Регулятор - устройство, которое следит за работой объекта управления и вырабатывает для него управляющие(регулирующие) сигналы.
Регуляторы могут быть выполнены в виде отдельного устройства или в виде прикладного пакета в основной программе управляющего устройства.
Аппаратные регуляторыможно разделить:
1.по использованию для работы внешней энергии:
регуляторы прямого действия, не используют внешнюю энергию. Работают за счёт энергии развиваемой датчиком, просты по конструкции, не дороги, но имеют не высокую точность. Используют в простейших системах регулирования.
регуляторы не прямого действия,используют внешнюю энергию для своей работы-это основной вид регуляторов.
2.по виду используемой внешней энергии:
3.по виду регулируемого параметра: регуляторы температуры, давления, уровня, расхода и т. д.
4.по закону регулирования, т.е. по изменению регулирующего воздействия во времени при изменении регулируемого параметра(по виду переходной характеристике регулятора). Эти регуляторы могут быть аппаратного типа(аналоговые) и дигитальные, в виде программного пакета.
Различают следующие виды регулирований:
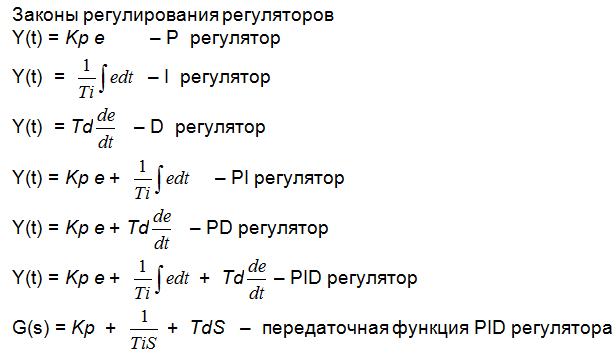
Свойства и типы регуляторов
1. P-регулятор , пропорциональный регулятор.
Передаточная функция P-регулятора: Gp(s) = Kp. Pегулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка e, тем больше управляющее воздействие Y= Kp*e).
2. I-регулятор , интегрирующий регулятор.
Передаточная функция I-регулятора: Gi(s) = 1/Ti*s. Управляющее воздействие пропорционально интегралу от ошибки е:
3.
D
-регулятор
,
дифференцирующий регулятор.
Передаточная функция
D
-регулятора:
G d
(
s
) =
T d
*
s
.
D
регулятор
