П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: "устройство регулирования () обеспечивающие на своем выходе регулируемого параметра, или его изменения, описываемую типа П, ПИ и т.д....... ". При этом:
Очень важное замечание - в подавляющем большинстве случаев эти регуляторы обеспечивают изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e ) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u . Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют "ошибкой" или "отклонением", Х - "заданным уровнем" или "заданным значением", причем Х , в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы "верхний" контур регулирования был "медленным" по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора , как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
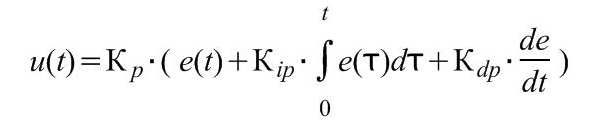
Передаточная функция ПИД регулятора описывается уравнением:
где "тау" - время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
Очевидно, что функция содержит 3 слагаемых, первое - пропорциональное к изменению заданного параметра, второе - интегральное, а третье - дифференциальное. В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : - величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: - величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: - величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку - если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
тут нет никакого подвоха, все то же самое, просто другая запись.
П,ПИ,ПИД,ПД ЗАКОН РЕГУЛИРОВАНИЯ.
Общее описание
Принцип ПИД-регуляторов
Для позиционных регуляторов процесс регулирования представляет собой колебания вокруг заданной точки. Естественно это связано с «релейной» статической характеристикой Y(U-X).
РЕГУЛЯТОРЫ
С ПИД-ЗАКОНОМ РЕГУЛИРОВАНИЯ
На рисунке показана линейная статическая Y(U-X) характеристика.
пропорционального регулятора
Если входная Е = U-X (невязка) и выходная величина сигнала регулятора Y связаны простым соотношением Y=K·(U-X), такой регулятор называется пропорциональным. Естественно что линейный участок статической характеристики не бесконечен, он ограничен максимально возможным значением выходной величины: Ymax. Например, при регулировании температуры воды в баке: Х — температура воды; U — заданное значение требуемой температуры; Y — выходной сигнал регулятора (мощность нагревателя, Вт); Ymax, например, 750 Вт. Если при максимальной мощности величина Е = 75оС, то К = 0,1оС/Вт.
При очень большом коэффициенте усиления К пропорциональный регулятор вырождается в позиционный с нулевой зоной нечувствительности. При меньшем значении К регулирование происходит без колебаний
(см.рис. 2).
П-регулятором при скачкообразном изменении
задания с 0 до U (разгонная кривая)
Отметим, что значение регулируемой величины Х никогда не достигнет задания U. Образуется, так называемая статическая ошибка: d (см. рис. 2). Действительно, при приближении температуры воды Х к заданию U постепенно уменьшается подаваемая мощность Y, т.к. Y=К·(U-X). Но теплота, рассеиваемая в окружающую среду, увеличивается, и равновесие наступит при Y = K·d и d не достигнет 0, т.к. если d будет равно 0, то и Y=0 и Х=0. Таким образом на выходе регулятора устанавливается некоторое значение Y=K·d , которое приводит регулируемую величину Х в состояние отличное от задания. Чем больше К, тем меньше d. Однако при достаточно большом К САР и объект могут перейти в автоколебания. Этот предельный коэффициент усиления определяется соотношением наклона разгонной кривой R и транспортным запаздыванием to объекта: Kmax = 2/(R·to) (см. рис. 2).
В ряде случаев, при малом транспортном запаздывании, статическая ошибка находится в необходимых пределах, поэтому П-регуляторы находят некоторое применение. Для устранения статической ошибки d при формировании выходной величины Y вводят интегральную составляющую отклонения от задания:
Y = K·(U-X) + In(U-X)/Ti ,
где Тi — постоянная интегрирования.
Таким образом, чем больше время, в течение которого величина Х меньше задания, тем больше интегральная составляющая, тем больше выходной сигнал. Регулятор с таким законом формирования выходного сигнала называется пропорционально-интегральным ПИ-регулятором.
В установившемся режиме (d=0) в интеграторе содержится величина In/Т, которая равна выходной мощности, требуемой для получения необходимой Х. Таким образом интегратор как бы находит статический коэффициент передачи объекта. Для достижения установившегося режима в интеграторе требуется достаточно большее время. Поэтому ПИ-регулятор можно применять в случае, когда и внешние воздействия достаточно медленные.
В случае резких изменений внешних и внутренних факторов (например, налили холодной воды в бак или резко изменили задание) ПИ-регулятору требуется время для компенсации этих изменений.
Для ускорения реакции САР на внешние воздействия и изменения в задании в регулятор вводят дифференциальную составляющую D(U-X):
Y = K·(U-X) + In(U-X)/Ti+Тd·D(U-X),
где Тd — постоянная дифференцирования.
Чем быстрее растет Е, тем больше D(U-X). Регулятор с таким законом управления называется ПИД-регулятором. Подобрав для конкретного объекта К,Тi и Td можно оптимизировать качество работы регулятора: уменьшить время выхода на задание, снизить влияние внешних возмущений, уменьшить отклонение от задания. При очень большом Тi регулятор очень медленно выводит объект на задание. При малом Тi происходит перерегулирование, т.е. регулируемый параметр Х проскакивает задание (рис.7), а затем сходится к нему. Ниже описаны методики настройки регуляторов, т.е. расчет коэффициентов в зависимости от динамических свойств объекта. Без настройки ПИ-регулятор может обладать худшим качеством работы, чем даже Т-регулятор. Приведем передаточные функции П-, ПИ- и ПИД-регуляторов, принятые в теории автоматического управления.
Пропорциональный регулятор – П:
y = К(u -x)
, т.е. в обратную связь заводится отклонение от уставки.
Пропорционально-Интегральный – ПИ:
y = (u-x)(Kp + /pTi)
, т.е. в обратную связь заводится также интеграл от отклонения, это позволяет избежать статической ошибки.
Пропорционально-Интегрально- Дифференциальный – ПИД:
y = (u-x)·(Kp + 1/pTi + p·Td)
, т.е. в обратную связь заводится также производная отклонения, это позволяет улучшить динамические характеристики регулятора.
Блок схема ПИД регулятора показана на рис. 3.
