Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда принципиально присутствовать колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла от разности и от скорости изменения параметров. В результате ПИД регулятор обеспечивает такое состояние исполнительного устройства (промежуточное между включен или выключен), при котором измеренный параметр равен заданному. Поскольку состояние исполнительного устройства стабилизируется, точность поддержания параметра в системе повышается в десятки раз. Таким образом, закон регулирования обеспечивает точность.
В принципе, точность поддержания будет определяться точностью измерения сигнала и интенсивностью внешних воздействий на объект.
Pb - начальная температура в системе
Туст-- заданная температура (уставка)
ti - постоянная времени интегрирования
td - постоянная времени дифференцирования
Сигнал управления для ПИД регулятора определяется тремя компонентами:
(П - пропорциональная компонента)
(И -интегральная компонента)
(Д -дифференциальная компонента)
Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента).
Качество управления, которое обеспечивает ПИД регулятор в значительной степени зависит от того, насколько хорошо выбранные параметры регулятора соответствуют свойствам системы. Это означает, что ПИД регулятор перед началом работы необходимо настроить.
Качество регулирования ПИД-регулятора определяется точностью настройки его параметров. Существует много различных методик настройки ПИД регуляторов. В основе большинства из них лежит анализ переходной характеристики.
Настройка пропорциональной компоненты ПИД-регулятораПеред настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, либо постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования- минимально возможной. Устанавливается необходимая уставка SP. Зона пропорциональности устанавливается равной 0 (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
Рис. 1
Т нач - начальная температура в системе
Т уст - заданная температура (уставка)
Размах колебаний температуры
Период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: Pb=DТ. Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
Рис. 2
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
На этапе установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.1, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.2. В качестве первого приближения постоянная времени дифференцирования делается равной ti = 0,2ґ Dt.
Настройка дифференциальной компоненты (td) ПИД-регулятора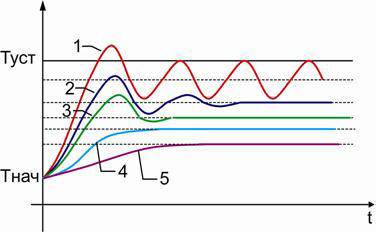
рис.1
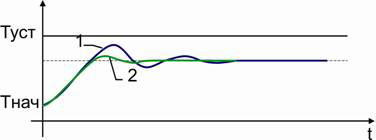
рис.2
На этапе настройки зоны пропорциональности установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.1, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.2. В качестве первого приближения постоянная времени дифференцирования делается равной ti = 0,2ґ Dt.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис.1). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (ti) ПИД-регулятора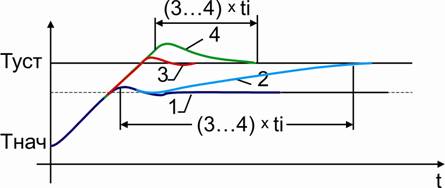
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на рис., кривая 1. Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины, равной Dt.
Переходная характеристика типа 2
Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым и длится примерно (3…4)ґ ti.
Переходная характеристика типа 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится (3…4)ґ ti. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3
Оптимальная.
НПФ КонтрАвт
При прочих равных условиях пропорционально-интегрально-дифференциальные или ПИД- (PID — Proportional- Integral- Derivative ) регуляторы позволяют поднять точность управления в 5-100 раз по сравнению с позиционным регулятором.
Наиболее часто в задачах АСУ ТП применяются двухпозиционное регулирование и пропорционально-интегрально-дифференциальное (ПИД) регулирование.
Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда принципиально присутствовать колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла от разности и от скорости изменения параметров. В результате ПИД регулятор обеспечивает такое состояние исполнительного устройства (промежуточное между включен или выключен), при котором измеренный параметр равен заданному. Поскольку состояние исполнительного устройства стабилизируется, точность поддержания параметра в системе повышается в десятки раз. Таким образом, закон регулирования обеспечивает точность.
В принципе, точность поддержания будет определяться точностью измерения сигнала и интенсивностью внешних воздействий на объект.
Pb — начальная температура в системе
Туст— заданная температура (уставка)
ti — постоянная времени интегрирования
td — постоянная времени дифференцирования
Сигнал управления для ПИД регулятора определяется тремя компонентами:
(П — пропорциональная компонента).