создаёт управляющее воздействие только при изменении регулируемой величины:
Y
=
T d
*
de
/
dt
.
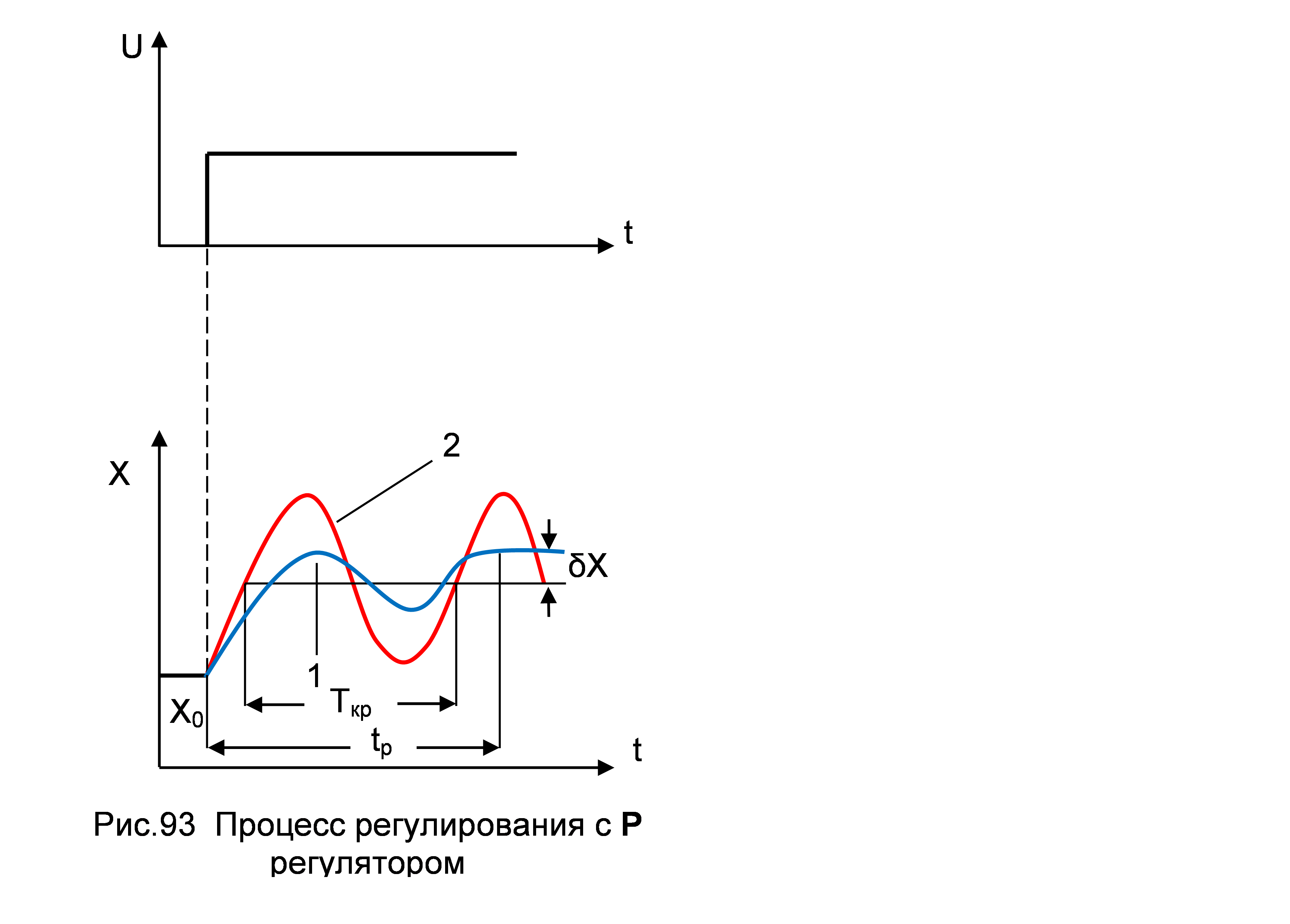
У P -регулятора , его называют также статическим,изменение положения РО пропорционально отклонению регулируемого параметра «е » от его заданного значения X 0 .
Преимущества
Р-регулятора – его быстродействие (небольшое время
регулирования
tp
) и высокая устойчивость процесса регулирования.
Недостаток
– наличие статической ошибки δ
Х,т.е. после окончания процесса регулирования(за время
регулирования
t p)
параметр не
возвращается точно к заданному значению, а отличается от заданного на δ
Х,что снижает точность регулирования.
С увеличением коэффициента усиления Кр, величина δ
Хуменьшается, но АСР
может потерять устойчивость. При Кр = Кр кр в системе возникают не затухающие
колебания с постоянной амплитудой, а при ещё большем Кр, с возрастающей
амплитудой. Рис. 93
1 –
регулируемый процесс с
P
регулятором при
K p
<
K p
.кр
2 – Регулируемый процесс при
K p = K
р.кр
T кр – период не затухающих колебаний при K p = K р.кр
t р – время регулирования для устойчивого процесса
X 0 – начальное значение регулируемого параметра
δ Х – статическая ошибка
У I -регулятора , его называют также a статическим,изменение положения РО пропорционально интегралу от отклонения «е » регулируемого параметра от его заданного значения X 0 . Регулирующий орган будет перемещаться до тех пор, пока параметр не достигнет точно заданного значения, т.е. у него нет статической ошибки δ Х=0. Это его достоинство, но недостатком является его плохая устойчивость, большое время регулирования. Его можно применять на инерционных объектах с самовыравниванием.