Структурная схема ПИД-регулятора
Величина рассогласования Е подвергается диференцированию и интегрированию. Выходная вели-чина — Y ПИД-регулятора формируется суммированием с весовыми коэффициентами дифференциальной, пропорциональной и интегральной составляющих. По наличию этих составляющих регуляторы и имеют сокращенное название П, ПИ, ПИД.
Существуют модификации ПИД-регуляторов:
а) при наличии интегратора на выходе или в исполнительном механизме (например сервопривод задвижки водяного отопления) ПД-регулятор как бы превращается в ПИ-регулятор, а вычислительная схема ПИД-регулятора требует двойного дифференцирования;
б) дифференциальная составляющая часто вычисляется только по Х, что дает более плавный выход на режим при изменении задания U.
Настройка регуляторов При применении ПИД- регуляторов для каждого конкретного объекта необходимо настраивать от одного до трех коэффициентов. Возможны САР с автоматизированной настройкой. Для типовых регуляторов известны простейшие аналитические и табличные методы настройки (например две методики Цидлера).
Настройка по реакции
на входной скачок
Алгоритм настройки:
— на вход САР подается новое задание (уставка) – нагреватель включается на максимальную мощность, и по переходному процессу X(t) определяются t0, R, tи (см. рис. 4):
Разгонная кривая для объекта с транспортным запаздыванием:
to — время транспортного запаздывания;
tи — постоянная времени (время согласования) определяется инерционностью объекта;
Xy — установившееся значение;
R — наклон разгонной кривой dX/dt (макс. скорость изменения Х)
— вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для П-регулятора К= 1/R·t0
для ПД-регулятора К= 1/R·t0, Td=0.25·t0
для ПИ-регулятора К= 0.8/R·t0, Ti= 3·t0
для ПИД-регулятора К= 1.2/R·t0, Ti= 2·t0, Td=0.4·t0.
Не обязательно выводить объект на максимально возможную величину Х. Однако, следует иметь в виду, что слишком маленький скачок не позволяет определить R с достаточно высокой точностью.
Настройка по методу максимального коэффициента усиления Этот способ применяется, если допустим колебательный процесс, при котором значения регулируемой величины значительно выходят за пределы задания U.
К настройке по методу максимального
коэффициента усиления
Алгоритм настройки:
— определяется предельный коэффициент Кмах усиления при котором САР и объект переходят в колебательный режим, т.е. без интегральной и дифференциальной части (Тd=0, Тi=Ґ). Вначале К=0, затем он увеличивается до тех пор, пока САР и объект переходит в колебательный режим. САР соответствует схеме П-регулятора (см.рис.2).
— определяется период колебаний tc (см. рис. 5);
для П-регулятора К= 0.5·Kмах
для ПД-регулятора К= 0.5·Кмах, Td=0.05·tc
для ПИ-регулятора К= 0.45·Кмах, Ti= 0.8·tс
для ПИД -регулятора К= 0.6·Кмах, Ti= 0.5·tс, Td=0.12·tc.
Настройка по процессу двухпозиционного
регулирования по релейному закону
К настройке по процессу двухпозиционного
регулирования
Эта методика удобна, если применялся Т-регулятор, который затем заменяется на ПИД- регулятор:
— система переводится в режим двухпозиционного регулирования по релейному закону (см. рис. 6);
определяется амплитуда — А и период колебаний tс;
— вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для П-регулятора К = 0.45/А
для ПД-регулятора К = 0.45/А, Td=0.05·tc
для ПИ-регулятора К = 0.4/А, Ti= 0.8·tc
для ПИД-регулятора К = 0.55/А, Ti= 0.5·tс, Td=0.12·tc.
Если объект не меняет структуру и свои параметры, то системы с ПИД-регуляторами обеспечивают необходимое качество регулирования при больших внешних возмущающих воздействиях и помехах, то есть близкое к 0 рассогласование Е (см. рис. 7). Как правило, точно согласовать параметры регулятора и объекта сразу не удается. Если Ti меньше оптимального в два раза, процесс регулирования может перейти в колебательный режим. Если Ti существенно больше оптимального, то регулятор медленно выходит на новый режим и слабо реагирует на быстрые возмущения — G. Таким образом, как правило необходима дополнительная подстройка. На рис. 7 показано влияние неоптимальных настроек ПИД-регуляторов на вид переходной функции (реакции САР и объекта на единичный скачок в задании).
по дисциплине "Автоматическое управление и средства автоматизации"
на тему "Структуры типовых регуляторов"
Курчатов 2008
Введение
Структуры типовых регуляторов
1. П-регулятор
2. ПД-регулятор
3. ПИ-регулятор
4. ПИД-регулятор
Заключение
Список литературы
Введение
Каждый контур регулирования обобщенно можно рассматривать как систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта.
Каждый регулятор можно охарактеризовать:
– законом, на основе которого осуществляется регулирование;
– типами входных сигналов (первичных датчиков);
– типами выходных сигналов управления (исполнительных устройств);
– способом задания установки регулирования;
– дополнительными возможностями (дополнительные функции, дополнительные входы/выходы).
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы.
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
Структуры типовых регуляторов
1. П -регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
W р (р) = 1 ⁄ W о.с (р); W р (iщ) = 1 ⁄ W о.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора x р = K р y*, необходимо выполнить условие:
W о.с (р) = X о.с (р) ⁄ x р (р) = 1 ⁄ K р (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи k о.с = д = 1 ⁄ K р называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (K р), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.
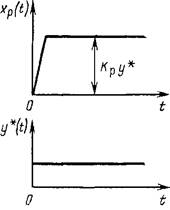
Рис. 2. Кривая переходного процесса П-регулятора
2. ПД -регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором - дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.

Рис. 3. ПД-регулятор: а - структурная схема; б - кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель- привод - обратная связьформируется П-закон регулирования с коэффициентом усиления K р . Динамическая характеристика реального ПД-регулятора имеет вид
Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит K р (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления К д и постоянная дифференцирования Т д , произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
3. ПИ-регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя К у. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (K y -W o . c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
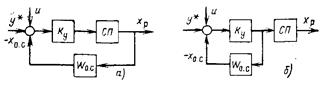
Рис. 4. Структурные схемы ПИ-регуляторов:
а - сервопривод охваченООС;б- сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора
Если принять Т д =Т и и K р =1/K д, получим
 т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
W p (p) = W КУУ (p)W с.п (p), (3.3), гдеW КУУ (p) = 1 ⁄ W о.с (р).
