Исполнительный механизм (ИМ) – это звено исполнительного устройства, предназначенное для перемещения затвора регулирующего органа в соответствии с управляющими сигналами (командной информацией).
По виду энергии, используемой для создания перестановочного усилия, ИМ делятся на:
- электрические;
- пневматические;
- гидравлические.
Электрические ИМ делятся на соленоидные и электродвигательные.
Пневматические ИМ могут быть мембранными ипоршневыми.
Рис. 1. Схема мембранного исполнительного механизма.
1 – корпус головки; 2 – мембрана; 3 – диск; 4 – шток; 5 – пружина; 6 – болты.
Между фланцами корпуса 1 с помощью болтов 6 зажата по периметру мембрана из прорезиненной ткани 2 с металлическим диском 3, который скреплен со штоком 4.
При отклонении регулируемой величины от заданного значения давление воздуха Р, поступающего от пневматического регулятора через медную трубку в полость над мембраной 2 и диском 3, изменяется, шток перемещается либо вниз (при увеличении давления), либо вверх (при уменьшении давления). Причем зависимость между давлением воздуха и перемещением штока имеет линейный характер.
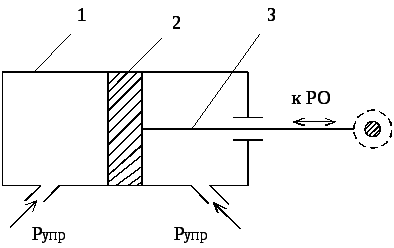
Поршневой ИМ (рис.2.) состоит из цилиндра 1 с поршнем 2, шток которого 3 сочленяется с регулирующим органом РО. В зависимости от того, в какую полость цилиндра будет поступать управляющий сигнал, поршень со штоком будет перемещаться либо вправо, либо влево.
Рис.2 Схема поршневого исполнительного механизма
1 – цилиндр; 2 – поршень; 3 – шток.
Максимальное усилие, развиваемое поршневым ИМ равно 4,4*10 4 Н, а максимальный ход поршня составляет 300 мм.
Гидравлические ИМ предназначены для преобразования сигнала (разности давлений масла), поступающего от гидравлического регулятора, в перемещение регулирующего органа. По принципу действия он аналогичен поршневому ИМ.
Регулирующий орган (РО) - это звено исполнительного устройства, непосредственно воздействующее на процесс путем изменения пропускной способности; представляет собой переменное гидравлическое сопротивление, воздействующее на расход среды за счет изменения своего проходного сечения.
Для непрерывного и позиционного регулирования применяются следующие типы РО:
- дисковые (заслоночные) РО, в которых изменение гидравлического сопротивления достигается за счет поворота относительно горизонтальной оси диска (заслонки), помещенного в специальную обойму.
- одно- и двухседельные РО, в которых изменение гидравлического сопротивления достигается за счет поступательного перемещения затвора (плунжера) вдоль проходов одного или двух седел.
- трехходовые регулирующие клапаны, предназначенные для смешения двух потоков или для разделения одного потока на два.
- шланговые РО отличаются от остальных тем, что регулируемое вещество проходит в них через эластичный патрубок (шланг), который, деформируясь под действием ИМ, изменяет площадь проходного сечения а, следовательно, и расход.
Диафрагмовые РК изменяют свое гидравлическое сопротивления благодаря поступательному перемещению центра диафрагмы относительно седла, представляющего собою перегородку в корпусе.


Рис.3. Дисковый РО Рис.4. Односедельный РО
1 – корпус; 2 – седло; 3 – затвор.
Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
где k p – коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:
Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
 ,
,
где Т и – время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
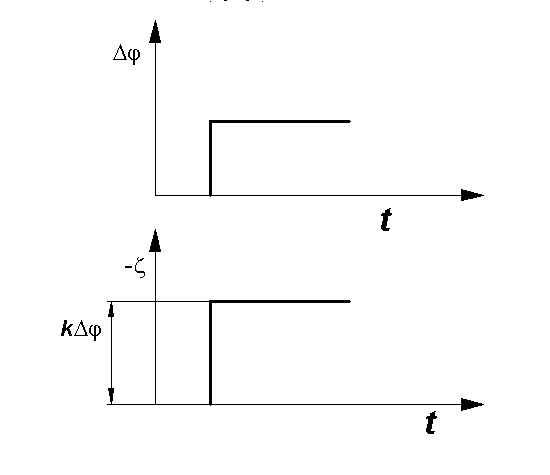
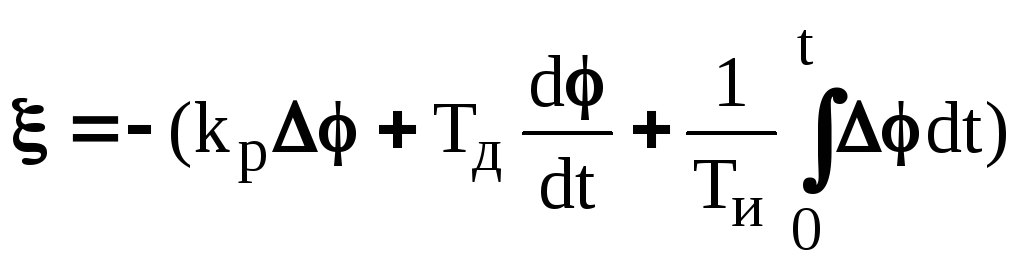
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:
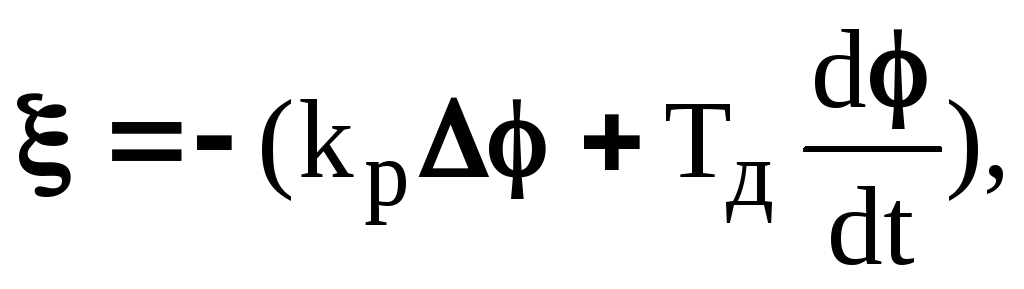
где Т д – время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:
Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
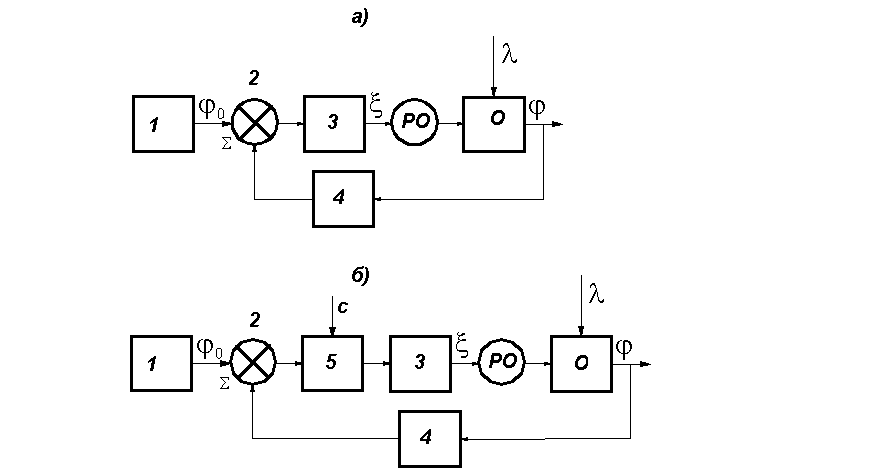
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О - объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
астатические регуляторы
статические регуляторы
программные регуляторы
двухпозиционные регуляторы.
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.
