Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования
применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
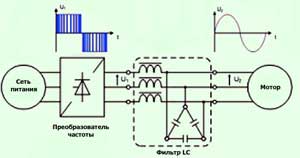
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов
также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов
также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2: 1 = р2: pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2: 1 = Рг: Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Существенным недостатком асинхронных электродвигателей является относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения асинхронных электродвигателей можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: n 2 = 60f 1 (1 ‑s )/p . Анализ формулы показывает, что частоту вращения асинхронного двигателя можно изменить, меняя скольжение ротораs , число пар полюсовр двигателя или частотуf 1 питающего напряжения.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или изменением активного сопротивления в цепи ротора.
Регулирование частоты вращения изменением активного сопротивления возможно только для асинхронных двигателей с фазным ротором, в обмотку которого (посредством контактных колец) включается добавочное регулировочное сопротивление по такой же схеме, как и при пуске двигателя. Однако пусковое сопротивление не годится для регулирования скорости, так как оно не рассчитано на длительную работу. Регулировочное сопротивление должно выдерживать токи, сравнимые с пусковыми, в течение длительного времени.
При увеличении активного сопротивления цепи ротора значение критического скольжения ротора двигателя s к в соответствии с приведенной ранее формулой увеличивается.
Включая различные добавочные сопротивления можно получить семейство механических характеристик двигателя, примерно таких, какие показаны на рис. 11, из которых следует, что с увеличением активного сопротивления в цепи ротора при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, увеличенному сопротивлению. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование при этом способе возможно в широком диапазоне скольжений, однако при уменьшении частоты нарушается жесткость механической характеристики и увеличиваются электрические потери.
Регулирование частоты вращения изменением питающего напряжения возможно за счет того, что критическое значение моментаМ к, а следовательно, величинаМ (s ) при любом скольжении пропорциональна квадрату питающего напряженияU 1 2 . Из приведенных на рис.12 кривых явно видно, что при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, уменьшенному напряжениюU 1 . Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование асинхронного двигателя при этом способе возможно только в незначительном диапазоне скольжений, который ограничивается критическими моментом и скольжением ротора.
Следует отметить, что при уменьшении напряжения происходит резкое снижение критического момента двигателя, пропорционально квадрату напряжения и, следовательно, резкое уменьшение перегрузочной способности двигателя по кратности критического момента, что ограничивает область применения описанного способа.
Ступенчатое регулирование частоты вращения асинхронных электродвигателей с короткозамкнутым ротором, как указывалось, возможно путемизменения числа пар полюсов за счет переключения секций его обмотки, что находит применение для многоскоростных двигателей. Сущность способа заключается в том, что при постоянной частоте напряжения питающей сети, частота вращения асинхронного двигателя зависит от числа пар полюсов обмотки статора. Таким образом, если на статоре асинхронного двигателя разместить две или более отдельных обмоток с разными числами пар полюсов, то при включении в сеть каждой из обмоток в отдельности, можно получать различные частоты вращения магнитного поля, а значит, и ротора. К сожалению, этот экономичный и сравнительно простой способ не позволяет плавно регулировать частоту вращения двигателя. Промышленностью освоен выпуск серий электродвигателей, частота вращения которых регулируется ступенями в 2, 3 и 4 раза без потерь мощности. Необходимо также отметить, что устройство многоскоростных электродвигателей значительно сложней, чем односкоростных, что ведет к их удорожанию.
Частоту вращения асинхронного двигателя можно регулировать также изменением частоты питающего тока , но этот способ для мощных двигателей практически не применяют ввиду отсутствия простых и экономичных устройств, регулирующих частоту тока в мощных цепях. В то же время, разработка и промышленное освоение мощных и дешевых управляемых полупроводниковых приборов (диоды, тиристоры) позволяет реализовывать простые и надежные преобразователи частоты и напряжения малой и средней мощности, с помощью которых можно легко регулировать частоту вращения асинхронных электродвигателей с короткозамкнутым ротором, что значительно упрощает привод различных механизмов, при этом часто отпадает необходимость в редукторах, коробках скоростей, трансмиссиях.
Страница 17 из 51
Асинхронные двигатели являются основой современного электропривода переменного тока. Эффективность работы этого электропривода во многом определяется возможностями регулирования частоты вращения.
Возможности асинхронных двигателей в отношении регулирования частоты вращения ротора определяются выражением
.
Из этого выражения следует, что частоту вращения можно регулировать тремя способами: путем изменения частоты , числа пар полюсов p
и скольжения s
. Рассмотрим каждый из этих способов подробнее.
Этот способ является в настоящее время наиболее перспективным. Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а
). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока. Из выражения, связывающего напряжение с потоком Ф,
,
следует, что напряжение необходимо регулировать пропорционально частоте
![]() .
.
Отклонение от этого закона приводит к изменению потока Ф
, что нежелательно. Действительно, при увеличении потока возрастает насыщение магнитной цепи, растут потери в стали и намагничивающий ток. Уменьшение потока вызывает уменьшение максимального момента двигателя и ряд других нежелательных явлений.
При ![]() механические характеристики двигателя имеют показанный на рис. 4.28, б
вид. При снижении частоты пусковой момент двигателя возрастает, а максимальный несколько снижается. Рабочее скольжение двигателя остается небольшим, что характеризует экономичный режим работы двигателя. Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
механические характеристики двигателя имеют показанный на рис. 4.28, б
вид. При снижении частоты пусковой момент двигателя возрастает, а максимальный несколько снижается. Рабочее скольжение двигателя остается небольшим, что характеризует экономичный режим работы двигателя. Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными
. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
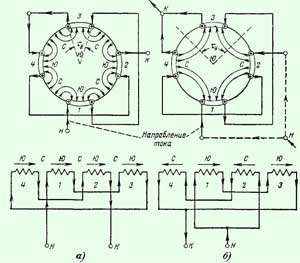
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет полюса. Мощность обмотки остается неизменной, ![]() , а момент, развиваемый двигателем, снижается в два раза,
, а момент, развиваемый двигателем, снижается в два раза, ![]() . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки
. В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки ![]() возрастает в два раза, а момент двигателя остается постоянным
возрастает в два раза, а момент двигателя остается постоянным ![]() .
.
 |
Таким образом, для изменения числа пар полюсов в отношении необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом . Тогда при меньшем числе полюсов .
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом и с постоянной мощностью . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя , момент же при этом не меняется.
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,
.
Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения
.
Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения
.
 |
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34).
Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным. Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой.
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными
. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор.
Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя. Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной. В этом случае направление передачи мощности скольжения меняется на противоположное.