При использовании сервопривода с передаточной функцией интегрального звена W с.п (p) = 1⁄ T Р передаточная функция регулятора имеет вид
При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/W о.с (р) = W КУУ (р) = K р (1+T Р) (3.5)
что обеспечивает обратная связь с оператором
W о.с (р) = K о.с /(1+T Р) = д/(1+T Р) (3.6)

Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате К у такой обратной связью оператор регулятора в целом имеет вид
W р (р) = K р (1+1/T иР)
Параметрами настройки ПИ-регулятора служат K р и Т и.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), W о. c (p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Т и численно равна подкасательной Т д к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления- органы настройки для изменения K р (д) и Т и в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения К р и T и можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
K р = x р1 /y* (3.7)
а Т и численно равно времени, необходимому для перемещения выходного вала сервопривода из положения x р1 до его удвоенного значения 2х р1 . Отсюда второе название T и - время удвоения выходного сигнала ПИ-регулятора x р при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что К р /Т и определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном увеличении Т и второй член в
 последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де -
t
/
T
и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де -
t
/
T
и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
W р (р) = K р +K р /T иР +K д T дР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x* р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
Заключение
Автоматические регуляторы, помимо высокой надежности, должны обладать высокой чувствительностью к изменениям входного сигнала, необходимой для точного поддержания регулируемых величин вблизи заданного значения. Для этого в составе регулятора предусматривается специальное измерительное устройство. Кроме того, автоматический регулятор должен развивать на выходе усилие, необходимое для перемещения регулирующих органов (клапанов, задвижек, шиберов), т. е. содержать в своей структуре достаточно мощный исполнительный механизм (сервопривод).
Для реализации выбранного закона регулирования и изменения параметров настройки регулятора в необходимых пределах в его состав должны входить устройства формирования закона регулирования и изменения (коррекции) параметров настройки. Необходимо также иметь возможность изменения в широких пределах заданного значения регулируемой величины, с которым сравнивается ее текущее значение. Это требование предусматривает наличие задатчика ручного или автоматического управления (ЗУ) в составе регулятора. Выполнение перечисленных требований возможно лишь при использовании автоматических регуляторов непрямого действия.
Список литературы
Плетнев Г.П. Автоматическое управление и защита теплоэнергетических установок электростанций: Учебник для техникумов. – 3-е изд., перераб. – М.: Энергоатомиздат, 1986.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд-во «Наука», 1966.
Михайлов В.С. Теория управления. – К.: высш. шк. Головное изд-во,1988.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. И доп. – К.: высш. шк. Головное изд-во, 1989.
1.5. Регуляторы и законы регулирования.
Регулятором называют полнофункциональное, конструктивно оформленное в виде отдельного блока физическое устройство . Это устройство имеет вход для получения сигнала с датчика управляемой величины объекта управления, выход для подачи сигнала управления на исполнительный механизм САР, пульт для задания человеком-оператором требуемого поведения САР или систему связи с компьютером, управляющим технологическим процессом. Наконец, такой физический регулятор имеет устройство, вырабатывающее сигнал управления на основе задания, текущего значения управляемой величины и, м.б. возмущения, и заданного алгоритма обработки этих сигналов. Многие технические регуляторы реализуются на основе микроконтроллеров. Кроме того, бывает, что в состав технического регулятора включают и исполнительный механизм (ИМ), и регулирующий орган (РО). Такой регулятор достаточно подключить к объекту управления, чтобы получилась САР.Рис. 1.25. Автоматический регулятор напряжения APC Line-R 600 ВА. Система модульных компонентов LOVATO Electric
В ТАУ регулятором называют структурный алгоритмический блок , расположенный на функционально-структурной схеме стразу за устройством сравнения задания и управляемой величины (сумматором) (рис.1.26). Этот блок преобразует по заданному алгоритму сигнал ошибки в сигнал, подаваемый на модель исполнительного механизма (ИМ) для управления последней.

Рис. 1.26. Регулятор САР с управлением по отклонению в ТАУ это часть технического регулятора Т.о. в технике регулятор это физический функциональный блок, а в ТАУ в САР с управлением по отклонению регулятор это алгоритм преобразования сигнала ошибки в сигнал управления. В САР с комбинированным управлением по отклонению и возмущению регулятор реализует алгоритм преобразования сигналов ошибки и возмущения в сигнал управления. Законы регулирования это математические алгоритмы, в соответствии с которыми в САР с управлением по отклонению сигнал ошибки слежения (отклонение), преобразуется в сигнал управления, подаваемый на исполнительный механизм САР или непосредственно на объект управления, если ИМ и РО включены в состав модели последнего. Законы регулирования позволяют САР решать возложенные на нее задачи: осуществлять слежение и стабилизацию с требуемым качеством. Наиболее часто используются на практике регуляторы, реализующие П-, ПИ- и ПИД- законы регулирования (пропорциональный, пропорционально-интегральный и пропорционально – интегрально - дифференциальный). П - регулятор - это регулятор, реализующий простейший пропорциональный закон регулирования. Функционально он представляет собой безинерционный усилитель, а структурно – алгоритмически это пропорциональное звено (рис. 1.27) Т.о. П – регулятор просто усиливает сигнал ошибки в некоторое число раз. Важность П – регулятора определяется тем, что в статических САР, где он используется, изменяя его коэффициент усиления можно не только добиться устойчивости САР, но и оптимизируя значение этого коэффициента оптимизировать и качество всей САР. Однако, получить требуемые или просто хорошие показатели качества САР с помощью одного только П - регулятора удается далеко не всегда.

