
![]()
Графически выраженная зависимость электромагнитного момента от скольжения называется механической характеристикой асинхронного двигателя (рис. 3.3).
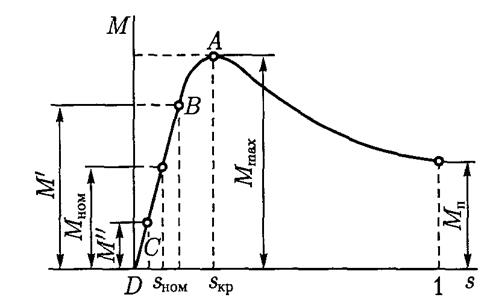
Рис. 3.3. Механическая характеристика асинхронного двигателя
Упрощенная формула для расчета электромагнитного момента асинхронного двигателя (формула Клосса) может быть использована для построения механической характеристики
При этом критическое скольжение определяют по формуле
![]()
где λ м = М max /М ном - перегрузочная способность двигателя.
При расчете механической характеристики следует иметь в виду, что при значениях скольжения, превышающих критическое, точность расчетов резко снижается. Это объясняется изменением параметров схемы замещения асинхронного двигателя, вызванного магнитным насыщением зубцов статора и ротора, и увеличением частоты тока в обмотке ротора.
Форма механических характеристик асинхронного двигателя в значительной степени зависит от величин подведенного к обмотке статора напряжения U 1 (рис. 3.4) и активного сопротивления обмотки ротора r " 2 (рис. 3.5).
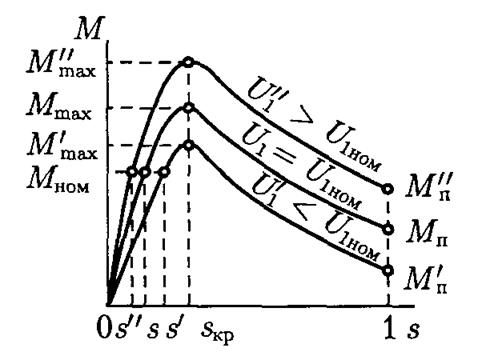
Рис. 3.4. Влияние напряжения U 1 на механические характеристики асинхронного двигателя
Приводимые в каталогах на асинхронные двигатели данные обычно не содержат сведений о параметрах схемы замещения, что затрудняет применение формул для расчета электромагнитного момента. Поэтому для расчета электромагнитного момента часто применяют формулу
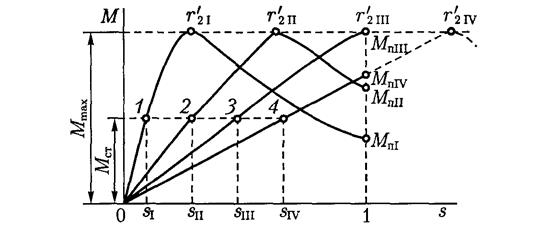
Рис. 3.5. Влияние сопротивления r" 2 на механические характеристики асинхронного двигателя
Эксплуатационные свойства асинхронного двигателя определяются его рабочими характеристиками: зависимостью частоты вращения n 2 ,моментом на валу М 2 ,КПД и коэффициентом мощности cos φ 1 от полезной нагрузки двигателя Р 2 .
При расчете параметров для определения рабочих характеристик асинхронных двигателей используют либо графический метод, в основе которого лежит построение круговой диаграммы, либо аналитический метод.
Основанием для выполнения любого из методов расчета рабочих характеристик служат результаты опытов холостого хода и короткого замыкания. Если же двигатель проектируется, то эти данные получают в процессе его расчета.
При расчете сопротивлений резисторов r доб, применяемых в цепях статора или фазного ротора для ограничения пускового тока или регулирования частоты вращения, используют принцип: для данного конкретного асинхронного двигателя скольжение s пропорционально активному сопротивлению цепи ротора этого двигателя. В соответствии с этим справедливо равенство
(r 2 + r доб)/s = r 2 /s ном,
где r 2 - активное сопротивление собственно обмотки ротора при рабочей температуре; s - скольжение при введенном в цепь ротора резистора сопротивлением r доб.
Из этого выражения получим формулу для расчета активного сопротивления добавочного резистора г до6 , необходимого для получения заданного повышенного скольжения s при заданной (номинальной) нагрузке:
r доб = r 2 (s/s ном - 1).