У D –регулятора , регулирующее воздействие пропорционально скорости отклонения параметра от задания т.е. производной от отклонения «е ». На рисунке 94 при ступенчатом изменении U(t ), возникает сигнал ошибки е , которыйбудет уменьшаться в процессе регулирования t , до тех пор, пока параметр не достигнет нового значения U(t).t 0 - начало отклонения параметра, t 1- момент срабатывания регулятора без сигнала по производной, «Δ» - зона нечувствитвльности регулятора.
Скорость отклонения в начальный момент большая и поэтому сигнал по скорости будет большим , регулятор сразу начнёт действовать в момент t1 ,ещё до заметного«Δ» отклонения параметра и параметр будет быстрее установлен к заданию U(t) .
Таким образом, этот регулятор имеет повышенное быстродействие – это его достоинство. Недостаток – не стабилен в работе, поэтом отдельно не используется. Но этот принцип используют для повышения качества регулирования PD и PID регуляторов.
Комбинируя простейшие P , I , D , регуляторы, получают PI , PD , PID регуляторы. На практике в основном применяют Р , PI , PID регуляторы
PI - регулятор, комбинация Р и I регуляторов. Имеет достоинства обоих. От Р – хорошая устойчивость, от I δ Х=0.
PD - регулятор, комбинация Р и D регуляторов. Имеет достоинства обоих. От Р – хорошая устойчивостьи, от D – повышенное быстродействие, но сохраняется статическая ошибка δ Х, как у Р регулятора.
PID - регулятор, комбинация Р, I и D регуляторов. Имеет достоинства троих.От Р – хорошая устойчивостьи, от I – отсутствие статической ошибки δ Х=0, от D – повышенное быстродействие.