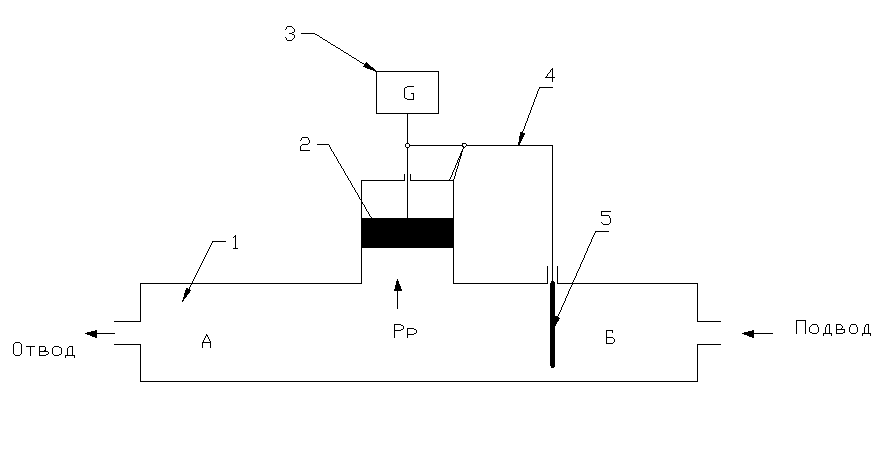
Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган)
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Р р и уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Р р, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.

Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 - передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган)
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru
Введение
Заключение
Список литературы
Введение
регулятор сигнал автоматический
Современный этап развития автоматизации технологических процессов характеризуется усложнением задач автоматического регулирования и управления, значительным увеличением числа регулируемых параметров, совершенствованием разработанных и созданием новых функциональных элементов систем непрерывного и дискретного действия, а также повышением точности регулирования на основе применения средств микропроцессорной техники и микроЭВМ. Объективная необходимость повышения производительности труда, экономии сырья и рабочей силы на предприятиях пищевой промышленности требует автоматизации производственных процессов и, в частности, создания и использования автоматизированных систем управления технологическими процессами.Возможность и уровень автоматизации пищевых производств зависят от многих факторов и предпосылок: характера и степени непрерывности технологического процесса, уровня механизации, характеристик системы управления, наличия их математической модели и алгоритмов функционирования и др.
К особенностям автоматизации пищевых производств относятся следующие: сочетания непрерывных и циклических процессов, значительные колебания свойств исходного сырья, недостаточная изученность, во многих случаях - отсутствие как математического описания технологических процессов и pa6oты технологического оборудования, так и необходимой аппаратуры автоматики. В производстве пищевой продукции можно выделить три аспекта. Первый аспект связан с управлением процессами, в основе которых лежат изменения физико-химических свойств или геометрических размеров исходного сырья. В этом случае задача управления сводится к измерению, контролю и регулированию физико-химических параметров, характеризующих протекание технологического процесса. Второй аспект связан с управлением технологическим оборудованием, которое должно обеспечивать протекание процессов в оптимальном режиме. Третий аспект включает вопросы автоматизации процессов обслуживания технологического оборудования.
Объем автоматизации технологических процессов определяется тремя факторами: необходимостью, экономической целесообразностью и экологией окружающей среды. К первому фактору относится автоматизация технологических процессов, которыми человек не в состоянии управлять. Средства автоматизации, применение которых обусловлено необходимостью не учитываются при оценке экономической эффективности, при определении рационального объема автоматизации. Второй фактор - экономическая эффективность - поддается расчету и позволяет оценить экономическую эффективность внедрения средств автоматизации с учетом социальных вопросов улучшения условий труда обслуживающего персонала. Следует отметить, что автоматизация процессов практически всегда способствует положительному решению вопросов экологии, так как все автоматизированные процессы при правильной настройке средств автоматики протекают в оптимальных режимах.
Регулятор -- это устройство, которое управляет величиной контролируемого параметра. Регуляторы используются в системах автоматического регулирования. Они следят за отклонением контролируемого параметра от заданного значения и формируют управляющие сигналы для минимизации этого отклонения.
