Асинхронная машина - это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин - индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Асинхронный двигатель с высокоомным ротором. Асинхронный двигатель с намоточным ротором. Мотор с двойной белой клеткой. Соединение звезда - треугольник.
Достоинства:Лёгкость в изготовлении.Отсутствие механического контакта со статической частью машины.
Недостатки:Небольшой пусковой момент.Значительный пусковой ток.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части - конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Генерация вращающегося поля. Магнитное поле асинхронного двигателя также является вращающимся полем. В случае трехфазного двигателя генерируются тремя внефазных токами, которые циркулируют через обмотку статора. Для генерируемого вращательного поля обмотки должны быть равномерно распределены по периферии статора, как в случае трехфазных токов. Поэтому в биполярных машинах угол между соответствующими катушками каждой фазы должен составлять 120 °. Токи 3 статора места затем в 3 чередующихся поля, также 120 ° не в фазе друг с другом, результатом чего является вращающееся магнитное поле.
Обмотка статора представляет собой трёхфазную (в общем случае - многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
Направление этого поля в данный момент может быть представлено стрелкой. Чувство токов и направление вращающегося поля в биполярной машине, которая для простоты предполагалась снабженной только 6 слотами. Время, соответствующее каждой позиции, можно вывести из угла, повернутого полем. Переключение двух терминалов сети инвертирует направление вращения поля. Затем ротор перемещается против часовой стрелки.
Он состоит из корпуса, в котором закреплена крона из листов стали особого качества, снабженная слотами. Обмотки распределены в этих слотах и образуют набор обмоток, содержащих столько схем, сколько фаз сети питания. Работа ротора. Он - движущаяся часть двигателя. Он расположен внутри статора и состоит из соединения стальных листов, которые образуют цилиндр, встроенный в вал двигателя.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора - из пластин электротехнической стали.
Принцип действия
Ротор трехфазного двигателя проходит через вращающееся поле, генерируемое в статоре. Обмотка ротора может выполняться как статор в распределенной форме, причем катушки соединены последовательно; или также на основе баров. Эти стержни из литого под давлением алюминия соединены параллельно и в то же время закорочены с помощью двух торцевых колец. Эти кольца часто сливаются вместе с алюминиевым сплавом, который заполняет канавки ротора.
В обоих случаях обмотка ротора замыкается, когда двигатель работает. Совместное действие вращающегося поля и поля из-за тока ротора определяет, как и во всех двигателях, крутящий момент. Этот момент затягивает ротор в направлении вращения вращающегося поля и передает скорость, очень близкую к синхронизму. Как в покое, так и при начальном времени запуска трехфазный двигатель работает так же, как и обычный трансформатор, и генерирует в роторе напряжение остаточного ротора, величина которого также зависит от соотношения между номерами оборотов.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создает вращающий электромагнитный момент, заставляющий ротор вращаться.
В двигателях с намоточным ротором это напряжение можно измерить в кольцах скольжения. Его значение обычно указывается на паспортной табличке. При работающем двигателе эффективное напряжение ротора, таким образом, равно только разнице между двумя предыдущими.
Если ротор должен вращаться со скоростью синхронности, очевидно, что оба напряжения будут равны, благодаря чему эффективное напряжение ротора будет равным нулю. В этом случае ток не течет через ротор, и крутящий момент исчезнет. Поэтому трехфазный двигатель всегда отстает от скорости синхронизма: он, как говорят, проскальзывает. Разница между последней и фактической скоростью двигателя составляет относительную скорость двигателя относительно поля. Он получает имя проскальзывания частного для деления относительной скорости на синхронизм; обычно выражается в процентах.
Наибольшее распространение среди электрических двигателей Получил трехфазный асинхронный двигатель, впервые сконструированный известным русским электриком М. О. Доливо-Добровольским.
Асинхронный двигатель отличается простотой конструкции Щ несложностью обслуживания. Как и любая машина переменного тока асинхронный двигатель состоит из двух основных частей; статора и ротора. Статором называется неподвижная часть машины, ротором - ее вращающаяся часть. Асинхронная машина обладает свойством обратимости, т. е. может быть использована как в режиме генератора, так и в режиме двигателя. Из-за ряда существенных недостатков асинхронные генераторы практически почти не применяются, тогда как асинхронные двигатели, как это было отмечено выше, получили очень широкое распространение.
