Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию дляпроцессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
Не путайте с блокировкой диода фотоэлектрических модулей, что функции, которые они выполняют, сильно отличаются друг от друга. Если по ошибке или неисправности изоляции произошла ошибка в заземлении системы защиты, ток может протекать в обратном направлении в нормальное состояние и проходить через панель или группу солнечных батарей перед солнечной В этих случаях присутствие блокирующего диода очень важно, чтобы избежать повреждения фотоэлектрических модулей.
Очень хорошая изоляция и хорошее заземление позволяют избежать необходимости установки блокирующего диода. Поскольку блокирующий диод производит дополнительное падение напряжения от 0, 5 до 1 В, является еще одной причиной для проектирования напряжения в качестве панелей, необходимых для зарядки батарей.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. В современных системахуправления используются цифровые программные регуляторы.
Таким образом, модули могут работать в максимальной точке питания и, таким образом, с максимальной эффективностью. Когда мы подключаем модуль непосредственно к батарее с напряжением между клеммами, которые в это время составляют 12 В, модуль действительно способен доставлять.
Другими словами, какая из 53 Вт доступна, когда батарея заряжается непосредственно с 12 В для единственного преимущества 36, 6 Вт, что означает потерю мощности на 30%. Вопрос в том, где отсутствует остальная часть Ватта? Ответ нигде не из-за того, что модуль генерации не является током и мощностью.
По закону регулирования они делятся на двух- и трех-позиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
Решение: получить максимальную мощность фотоэлектрического модуля с помощью контроллеров заряда с максимальной мощностью поисковой системы. В этом исследовании развивается последующая интенсивность компенсации напряжения. Батареи лодки подвергаются глубоким разрядам. Чтобы зарядить батарею, подверженную таким ограничениям, необходимо соблюдать ряд параметров, чтобы сохранить их.
Принимая во внимание температуру Цикл зарядки в 3 этапа. . Эти точки разработаны и объяснены в разделе регулирования нагрузки. Сначала будут изучены регуляторы с основными механизмами, а затем будут объяснены различные способы их преобразования в усовершенствованные регуляторы.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные снормированными входными и выходными сигналами, пригодные для Управления различными параметрами.
По виду выполняемых функций регуляторы разделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Управление ВКЛ / ВЫКЛ Этот тип регулятора имеет тенденцию исчезать в пользу электронного регулятора постоянного напряжения. Его режим работы соответствует режиму работы автомобильных генераторов. Постоянный регулятор напряжения. Операция электромеханическая: напряжение задано на регуляторе, а выходное напряжение генератора восстанавливается и сравнивается с заданным значением. Если это значение больше заданного значения, контакт открывается, что вызывает падение напряжения на выходе генератора; если напряжение ниже заданного значения, контакт замыкается и напряжение увеличивается.
Автоматический регулятор давления состоит из исполнительного механизма и регулирующего органа. Основной частью исполнительного механизма является чувствительный элемент, который сравнивает сигналы задатчика и текущего значения регулируемого давления. Исполнительный механизм преобразует командный сигнал в регулирующее воздействие и в соответствующее перемещение подвижной части регулирующего органа за счет энергии рабочей среды (это может быть энергия газа, проходящего через регулятор, либо энергия среды от внешнего источника - электрическая, сжатого воздуха, гидравлическая).
На этом типе генератора напряжение колеблется вокруг заданного значения в конце зарядки. Недостаток заключается в том, что он не учитывает технологию батареи или скорость разряда, которая приводит к перегрузке или только частичной зарядке аккумулятора. В обоих случаях батарея ухудшается. Постоянный регулятор напряжения с электронным управлением. Это эволюция контроллера включения-выключения, напряжение батареи сравнивается с опорным напряжением и интегрируется и фильтруется для регулировки тока возбуждения генератора переменного тока.
Если перестановочное усилие, развиваемое чувствительным элементом регулятора, достаточно большое, то он сам осуществляет функции управления регулирующим органом. Такие регуляторы называются регуляторами прямого действия. Для достижения необходимой точности регулирования и увеличения перестановочного усилия между чувствительным элементом и регулирующим органом может устанавливаться усилитель - командный прибор (иногда называемый «пилотом»). Измеритель управляет усилителем, в котором за счет постороннего воздействия (энергии рабочей среды) создается усилие, передающееся на регулирующий орган.