PID - регулятор по своим возможностям наиболее универсален. В настоящее время в основном применяются электронные и цифровые PID –регуляторы, на основе которого можно осуществлять различные законы регулирования.
Структурная схема PID регулятора
На Рис.95показана структурная схема PID регулятора
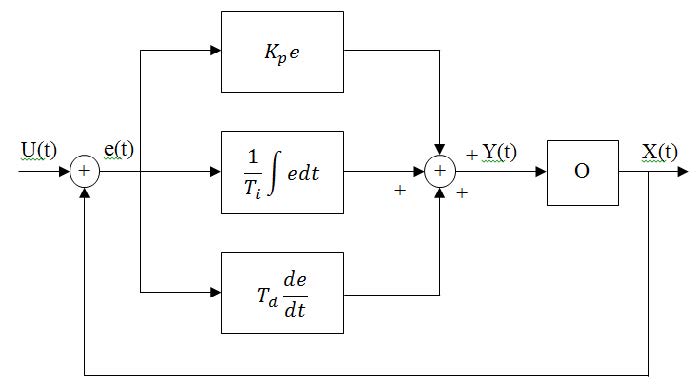
Рис. 95 Структурная схема PID регулятора
K p – коэффициент усиления регулятора
T i – постоянная интегрирования
T d – постоянная дифференцирования
Это настроечные параметры регуляторов
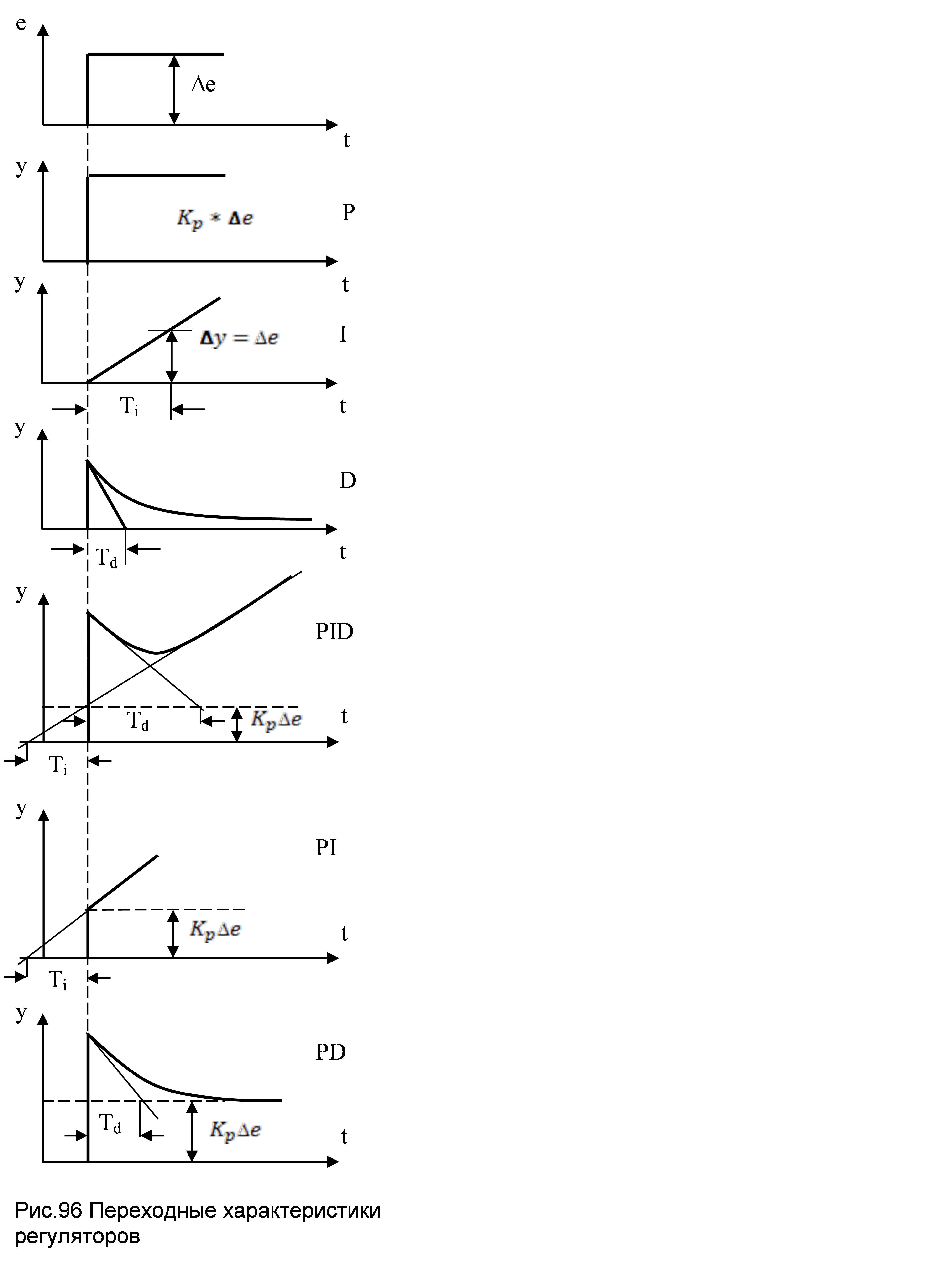
Переходные характеристики регуляторов показаны на Рис.96. Для P, I и D регуляторов они аналогичны характеристикам соответствующих типовых звеньев. Для остальных регуляторов, характеристики получают сложением характеристик P, I, и D регуляторов.
Переходные характеристики показывают как изменяется регулирующее воздействие регулятора Y во времени при отклонении регулируемого параметра X от задания т.е. при появлении сигнала ошибки «е».
При отклонении, уменьшении температуры в объекте (X) ,у Р регулятора , регулирующий клапан приоткроется (Y) пропорционально отклонению температуры и остановится. Подача тепла увеличится и температура , быстро восстановится, но не точно, возникнет статическая ошибка δ Х.
У PID регулятора, за счёт Р и D составляющих, клапан сначала сильно откроется, обеспечивая быструю подачу тепла, но затем, чтобы не возникло перегрева, начнёт прикрываться, обеспечивая подачу нужного тепла в объект. Затем вступает в действие I составляющая, которая приоткрывает клапан до тех пор, пока не будетустранена статическая ошибка δ Х. Таким образом D составляющая увеличивает быстродействие регулятора, а I составляющая убирает статическую ошибку δ Х.
