Característica mecánica estática del motor. Llamado a la dependencia de la velocidad del motor. w = ¦ (M). Casi todos los motores eléctricos tienen la propiedad de que su velocidad es una función decreciente del par motor. Esto se aplica a todos los motores eléctricos convencionales utilizados en la industria, es decir, a motores de CC de excitación independiente, secuencial y mixta, así como a motores de CA de colector sin escobillas y asíncronos. Sin embargo, el grado de cambio en la velocidad con un cambio en el par de torsión varía con los diferentes motores y se caracteriza por los llamados rigidez Sus características mecánicas.
La rigidez de las características mecánicas del accionamiento.- es la relación del incremento de momento desarrollado por el dispositivo electromotor, cuando la velocidad cambia, a la diferencia correspondiente en las velocidades angulares del accionamiento eléctrico:
![]()
Usualmente, en las áreas de trabajo, las características mecánicas de los motores tienen una rigidez negativa β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
La rigidez de la característica mecánica en un sentido geométrico es la pendiente de la característica mecánica del motor.
Si comparamos las características 1 y 2, entonces la característica 1 es más suave, ya que su pendiente es menor
DM 1\u003e DM 2 Þ b 1\u003e b 2, ya que y.
Las características mecánicas de los motores eléctricos se pueden dividir en cuatro categorías principales:
1. Característica mecánica absolutamente rígida. (β = ∞) es una característica en la que la velocidad con un cambio en el momento no cambia. Los motores síncronos tienen esta característica (línea recta 1 en la Fig. 1).
2. Característica mecánica rígida. - Esta es una característica en la que la velocidad con un cambio en el momento, aunque disminuye, pero en menor medida. Las características mecánicas rígidas tienen motores de corriente continua de excitación independiente, así como motores asíncronos dentro de la parte de trabajo de las características mecánicas (curva 2 en la Fig. 1).
Para un motor asíncrono, la rigidez en diferentes puntos de la característica mecánica es diferente. Entre los valores máximos (críticos) de los momentos en el motor Mk, d y el generador Mk, modos g, la característica de un motor de inducción tiene una rigidez relativamente alta.
 3. Característica mecánica blanda - Esta es una característica en la que la velocidad varía significativamente con un cambio en el momento. Esta característica tiene un motor de corriente continua de excitación secuencial, especialmente en la zona de pequeños momentos (curva 3 en la figura 2). Para estos motores, la rigidez no permanece constante para todos los puntos de las características.
3. Característica mecánica blanda - Esta es una característica en la que la velocidad varía significativamente con un cambio en el momento. Esta característica tiene un motor de corriente continua de excitación secuencial, especialmente en la zona de pequeños momentos (curva 3 en la figura 2). Para estos motores, la rigidez no permanece constante para todos los puntos de las características.
Los motores de corriente continua de excitación mixta pueden asignarse al segundo o tercer grupo, dependiendo de la rigidez de las características mecánicas.
4. Característica mecánica absolutamente suave. (β = 0) es una característica en la que el par motor con un cambio en la velocidad angular permanece sin cambios. Esta característica tiene, por ejemplo, motores de corriente continua de excitación independiente cuando se alimenta desde una fuente de corriente o cuando opera en sistemas de transmisión cerrados en el modo de estabilización de corriente de inducido (línea recta 4 en la Fig. 2).
Característica mecánica de la máquina de trabajo. - es la dependencia de la velocidad de la máquina de trabajo desde el momento de la resistencia, que crea w = (M s).
Las características mecánicas describen la carga en el accionamiento.
Clasificación de cargas típicas:
1. momento activo de resistencia M con = const
Ejemplo: accionamiento de cabrestante de grúa.

La carga es capaz de accionar el propio mecanismo, por lo que se denomina activo. Las estructuras deben proporcionar un freno de estacionamiento.
2. Momento reactivo de resistencia M = const (carga del tipo de constancia del momento)
Característica de los mecanismos de "fricción seca".