Наиболее известных на российском рынке производителей:
Регуляторы производства МЗТА
Регуляторы и измерители производства ОВЕН
1. Классификация регуляторов. Их виды и преимущества
Для классификации регуляторов используется ряд параметров. Рассмотрим их детально.
В системах автоматического регулирования наиболее распространенными являются П регулятор, ПИ регулятор, ПИД регулятор, позиционный регулятор. Часто отдельно выделяют ШИМ регуляторы, но это ПДД регулятор, выход которого преобразуется в один или два дискретных сигнала с помощью широтноимпульсной модуляции. Кроме того, сейчас появляется все больше регуляторов, реализующих законы управления на базе нечеткой логики нечеткий регулятор.
Объект управления (ОУ) или объект регулирования - устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями.
Управление - формирование управляющих воздействий по определенному закону, обеспечивающих требуемый режим работы ОУ.
Автоматическое управление - управление, осуществляемое без непосредственного участия человека.
Задача регулирования - доведение выходной величины объекта регулирования до заранее определенного значения и удержания ее на данном значении с учетом влияния возмущающих воздействий.
Система автоматического регулирования (САР) - автоматическая система с замкнутой цепью воздействия (см. рис Структурная схема простейшей системы регулирования), в котором управление Y вырабатывается в результате сравнения истинного значения (PV=X) с заданным значением SP. Основное назначение САР заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону.
Выходное воздействие (Y) - воздействие, выдаваемое на выходе системы управления или устройства регулирования. В литературе по автоматизации также встречаются аббревиатуры, соответствующие данному определению:
Задающее воздействие - воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
Возмущающее воздействие - воздействие, стремящееся нарушить функциональную связь между задающим воздействием и регулируемой величиной.
Обрамтная связь -- это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры, от которых зависит функционирование этой системы. Другими словами, на вход системы подаётся сигнал, пропорциональный её выходному сигналу (или, в общем случае, являющийся функцией этого сигнала). Часто это делается преднамеренно, чтобы повлиять на динамику функционирования системы.
Различают положительную и отрицательную обратную связь. Отрицательная обратная связь изменяет входной сигнал таким образом, чтобы противодействовать изменению выходного сигнала. Это делает систему более устойчивой к случайному изменению параметров. Положительная обратная связь, наоборот, усиливает изменение выходного сигнала. Системы с сильной положительной обратной связью проявляют тенденцию к неустойчивости, в них могут возникать незатухающие колебания, т.е. система становится генератором.
Регулятор -- в теории управления устройство, которое следит за работой объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления (непосредственно, либо с помощью наблюдателей) и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления.
2. Тип выходного сигнала управления ПИД регулятора в системах автоматического регулирования
Исполнительные механизмы систем автоматического регулирования могут иметь различные типы входных сигналов. Так, некоторые управляются унифицированным сигналом, некоторые для регулирования используют 1 дискретный вход (например, регулятор температуры в печи), а некоторые - два дискретных входа (например, регулятор давления пара в аппарате управляет задвижкой: используются два сигнала - один на открытие, а другой на закрытие задвижки). Соответственно и регуляторы могут иметь для управления либо аналоговый выходной сигнал, либо один или два дискретных сигнала для реализации ШИМ управления (ШИМ регулятор), либо дискретный выход реализующий фазоимпульсное управление мощностью. Номенклатура приборов, которые мы предлагаем для создания систем автоматического регулирования, включает в себя регуляторы как с аналоговым выходом, так и с дискретными выходами, реализующими широтно-импульсную модуляцию управляющего сигнала.
Наличие ретрансляционного выхода
Дискретные выходы и возможность их программирования
При наличии аналогового управляющего сигнала регулятор может иметь один или два дискретных сигнала для реализации функций сигнализации, защиты или других. Так, например, ПИД регулятор температуры может формировать сигналы тревог при выходе регулируемого параметра за указанные границы.