Рис. 1.27. П - регулятор, его передаточная и переходная функции
ПИ – регулятор . Выходной сигнал ПИ-регулятора пропорционален взвешенной сумме входного сигнала и интеграла от него (см. рис. 1.28). В соответствии с этим алгоритмом строится так называемая параллельная модель ПИ-регулятора. Часто используется и альтернативная эквивалентная модель, представляющая собой последовательное соединение интегратора и форсирующего звена (см. рис. 1.28). ПИ – регулятор обладает двумя важными достоинствами. Во-первых, введение его в статическую САР вместо П - регулятора превращает САР в астатическую, что улучшает качество регулирования в установившемся режиме. Во-вторых, ПИ – регулятор позволяет посредством форсирующего звена, входящего в его состав, в существенной мере компенсировать на высоких частотах инерционность, вносимую интегратором, и сохранить качество переходного режима исходной статической САР, в частности ее быстродействие. Т.о. ПИ – регулятор простыми средствами одновременно улучшает качество установившегося режима работы исходной статической САР, и сохраняет качество переходного, чем и обусловлено широкое распространение таких регуляторов.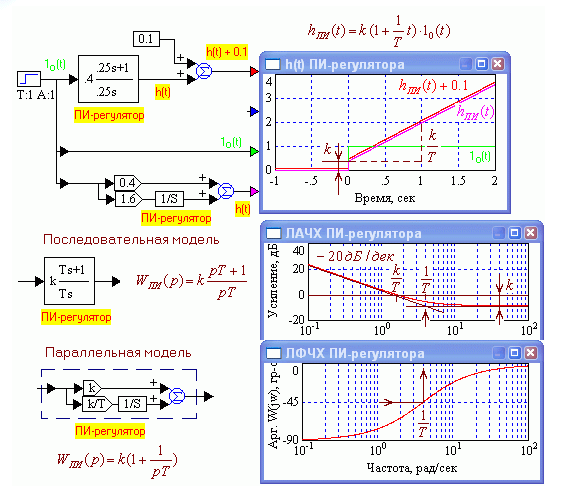
Рис. 1.28. ПИ - регулятор, его передаточные и переходные функции и частотные характеристики
Как видно на рис. 1.28, на низких частотах ПИ-регулятор ведет себя как интегратор, а на высоких – как пропорциональное звено. Тем самым при правильной настройке ПИ-регулятора улучшаются свойства САР в установившемся режиме и сохраняются свойства переходного режима, т.е. быстродействие и точность ПИ – регулятор не только усиливает сигнал ошибки, как это делает П – регулятор, но и благодаря наличию интегратора накапливает его со временем. Это позволяет САР с ПИ – регулятором работать в установившемся режиме при отслеживании постоянных заданий с нулевой ошибкой (. Другими словами, САР с ПИ-регулятором – астатическая. ПИД–регулятор. Выходной сигнал ПИД-регулятора пропорционален взвешенной сумме входного сигнала, интеграла от него и его производной (см. рис. 1.29). В соответствии с этим алгоритмом строится так называемая параллельная модель ПИ-регулятора. Часто используется и эквивалентная альтернативная модель, представляющая собой последовательное соединение интегратора и двух форсирующих звеньев (см. рис. 1.29). Назовем такие модели идеальными. Примечание . Если рассматривать ПИД-регулятор как математический алгоритм обработки поступающего на него сигнала, то он, естественно, может быть реализован в виде вычислительной процедуры. Но если потребуется построить реальное устройство с такими динамическими характеристиками, то выяснится, что точная его реализация не возможна, поскольку реализуемость линейного динамического объекта требует, чтобы степень его характеристического полинома (знаменателя передаточной функции) была бы не меньше числителя передаточной функции. Поэтому и Vissim не позволяет построить идеальную последовательную модель ПИД-регулятора только с помощью блока transferFunction (Передаточная функция). Если все-таки в Vissim’е требуется использовать именно реализуемую последовательную модель, то можно дополнить знаменатель передаточной функции сомножителем в виде полинома первого порядка с относительно малой постоянной времени, намного меньшей, чем постоянные времени ПИД-регулятора и, желательно, меньшей хотя бы на порядок, чем наименьшая постоянная времени неизменяемой части САР.
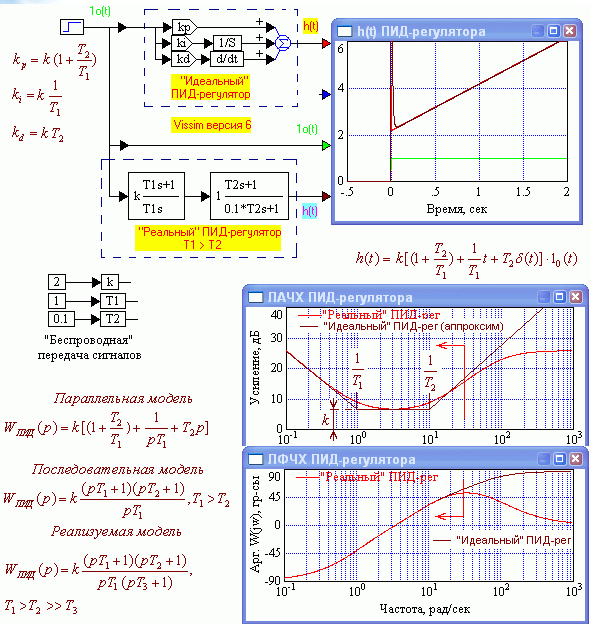
Рис. 1.29. Три модификации ПИД – регулятора
«Реальный» ПИД - регулятор выполняет свои функции только при сигналах, спектр которых ограничен сверху, т.е. для достаточно медленных сигналов (красные стрелки). Этот диапазон может быть расширен до требуемой величины уменьшением вспомогательной постоянной времени Т 3 . ПИД – регулятор поднимает усиление одновременно на низких и на высоких частотах. Он более энергично, чем ПИ – регулятор реагирует на быстрые изменения входных сигналов, что видно на переходной функции. В результате улучшается и быстродействие САР, и качество ее установившегося и переходного режимов.
1.6. Методы оптимизации САР.
