На основе этого построим переходные процессы и проанализируем результат:
3 .5 ПИД-регулятор
Пропорционально-интегрально-дифференциальный (ПИД) регулятор - наиболее эффективный и распространенный вид регулятора, обеспечивающий достаточно высокую точность при управлении различными процессами.
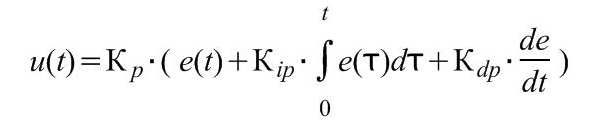
ПИД-регулятор вырабатывает выходной сигнал, который рассчитывается по следующей формуле:
X p – полоса пропорциональности, E i – рассогласование, T д – постоянная времени дифференцирования, Т и – постоянная времени интегрирования, ΔE i - разность между двумя соседними измерениями E i и E i -1, Δt из время между двумя соседними измерениями T i и T i –1, ∑E i - накопленная в i -й момент времени сумма рассогласований
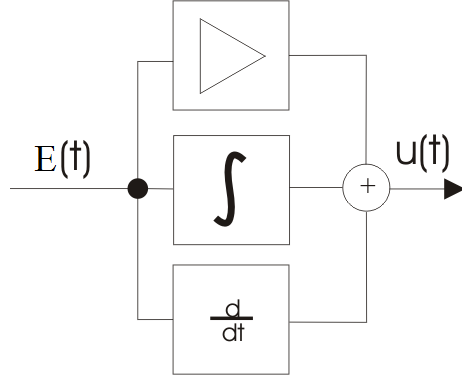
Как видно из формулы 3.4.1, сигнал управления является суммой трех составляющих:
пропорциональной (1-е слагаемое);
интегральной (3-е слагаемое);
дифференциальной (2-е слагаемое).
Дифференциальная часть – производная от ошибки, да ещё и с коэффициентом Тд – временем дифференцирования. Эта часть может существенно уменьшить время регулирования и улучшить динамическое качество регулирования.
Пропорциональная составляющая зависит от рассогласования E i и отвечает за реакцию на мгновенную ошибку регулирования.
Интегральная составляющая содержит в себе накопленную ошибку регулирования, которая является дополнительным источником выходной мощности и позволяет добиться максимальной скорости достижения уставки при отсутствии перерегулирования. Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно.
Смоделируем ПИД-регулятор:
Посмотрим на переходной процесс системы:

Для определения время дифференцирования стоит лишь провести подкасательную кривой до пересечения с ожидаемым значением E*K и поделить полученное значение на коэффициент усиления упреждения Кд, который в нашем случае равняется 1.
Двухпозиционный регулятор (компаратор)сравнивает значение измеренной величины с эталонным (уставкой). Состояние выходного сигнала изменяется на противоположное, если входной сигнал (измеренная величина) пересекает пороговый уровень (уставку).
Выходной сигнал двухпозиционного регулятора может иметь только два значения: максимальное и минимальное.
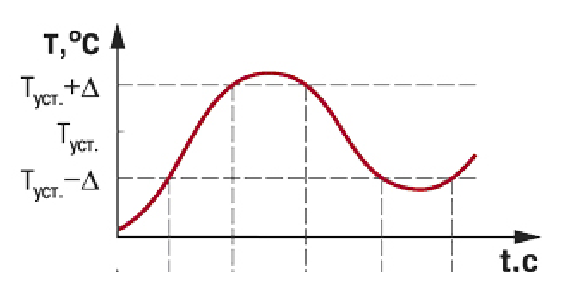
Рис3.6 Работа двухпозиционного регулятора.
В этой работе, начальное положение считывается с помощью потенциометра и затем передается на аналоговый модуль контроллера. Далее через simatic step 7 показание считывается и сравнивается с уставкой. Если уставка находится за пределами зоны нечувствительности компаратора, то в зависимости, от того больше или меньше изначальное положение каретки чем уставка, включается соответствующий распределитель. Когда каретка попадает в зону нечувствительности, соответствующий распределитель переключается в неактивное положение. При смещении каретки или задании новой уставки за зоной нечувствительности, начинается работа распределителей согласно возмущению.
Вывод: двухпозиционный регулятор используется для регулирования измеренной величины в несложных системах, когда не требуется особой точности. Код алгоритма 2-х позиционного регулятора представлено в приложении А.
Особенности П, ПИ и ПИД регулирования
Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
П регулирование
. Выходная мощность прямопропорциональна ошибке регулирования. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования. Пропорциональное регулирование можно рекомендовать для малоинерционных систем с большим коэффициентом передачи. Для настройки пропорционального регулятора следует сначала установить коэффициент пропорциональности максимальным, при этом выходная мощность регулятора уменьшится до нуля. После стабилизации измеренного значения, следует установить заданное значение и постепенно уменьшать коэффициент пропорциональности, при этом ошибка регулирования будет уменьшаться. Когда в системе возникнут периодические колебания, коэффициент пропорциональности следует увеличить так, чтобы ошибка регулирования была минимальной, а периодические колебания максимально уменьшились.