Наличие программного задатчика (регулятор давления, регулятор температуры)
Часто в системах автоматического регулирования циклических процессов требуется по определенной программе менять величину задания регулятора. Для этого используется программный задатчик. Параметрами оценки таких регуляторов являются число шагов программы, максимальная и минимальная длинна шага программы, возможность плавного изменения задания на шаге. Так например ПИД регулятор температуры и ПИД регулятор давления в системе автоматического регулирования установки выращивания кристаллов имеют сложные программы изменения их заданий.
Число входных сигналов системы регулирования, участвующих в формировании управляющего сигнала (регулятор расхода)
Часто надо регулировать какой-либо параметр с коррекцией управляющего сигнала по величине другого параметра (например, регулятор расхода газа с коррекцией по температуре). Другим примером может быть реализация каскадного регулирования.
Тип регулируемого параметра
Существуют универсальные регуляторы - им на вход можно подать любой тип сигнала. С их помощью можно делать системы регулирования любых технологических параметров. Однако часто тип регулируемого параметра жестко ограничен: регулятор давления, регулятор температуры, регулятор уровня, регулятор расхода и т.п. Это связано с тем, что для измерения различных типов сигналов могут использоваться различные алгоритмы обработки. Так регулятор температуры предполагает при получении сигналов от термопар компенсацию температуры холодных спаев и преобразование величины контролируемой термо ЭДС в значение температуры. В регуляторе расхода часто надо уточнить величину измеренного расхода по значению давления и температуры контролируемой среды. Поэтому, чтобы упростить программу, зашитую в регулятор, и удешевить изделие производители разделяют их по назначению.
3. Описание работы регуляторов
Часто в системах автоматического регулирования величиной технологического параметра надо не только управлять, а так же ее надо регистрировать. Для этого многие регуляторы имеют дополнительный аналоговый выход. На него подается в заданном масштабе величина регулируемого параметра. Этот выход может быть заведен на вход регистрирующего прибора.
Точность регулирования
По этому параметру можно выделить общепромышленные и прецизионные регуляторы. В качестве примера можно привести прецизионный регулятор температуры ПРОТЕРМ.
Наличие интерфейса связи с другим оборудованием
Современные системы регулирования обычно являются частью крупных систем управления. Чтобы интегрировать регуляторы с остальным оборудованием или реализовать удобный интерфейс пользователя на операторской станции они должен иметь интерфейс связи. Самые простые регуляторы не имеют средств подключения. Наиболее распространенными интерфейсами для связи с верхним уровнем являются RS-232 и RS-485. Многие производители реализуют свой протокол обмена с регуляторами, но наиболее распространенным, можно сказать стандартным, стала поддержка протокола MODBUS RTU.
Наличие и качество алгоритмов автонастройки параметров системы регулирования
Это очень важная функция для создания системы автоматического регулирования на объекта, чьи динамические характеристики заранее не известны или сильно меняются во времени.
Число обслуживаемых контуров регулирования
Наиболее распространены регуляторы на один контур. Но в настоящее время все больше появляется многоконтурных регуляторов. Такие регуляторы часто позволяют реализовать взаимосвязанное регулирование параметров.
Питание регуляторов
Важным параметром является необходимость использования внешнего источника питания на 24В постоянного тока и наличие встроенного питания измерительных цепей.
Заключение
Пропорциональная составляющая является основой регулирующего воздействия для рассмотренного пневматического ПИД-регулятора.
Улучшая временную характеристику переходного процесса, вместе с тем снижаем устойчивость системы автоматического регулирования.
ПИД-регуляторы целесообразно применять в САР с большой инерцией. В качестве примеров таких систем можно назвать:
Бак (емкость), в который для заметного изменение уровня требуется налить или вылить большой объем жидкости;
Теплообменник, в котором внутренний теплообмен протекает медленно и датчик температуры работает с запаздыванием.
Пневматические П-, ПИ-, ПД- и ПИД-регуляторы, в основном, применяются в нефтегазохимической промышленности и в местах с повышенными требованиями к взрывобезопасности и пожарной безопасности.