Поэтому трехфазный двигатель по существу асинхронен. По мере увеличения нагрузки, а вместе с ней и тока ротора число оборотов уменьшается. Полноприводное скольжение обычных трехфазных двигателей составляет около 5% для малой мощности и 2-3% для более старых двигателей. Сервисная характеристика трехфазного двигателя аналогична характеристике двигателя байпаса с непрерывным током. Посредством интеркалирующих сопротивлений в контуре ротора можно добиться более выраженной понижающей характеристики для целей регулирования скорости, но затем более высокие потери и производительность двигателя снижаются.
Поэтому мы будем рассматривать работу асинхронной машины в режиме двигателя, т. е. процесс преобразования электрической энергии в энергию механическую.
Многофазная обмотка переменного тока создает вращающееся магнитное поле, скорость вращения которого в минуту
Если ротор вращается со скоростью п2, равной скорости вращения магнитного поля (n2=n1), то такая скорость называется синхронной.
На скорости вращающегося магнитного поля называется скоростью синхронизации и равна. Когда линии магнитного поля разрезают стержни ротора, в них создается электродвижущая сила, которая приводит к возникновению токов, которые циркулируют в противоположных направлениях, то есть эти токи производятся в отдельных нитях на 180º. Эти провода подвергаются воздействию сил, которые стремятся перемещать их в направлении, перпендикулярном магнитному полю, и тем самым создают так называемый крутящий момент.
Значение крутящего момента двигателя определяется. Ð = Магнитный поток вращающегося поля. Скорость вращения ротора должна быть меньше скорости магнитного потока, поскольку, если бы они имели одинаковую скорость, полосы ротора не отрезали бы от линий потока, и поэтому эмиссия не генерировалась бы, ток в роторе будет равен нулю.
Если ротор вращается со скоростью, не равной скорости вращения магнитного поля { n2n1), то такая скорость называется асинхронной.
В асинхронном двигателе рабочий процесс может протекать только при асинхронной скорости, т. е. при скорости вращения ротора, не равной скорости вращения магнитного поля.
Скорость
ротора может очень мало отличаться от
скорости юля, но при работе двигателя
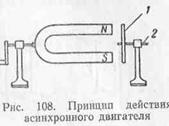
она будет всегда меньше (n2 Из-за сопротивления воздуху и трению ротор не достигает той же скорости, что и поток. И это различие называется проскальзыванием. Мы имеем, что интенсивность в роторе будет определяться следующим выражением. Если мы заменим уравнения 1 и 1 в уравнении 2, мы получим крутящий момент двигателя в зависимости от проскальзывания. Интенсивность и крутящий момент прямо пропорциональны проскальзыванию как под вакуумом, так и при полной нагрузке. На рисунке 13 показана зависимость между изменением крутящего момента и током ротора со скоростью асинхронного двигателя с короткозамкнутым ротором и низким импедансом. Мы можем заметить, что в покое двигатель поглощает примерно шесть с половиной раз ток при полной нагрузке, при этом крутящий момент в полтора раза превышает крутящий момент при полной нагрузке. Работа
асинхронного двигателя основана на
явлении, названии диск Араго-Ленца (рис.
108). Это явление заключается в следующем:
если перед полюсами постоянного магнита
поместить медный диск 1, свободно сидящий
на оси 2, и начать вращать магнит круг
его оси при помощи рукоятки, то медный
диск будет вращаться в том же направлении.