Электронный регулятор постоянного напряжения. Преимуществами электромеханического регулятора являются. Долговременная стабильность тока нагрузки Постепенное опорного напряжения в диапазоне от нескольких десятых долей вольта. Эти регуляторы являются внешними по отношению к генератору переменного тока. Они имеют особенность работы в три цикла и с учетом технологии аккумуляторов для подзарядки.
Программируемый электронный контроллер таймера. Принцип: ручная регулировка позволяет определить длительность цикла поглощения в соответствии с емкостью аккумулятора. Эти данные затем интерпретируются с помощью компьютера, который выдает собственный источник опорного напряжения для каждой из трех фаз.
Исходя из закона регулирования, положенного в основу работы, регуляторы давления бывают астатические, статические и изодромные.
В системах газораспределения два первых типа регуляторов получили наибольшее распространение.
Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
Эти регуляторы всегда являются внешними и используются в дополнение к внутренним регуляторам для оптимизации циклов зарядки. Принцип: Технология аккумулятора запрограммирована вручную. Регулярно сканируется состояние заряда батареи, чтобы настроить ток возбуждения для применения оптимального цикла. Этот тип регулятора позволяет получить цикл зарядки, эквивалентный циклу зарядки самых современных док-погрузчиков. Про-цифровая модель работает в соответствии с этим принципом.
С развитием частоты применения регулирования диапазон предлагаемых регуляторов был расширен. Как только на рынке имеется достаточно широкий спектр регулирующих устройств, профессиональная общественность и клиенты нуждаются в инструменте для объективной оценки, чтобы они могли выбрать наилучшее возможное решение.
В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
Определяет различные типы контроллеров освещения. Оценивает экономию, достигаемую контроллером. Он оценивает параметры регуляторов, особенно в отношении центральных контроллеров, ввиду их способности экономить электроэнергию. Все устройства, которые позволяют изменять световой поток, называются световыми контроллерами. Устройства, которые реализуют его в каждом светильнике, называются отдельными контроллерами, устройства, которые делают его в центре источника питания, называются центральными регуляторами.
Стандарт требует, чтобы характеристические параметры были объявлены для контроллеров освещения, которые определяют, в частности, их эффективность и эффективность с точки зрения энергосбережения. Стандарт устанавливает 6 критериев оценки. В этом документе описываются 5 важнейших критериев.
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
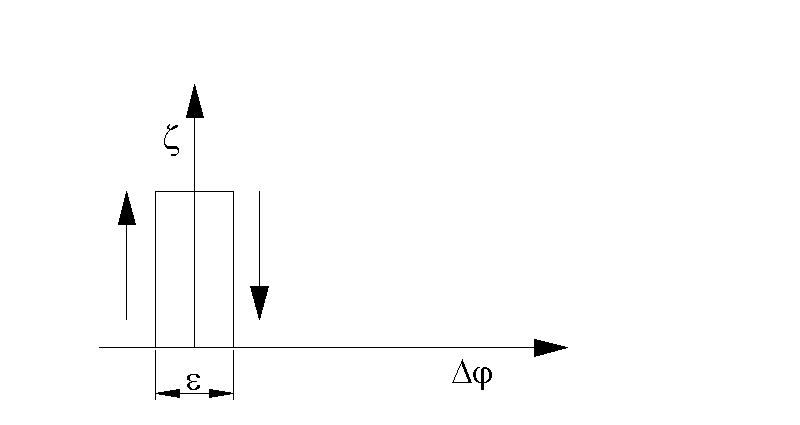
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Критерии оценки для всех контроллеров освещения. Означает, что контроллер может уменьшить световой поток. Первая категория этого критерия включает продукты низкого качества, которые стабилизируются, а не регулируют освещение. Типичным представителем второй категории являются переключаемые электромагнитные ПРА.
Выражает способность устройства устанавливать различные рабочие циклы и тем самым достигать более высокой энергоэффективности. Стандарт определяет 4 категории. В принципе, худшим является объект, где один и тот же цикл устанавливается каждый день в году. Лучше, если есть возможность изменить цикл в зависимости от времени года, времени, сезонных колебаний работы, временных интервалов и т.д. лучшие устройства работают с точным центральным реальным временем, они сложны, универсальны и переменны.
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
Критерии оценки только для регуляторов напряжения. Выражается отношением активной мощности на входе и выходе контроллера. В стандарте определены 3 категории. Устройства с КПД менее 96% не оцениваются, они считаются бедными. Выражается как процентное снижение эффективности контроллера при его 50% нагрузке. Стандарт идентифицирует 4 категории.