Существует два метода расчета пусковых реостатов: графический и аналитический.
Графический метод более точен, но требует построения естественной механической характеристики и пусковой диаграммы двигателя, что связано с выполнением большого объема графических работ.
Аналитический метод расчета пусковых реостатов более прост, но менее точен. Это обусловлено тем, что в основе метода лежит допущение о прямолинейности рабочего участка естественной механической характеристики асинхронного двигателя. Но при скольжении близком к критическому это допущение вызывает заметную ошибку, которая тем значительнее, чем ближе начальный пусковой момент М 1 к максимальному моменту М m ах. Поэтому аналитический метод расчета применим лишь при значениях начального пускового момента М 1 < 0,7·М m ах .
Сопротивления резисторов на ступенях пускового реостата:
третьей r доб3 = r 2 (λ м - 1);
второй r доб2 = r доб3 λ м;
первой r доб1 = r доб2 λ м,
где r 2 - активное сопротивление фазной обмотки ротора асинхронного двигателя,
где Е 2 и I 2ном - данные каталога на выбранный типоразмер двигателя.
Сопротивления пускового реостата на его ступенях:
первой R ПР1 = r доб1 + r доб2 + r доб3 ;
второй R ПР2 = r доб2 + r доб3
третьей R ПР2 = r доб3 .
Для ограничения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют специальные схемы их включения с элементами, ограничивающими пусковой ток. Все эти методы основаны на снижении подводимого к обмотке статора напряжения. Наибольшее применение получили схемы с включением в линейные провода статора резисторов или дросселей (см. рис. 3.14,б ).Расчет требуемого сопротивления этих элементов при заданном снижении пускового тока а, относительно его естественного значения ведется по формулам:
для резисторов с активным сопротивлением
R
п = 
для дросселей
х
L = 
Полное сопротивление двигателя в режиме короткого замыкания Z к,Ом,
Z k =U 1 /I п
Здесь х к и r k - индуктивная и активная составляющие этого сопротивления
R k = Z k cosφ k ; x k =
Уменьшение искусственного пускового момента при включении R или L составит
α м = α 2 i
Таблица 3.1
Таким образом, если задано значение α м, определяющее величину искусственного пускового момента М" п, то для расчета соответствующих значений R п или x L можно воспользоваться приведенными выше формулами, подставив в них вместо α 2 i , величину α м.
Электрическое сопротивление обмоток двигателей, приведенных в каталогах, обычно соответствуют температуре +20 °С. Но при расчетах характеристик и параметров двигателей сопротивления их обмоток необходимо приводить к рабочей температуре. В соответствии с действующим стандартом величина рабочей температуры принимается в зависимости от класса нагревостойкости электрической изоляции, примененной в двигателе: при классе нагревостойкости В рабочая температура равна 75 °С, а при классах нагревостойкости F и Н - 115 °С. Пересчет сопротивлений обмоток на рабочую температуру выполняется путем умножения сопротивления обмотки при температуре 20 °С, на коэффициент нагрева k t :
r = r 20 k t .
Значения этого коэффициента принимают в зависимости от назначения двигателей и их габаритов (высоты оси вращения) (табл. 3.1).
СИНХРОННЫЕ МАШИНЫ
ОСНОВНЫЕ ПОНЯТИЯ
Характерным признаком синхронных машин является жесткая связь между частотой вращения ротора n 1 и частотой переменного тока в обмотке статора f 1:
n 1 = f 1 · 60/р .
Другими словами, вращающееся магнитное поле статора и ротор синхронной машины вращаются синхронно, т. е. с одинаковой частотой.
По своей конструкции синхронные машины разделяются на явнополюсные и неявнополюсные. В явнополюсных синхронных машинах ротор имеет явно выраженные полюса, на которых располагают катушки обмотки возбуждения, питаемые постоянным током. Характерным признаком таких машин является различие магнитного сопротивления по продольной оси (по оси полюсов) и по поперечной оси (по оси, проходящей в межполюсном пространстве). Магнитное сопротивление потоку статора по продольной оси dd намного меньше магнитного сопротивления потоку статора по поперечной оси qq. В неявнополюсных синхронных машинах магнитные сопротивления по продольной и поперечной осям одинаковы, поскольку воздушный зазор у этих машин по периметру статора одинаков.