Для надежной работы пневморегуляторов требуется выдерживать параметры сервисного воздуха, а также проводить регулярное техническое обслуживание, что сопряжено с дополнительными затратами по эксплуатации.
Воплощение различных структурных схем регуляторов значительно упростилось с появлением ПИД-регуляторов на базе микропроцессоров.
Как правило, в таких регуляторах сигнал рассогласования одновременно подается на параллельные ветви, формирующие пропорциональную, интегральную и дифференциальную составляющие, которые затем суммируются и усиливаются. Т.е. каждую ветвь возможно рассматривать как отдельный регулятор. Благодаря независимой работе, интегральная составляющая к концу переходного процесса полностью замещает пропорциональную составляющую.
Несмотря на все многообразие выпускаемых ПИД-регуляторов, принцип их действия остается неизменным.
Список литературы
1. Щагин А.В. и др. Основы автоматизации техпроцессов. - М.: Высшее образование, 2009. - 163 с.
2. Голоденко Б.А. Имитационное моделирование в среде GPSS: пособие по курсовому проектированию. - Воронеж: МИКТ, 2007. - 112 с.
3. Alex Demyanenko, Control theory. PID Controller, - Copyright © 2007 - 2009
4. Битюков В.К., Волчкевич Л.И., Голоденко Б.А. Автоматизация технологических процессов промышленных производств: учебное пособие. - Воронеж: ВГТА, 2007. - 212 с.
5. Битюков В.К., Голоденко Б.А. Технология. Основные этапы и прогнозы развития: учебное пособие. - Воронеж: ВГТА, 2006. - 264 с.
6. Лазарев Ю. Моделирование процессов и систем в MATLAB. - СПб: Питер, 2005.
Размещено на www.allbest.
...Изучение общих принципов построения пропорционально-интегрально-дифференциальных технологических регуляторов. Проектирование алгоритма регуляторов температуры на базе дешевых микроконтроллеров MSP430 (Texas Instruments). Дискретная форма регулятора.
дипломная работа , добавлен 12.10.2015
Описание основных этапов решения задач о синтезе регуляторов. Применение законов П- и И-регулирования в автоматических системах. Сущность области допустимых значений переходной функции. Требования, предъявляемые к системам автоматического регулирования.
контрольная работа , добавлен 11.05.2012
Синтез и анализ оптимальной одноконтурной системы автоматического управления. Расчеты по использованию регуляторов, реализующих ПИ- и ПИД-закон регулирования в цифровых системах. Выбор типа промышленного регулятора, определение его настроечных параметров.
курсовая работа , добавлен 11.02.2016
Виды и использование датчиков автоматического контроля режимных параметров технологических процессов химического производства. Принцип действия измеряемых датчиков, регуляторов температуры, модульных выключателей. Средства защиты электроустановок.
дипломная работа , добавлен 26.04.2014
Расчёт комплексной частотной характеристики объекта в требуемом диапазоне частот. Определение запаса устойчивости замкнутой автоматической системы регулирования. Оценка качества управления при использовании ПИ и ПИД регуляторов и выбор лучшего и них.
курсовая работа , добавлен 12.04.2014
Описание устройства регулятора напряжения. Основное назначение и область применения прибора. Рассмотрение особенностей регулятора на основе тиристоров, магнитных усилителей, транзисторов. Синхронный компенсатор: понятие, назначение, принцип работы.
реферат , добавлен 03.11.2015
Расчет настроек разных типов регуляторов методом расширенных характеристик. Построение графиков переходных процессов. Способы реализации, принцип работы и вычисление основных параметров комбинированной и цифровой систем автоматического регулирования.
курсовая работа , добавлен 11.11.2013
Разгонная характеристика объекта регулирования и определение параметров, характеризующие инерционные свойства объекта. Расчет параметров настройки регуляторов по амплитудно-фазовой характеристике объекта регулирования. Расчет показателей качества САР.
