wzbudzenie
Naturalny charakterystyka mechaniczna silnika prądu stałego o mieszanym wzbudzeniu jest pośrednia między charakterystyką silników wzbudzenia równoległego i sekwencyjnego, ponieważ magnetyczny strumień wzbudzenia powstaje przez wspólne działanie obu uzwojeń? równoległe i spójne.
Istnieją dwa rodzaje silników mieszanego wzbudzenia:
2. konsekwentnie wzbudzenie równoległe, w którym główna część powstałego strumienia magnetycznego powstaje przez szeregowe uzwojenie (do 70%, pozostałe 30%? równolegle).
Dlatego wykres charakterystyki mechanicznej silnika pierwszego typu jest bardziej sztywny niż silnik drugiego typu.
Obie właściwości mechaniczne?? miękkie ponieważ ich sztywność
β = Δ / Δω\u003e 10%.
Na statkach silniki o mieszanym wzbudzeniu są używane w sterowanych napędach elektrycznych? wciągarki, dźwigi, windy kotwiczne i wieże.
Naturalna mechaniczna charakterystyka silnika asynchronicznego
Naturalny charakterystyka mechaniczna silnika asynchronicznego ma dwie sekcje? niepracujący (przyspieszający) AV i pracujący samolotD (rys. 8.8).

Ryc. 10.5 Naturalne charakterystyka mechaniczna silnika asynchronicznego
Po uruchomieniu silnik rozwija moment rozruchowy(segment OA), po czym przyspiesza wzdłuż trajektorii ABC do punktu C. Jednocześnie wzrasta zarówno prędkość, jak i moment obrotowy w segmencie AB, aw punkcie B silnik osiąga maksymalny moment obrotowy. Na odcinku Słońca prędkość wzrasta, a moment maleje, do wartości nominalnej (punkt C). Na działceBC silnik przeciążonyponieważ w dowolnym miejscu w tym obszarze moment elektromagnetyczny silnika jest większy niż nominalny (> >).
W normalnych warunkach silnik pracuje w sekcji CD którego sztywność
β = Δ / Δω < 10%.
Oznacza to, że gdy moment obrotowy zmienia się w szerokim zakresie, prędkość silnika zmienia się nieznacznie.
Silniki asynchroniczne znalazły najszersze zastosowanie na statkach z elektrownią prądu przemiennego.
Przemysł produkuje specjalnie dla statków silniki asynchroniczne z różnych serii, na przykład 4A ... OM2 (czwarta seria silników asynchronicznych), MAP (morskie przełączanie z biegunem asynchronicznym), MTF (z wirnikiem fazowym), itp.
Z tymi silnikami serii 4A? pojedyncza prędkość, seria MAP? dwu- i trzy prędkościowa seria MTF? liczba obrotów jest określona przez obwód sterujący (do 5 prędkości).
Silnik równoległego wzbudzenia jest silnikiem prądu stałego, którego uzwojenie wzbudzenia jest połączone równolegle z uzwojeniem twornika (rys. 1). Podczas przyjmowania charakterystyki napięcie znamionowe U n = const doprowadzane jest do obwodu twornika.
Ryc. 1 - Równoległy obwód silnika wzbudzenia
Prąd pobierany przez silnik z sieci jest określony przez sumę I = I a + I c, prąd wzbudzenia wynosi zwykle I c = (0,03 ... 0,04) I n. Wszystkie charakterystyki silnika są usuwane przy stałych oporach w obwodach wzbudzających r в = const i kotwach
Szybkość reakcji.
Zależność n = f (I a) z U n = const i I in = const
Z równania EMF dla silnika elektrycznego
![]()
![]()
Jak można zauważyć na podstawie wyrażenia, prędkość obrotowa silnika zależy od dwóch czynników - zmian prądu i przepływu obciążenia. Gdy prąd obciążenia wzrasta, spada napięcie rezystancji obwodu twornika, a prędkość silnika maleje.
Poprzeczna reakcja armatury demagnetyzuje silnik, tj. ze wzrostem prądu I zmniejsza przepływ, a zatem zwiększa prędkość silnika. Oba te czynniki działają w związku z obrotami maszyny, a rodzaj charakterystyki prędkości zależy od ich efektu netto.
Na rys. 2 pokazuje trzy różne charakterystyki prędkości obrotowej silnika (krzywe 1, 2, 3). Krzywa 1 - charakterystyka prędkości z przewagą wpływu I a ,r, krzywa 2 - oba czynniki są w przybliżeniu zrównoważone, krzywa 3 - przeważa współczynnik odmagnesowania reakcji twornika.