Конструкция статора синхронной машины в принципе не отличается от статора асинхронной машины. В обмотке статора в процессе работы машины индуцируются ЭДС и протекают токи, которые создают магнитодвижущую силу (МДС), максимальное значение которой
F 1 =0,45m 1 I 1 w 1 k об1 /р
Эта МДС создает вращающееся магнитное поле, а в воздушном зазоре δ машины создается магнитная индукция, график распределения которой в пределах каждого полюсного деления т зависит от конструкции ротора (рис. 4.1).
Для явнополюсной синхронной машины справедливо уравнение напряжений:
Ú 1 =Ė 0 + Ė 1 d + Ė 1 q + Ė σ1 –İ 1 r 1
где Ė 0 - основная ЭДС синхронной машины, пропорциональная основному магнитному потоку синхронной машины Ф 0 ; Ė 1 d - ЭДС реакции якоря синхронной машины по продольной оси, пропорциональная МДС реакции якоря по продольной оси F 1 d ;Ė σ1 - ЭДС реакции якоря по поперечной оси, пропорциональная МДС реакции якоря по поперечной оси F 1 q ;Ė σ1 - ЭДС рассеяния, обусловленная наличием магнитного потока рассеяния Ф 0 , величина этой ЭДС пропорциональна индуктивному сопротивлению рассеяния обмотки статора х 1
Ė σ1 = j İ 1 r
İ 1 r 1 - активное падение напряжения в фазной обмотке статора, обычно этой величиной при решении задач пренебрегают ввиду ее небольшого значения.
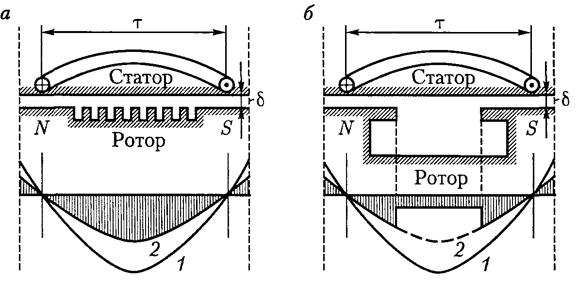
Рис. 4.1. Графики распределения магнитной индукции по поперечной оси
неявнополюсной (а )и явнополюсной (б )синхронных машин:
1 - график МДС; 2 - график магнитной индукции
Для неявнополюсной синхронной машины уравнение напряжений имеет вид
Ú 1 =Ė 0 + Ė c –İ 1 r 1
Здесь
Ė c = Ė 1 + Ė σ1
где Ė 1 - ЭДС реакции якоря неявнополюсной синхронной машины. Рассмотренным уравнениям напряжений соответствуют векторные диаграммы напряжений. Эти диаграммы приходится строить для определения либо основной ЭДС машины Е 0 ,либо напряжения обмотки статора U 1 .Следует иметь в виду, что уравнения напряжений и соответствующие им векторные диаграммы не учитывают магнитного насыщения магнитопровода синхронной машины, которое, как известно, влияет на величину индуктивных сопротивлений, вызывая их уменьшение. Учет этого насыщения представляет сложную задачу, поэтому при расчетах ЭДС и напряжений синхронных машин обычно пользуются практической диаграммой ЭДС, которая учитывает состояние насыщения магнитной системы, вызванное действием реакции якоря при нагрузке синхронной машины. При построении практической диаграммы ЭДС намагничивающую силу реакции якоря не разлагают на продольную и поперечную составляющие, поэтому эта диаграмма может быть применена как при расчетах явнополюсных, так и неявнополюсных машин.
При решении задач, связанных либо с синхронными генераторами, включенными параллельно с сетью, либо с синхронными двигателями, пользуются угловыми характеристиками синхронных машин, представляющими собой зависимость электромагнитного момента М от угла нагрузки θ. При этом следует помнить, что в явнополюсных синхронных машинах действуют два момента: основной М осн и реактивный М р,а в неявнополюсных машинах - только основной момент:
![]()
Угол нагрузки θ ном соответствует номинальному моменту М ном. Максимальный момент синхронной машины определяет перегрузочную способность синхронной машины, что имеет важное значение как для синхронных генераторов, работающих параллельно с сетью, так и для синхронных двигателей. В неявнополюсных синхронных машинах максимальный момент соответствует углу нагрузки θ = 90°, в явнополюсных машинах θ кр < 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
Для расчета критического угла нагрузки, определяющего перегрузочную способность явнополюсных синхронных машин, можно воспользоваться выражением.