курсовая работа , добавлен 22.10.2012
Функциональная и структурная схема канала регулирования. Синтез регулятора тока и скорости. Статический и динамический расчет системы и переходных процессов. Качество настройки регулятора. Принципиальная электрическая схема якорного канала регулирования.
курсовая работа , добавлен 28.09.2012
Метод расширенных частотных характеристик. Обзор требований к показателям качества. Компьютерные методы синтеза систем автоматического регулирования в среде Matlab. Построение линии равного затухания системы. Определение оптимальных настроек регулятора.
В холодильной и криогенной технике, а также в системах кондиционирования воздуха, широкое распространение получили промышленные автоматические регуляторы, реализующие различные законы регулирования.
Уравнение регулятора, отображающее закон его регулирования, устанавливает зависимость формирования управляющего (выходного) сигнала U(τ), воздействующего на регулирующий орган РО, от отклонения регулируемой величины Δy (входного сигнала) от заданного значения.
Таким образом, закон регулирования – это вид математической зависимости между выходной и входной величинами регулятора .
Упрощенная структура автоматической системы регулирования приведена на рис. 3.3.
Рисунок 3.3. Функциональная схема АСР
Принцип действия АСР. Регулируемая величина y объекта автоматизации, значение которой в текущий момент времени обозначен y т, поступает на вход элемента сравнения ЭС регулятора и сравнивается с заданным значением y зад . На выходе ЭС формируется сиг-нал рассогласования Δy = y зад - y т , величина которого является исходными данными для формирования управляющего сигнала. По значению Δy и виду закона регулирования, заложенного в усилитель-формирователь УФ, на выходе автоматического регулятора АР формируется сигнал управления U, параметры которого определяют поведение регулирующего органа РО (скорость и величину перемещения).
Входная величина объекта регулирования x (вещество или энергия), влияющая на состояние регулируемой величины y , под воздействием РО, преобразуется в регулирующее воздействие x р , способное скомпенсировать возмущение F , отклонившее регулируемую величину от заданного значения.
По виду управляющего сигнала, законы регулирования подразделяются на дискретные: импульсные (АИ, ШИ, ЧИ) или позиционные (двух-, трех- и многопозиционные), и непрерывные: пропорциональный (П), интегральный (И), дифференциальный (Д), и их комбинации: пропорционально-интегральный (ПИ), пропорционально-диф-ый (ПД) и пропорционально-интегрально-дифференциальный (ПИД). В соответствии с этими законами, непрерывные промышленные регуляторы обозначаются как П-регулятор, ПИ-регулятор, ПД-регулятор и ПИД-регулятор, а дискретные регуляторы получили название: двух-, трех- или многопозиционные регуляторы.
Регуляторы с различными законами регулирования имеют свои, свойственные им, переходные процессы, в результате которых происходит перемещение регулирующего органа и изменение подачи вещества или энергии на объект регулирования.
Пояснение. Для обеспечения требуемого качества технологического процесса в объекте регулирования, в переходном режиме, выбирается тип регулятора и осуществляется расчет его настроечных параметров. Расчет параметров настройки регулятора производится по динамическим показателям объекта регулирования: постоянной времени Тоб и величине запаздывания τоб.
Описываются нелинейными законами регулирования и подразделяются на импульсные и позиционные .
Импульсные (дискретные во времени).
У них выходная величина U может принимать любое значение, но только в определенные промежутки времени. В интервалах между импульсами сигнал пропадает. Количество импульсов ограничено на интервале времени ∆Т = - τ 1 .
Характеристика АР с импульсными законами регулирования приведена на рис.3.4.