M c = M 0 signo (w).
w\u003e 0 Þ M con\u003e 0; w<0 Þ М с <0.
El momento reactivo es una reacción a la velocidad w.
3. fricción viscosa
M con = α in. T ω
El momento de resistencia es proporcional a la velocidad.

bW - coeficiente de fricción viscosa.
4. momento de ventilación

M c = kw 2 signo (w).
Característica para ventiladores centrífugos y bombas.
Si cierra la entrada, el momento de carga disminuirá.
P = M c w - potencia.
5. Constancia de potencia P = const.
Donde P con = const.
A menudo se usa para accionamientos principales de máquinas-herramienta (torneado, fresado, taladrado, rectificado y otras máquinas).
w max ∙ M min = w min ∙ M max = const.
Considere la posibilidad de girar:
w = const, F p = const.



Para la máquina de cepillado:
P 1 = v min ∙ F max - carrera de trabajo, P 1 = v max ∙ F min - ralentí.
P 1 »P 2 = const.
Características de la selección del motor:

Cuando P 1 = 5 kW, obtenemos P w = 5 ∙ 100 = 500 kW.
La selección directa del motor en términos de límites lleva a una sobreestimación de la potencia del motor instalada por D w veces, donde D w es el rango de control de velocidad. De hecho, la potencia del motor se puede reducir a propósito, seleccionando un rango de control de velocidad.
Para DFT, HB es el control de la velocidad de las corrientes de excitación.
TEMA DE CONFERENCIA 10
Características mecánicas de los motores eléctricos.
PLAN DE CONFERENCIA
1. Naturales y artificialescaracteristicas mecanicasmotores electricos
La característica mecánica del motor, independientemente del tipo de corriente, se refiere a la dependencia de la velocidad angular del eje del motor ω (en adelante, el motor) del par electromagnético del motor, es decir, la dependencia ω ().
Aquí es necesario hacer una observación importante: de acuerdo con la ecuación de los momentos, en estado estable =, el par electromagnético del motor. equilibrado por momento estático (momento resistencia de om) mecanismo Esto significa que la magnitud del momento electromagnético del motor depende completamente del momento del mecanismo.?? Cuanto mayor sea el momento de frenado del mecanismo, mayor será el par del motor y viceversa.
Es decir para cualquier motor, la cantidad de entrada es el momento del mecanismo y la salida?? su velocidad
La velocidad de casi todos los motores eléctricos es una función decreciente del par motor, es decir, con un aumento en el par motor, la velocidad disminuye [chil 33]. Pero el grado de cambio en la velocidad de diferentes motores eléctricos es diferente y caracterizado por el parámetro Características mecánicas de la rigidez.
Rigidez Características mecánicas del accionamiento. β Esta es la relación entre la diferencia en los momentos electromagnéticos del motor a diferentes velocidades y la diferencia correspondiente en las velocidades angulares del motor eléctrico..
β = (M 2? M 1) / (ω2 ?? ω1) = Δ /
Generalmente, en las áreas de trabajo, las características mecánicas de los motores eléctricos tienen una rigidez negativa β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Hay natural y artificialcaracteristicas mecanicasy motores electricos.
Característica mecánica natural. esta es la dependencia ω (), tomada en condiciones normales Condiciones de funcionamiento del motor, es decir, en parámetros nominales principales y la ausencia de resistencias adicionales.en cadenas de motor bobinados.
Los parámetros de la fuente de alimentación incluyen: ¿a una corriente constante? voltaje a la CA ?? Tensión y frecuencia de la corriente.
Características tomadas bajo condiciones. aparte de lo normal, llamado artificial.