На величину вращающего момента асинхронного двигателя большое влияние оказывает сдвиг фаз между током I 2 и э. д. с. E 2S ротора.
Рассмотрим случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз можно пренебречь (фиг. 223, а).
Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающихся, предположим, по направлению часовой стрелки. Пользуясь правилом правой руки, определяем направление э. д. с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу левой руки. Как видно из чертежа, ротор под действием сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора велика. В этом случае сдвиг фаз между током ротора I 2 и э. д. с. ротора Е 2S будет также большим. На фиг. 223, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э. д. с. остается таким же, как и на фиг. 223, а, но вследствие запаздывания тока по фазе ось магнитного поля ротора не будет уже совпадать с нейтральной линией поля статора, а сместится на некоторый угол против вращения магнитного поля. Это приведет к тому, что наряду с образованием вращающего момента, направленного в одну сторону, некоторые проводники создадут встречный вращающий момент.
Отсюда видно, что общий вращающий момент двигателя при сдвиге фаз между током и э. д. с. ротора меньше, чем для случая, когда I 2 и Е 2S совпадают по фазе. Можно доказать, что вращающий момент асинхронного двигателя обусловливается только активной слагающей тока ротора, т. е. током I 2 cos и что он может быть вычислен по формуле:
Ф m -магнитный поток статора (а также приближенно равный результирующему магнитному потоку асинхронного двигателя);
Угол сдвига фаз между э. д. с. и током фазы обмотки
С - постоянный коэффициент.
После подстановки:
Из последнего выражения видно, что вращающий момент асинхронного двигателя зависит от скольжения.
На фиг. 224 изображена кривая А зависимости вращающего момента двигателя от скольжения. Из кривой видно, что в момент пуска, когда s=l и n = 0, вращающий момент двигателя невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos имеет малое значение (по-
|
рядка 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет небольшим.
При некотором скольжении S 1 вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения или, иначе говоря, при даль, нейшем увеличении скорости вращения двигателя его момент будет быстро умень-
Шаться и при скольжении s = 0 момент вращения двигателя бу- дет также равен нулю.
Следует оговориться, что у асинхронного двигателя скольжение, равное нулю, практически быть не может. Это возможно лишь в том случае, если ротору сообщить извне вращающий момент в сторону вращения поля статора.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э. д. с. ротора. Из формулы
видно, что если при постоянном индуктивном сопротивлении обмотки ротора увеличить активное сопротивление, то и сам угол будут уменьшаться, что приведет к тому, что и вращающий момент двигателя станут больше. Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят, как только двигатель увеличит скорость.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой B на фиг. 224). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (s = 1 кривой С).
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сопровождается резким уменьшением вращающего момента.
Мощность P 1 , подводимая к обмотке статора асинхронного двигателя, равна:
![]()
где m 1 - число фаз.
В статоре двигателя имеются следующие потери энергии:
1) в обмотке статора Р эс. =m 1 I 1 2 r 1 ;
2) в стали статора иа гистерезис и вихревые токи Р C .
Мощность, подводимая к ротору, представляет собой мощность вращающегося магнитного поля, называемую также электромагнитной мощностью Р эM .
Электромагнитная мощность равна разности между подводимой к двигателю мощностью и потерями в статоре двигателя, т. е.
|
Разность между Р эM и представляет собой электрические потери в обмотке ротора Р эP , если пренебречь потерями в стали ротора в виду их незначительности (частота перемагничивания ротора обычно очень мала):

Следовательно, потери в обмотке ротора пропорциональны скольжению ротора.
Если из механической мощности развиваемой ротором, вычесть механические потерн Р мх обусловленные трением в подшипниках ротора, трением о воздух и т. п., а также добавочные потери Р Д, возникающие при нагрузке и обусловленные полями рассеяния ротора, и потери, вызываемы: пульсациями магнитного поля в зубцах статора и ротора, то останется полезная мощность на валу двигателя, которую обозначим через P 2 .