Математически оптимизация САР сводится к минимизации функции стоимости путем определения (например, подбором) наилучших значений и сочетания параметров, характеризующих САР. Разработан целый ряд аналитических методов оптимизации, алгоритмов, которые сводятся к определению значений параметров, при которых функция стоимости становится минимальной. Например, в программе Vissim можно применить на выбор методы Пауэлла, Флетчера-Ривза, Полака-Рибейры и др. Основная идея алгоритмических методов оптимизации состоит, во-первых, в таком малом изменении предварительно заданных приближенных значений параметров, при котором функция цены плавно и последовательно уменьшается, пока не достигает минимума (метод кратчайшего спуска). Так можно определить ближайший к начальным значениям параметров минимум. Но этот минимум цены в зависимости от выбора начальных значений параметров может оказаться вовсе не самым малым, глобальным, а локальным. Во-вторых, если не только не известно приближенное значение параметров, близких к минимуму цены, но даже неизвестно, имеется ли минимум вообще, то приходится перебирать значения параметров в очень широких диапазонах, с последующим уточнением расположения минимума функции цены. Такой алгоритм в случае нескольких минимумов функции цены может случайным образом привести к любому из них. Случается, что, при решении задач оптимизации исследователь не знает ни количество локальных минимумов, ни достаточно близких к разыскиваемому минимуму значений параметров. Для правильного решения задачи приходится применять метод проб и ошибок, задавая разные начальные значения параметров, определяя минимум функции цены и сравнивая получаемые результаты один с другим и с требованиями задания на проектирование САР. Из методов оптимизации ниже рассмотрен приближенный метод, основанный на получении начальных значений настроечных параметров регуляторов посредством анализа ЛАЧХ разомкнутого контура САР, с последующим уточнением этих значений методом проб и ошибок, а также методы автоматической оптимизации в программах моделирования, в частности Vissim. Определение и экспериментальное уточнение настроечных параметров регуляторов САР. Общая идея предлагаемой ниже методики параметрической оптимизации, основывается на предварительном определении приближенных значений настроечных параметров регуляторов по ЛАЧХ неизменяемой части САР, с последующим уточнением их значений методом проб и ошибок (см. рис. 1.23). При таком методе оптимизации, будет ли она выполняться компьютером или экспериментально и вручную, важно для сокращения работы подобрать начальные значения параметров по возможности близкие к их оптимальным значениям, если такие существуют. 1. Настройка П – регулятора. Приближенное определение коэффициента усиления П–регулятора статической САР называется ее предварительной коррекцией . Первым шагом коррекции является проверка устойчивости и, при необходимости, стабилизация разомкнутого контура САР с получением запаса его устойчивости по амплитуде в 12 – 20 дБ. Примечание . Если разомкнутый контур состоит из устойчивых звеньев (типовых звеньев до второго порядка включительно), что, как правило, и бывает, то причиной его неустойчивости является наличие внутренних контуров. Стабилизировать эти контура можно в моделирующих программах уменьшением коэффициента усиления этих контуров в 4 – 10 раз, после предварительного выведения их на границу устойчивости уменьшением коэффициента усиления контура. Установление факта приведения САР на границу устойчивости осуществляется по виду переходной функции, которая на границе устойчивости содержит колебательную компоненту, амплитуда которой медленно увеличивается со временем на протяжении многих периодов этих колебаний. Предварительная коррекция заключается в обеспечении путем варьирования коэффициента усиления контура исходной САР (т.н. неизменяемой части САР, см. например рис. 2.1 или 2.3) во-первых, запасов устойчивости
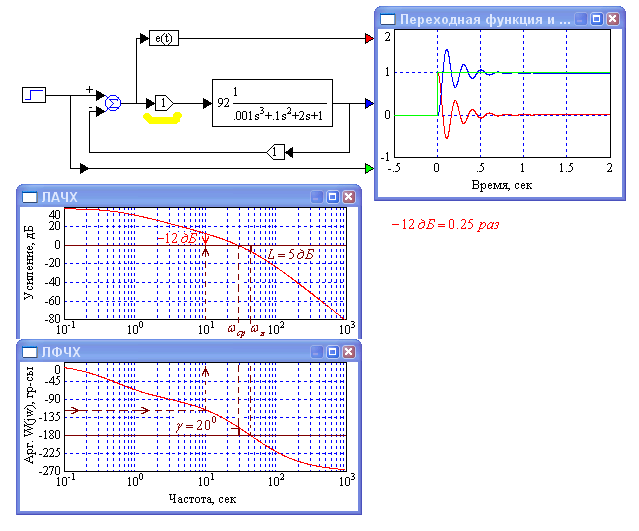

Рис. 1.30. Переходные функции замкнутых САР, ЛАЧХ и ЛФЧХ для их разомкнутых контуров
Примечание . Можно было выразить математически перерегулирование замкнутой САР как функцию коэффициента усиления и отыскивать минимум этой функции. Но математические выкладки получаются чрезмерно громоздкими для инженерного решения задачи, поэтому экспериментальный метод последовательных приближений в моделирующей программе является на сегодня более легким и поэтому предпочтительным. 2. Настройка ПИ– регулятора. Если при оптимизации коэффициента усиления статической САР, рассмотренной в предыдущем пункте, не удается получить САР с хорошими показателями качества (САР имеет большие ошибки в установившемся режиме вследствие малого усиления контура на нижних частотах), то приходится изменять структуру регулятора, заменяя П–регулятор на ПИ-регулятор. Поскольку САР с ПИ-регулятором является астатической, то для предварительной ее коррекции достаточно обеспечить точно такие же, как и ранее, запасы устойчивости по фазе 45 0 – 70 0 , лучше всего 60 0 , по амплитуде 12 – 20 дБ (4 – 10 раз), лучше 18 дБ, путем изменения коэффициента усиления контура. Поскольку ПИ-регулятор содержит интегратор, то САР с ним обязательно является астатической. Поэтому требований к величине коэффициента усиления контура с точки зрения обеспечения качества работы САР в статике, в отличие от статической САР, не предъявляется. Обеспечить требуемые запасы устойчивости можно в различной последовательности, но предпочтительнее сделать следующим образом. 1. В исходной статической САР, варьируя коэффициент усиления П-регулятора обеспечить запас устойчивости по фазе в 60 0 – 70 0 или больше в соответствии с рис. 2.9, и запас устойчивости по амплитуде не менее 12 дБ. 2. По ЛАЧХ разомкнутого контура только что скорректированной САР определить оптимальное значение постоянной времени Т ПИ-регулятора (рис.1.31). Искомая постоянная времени обратно пропорциональна частоте сопряжения отрезков аппроксимации САР с наклонами 0 и – 20 дБ/дек. В данном примере Т = 1/0.5 = 2.0 сек.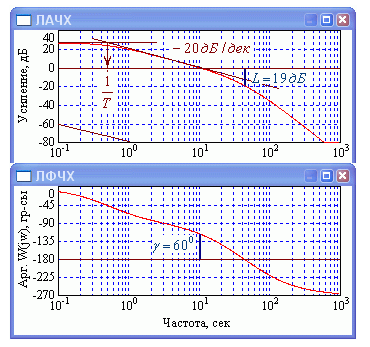
Рис. 1.31. Определение постоянной времени ПИ-регулятора по ЛАЧХ разомкнутого контура
3. Начальное значение коэффициента усиления ПИ-регулятора выбрать равным k = 0.5. В результате, с учетом коэффициента усиления П-регулятора (kп = 0.25) передаточная функция ПИ-регулятора и схема САР примут вид, показанный на рис.1.32.