(И -интегральная компонента).
(Д -дифференциальная компонента).
T уст -заданная температура (уставка)
t i -заданная температура (уставка)
t d -заданная температура (уставка)
Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента).
Качество управления, которое обеспечивает ПИД регулятор в значительной степени зависит от того, насколько хорошо выбранные параметры регулятора соответствуют свойствам системы. Это означает, что ПИД регулятор перед началом работы необходимо настроить.
Качество регулирования ПИД-регулятора определяется точностью настройки его параметров. Существует много различных методик настройки ПИД регуляторов. В основе большинства из них лежит анализ переходной характеристики. Отметим, что все ПИД-регуляторы НПФ КонтрАвт имеют функции автонастройки параметров регулирования, что дает возможность быстро получить высокое качество регулирования даже неспециалистам.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
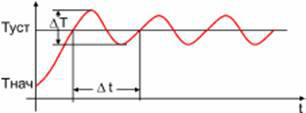
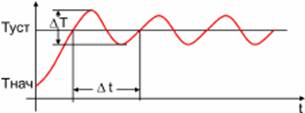
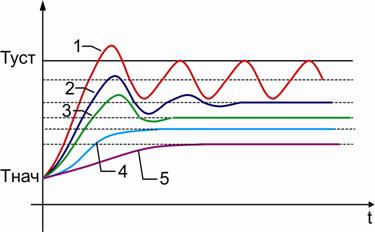
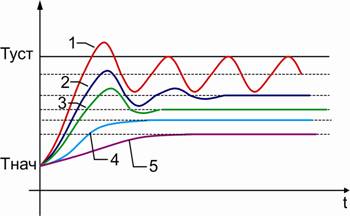
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, либо постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования- минимально возможной. Устанавливается необходимая уставка SP. Зона пропорциональности устанавливается равной 0 (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
Рис. 1
Т нач — начальная температура в системе
Т уст — заданная температура (уставка)
— размах колебаний температуры
— период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: Pb=DТ. Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
Рис. 2
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Этап 2. Настройка дифференциальной компоненты td
рис.1 рис.2 Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует сразу перейти к этапу 3 ().
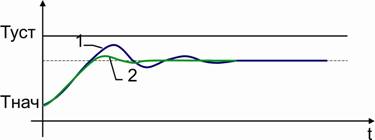
На этапе 1. настройки зоны пропорциональности установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.1, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.2. В качестве первого приближения постоянная времени дифференцирования делается равной ti = 0,2ґ Dt.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис.1). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка интегральной компоненты ti
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на рис., кривая 1. Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины, равной Dt.
Переходная характеристика типа 2
Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым и длится примерно (3…4)ґ ti.
Переходная характеристика типа 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится (3…4)ґ ti. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3
Оптимальная.
Во всех ПИД-регуляторах НПФ КонтрАвт реализован режим автоматической настройки параметров.
Она уменьшает время пуска-наладки и позволяет получить высокое качество регулирования даже пользователям-неспециалистам.
В этом режиме регулятор выполняет двухпозиционное регулирование и по колебаниям измеренного сигнала рассчитывает параметры ПИД регулятора, а затем автоматически переходит в режим ПИД регулирования. Длительность настройки – один период колебаний в системе.
Функция ПИД-регулирования может использоваться при управлении процессами поддержания давления, расхода, температуры и т.п. Блок-схема частотно-регулируемого электропривода с ПИД-регулированием приведена на рис. 1.
Рис. 1. Блок-схема ПИД-регулирования
Настройка ПИД-регулятора
Производится в соответствии с требованиями управляемой системы, сигналом задания и сигналом обратной связи. Подробно процедура настройки излагается в инструкции по эксплуатации конкретного преобразователя частоты.
Настраиваемые параметры для ПИД-регулирования приведены в табл. 1.
Таблица 1. Настраиваемые параметры ПИД-регулирования
Настройка пропорционального звена
Пропорциональное звено (П) усиливает отклонение (разницу между заданием и сигналом обратной связи), чтобы ввести коррекцию для регулирования пропорционально отклонению. При увеличении его значения реакция на управляющее воздействие ускоряется, но чрезмерное увеличение коэффициента пропорциональности может вызвать нестабильную работу и колебания (рис. 2).