К. п. д. асинхронного двигателя может быть определен по формуле:

Из последнего выражения видно, что момент вращения асинхронного двигателя пропорционален произведению из величины вращающегося магнитного потока, тока ротора и косинуса угла между э. д. с. ротора и его током,

Из схемы замещения асинхронного двигателя получается величина приведенного тока ротора, которую мы приводим без доказательства.
Момент, развиваемый двигателем равен электромагнитной мощности, деленной на синхронную скорость вращения электропривода.
M = P эм /ω 0
Электромагнитная мощность – это мощность, передаваемая через воздушный зазор от статора к ротору, и она равна потерям в роторе, которые определяются по формуле:
P эм = m I 2 2 (r 2 ’/s)
m – число фаз.
M = M эм = (Pm/ω 0) (I 2 ’) 2 (r 2 ’/s)
Электромеханической характеристикой асинхронного двигателя является зависимость I2’ от скольжения. Но так как асинхронная машина работает только в качестве электродвигателя, основной характеристикой является механическая характеристика.
M = Mэ м = (Pm/ω 0) (I 2 ’) 2 (r 2 ’/s) – упрощенное выражение механической характеристики.
Подставив в это выражение значение тока, получим: M = / [ω 0 [(r 1 + r 2 ’/s) 2 + (x 1 + x 2 ’) 2 ]]
Вместо ω 0 нужно подставить механическую скорость, в результате чего число пар полюсов сокращается.
M = / [ω 0 [(r 1 + r 2 ’/s) 2 + (x 1 + x 2 ’) 2 ]] – это уравнение механической характеристики асинхронного двигателя.
При переходе асинхронного двигателя в генераторный режим, скорость вращения ω > ω 0 и скольжение становится отрицательным (s Когда скольжение изменяется от 0 до +∞, режим называется «режимом электромагнитного тормоза».
Задаваясь значениями скольжения от о до +∞, получим характеристику:
Полная механическая характеристика асинхронного двигателя.
Как видно из механической характеристики, она имеет два экстремума: один на отрезке изменения скольжения на участке от 0 до +∞, другой на отрезке от 0 до -∞. dM/ds=0
M max = / ] + относится к двигательному режиму. – относится к генераторному режиму.
M max =M кр M кр – критический момент.
Скольжение, при котором момент достигает максимума, называется критическим скольжением, и оно определяется по формуле: s кр = ±
Критическое скольжение имеет одинаковое значение и в двигательном и в генераторном режимах.
Величину M кр можно получить, подставив в формулу момента значение критического скольжения.
Момент при скольжении равном 1 называется пусковым моментом. Выражение для пускового момента можно получить, подставив 1 в формулу:
M п = / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Поскольку знаменатель в формуле момента максимального на несколько порядков больше U ф, принято считать M кр ≡U ф 2 .
Критическое скольжение зависит от величины активного сопротивления обмотки ротора R 2 ’. Момент пусковой, как видно из формулы, зависит от активного сопротивления ротора r 2 ’. это свойство пускового момента используется в асинхронных двигателях с фазным ротором, у которых пусковой момент увеличивают путем введения активного сопротивления в цепь ротора.
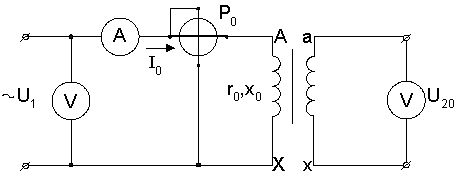
Режимом
холостого хода трансформатора называют
режим работы при питании одной из обмоток
трансформатора от источника с переменным
напряжением и при разомкнутых цепях
других обмоток. Такой режим работы может
быть у реального трансформатоpa, когда
он подключен к сети, а нагрузка, питаемая
от его вторичной обмотки, еще не включена.
По первичной обмотке трансформатора
проходит ток I 0 ,
в то же время во вторичной обмотке тока
нет, так как цепь ее разомкнута. Ток I 0 ,
проходя по первичной обмотке, создает
в магнитопроводе синусоидально
изменяющийся лоток Ф 0 ,
который из-за магнитных потерь отстает
по фазе от тока на угол потерь δ.
На величину вращающего момента асинхронного двигателя большое влияние оказывает сдвиг фаз между током I 2 и э. д. с. E 2S ротора.