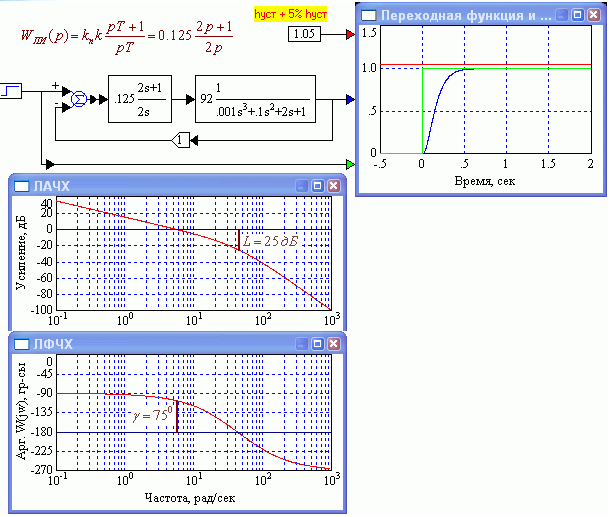
Рис. 1.32. Приближенная настройка ПИ-регулятора
Как видно, переходная характеристика удовлетворительна, а запасы устойчивости слегка завышены, поэтому перерегулирование равно нулю. Исходное приближение вполне удовлетворительное, но быстродействие САР может быть несколько повышено. Оптимизация значения коэффициента усиления ПИ–регулятора . В общем случае для ПИ-регулятора оптимизацию следует осуществлять по обоим его параметрам: коэффициенту усиления k и постоянной времени T . Это трудоемкая работа для выполнения вручную. Поэтому далее можно ограничиться лишь оптимизацией коэффициента усиления, считая, что постоянная времени T определена с удовлетворительной точностью. Остается методом проб и ошибок, изменяя коэффициент усиления ПИ-регулятора добиться 5%-ого или чуть меньшего перерегулирования σ. На рис. 1.33 показана оптимизированная модель САР с ПИ-регулятором. Перерегулирование составляет 5%. Это обеспечивает минимальное время регулирования для тех объектов, которым противопоказана излишняя колебательность, сопровождающаяся знакопеременными динамическими нагрузками
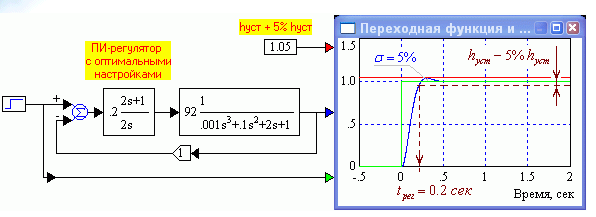
Рис. 1.33. Оптимизированная модель САР с ПИ-регулятором.
3. Настройка ПИД – регулятора. Использование ПИД-регулятора позволяет повысить быстродействие САР в переходном и установившемся режимах по сравнению с САР такой же неизменяемой частью, в которой используется ПИ-регулятор. Приближенное определение настроечных параметров ПИД-регулятора. Поскольку САР с ПИД-регулятором является астатической, то для предварительной ее коррекции достаточно обеспечить такие, как и ранее для ПИ-регулятора, запасы устойчивости
Рис. 1.34. Постоянные времени ПИД-регулятора
После определения постоянных времени ПИД-регулятора следует принять коэффициент усиления k=0.5 (значение получено эмпирическим путем), вычислить и задать коэффициенты усиления ветвей регулятора и построить переходную характеристику полученной САР (рис.1.35). Время регулирования составляет 0.09 сек, перерегулирование равно нулю. Как видно, качество САР уже неплохое. Внизу рис.1.35 показан состав блока дифференцирования, собранного в программе Vissim
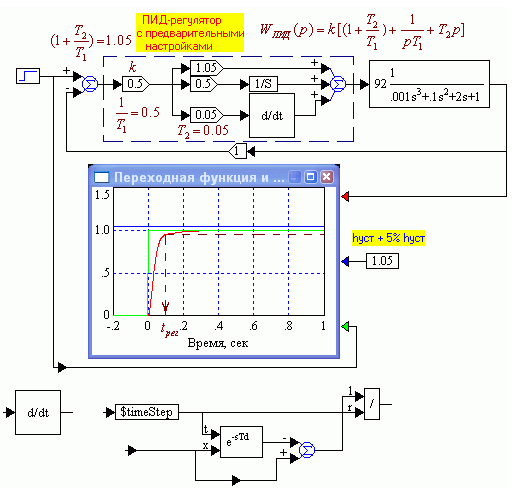
Рис. 1.35. САР с предварительными настройками параметров ПИД-регулятора.
Оптимизация значения коэффициента усиления ПИД–регулятора. Поскольку у предварительно скорректированной САР (рис. 1.35) перерегулирование отсутствует, то это свидетельствует о потенциальной возможности повышения ее быстродействия без заметного ухудшения максимальных значений ошибок переходного режима. Для этого методом проб и ошибок изменением коэффициента усиления регулятора добьемся перерегулирования равного 5%. Рис. 1.36 показана САР с оптимальной настройкой коэффициента усиления ПИД-регулятора, выполненной вручную. Оптимальное значение, подобранное вручную методом проб и ошибок равно k = 0.85. Время регулирования оптимизированной САР составляет 0.04 сек, что в два раза быстрее, чем у САР на рис. 1.35.