Это объясняется тем, что при вращении
магнита магнитные линии его поля,
замыкаясь от северного полюса с южному,
пронизывают диск и индуктируют в нем
вихревые токи, 3 результате взаимодействия
вихревых токов с магнитным полем магнита
возникает сила, приводящая диск во
вращение. На основании закона Ленца
направление всякого индуктированного
тока таково, что он противодействует
причине, его вызвавшей. Поэтому вихревые
токи в теле диска стремятся задержать
вращение магнита, но, не имея возможности
сделать это, приводят диск во вращение
так, что он следует за магнитом. При этом
скорость вращения диска всегда меньше,
чем скорость вращения магнита. Если бы
эти скорости почему-либо стали одинаковыми,
то магнитные лиши не пересекали бы диска
и, следовательно, в нем не возникали 5ы
вихревые токи, т. е. не было бы силы, под
действием которой диск вращается. Если сопротивление ротора увеличено до трех раз, пусковой момент можно удвоить, практически уменьшив ток на 25%. В этом случае ротор считается высокопрочным. Это гарантирует, что характеристики запуска двигателя хороши, так что его основное использование в приложениях, которые связаны с последовательными пусками и остановками. Если необходимо совместить хороший пусковой момент двигателя с высокопрочным ротором с высокими рабочими характеристиками двигателя с низкоомным ротором, необходимо изменить сопротивление ротора. Это достигается за счет использования трехфазной обмотки в роторе вместо белой клетки. В
асинхронных двигателях постоянный
магнит заменен вращаюйся магнитным
полем, создаваемым трехфазной обмоткой
статора при включении ее в сеть переменного
тока. Вращающееся
магнитное поле статора пересекает
проводники обмотки ротора и индуктирует
в них э.д. с. Если обмотка ротора замкнута
на какое-либо сопротивление или накоротко,
то по ней Во время запуска все сопротивление находится в цепи, постепенно подавляется до нуля, когда двигатель получает скорость. Поскольку двигатель с короткозамкнутым ротором имеет постоянную скорость, если необходимо изменить скорость, необходимо использовать этот тип двигателя, который позволяет использовать широкий диапазон скоростей от нуля до примерно 95%. Другая процедура, позволяющая при росте и росте при росте высокого ротора иметь низкий ротор, - это двигатель ротора, намотанный двойной клеткой с белкой. Крупные стержни расположены внутри ротора, его реактивное сопротивление очень велико на частоте сети и очень мало циркулирует к остановленному ротору. под
действием индуктируемой э. д. с. протекает
ток. В результате полем обмотки статора
создается вращающий момент, под действием
которого ротор начинает вращаться. Например,
выделим часть окружности ротора, на
которой находится один проводник его
обмотки. Поле статора представим северным
полюсом N, который вращается в пространстве
и вокруг ротора по часовой стрелке с
числом оборотов N в минуту. Следовательно,
полюс N перемещается относительно
проводника обмотки ротора слева направо,
в результате чего в этом проводнике
индуктируется э.д. с, которая согласно
правилу правой руки направлена на
зрителя (знак «точка»). Если обмотка
ротора замкнута, то под действием э. д.
с. по этой обмотке течет ток, направленный
в выбранном нами проводнике также на
зрителя. Напротив, тонкие стержни поверхности ротора имеют небольшие реактивные сопротивления, но высокие сопротивления. Таким образом, только высокопрочные стержни ротора, выступающие в роли высокопрочного ротора, транспортируются только при запуске. И наоборот, когда двигатель достигает скорости, реактивное сопротивление в толстых стержнях уменьшается по мере того, как общий ток ротора увеличивается до тех пор, пока скорость не станет практически равной току, протекающему через тонкие стержни, в то время как сопротивление невелико в момент работы. В
результате взаимодействия тока в
проводнике обмотки ротора с магнитным
полем возникает сила F, которая перемещает
проводник в направлении, определяемом
по правилу левой руки, т. е. слева направо.
Вместе с проводником начинает перемещаться
и ротор. Если
силу F, действующую на проводник обмотки
ротора, умножить на расстояние этого
проводника от оси ротора (плечо приложения
силы), то получим вращающий момент,
развиваемый током данного проводника.
Так как на роторе помещено большое
количество проводников, то сумма
произведений сил, действующих на каждый
из проводников, на расстояния этих
проводников от оси ротора определяет
вращающий момент, развиваемый двигателем.