Las características artificiales se pueden obtener cambiando los parámetros del motor, por ejemplo, introduciendo resistencias en el circuito de devanado de inducido de un motor de corriente continua o en el circuito de devanado del rotor de un motor de inducción, o cambiando los parámetros de suministro de la red, es decir. Tensión y frecuencia AC.
Cada motor eléctrico tiene uno natural y muchos artificiales caracteristicas El número de características artificiales depende del número de pasos del elemento regulador, por ejemplo, el número de pasos del reóstato de ajuste en el circuito de devanado de inducido del motor de CC. Si el motor tiene tales pasos? Cinco, entonces este motor tiene seis características ?? Cinco artificiales y una natural.
Las características mecánicas artificiales se utilizan para obtener condiciones de funcionamiento del motor como control de velocidad, marcha atrás, frenado eléctrico, etc.
Considerar naturalmentes Características mecánicas de los motores.diferentes tipos
La figura 10.1 Características mecánicas naturales (a) y angulares (b) de un motor síncrono; θ el ángulo de demora del eje del rotor desde el eje del campo magnético del devanado del estator
Característica mecánica natural de un motor síncrono.
Natural mecanicocaracterístico motor síncrono(fig. 10.1a) ?? absolutamente duro?? esto es caracteristica a la cualla velocidad con el cambio del momento no cambia.su rigidez (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C La estabilidad de la velocidad del rotor de un motor síncrono se explica por las características angulares del motor síncrono θ () como sigue (Fig. 10.1 b); si la carga mecánica no se aplica al rotor, entonces coinciden los ejes del rotor y el campo magnético giratorio del devanado del estator. θ = 0 ° (punto 0 en la figura 10.1 b). Si el momento electromagnético del motor es M = 0, el motor funciona al ralentí.
Si aplica una carga mecánica al eje del motor y la aumenta, entonces el rotor bajo la influencia de la carga mecánica se retrasará con respecto al campo magnético del devanado del estator en un ángulo creciente θ.
Cuanto mayor sea la carga mecánica en el eje, mayor será este ángulo y mayor será el par electromagnético giratorio del motor.
Tal aumento simultáneo en el par motor provocado por un aumento en el par de frenado del mecanismo. solo asegura la estabilidad de la velocidad del motor (En la Fig. 10.1 una gráfica de las características de = 0 a =).
Sin embargo, la constancia de la velocidad del motor se mantiene siempre que el ángulo ≤90 °. En θ = 90 °, el motor desarrolla un momento crítico (máximo) (punto A en la Fig. 10.1 a).
Si a θ = 90 ° aumenta nuevamente la carga mecánica (θ\u003e 90 °), el par electromagnético del motor disminuirá (segmento AB de la característica angular), es decir, Este momento será menor que el momento de frenado del mecanismo. Como resultado, la velocidad del rotor del motor disminuirá y, al final, el rotor se detendrá.
Dado que la velocidad del rotor es menor que la velocidad del campo magnético giratorio del devanado del estator, se dice que el motor perdió el sincronismo.
Como se desprende de las características angulares del motor, la condición de la pérdida de sincronización del motor es: θ≤90 °.
En la práctica, el ángulo nominal es θ = 20 ... 40 °.
Alcance de los motores síncronos: en los buques. Como los motores eléctricos de remo giran los tornillos; en la orilla ?? para accionar poderosos mecanismos, como compresores en estaciones de bombeo de gas.
Características mecánicas naturales de un motor de corriente continua.
Naturales característica mecánica de un motor de corriente continua.excitación paralela (fig. 8.5) ??bien ella porque su dureza
β = Δ / Δω ≤ 10%.