Рис. 1.36. САР с оптимальной настройкой коэффициента усиления ПИД-регулятора.
4. Сравнение эффективности регуляторов. Рассмотрим переходные функции САР, имеющих одинаковые неизменяемые части и с оптимальными настройками П-, ПИ- и ПИД- регуляторов, полученными с использованием ЛАЧХ и метода проб и ошибок (рис.1.37).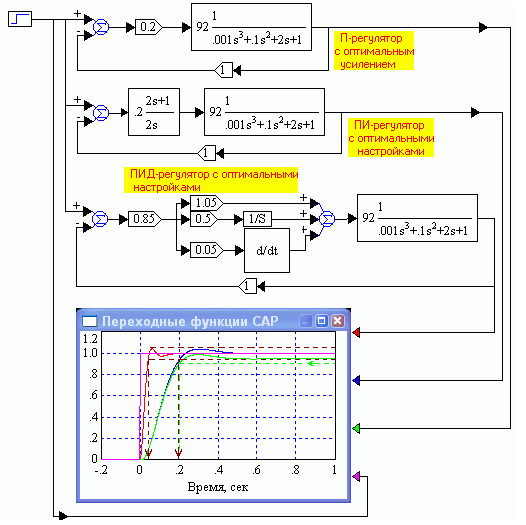
Рис.1.37. Сравнение САР с оптимальными настройками П-, ПИ- и ПИД- регуляторов
Как видно, оптимальный ПИ-регулятор дает САР равную по быстродействию САР с П-регулятором, но превосходящую ее нулевой ошибкой слежения в статике (при отслеживании постоянной величины). ПИД-регулятор в данном случае дает САР намного, в пять раз, превосходящую обе других по быстродействию, хотя колебательность такой САР проявляется в большей мере. Это, впрочем, при необходимости легко поправить небольшим уменьшением коэффициента усиления. Установившаяся ошибка САР с ПИД-регулятором, как и у САР с ПИ-регулятором, естественно, равна нулю. Итак, ПИ-регулятор позволяет САР управлять объектом «мягче», а ПИД-регулятор – энергичнее. Оба они дают нулевую ошибку слежения в статике, в отличие от малой, но не нулевой ошибки САР с П-регулятором. Пояснение . Время регулирования t рег оптимизированной САР определяется частотой среза ее ЛАЧХ: t рег = (1 - 5)/ ω ср. При оптимальной настройке регулятора частота ω 20-40 сопряжения линейных отрезков аппроксимации ЛАЧХ с наклонами -20 и -40 дБ/дек близка к частоте среза ω ср и несколько, примерно на октаву, превышает ее. Поэтому фактически время регулирования САР косвенно определяется этой частотой сопряжения. Частота ω 20-40 , в случае оптимальной настройки П- и ПИ- регуляторов равна или близка к величине, обратной второй по величине постойной времени неизменяемой части САР. В случае опт. настройки ПИД-регулятора частота ω 20-40 аналогично определяется третьей по величине постоянной времени неизменяемой части, поскольку ПИД-регулятор компенсирует две старшие инерционности своими форсирующими множителями. Поэтому время регулирования оптимизированных САР с П- и ПИ- регуляторами примерно одинаково, а с ПИД-регулятором оно может быть значительно меньше, если третья по величине постоянная времени значительно меньше второй. Это положение показано на рис. 1.38. Быстродействие САР с П- и ПИ-регуляторами одинаково и определяется второй по величине постоянной времени неизменяемой части САР (t рег =1/ω ср ПИ =2/ ω 20-40 ПИ =2·Т 2), а быстродействие САР с ПИД-регулятором выше и определяется третьей по величине постоянной времени неизменяемой части САР (t рег =1/ω срПИД =2/ω 20-40 ПИД =2·Т 3). То же самое можно проиллюстрировать аналитически (рис.1.39). Форсирующий множитель ПИ-регулятора компенсирует наибольшую постоянную времени неизменяемой части САР (объекта управления), но одновременно вносит инерционность интегратора с той же постоянной времени. Поэтому длительность переходных процессов САР с П- и ПИ-регуляторами примерно одинакова, но САР с ПИ-регулятором становится астатической.
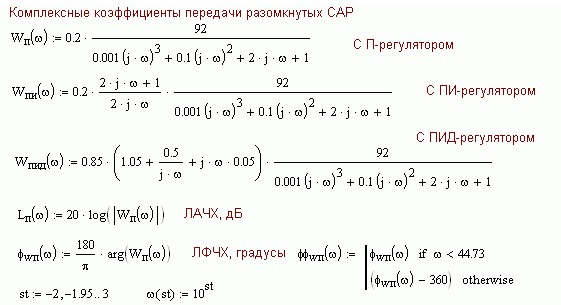
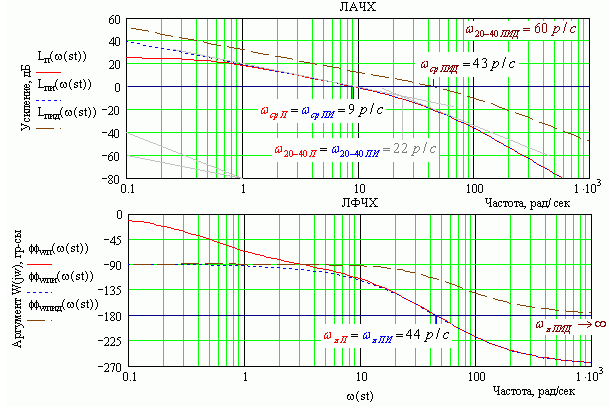
Рис. 1.38 ЛАЧХ и ЛФЧХ оптимизированных САР с П- ПИ- и ПИД-регуляторами.
Форсирующие множители оптимального ПИД-регулятора компенсируют две наибольшие инерционности неизменяемой части САР. В то же время, ПИД-регулятор вносит в контур инерционность интегратора с постоянной времени, равной наибольшей постоянной времени объекта управления. В итоге длительность переходного процесса САР с ПИД-регулятором значительно короче, чем у САР с П- и ПИ-регуляторами, при условии, что постоянные времени объекта управления значительно отличаются.