Контрольные вопросы
1.Если у Р регулятора Кр увеличить, то как изменится δ Х?
2.Что даёт I составляющая у регулятора?
3.На какое свойство и как влияет D составляющая у регулятора?
4.Какой регулятор по качеству самый худший и самый лучший.?
Электрические схемы регуляторов
На Рис. 97 показаны возможные варианты реализации регуляторов на операционных усилителях. Р регулятор реализован на DA1 .
Коэффициент усиления Р составляющей Кр = Rp/ R1 . В схеме ,PID регулятора на DA1 выполнен повторитель Р составляющей т.к. К = R/R=1 , а функции усилителя выполняет DA 4, котораяодновременно являетсясравнивающим устройством , котор oe сравнивает сигнал от задатчика +U с сигналом от датчика - Ux. Их разность е= U - Ux подаётся на вход DA . Знак е зависит от направления измененияпараметра. Настроечные параметры для I части Т i = Ri С i , и для D части Td=RdCd. На DA5 Выполнен сумматор, который суммирует все составляющие и на выходе получаем сигнал, изменяющийся по PID закону.
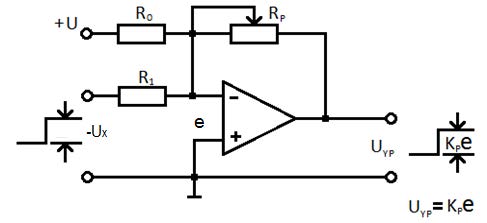
P регулятор
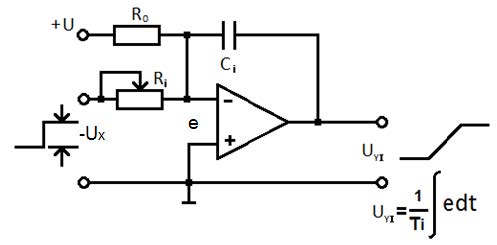
I регулятор

D регулятор
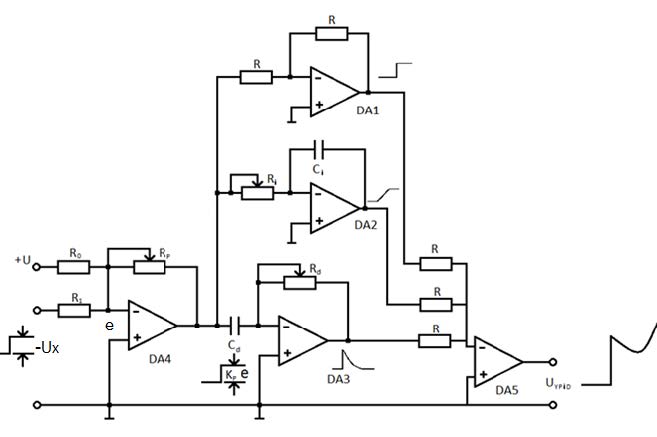
PID регулятор
Рис. 97Электрические схемы P, I, D, и PID регуляторов
Закон регулирования электронного Т i, Т d.