Ryc. 2 - Równoległe charakterystyki silnika wzbudzenia
Z uwagi na to, że w rzeczywistych silnikach zmiana strumienia Φ jest nieznaczna, reakcja prędkości jest prawie prosta. W wielu nowoczesnych maszynach o równoległym wzbudzeniu kompensującym efekt odpowiedzi poprzecznej twornika, zainstalowane jest dodatkowe uzwojenie stabilizujące, które całkowicie lub częściowo kompensuje efekt reakcji twornika.
Normalną postacią charakterystyki prędkości, przy której zapewniona jest stabilna praca silnika, jest charakterystyka postaci krzywej 1.
Nachylenie charakterystyki jest określone przez wielkość rezystancji obwodu twornika withoutr bez uwzględnienia reakcji twornika. Gdy dodatkowa rezystancja w łańcuchu kotwicy nie jest uwzględniona, charakterystyka nazywana jest naturalną. Naturalna charakterystyka równoległego silnika wzbudzenia jest dość sztywna. Zwykle gdzie n o jest prędkością obrotową podczas pracy na biegu jałowym. Gdy dodatkowa rezystancja R rg jest uwzględniona w obwodzie twornika, nachylenie charakterystyki wzrasta, stają się "miękkie" i nazywane są sztucznymi lub reostatycznymi.
Charakterystyka momentu - jest zależnością M = f (Ia) z r in = const, U = U n i Σr = const. W stanie ustalonym silnika według
mamy M em = M 2 + M 0 = c m I a F. Jeśli podczas pracy maszyny przepływ F nie uległ zmianie, wówczas charakterystyka momentu byłaby bezpośrednia (charakterystyka 4, ryc. 2). W rzeczywistości strumień Φ ze spadkiem prądu Ia nieznacznie maleje z powodu efektu rozmagnesowania reakcji twornika, więc charakterystyka momentu obrotowego jest lekko pochylona w dół (krzywa 5). Charakterystyka przydatnego momentu znajduje się poniżej krzywej momentu elektromagnetycznego o wartość momentu jałowego (krzywa 6).
Charakterystyczna wydajność η = f (I a) jest usuwany przy U = U n, r in = const, Σr = const i ma typową postać dla silników elektrycznych (charakterystyka 7 na Rys. 2). Wydajność wzrasta gwałtownie wraz ze wzrostem obciążenia z biegu jałowego do 0,25 P n, osiąga swoją maksymalną wartość przy P = (0,5 ... 0,75) P n, a następnie do P = P n pozostaje prawie niezmieniona. Zwykle w silnikach o małej mocy η = 0,75 ... 0,85, aw silnikach o średniej i wysokiej mocy η = 0,85 ... 0,94.
Charakterystyka mechaniczna reprezentuje zależność n = f (M) przy U = U n, I in = const i Σr = const. Wyrażenie analityczne dla charakterystyk mechanicznych można uzyskać na podstawie równania siły elektromotorycznej silnika elektrycznego

Określanie prądu I i od wyrażenia M = C e I a F i podstawianie tej wartości prądu w powyższym wyrażeniu, otrzymujemy
![]()
Jeśli zignorujemy reakcję twornika i założymy, że strumień Φ nie zmienia się, wówczas charakterystyki mechaniczne silnika elektrycznego o wzbudzeniu równoległym mogą być przedstawiane jako linie proste (ryc. 3), których nachylenie zależy od rezystancji R pg zwory zawartej w obwodzie. Gdy R pr = 0, charakterystyka nazywana jest naturalną.
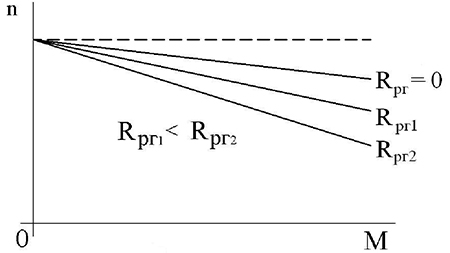
Ryc. 3 - Charakterystyka mechaniczna równoległego silnika wzbudzenia
Należy pamiętać, że gdy obwód wzbudzenia jest przerwany, I in = 0, prędkość obrotowa silnika n → ∞, tj. silnik "ściga się", więc musi być natychmiast odłączony od sieci.