Рис. 1.39. Характеристики переходного процесса САР с ПИД-регулятором
Соотнесем переходные характеристики полученных выше САР и переходную характеристику ее неизменяемой части. Видно из рис. 1.40, что быстродействие САР порядка на два лучше, чем время разгона объекта управления. Объясняется это сильным отличием главной и следующей за ней постоянных времени неизменяемой части, наличием контура управления и форсирующих множителей в ПИД-регуляторе.


Рис.1.40. Переходные функции объекта управления и САР
Отметим, что структурные модели линейных САР, рассматриваемые в ТАУ, в частности, рассмотренные выше, как правило, не учитывают в явной форме закон сохранения энергии . Конечно, модели предполагают, что она сохраняется, но откуда она берется и как преобразуется, какая мощность требуется для управления объектом, не рассматривается и в явном виде не описывается. Например, для работы усилительного (пропорционального) звена требуется подведение извне энергии, но на структурных схемах, как правило, это не показывается. Кроме того, линейные системы по определению не описывают такие явления, как ограничение мощностей, потребляемых и вырабатываемых элементами САР, в частности, объектами управления. Поэтому рассмотренные выше модели в равной мере описывают реакцию линеаризованной модели САР как на относительно малое приращение задания, соответствующее единичному скачку на ее входе, так и на огромное изменение. В этом и состоит особенность, достоинство и ограниченность линейных моделей систем управления. Примечание . При необходимости можно построить и модель, учитывающую в явном виде требуемые для управления мощности. Но такая модель должна будет учитывать ограничение создаваемых и потребляемых в элементах САР мощностей, а следовательно она будет нелинейной, что выводит нас из класса рассматриваемых в данной работе линейных систем. Рассмотрим физическую природу объекта управления (неизменяемую часть САР). Предположим, что основу неизменяемой части САР составляет инерционный объект управления, например, двигатель постоянного тока, приводящий в движение некоторую машину. По разгонной характеристике рис. 1.40 видно, что время его разгона составляет примерно 6 сек (в три раза больше, чем главная постоянная времени, равная 2 сек, см. знаменатель передаточной функции на рис. 1.40). Но как видно на рис. 1.40 синтезированная САР заставит двигатель разгоняться от нулевой до номинальной частоты, в зависимости от типа регулятора за 0.2 сек и даже за 0.04 сек, т.е. примерно в 100 раз быстрее! Формально такую ситуацию, с подачей на двигатель мощностей, многократно больших его номинальной, представить можно, но на практике это наверняка приведет к перегрузке и выходу из строя, как системы электропитания, так и самого двигателя. В то же время, если единичная ступенька на входе САР соответствует разгону двигателя на малую величину, например на 1 рад/сек, с частоты 500 рад/сек до 501 рад/сек, то такое незначительное увеличение может потребовать вовсе не запредельного увеличения мощности, подаваемой на двигатель. В этом случае САР действительно способна реагировать в сто раз быстрее. Итак, следует различать время разгона объекта, когда его управляемая величина должна измениться от нуля до номинала и время регулирования САР, когда речь идет об относительно малых приращениях задающей, а следовательно и управляемой величин, не требующих подведения к объекту запредельных значений мощностей. Оценка времени регулирования при анализе САР и предполагает наличие относительно малых изменений задания. Отметим, что объект управления работает в технологической цепочке. При этом, включение и выключение его из работы, а значит и остановка и разгон, проводятся относительно редко, в то время, как стабилизация и слежение осуществляются большую часть времени. Отсюда и значимость оценки и минимизации времени регулирования , в течение которого ошибка слежения и стабилизации может превышать допустимую, снижая качество продукции. Таким образом, после теоретического синтеза модели САР, а еще лучше, до этого, следует определить и задать в ней ограничения на управляющие воздействия. Это приведет к тому, что время разгона от нуля до номинала управляемой величины будет определяться объектом управления, равно ему или слегка меньше, а реакция САР на малые изменения задающей величины будет значительно более быстрой. Тем не менее, если на мощность управляющих величин не накладывается ограничений, результаты рис. 2.16 можно рассматривать как вполне корректные при любых значениях скачка задания от нуля до номинала: время разгона САР можно сделать таким же, как время регулирования. Это может быть, например, в маломощных фотоэлектронных системах слежения, системах ФАПЧ, электрических схемах и т.п., где мощность этих сигналов мала.
ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины. Если добавить к алгоритму дифференциальную составляющую - он трансформируется в .
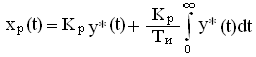
ПИ-регулятор. Формула выходного сигнала:
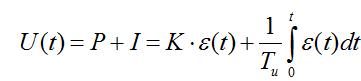
ПИ-регулятор. Передаточная функция:
W(p)= K(1+1/Tи*s) или W(p)= K+1/Tи*s;
Из формулы видно, что п-составляющая складывается с накопленной и-составляющей за время t. Фактически, ПИ-регулятор «учится» на предыдущем опыте. Если система не испытывает внешних возмущений – регулируемая величина стабилизируется на заданном значении: П-составляющая будет равняться 0, а интегральная составляющая полностью обеспечит выходной сигнал.
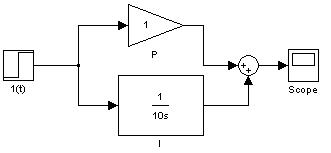
ПИ-регулятор можно получить – параллельным. Составим в MatLab схему из двух параллельно соединенных звеньев – к и 1/Ти. Дадим запаздывание в 1 секунду, чтобы увидеть выход в начальный момент времени.
Рассмотрим ПИ-регулятора. Переходная характеристика – реакция на единичное ступенчатое возмущение. Смоделируем в среде MatLab несколько переходных процессов для различных ситуаций.
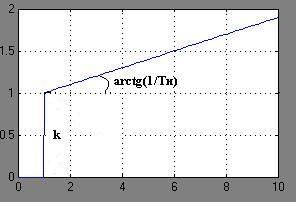
С графика видно, что переходная характеристика ПИ-регулятора состоит из сложенных пропорциональной и интегральной. Чем больше к, тем больше будет пропорциональный заброс на графике.
Рассмотрим на примере нескольких Ти на ПИ-регулятор, его выход и вид переходного процесса. Смоделируем несколько параллельных процессов с выводом на один Scope с помощью Mux.