Общеизвестно, что эффективность электрических устройств измеряется при номинальной нагрузке. Регуляторы напряжения работают в основном с нагрузкой ниже 50% от номинального значения. Поэтому очень важно знать, как изменить эффективность контроллера при нагрузке 50%.
где k p – коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.
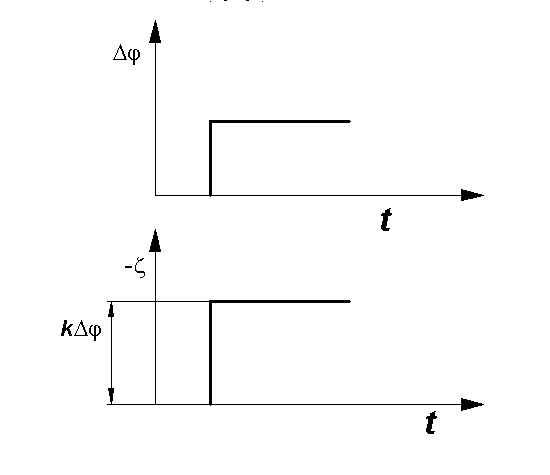
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:
Речь идет о стабилизации выходного регулируемого напряжения. Стандарт классифицирует оборудование по трем категориям. Необходимо четко определить, является ли это независимой стабилизацией каждой фазы отдельно, где блок управления должен быть установлен на каждом этапе, что гарантирует, что в этом отношении фаза не будет ограничена. Или, стабилизация всех фаз связана со средним значением фазового напряжения. Блок управления управляется только одной и всеми фазами одновременно, и такое оборудование, конечно, дешевле.
Это, в частности, ведет к другому регулируемому свету для отдельных светильников, которые при определенных обстоятельствах могут привести к неприемлемому изменению однородности освещения. Стандарт сравнивает отдельные устройства путем присвоения определенной отметки от 1 до 3 в соответствии с заданным критерием. После маркировки всех критериев производится оценка количества баллов, а самая низкая сумма считается лучшей.
Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
 ,
,
где Т и – время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Мы часто доверяем человеку более опытный или профессиональный сервис. Как уже упоминалось выше, регулятор может справиться с этим. Хотя водонепроницаемые регуляторы немного дороже, мы уверены, что они не будут повреждены при контакте с водой. Контроллеры также можно отличить благодаря: - датчику - регулятор в сочетании с двигателем датчика предлагает гораздо больше функций, чем бессенсорный контроллер. Контроллер датчика намного точнее, его работа более плавная, и благодаря соответствующему программному обеспечению мы можем вмешиваться в настройки регулятора.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
На рынке есть также регуляторы лодок. Конечно, нет ничего, что помешало бы вам использовать воздушный или автомобильный регулятор и адаптировать его самостоятельно к водяному охлаждению. Для этого используйте водяное охлаждение, например, оно предлагается компанией. Не забывайте о вертолетных регуляторах с возможностью программирования параметров, обеспечивающих плавный пуск или управление двигателем.
Мы уже знаем, что в моделировании есть несколько типов контроллеров скорости. Также стоит знать, что эти более продвинутые устройства позволяют программировать, но это тема для отдельной статьи. Расчет эффективности регулирования электронагревателей в системах отопления.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:
В настоящее время сертификатор становится лицом, знание которого должно охватывать все больше и больше вопросов. Поэтому на этот раз будут обсуждаться электротехнические устройства, которые являются регуляторами, используемыми для регулирования температуры комнат, нагреваемых с использованием электричества.
Пропорциональные контроллеры являются одними из самых простых в работе регуляторов. Принцип их работы заключается в том, что при изменении температуры в помещении генерируется пропорциональный управляющий сигнал, целью которого является поддержание выходной температуры на заданном уровне.