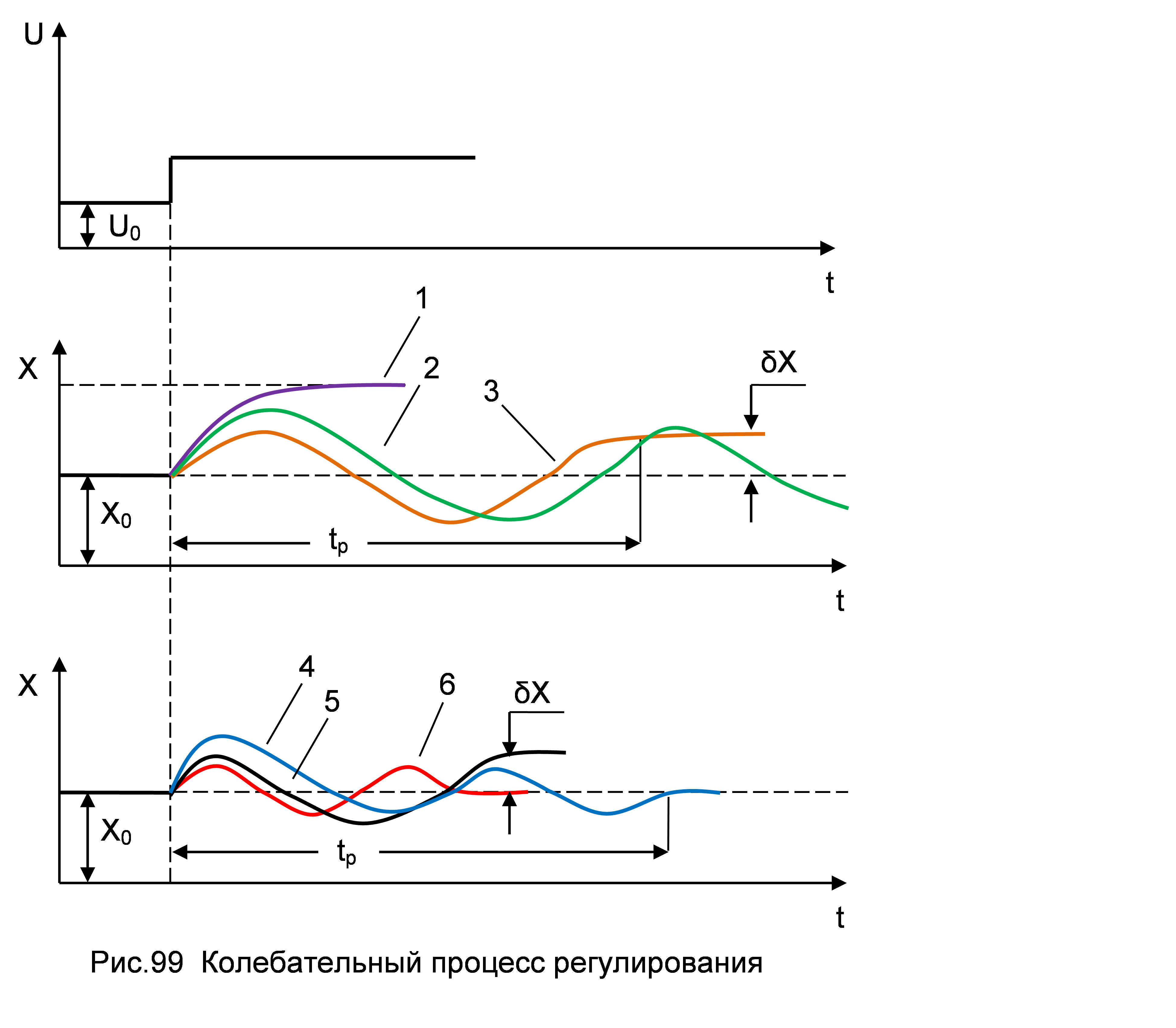
1 – без регулятора
2 – I регулятор
3 – P регулятор
4 – PI регулятор
5 – PD регулятор
6 – PID регулятор
X 0 - начальное значение регулируемого параметра
δ X – статическая ошибка
При прочих равных условиях пропорционально-интегрально-дифференциальные или ПИД (PID - Proportional-Integral-Derivative) регуляторы позволяют поднять точность управления в 5-100 раз по сравнению с позиционным регулятором.
Наиболее часто в задачах АСУ ТП применяются двухпозиционное регулирование и ПИД регулирование.
Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда присутсвуют колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла, от разности и от скорости изменения параметров. В результате ПИД регулятор обеспечивает такое состояние исполнительного устройства (промежуточное между включен или выключен), при котором измеренный параметр равен заданному. Поскольку состояние исполнительного устройства стабилизируется, точность поддержания параметра в системе повышается в десятки раз. Таким образом, закон регулирования обеспечивает точность.
В принципе, точность поддержания будет определяться точностью измерения сигнала и интенсивностью внешних воздействий на объект.