La figura 10.2 Natural característica mecánica del motor de excitación paralelo dc.
Esto significa que con un cambio en el par electromagnético del motor en un amplio rango, su velocidad es bastante estable (es decir, cambia solo ligeramente).
Tales motores se utilizan donde, cuando la carga del mecanismo cambia en un amplio rango, la velocidad del motor no debería cambiar drásticamente. En bombas eléctricas, ventiladores, etc.

La figura 10.3 Natural característica mecánicadC motor de la serie de excitación.
Naturales la característica mecánica de un motor de corriente continua de excitación secuencial (Fig. 10.3) ?? suave porque su rigidez
β = Δ / Δω\u003e 10%.
Esto significa que con un cambio en el par electromagnético del motor, incluso en pequeños límites, su velocidad cambia significativamente.
Recordemos dos características sobresalientes de este motor. DC motor de la serie de excitación:
la velocidad del motor aumenta dramáticamente, el motor "va de carreras". Por lo tanto, este motor no se puede dejar sin una carga en el eje;
Estos motores no se usan en los barcos, pero se usan en tierra, por ejemplo, en el transporte eléctrico, en particular en trolebuses, donde no permanecen sin carga en el eje y donde se necesitan grandes puntos de partida (al arrancar el trolebús).

La figura 10.4 Natural características mecánicas de los motores de corriente continua de excitación mixta: 1 s. excitación secuencial paralela;
2 - con secuencialmente excitación paralela
Naturales la característica mecánica de un motor DC de excitación mixta es intermedia entre las características de los motores de excitación paralela y secuencial, ya que ¿El flujo magnético de excitación es creado por la acción conjunta de ambos devanados? paralelo y consistente.
Hay dos tipos de motores de excitación mixta:
2. con consistencia excitación paralela, en la que la parte principal del flujo magnético resultante se crea mediante un devanado en serie (hasta el 70%, el 30% restante).paralela).
Por lo tanto, el gráfico de las características mecánicas del motor del primer tipo más rígido que el motor del segundo tipo.
Ambas características mecánicas?? suave porque su rigidez
β = Δ / Δω\u003e 10%.
En los barcos, los motores de excitación mixta se utilizan en accionamientos eléctricos controlados. Tornos, grúas, molinetes y agujas.
Característica mecánica natural del motor asíncrono.
Naturales la característica mecánica de un motor asíncrono tiene dos secciones? AV que no funciona (aceleración) y aeronaves en funcionamientoD (fig. 8.8).

La figura 10.5 Natural característica mecánica del motor asíncrono.
Al arrancar el motor se desarrolla el momento de arranque.(segmento OA), después de lo cual acelera a lo largo de la trayectoria ABC hasta el punto C. Al mismo tiempo, tanto la velocidad como el par aumentan en el segmento AB, y en el punto B el motor desarrolla el par máximo.. En el segmento del sol, la velocidad continúa aumentando, y el momento disminuye, a la nominal (punto C). En la tramaBC motor sobrecargadoporque en cualquier lugar en esta área el momento electromagnético del motor es más que nominal. (> >).
En condiciones normales, el motor funciona en la sección CD cuya rigidez
β = Δ / Δω < 10%.
Esto significa que cuando el par cambia en un amplio rango, la velocidad del motor cambia ligeramente.
Los motores asíncronos han encontrado la aplicación más amplia en los barcos con una estación de alimentación de CA.
La industria produce específicamente para barcos motores asíncronos de diferentes series, por ejemplo, 4A ... OM2 (cuarta serie de motores asíncronos), MAP (polo asíncrono marino conmutable), MTF (con rotor de fase), etc.
¿Con esta serie de motores 4A? sola velocidad, serie MAP? ¿Dos y tres velocidades, series MTF? el número de velocidades está determinado por el circuito de control (hasta 5 velocidades).
Un motor de excitación paralelo es un motor de CC cuyo devanado de excitación está conectado en paralelo con el devanado de armadura (Fig. 1). Al tomar características, la tensión nominal U n = const se suministra al circuito de armadura.
La figura 1 - Circuito de motor de excitación paralelo
La corriente consumida por el motor de la red está determinada por la suma I = I a + I c, la corriente de excitación suele ser I c = (0.03 ... 0.04) I n. Todas las características del motor se eliminan con resistencias constantes en los circuitos de excitación r = const y anclajes
Respuesta de velocidad.
La dependencia n = f (I a) con U n = const y I in = const
De la ecuación EMF para un motor eléctrico.
![]()
![]()
Como puede verse en la expresión, la velocidad de rotación del motor depende de dos factores: los cambios en la corriente de carga y el flujo. A medida que aumenta la corriente de carga, aumenta la caída de voltaje en la resistencia del circuito de la armadura y disminuye la velocidad del motor.
La respuesta transversal de la armadura desmagnetiza el motor, es decir, Con el aumento de la corriente I a disminuye el flujo y, por lo tanto, aumenta la velocidad del motor. Por lo tanto, ambos factores actúan en relación con las revoluciones de la máquina y el tipo de característica de velocidad estará determinado por su efecto neto.
En la fig. 2 muestra tres características diferentes de velocidad del motor (curvas 1, 2, 3). Curva 1: característica de velocidad con la prevalencia de la influencia I a ∑r, curva 2: ambos factores están aproximadamente equilibrados, curva 3: prevalece el factor de acción desmagnetizante de la reacción de la armadura.