Рассмотрим случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз можно пренебречь (фиг. 223, а).
Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающихся, предположим, по направлению часовой стрелки. Пользуясь правилом правой руки, определяем направление э. д. с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу левой руки. Как видно из чертежа, ротор под действием сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора велика. В этом случае сдвиг фаз между током ротора I 2 и э. д. с. ротора Е 2S будет также большим. На фиг. 223, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э. д. с. остается таким же, как и на фиг. 223, а, но вследствие запаздывания тока по фазе ось магнитного поля ротора не будет уже совпадать с нейтральной линией поля статора, а сместится на некоторый угол против вращения магнитного поля. Это приведет к тому, что наряду с образованием вращающего момента, направленного в одну сторону, некоторые проводники создадут встречный вращающий момент.
Отсюда видно, что общий вращающий момент двигателя при сдвиге фаз между током и э. д. с. ротора меньше, чем для случая, когда I 2 и Е 2S совпадают по фазе. Можно доказать, что вращающий момент асинхронного двигателя обусловливается только активной слагающей тока ротора, т. е. током I 2 cos и что он может быть вычислен по формуле:
Ф m -магнитный поток статора (а также приближенно равный результирующему магнитному потоку асинхронного двигателя);
Угол сдвига фаз между э. д. с. и током фазы обмотки
С - постоянный коэффициент.
После подстановки:
Из последнего выражения видно, что вращающий момент асинхронного двигателя зависит от скольжения.
На фиг. 224 изображена кривая А зависимости вращающего момента двигателя от скольжения. Из кривой видно, что в момент пуска, когда s=l и n = 0, вращающий момент двигателя невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos имеет малое значение (по-
|
рядка 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет небольшим.
При некотором скольжении S 1 вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения или, иначе говоря, при даль, нейшем увеличении скорости вращения двигателя его момент будет быстро умень-
Шаться и при скольжении s = 0 момент вращения двигателя бу- дет также равен нулю.
Следует оговориться, что у асинхронного двигателя скольжение, равное нулю, практически быть не может. Это возможно лишь в том случае, если ротору сообщить извне вращающий момент в сторону вращения поля статора.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э. д. с. ротора. Из формулы
видно, что если при постоянном индуктивном сопротивлении обмотки ротора увеличить активное сопротивление, то и сам угол будут уменьшаться, что приведет к тому, что и вращающий момент двигателя станут больше. Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят, как только двигатель увеличит скорость.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой B на фиг. 224). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (s = 1 кривой С).
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сопровождается резким уменьшением вращающего момента.
Мощность P 1 , подводимая к обмотке статора асинхронного двигателя, равна:
![]()
где m 1 - число фаз.
В статоре двигателя имеются следующие потери энергии:
1) в обмотке статора Р эс. =m 1 I 1 2 r 1 ;
2) в стали статора иа гистерезис и вихревые токи Р C .
Мощность, подводимая к ротору, представляет собой мощность вращающегося магнитного поля, называемую также электромагнитной мощностью Р эM .
Электромагнитная мощность равна разности между подводимой к двигателю мощностью и потерями в статоре двигателя, т. е.
|
Разность между Р эM и представляет собой электрические потери в обмотке ротора Р эP , если пренебречь потерями в стали ротора в виду их незначительности (частота перемагничивания ротора обычно очень мала):
Следовательно, потери в обмотке ротора пропорциональны скольжению ротора.
Если из механической мощности развиваемой ротором, вычесть механические потерн Р мх обусловленные трением в подшипниках ротора, трением о воздух и т. п., а также добавочные потери Р Д, возникающие при нагрузке и обусловленные полями рассеяния ротора, и потери, вызываемы: пульсациями магнитного поля в зубцах статора и ротора, то останется полезная мощность на валу двигателя, которую обозначим через P 2 .
К. п. д. асинхронного двигателя может быть определен по формуле:
Из последнего выражения видно, что момент вращения асинхронного двигателя пропорционален произведению из величины вращающегося магнитного потока, тока ротора и косинуса угла между э. д. с. ротора и его током,
Из схемы замещения асинхронного двигателя получается величина приведенного тока ротора, которую мы приводим без доказательства.