Под действием вращающего момента ротор
приходит во вращение по направлению
вращения магнитного поля. Следовательно,
для реверсирования двигателя, т. е. для
изменения направления вращения ротора,
необходимо изменить направление вращения
магнитного поля, созданного обмоткой
статора. Это достигается изменением
чередования фаз обмоток статора; для
чего следует поменять местами по
отношению к зажимам сети любые два из
трех проводов, соединяющих обмотку
статора с сетью. Реверсивные двигатели
снабжаются переключателями, при помощи
которых можно изменять чередование фаз
обмоток статора, а следовательно, и
направление вращения ротора. Учитывая, что выходная мощность статора равна входной мощности в роторе, мы должны. Потребляемая мощность = поглощенная мощность - потеря. Если умножить числитель и знаменатель на предыдущее снижение на количество фаз, которые вы получаете. Прилагаемый рисунок представляет рабочие характеристики двигателя индукционного движения, в котором наблюдается, как коэффициент мощности увеличивается с нагрузкой двигателя. Запуск трехфазного двигателя. Если трехфазный двигатель подключен непосредственно к сети, без какого-либо сопротивления, вводимого в цепь ротора, запускается ток запуска, который практически коротко замыкается. В обычных двигателях с каркасом ротора он находится в 5-8 раз номинальном токе. Вставляя сопротивления в обмотку ротора, пусковой ток может быть уменьшен до желаемого значения. Это достигается в двигателях с раневым ротором, при этом контактные кольца соприкасаются со стартером. Несмотря на высокий пусковой ток, поглощаемый нормальным ротором сепаратора, начальный крутящий момент, создаваемый клеткой, очень низок, так как в это время коэффициент мощности ротора также очень мал. Вне
зависимости от направления вращения
ротора его скорость n2, как уже указывалось,
всегда меньше скорости магнитного поля
статора. Если
предположить, что в какой-то момент
времени число оборотов ротора оказалось
равным числу оборотов поля статора, то
проводники обмотки ротора не будут
пересекаться магнитными линиями поля
статора и тока в роторе не будет. В этом
случае вращающий момент станет равным
нулю, скорость вращения ротора уменьшится
по сравнению со скоростью вращения поля
статора, пока не воз никнет вращающий
момент, уравновешивающий тормозной
момент который складывается из момент;
нагрузки на валу и момента сил трения
в машине. При обмотке роторов начальный коэффициент мощности может быть значительно улучшен благодаря стартеру, благодаря чему достигается более высокий пусковой момент. Когда пусковой ток не должен превышать умеренное значение, двигатели ротора сепаратора запускаются с помощью соединения звезда-треугольник. Для этого необходимо, чтобы обмотка статора была рассчитана так, чтобы обычное служебное соединение было соединением в треугольнике. Если, например, предположим, что в последнем случае ток запуска в 6 раз превышает номинальное значение, то звездное соединение уменьшает этот коэффициент до. Следует, однако, иметь в виду, что пусковой момент также уменьшается в той же пропорции. Следовательно, возможно только запуск в вакууме или при средней нагрузке, что является достаточным условием в большинстве случаев. Поскольку звезда-дельта-стартер, благодаря своим многочисленным контактам, требует периодических развлечений, позаботится о том, чтобы отказаться от него в тех учреждениях, где такой помощи не существует. Асинхронная машина
- это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. Достоинства: Недостатки: Индукционный мотор был впервые реализован Галилео Феррарисом в 1885 г. в Италии. В 1888 г. Феррарис опубликовал свои исследования в статье в Королевскую Академию Наук в Турине (позже, в том же году, Тесла получил U.S. Patent 381,968, в котором он опубликовал теоретические основы для понимания каким путём действует мотор). Индукционный мотор с короткозамкнутым ротором был предложен Доливо-Добровольским примерно годом позже . Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод; все остальные части - конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п. Обмотка статора представляет собой трёхфазную (в общем случае - многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения (вращения) магнитного потока обмотки возбуждения, поэтому его изготавливают шихтованным (набранным из пластин) из электротехнической стали для обеспечения минимальных магнитных потерь. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым
ротором и с фазным
ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора - из электротехнической стали и шихтованным. Ротор асинхронной машины типа «беличья клетка» Короткозамкнутая обмотка ротора, часто называемая «беличья клетка» из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. В машинах малой и средней мощности ротор обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями «беличьей клетки» отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию самого ротора и вентиляцию машины в целом. В машинах большой мощности «беличью клетку» выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца. Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС, вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами. Для улучшения пусковых характеристик асинхронного электродвигателя с короткозамкнутым ротором, а именно, увеличения пускового момента и уменьшения пускового тока, на роторе применяют специальную форму паза. При этом внешняя от оси вращения часть паза ротора имеет меньшее сечение чем внутренняя. Это позволяет использовать эффект вытеснения тока, за счет которого увеличивается активное сопротивление обмотки ротора при больших скольжениях (при пуске). Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент и значительный пусковой ток, что является существенным недостатком «беличьей клетки». Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Из достоинств следует отметить лёгкость в изготовлении, и отсутствие механического контакта со статической частью машины, что гарантирует долговечность и снижает затраты на обслуживание. При специальной конструкции ротора, когда магнитопровод "ротора" остается неподвижным, а вращается в магнитном зазоре только полый цилиндр из алюминия (беличья клетка или короткозамкнутая обмотка ротора) можно достичь малой инерционности двигателя. Фазный ротор имеет трехфазную (в общем случае - многофазную) обмотку, обычно соединённую по схеме «звезда» и выведенную на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора: Трёхфазный коллекторный асинхронный двигатель с питанием со стороны ротора
. Асинхронный двигатель, позволяющий плавно регулировать скорость от минимальной до двойной синхронной. Конструкционно двигатель представляет собой машину с фазным ротором, на который подаётся питание. Кроме того, питание обмотки статора осуществляется через щёточно-коллекторный узел, который представляет собой один коллектор и два комплекта щёток, вращающихся друг относительно друга. Изменяя положения щёток, добиваются разных скоростей вращения. Наибольшее развитие такие двигатели получили в 30-е годы XX века. На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону магнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая, складываясь по окружности, создает вращающийся электромагнитный момент ротора. При питании обмотки статора трёхфазным (в общем случае - многофазным) током создаётся вращающееся магнитное поле, синхронная частота вращения [об/мин] которого связана с частотой сети [Гц] соотношением: где - число пар магнитных полюсов обмотки статора. В зависимости от количества числа пар полюсов могут быть следующие значения частот вращения магнитного поля статора, при частоте питающего напряжения 50 Гц: Большинство двигателей имеют 1-3 пары полюсов, реже 4. Большее число полюсов используется очень редко, такие машины имеют низкий КПД и коэффициент мощности. Механическая характеристика асинхронной машины: а - режим рекуперации энергии в сеть (генераторный режим), б - двигательный режим, в - режим противовключения (режим электромагнитного тормоза). Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке ротора возникает ток. На проводники с током этой обмотки, расположенные в магнитном поле обмотки возбуждения, действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор за магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение, и его установившаяся частота вращения [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т.д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать крутящий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство: Относительная разность частот вращения магнитного поля и ротора называется скольжением
: Очевидно, что при двигательном режиме . Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим
. При этом изменит направление и электромагнитный момент, который станет тормозящим. В генераторном режиме работы скольжение . Для работы АД в генераторном режиме требуется источник реактивной мощности, создающий поток возбуждения. При отсутствии первоначального магнитного поля в обмотке статора поток возбуждения создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора. Асинхронный генератор потребляет намагничивающий ток значительной силы и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов, батарей статических конденсаторов (БСК). Несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном как вспомогательный источник небольшой мощности и как тормозное устройство (например, двигатель лифта или эскалатора метрополитена, идущего вниз, работает в генераторном режиме, отдавая энергию в сеть). в этом режиме происходит испытание эл. машины, когда на валу отсутствует редуктор и исполнительный орган. В этом режиме могут быть исследованы потери передачи энергии статора к ротору и на этом этапе улучшаются конструктивные особенности отдельных узлов, т.к. n2 = n1, следовательно S=0. При номинальной нагрузке S=0.01 - 0.08 Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства: Этот режим применяют кратковременно, так как при нём выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя. Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента. Существуют следующие способы управления асинхронным двигателем:Устройство асинхронной машины
План:
Введение
Введение
В ряде стран к асинхронным машинам причисляют также коллекторные машины. В России асинхронными машинами стали называть машины, которые являются индукционными
.
Асинхронные машины сегодня составляют большую часть электрических машин. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую. 1. История
2. Конструкция
2.1. Короткозамкнутый ротор
2.2. Фазный ротор
2.3. Двигатель Шраге-Рихтера
3. Принцип действия
4. Скорость вращения поля статора
n, об/мин
p
3000
1
1500
2
1000
3
300
10
5. Режимы работы
5.1. Двигательный режим
5.2. Генераторный режим
5.3. Режим холостого хода
5.4. Режим электромагнитного тормоза
6. Способы управления асинхронным двигателем
Примечания
Текст доступен по лицензии Creative Commons Attribution-ShareAlike .