Pb - начальная температура в системе
ti - постоянная времени интегрирования
td - постоянная времени дифференцирования
Сигнал управления для ПИД регулятора определяется тремя компонентами:

(П - пропорциональная компонента)
Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента).
Качество управления, которое обеспечивает ПИД регулятор в значительной степени зависит от того, насколько хорошо выбранные параметры регулятора соответствуют свойствам системы. Это означает, что ПИД регулятор перед началом работы необходимо настроить.
Качество регулирования ПИД-регулятора определяется точностью настройки его параметров. Существует много различных методик настройки ПИД регуляторов. В основе большинства из них лежит анализ переходной характеристики.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, либо постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования- минимально возможной. Устанавливается необходимая уставка SP. Зона пропорциональности устанавливается равной 0 (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
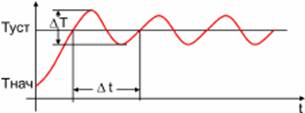
Тнач - начальная температура в системе
Туст - заданная температура (уставка)
Δ
Т- размах колебаний температуры
Δ
t - период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: Pb=Δ
Т. Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
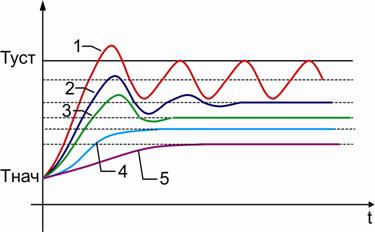
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Этап 2. Настройка дифференциальной компоненты (td) ПИД-регулятора
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует сразу перейти к этапу 3 (Настройка интегральной компоненты ti).
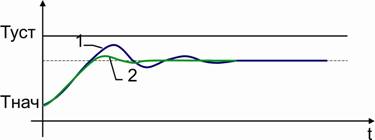
На этапе настройки зоны пропорциональности установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.1, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.2. В качестве первого приближения постоянная времени дифференцирования делается равной td = 0,2Δ t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис.1). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка интегральной компоненты (ti) ПИД-регулятора
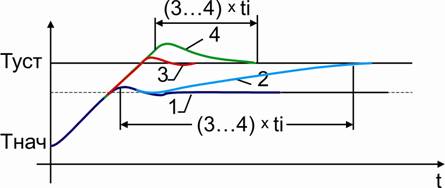
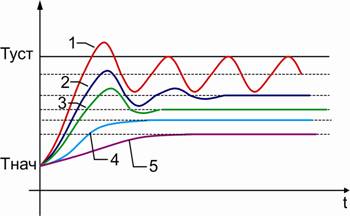
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на рис., кривая 1. Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины, равной Δ t.
Переходная характеристика типа 2
Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым и длится примерно (3…4)ti.
Переходная характеристика типа 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится (3…4)ti. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3
Оптимальная.
Итог
Таким образом, мы рассмотрели процесс поэтапной настройки различных компонент ПИД-регулятора. На каждом этапе контролировался вид переходной характеристики и при необходимости корректировались значения параметров ПИД-регулятора. При этом начальными значениями параметров служили параметры переходной характеристики, полученной для двухпозиционного регулятора, а именно: Pb = ΔТ; ti= Δt; td = 0.2Δt. Опыт показывает, что для большинства случаев эти значения параметров обеспечивают настройку ПИД-регулятора, близкую к оптимальной, и дальнейшая коррекция параметров не требуется.
ПИД-регулятор - это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном.
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений.
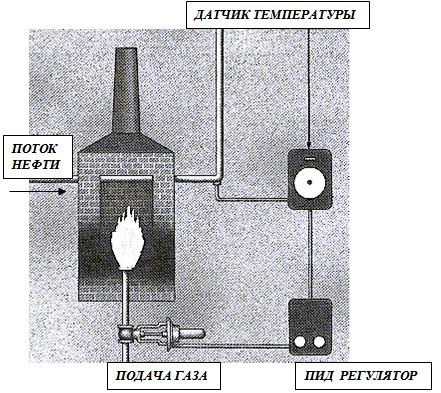
Одна из причин запаздывания - емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке.