Рисунок 3.4. Импульсные законы регулирования
Импульсные законы регулирования подразделяются на:
Амплитудно-импульсные (АИ);
Широтно-импульсные (ШИМ);
Частотно-импульсные (ЧИ)
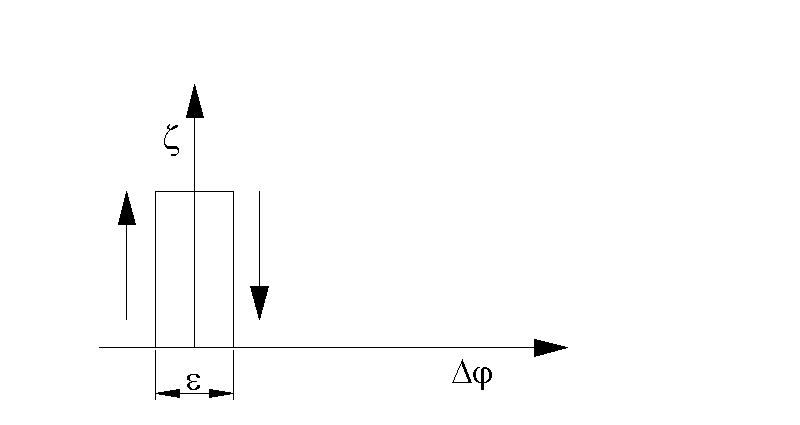
Позиционные (дискретные по уровню).
У них выходной сигналUимеет фиксированное (конечное) число выходных значений (два, три или несколько). Такие законы, а соответственно и регуляторы, называются двух-, трех- и многопозиционными.
Характеристики позиционных законов регулирования приведены на рис. 3.5.
Рисунок 3.5. Позиционные законы регулирования
Под воздействием сигнала у Т , поступающего от датчика, и сформированного сигнала рассогласования ∆у выходной сигнал регулятора U воздействует на регулирующий орган, который может принимать одно из положений, соответствующих U1, U2 ... Un, т.е. они осуществляют ступенчатое регулирующее воздействие.
Наиболее простым и широко используемым позиционным законом регулирования является двухпозиционный закон, у которого выходной сигнал принимает только два установившихся значения 1 или 0.
(Раздел 3. Управление энергетическими объектами на базе дискретных и непрерывных законов
регулирования
Свойства автоматических систем регулирования зависят от свойств объекта и от свойств регулятора. Поэтому при проектировании АСР, учитывая свойства объекта, обосновывают применение того или иного типа регулятора, чтобы система автоматического регулирования была по возможности простой, надежной и имела свойства, удовлетворяющие требованиям эксплуатации в отношении точности поддержания регулируемого параметра и качества переходного процесса.
Таким образом, в зависимости от свойств объекта и эксплуатационных требований к его параметрам выбирается тот или иной тип регулятора и формирующий им закон регулирования.
Настройку систем автоматического регулирования можно осуществить только при знании обслуживающим персоналом теоретических основ автоматического регулирования.
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию дляпроцессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. В современных системахуправления используются цифровые программные регуляторы.
По закону регулирования они делятся на двух- и трех-позиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные снормированными входными и выходными сигналами, пригодные для Управления различными параметрами.
По виду выполняемых функций регуляторы разделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Автоматический регулятор давления состоит из исполнительного механизма и регулирующего органа. Основной частью исполнительного механизма является чувствительный элемент, который сравнивает сигналы задатчика и текущего значения регулируемого давления. Исполнительный механизм преобразует командный сигнал в регулирующее воздействие и в соответствующее перемещение подвижной части регулирующего органа за счет энергии рабочей среды (это может быть энергия газа, проходящего через регулятор, либо энергия среды от внешнего источника - электрическая, сжатого воздуха, гидравлическая).
Если перестановочное усилие, развиваемое чувствительным элементом регулятора, достаточно большое, то он сам осуществляет функции управления регулирующим органом. Такие регуляторы называются регуляторами прямого действия. Для достижения необходимой точности регулирования и увеличения перестановочного усилия между чувствительным элементом и регулирующим органом может устанавливаться усилитель - командный прибор (иногда называемый «пилотом»). Измеритель управляет усилителем, в котором за счет постороннего воздействия (энергии рабочей среды) создается усилие, передающееся на регулирующий орган.
Исходя из закона регулирования, положенного в основу работы, регуляторы давления бывают астатические, статические и изодромные.
В системах газораспределения два первых типа регуляторов получили наибольшее распространение.