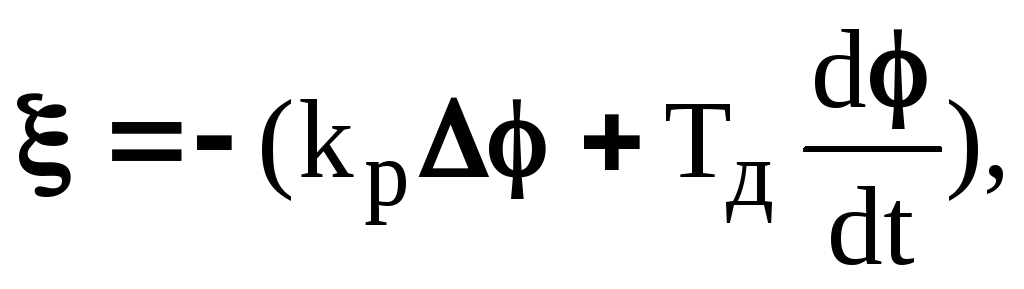
где Т д – время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:
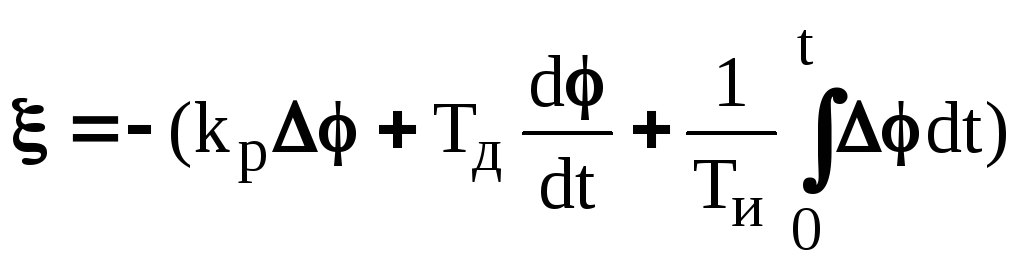
Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
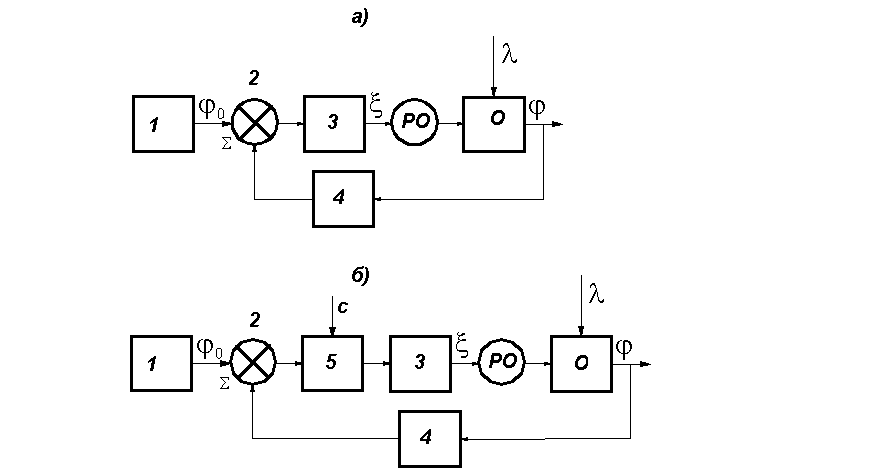
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О - объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
астатические регуляторы
статические регуляторы
программные регуляторы
двухпозиционные регуляторы.
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.
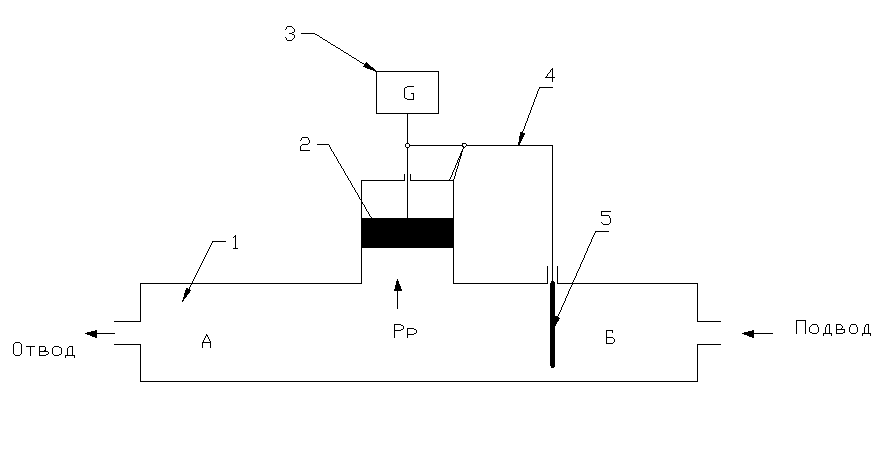
Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган)
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Р р и уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Р р, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.

Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 - передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган)
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.