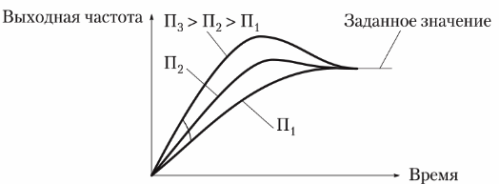
Рис. 2. Настройка пропорционального звена (П-звена) ПИД-регулятора
Настройка интегрирующего звена
Интегрирующее звено (И) сводит к нулю остаточное отклонение после пропорционального звена. Чем больше коэффициент интегрирования, тем меньше остаточное отклонение, но чрезмерное увеличение может вызвать нестабильную работу и колебания (рис. 3).
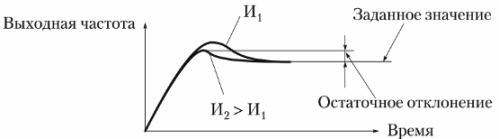
Рис. 3. Настройка интегрирующего звена (И-звена) ПИД-регулятора
Настройка дифференцирующего звена
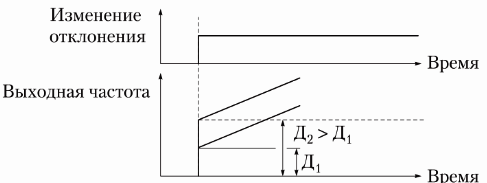
Дифференцирующее звено (Д) улучшает реакцию системы, когда отклонения быстро меняются. Однако чрезмерное увеличение коэффициента дифференцирования может вызвать колебания выходной частоты.
Фильтр задержки предназначен для сдерживания быстро изменяющихся отклонений (звено запаздывания первого порядка). Если уменьшить задержку, процесс ускорится, и наоборот (рис. 4).
Настройка ПИД регулятора
При прочих равных условиях пропорционально-интегрально-дифференциальные или ПИД (PID - Proportional-Integral-Derivative) регуляторы позволяют поднять точность управления в 5-100 раз по сравнению с позиционным регулятором.
Наиболее часто в задачах АСУ применяются двухпозиционное регулирование и ПИД регулирование.
Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда присутствуют колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла отклонения измеренной величины от заданной и от скорости изменения параметров. В результате ПИД регулятор обеспечивает такое состояние исполнительного устройства, при котором измеренный параметр равен заданному. Поскольку состояние исполнительного устройства стабилизируется, точность поддержания параметра в системе повышается в десятки раз.
Сигнал управления для ПИД регулятора определяется суммой трех компонент (пропорциональной, интегральной и дифференциальной):
Постоянная времени интегрирования; http://pandia.ru/text/79/576/images/image004_67.gif" width="57" height="47 src="> - относительный диапазон
Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента).
Качество управления, которое обеспечивает ПИД регулятор в значительной степени зависит от того, насколько хорошо выбранные параметры регулятора соответствуют свойствам системы. Это означает, что ПИД регулятор перед началом работы необходимо настроить.
Качество регулирования ПИД-регулятора определяется точностью настройки его параметров. Существует много различных методик настройки ПИД регуляторов.
Настройка на основе анализа переходной характеристики
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются(постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования минимально возможной). Устанавливается необходимая уставка. Зона пропорциональности устанавливается (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
http://pandia.ru/text/79/576/images/image007_45.gif" width="28" height="25 src=">.gif" width="20" height="19 src="> - период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: . Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Этап 2. Настройка дифференциальной компоненты () ПИД-регулятора
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует сразу перейти к этапу 3 (Настройка интегральной компоненты ).
На этапе настройки зоны пропорциональности установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.2, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.3. В качестве первого приближения постоянная времени дифференцирования делается равной .
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис.2). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка интегральной компоненты () ПИД-регулятора
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на рис.4, кривая 1. Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины, равной .
Переходная характеристика типа 2
Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым и длится примерно .
Переходная характеристика типа 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится . Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3
Оптимальная.
Метод Зиглера–Никольса
Метод работает не для любой системы, результаты получаются не самыми оптимальными. Но, зато, метод очень простой и годится для базовой настройки регулятора в большинстве систем.
Суть метода состоит в следующем:
1..gif" width="20" height="24 src=">.gif" width="17" height="24 src="> - максимальный, постоянные времени интегрирования и дифференцирования - максимальные).