ПИ регулирование. Выходная мощность равна сумме пропорциона- льной и интегральной составляющих. Чем больше коэффициент пропор- циональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности - максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования - на 20% меньше периода колебаний.
ПИД регулирование.
Выходная мощность равна сумме трех состав- ляющих: пропорциональной, интегральной и дифференциальной. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая, чем больше постоянная времени дифференцирования, тем сильнее реакция системы на возмущающее воздействие. ПИД-регулятор применяется в инерционных системах с относительно малым уровнем помех измерительного канала. Достоинством ПИД регулятора является быстрый выход на режим, точное удержание заданной температуры и быстрая реакция на возмущающие воздействия. Ручная настройка ПИД является крайне сложной, поэтому рекомендуется использовать функцию автонастройки.
Автонастройка ПИД регулирования в приборах ЧАО “ТЭРА”:
Главное, что определяет качество ПИД регулятора - это его способность точно и быстро выходить на заданную температуру, для чего у всех современных ПИД регуляторов обязательно присутствует функция автонастройки. Стандартных алгоритмов автонастройки ПИД не существуют, на практике каждый производитель применяет свой собственный алгоритм. Поэтому, пользователь, приобретая один и тот же товар под названием “ПИД регулятор” у разных производителей, на своем объекте может получить совсем разные результаты их применения. Основными достоинствами алгоритма автонастройки в ПИД регуляторах ЧАО “ТЭРА” являются:
Автонастройку можно производить при любом стабильном состоянии объекта регулирования. Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Автонастройку необходимо повторить, если:
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: "устройство регулирования () обеспечивающие на своем выходе регулируемого параметра, или его изменения, описываемую типа П, ПИ и т.д....... ". При этом:
Очень важное замечание - в подавляющем большинстве случаев эти регуляторы обеспечивают изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e ) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u . Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют "ошибкой" или "отклонением", Х - "заданным уровнем" или "заданным значением", причем Х , в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы "верхний" контур регулирования был "медленным" по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора , как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
где "тау" - время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
Очевидно, что функция содержит 3 слагаемых, первое - пропорциональное к изменению заданного параметра, второе - интегральное, а третье - дифференциальное. В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : - величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: - величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: - величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку - если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
тут нет никакого подвоха, все то же самое, просто другая запись.
ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины. Если добавить к алгоритму дифференциальную составляющую - он трансформируется в .
ПИ-регулятор. Формула выходного сигнала:
ПИ-регулятор. Передаточная функция:
W(p)= K(1+1/Tи*s) или W(p)= K+1/Tи*s;
Из формулы видно, что п-составляющая складывается с накопленной и-составляющей за время t. Фактически, ПИ-регулятор «учится» на предыдущем опыте. Если система не испытывает внешних возмущений – регулируемая величина стабилизируется на заданном значении: П-составляющая будет равняться 0, а интегральная составляющая полностью обеспечит выходной сигнал.
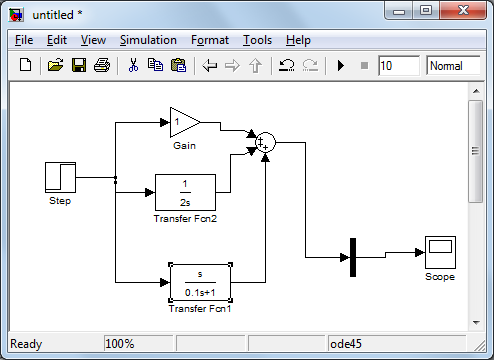
ПИ-регулятор можно получить – параллельным. Составим в MatLab схему из двух параллельно соединенных звеньев – к и 1/Ти. Дадим запаздывание в 1 секунду, чтобы увидеть выход в начальный момент времени.
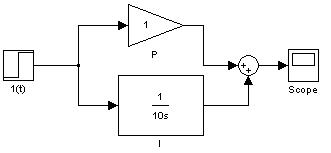
Рассмотрим ПИ-регулятора. Переходная характеристика – реакция на единичное ступенчатое возмущение. Смоделируем в среде MatLab несколько переходных процессов для различных ситуаций.
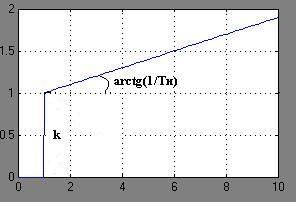
С графика видно, что переходная характеристика ПИ-регулятора состоит из сложенных пропорциональной и интегральной. Чем больше к, тем больше будет пропорциональный заброс на графике.
Рассмотрим на примере нескольких Ти на ПИ-регулятор, его выход и вид переходного процесса. Смоделируем несколько параллельных процессов с выводом на один Scope с помощью Mux.