La figura 2 - Características del motor de excitación paralelo.
Debido al hecho de que en los motores reales el cambio en el flujo insign es insignificante, la respuesta de velocidad es casi una línea recta. En varias máquinas modernas de excitación paralela para compensar el efecto de la respuesta transversal de la armadura, se instala un devanado de campo estabilizador adicional, que compensa total o parcialmente el efecto de la reacción de la armadura.
La forma normal de la característica de velocidad a la que se garantiza el funcionamiento estable del motor es la característica de la forma de la curva 1.
La pendiente de la característica está determinada por la magnitud de la resistencia del circuito de armadura Σr sin tener en cuenta la reacción de la armadura. Cuando no se incluye la resistencia adicional en la cadena de anclaje, la característica se llama natural. La característica natural de un motor de excitación paralelo es bastante rígida. Por lo general, donde no es la velocidad de rotación al ralentí. Cuando se incluye resistencia adicional R rg en el circuito de la armadura, la pendiente de las características aumenta, se vuelven "suaves" y se denominan artificial o reostática.
Caracteristicas del momento - es la dependencia M = f (I a) con r in = const, U = U n y Σr = const. En el estado estacionario del motor según
tenemos M em = M 2 + M 0 = c m I a F. Si durante el funcionamiento de la máquina el flujo F no hubiera cambiado, entonces la característica de momento sería directa (característica 4, figura 2). De hecho, el flujo Φ con una disminución de la corriente I a disminuye ligeramente debido a la acción desmagnetizadora de la reacción de la armadura, por lo tanto, la característica de par está ligeramente inclinada hacia abajo (curva 5). La característica del momento útil se encuentra debajo de la curva del momento electromagnético por el valor del momento de ralentí (curva 6).
Eficiencia caracteristica η = f (I a) se elimina en U = U n, r in = const, Σr = const y tiene una forma típica para motores eléctricos (característica 7 en la Fig. 2). La eficiencia aumenta rápidamente al aumentar la carga de ralentí a 0.25 P n, alcanza su valor máximo en P = (0.5 ... 0.75) P n, y luego a P = P n permanece casi sin cambios. Generalmente en motores de baja potencia η = 0.75 ... 0.85, y en motores de potencia media y alta η = 0.85 ... 0.94.
Caracteristica mecanica representa la dependencia n = f (M) en U = U n, I in = const y Σr = const. La expresión analítica de las características mecánicas se puede obtener de la ecuación de fuerza electromotriz del motor eléctrico

Determinando la corriente I y de la expresión M = C e I a F y sustituyendo este valor de la corriente en la expresión anterior, obtenemos
![]()
Si ignoramos la reacción de la armadura y asumimos que el flujo no cambia, entonces las características mecánicas del motor eléctrico de excitación paralela pueden representarse como líneas rectas (Fig. 3), cuya pendiente depende de la resistencia R pg de la armadura incluida en el circuito. Cuando R pr = 0, la característica se llama natural.
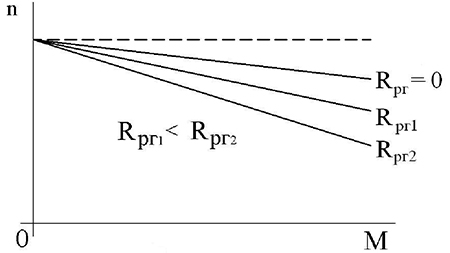
La figura 3 - Características mecánicas de un motor de excitación paralelo.
Debe recordarse que cuando se interrumpe el circuito de excitación, I = 0 velocidad del motor n → ∞, es decir, el motor está "corriendo", por lo que debe desconectarse inmediatamente de la red.