A motor statikus mechanikai jellemzői a motor sebességének függését. w = ¦ (M). Szinte minden elektromos motornak van olyan tulajdonsága, hogy sebességük a motor nyomatékának csökkenő funkciója. Ez vonatkozik az összes hagyományos ipari motorra, azaz az önálló, egymást követő és kevert gerjesztésű egyenáramú motorokra, valamint az aszinkron kefe nélküli és kollektor AC motorokra. Azonban a fordulatszám változása a nyomatékváltozással változó a különböző motoroktól, és az úgynevezett merevség mechanikai jellemzőik.
A hajtás mechanikai jellemzőinek merevsége- az elektromotoros eszköz által kifejlesztett pillanatfelvételek aránya, amikor a sebesség változik, és az elektromos hajtás szögsebessége közötti különbségre:
![]()
A munkaterületeken általában a motorok mechanikai jellemzői negatív β-merevséggel rendelkeznek<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
A mechanikai jellemző merevsége geometriai értelemben a motor mechanikai jellemzőinek meredeksége.
Ha összehasonlítjuk az 1. és 2. jellemzőt, akkor az 1-es karakterisztika lágyabb lejtése kisebb
DM 1\u003e DM 2 Þ b 1\u003e b 2, mivel és.
Az elektromos motorok mechanikai jellemzői négy fő kategóriába sorolhatók:
1. Teljesen merev mechanikai jellemző (β = ∞) olyan jellemző, amelyben a sebesség változása a pillanatban változatlan marad. A szinkronmotorok ezt a jellemzőt mutatják (az 1. ábrán egyenes vonal).
2. Merev mechanikai jellemző - Ez egy olyan jellemző, amelyben a sebesség változása a pillanatban, bár csökken, de kis mértékben. A merev mechanikai jellemzők független gerjesztésű egyenáramú motorokat, valamint a mechanikai jellemzők működési részén belül aszinkronmotorokat tartalmaznak (2. ábra az 1. ábrán).
Egy aszinkron motor esetében a mechanikai jellemző különböző pontjain mért merevség eltérő. Az Mk, d motor és az Mk generátor pillanatok maximális (kritikus) értékei között az indukciós motor jellemzője viszonylag nagy merevséggel rendelkezik.
 3. Lágy mechanikai jellemző - Ez a jellemző, amelyben a sebesség változása jelentősen változik. Ez a karakterisztika egyenáramú, egymást követő gerjesztésű motorral rendelkezik, különösen a kis momentumok zónájában (3. ábra a 3. ábrán). Ezeknél a motoroknál a merevség nem változik a jellemzők minden pontján.
3. Lágy mechanikai jellemző - Ez a jellemző, amelyben a sebesség változása jelentősen változik. Ez a karakterisztika egyenáramú, egymást követő gerjesztésű motorral rendelkezik, különösen a kis momentumok zónájában (3. ábra a 3. ábrán). Ezeknél a motoroknál a merevség nem változik a jellemzők minden pontján.
A mechanikai jellemzők merevségétől függően a kevert gerjesztésű egyenáramú motorok hozzárendelhetők a második vagy harmadik csoporthoz.
4. Teljesen puha mechanikai jellemző (β = 0) olyan jellemző, amelyben a motor nyomatéka a szögsebesség változásával változatlan marad. Ez a jellemző például egyenáramú motorok, amelyek önálló gerjesztésűek, amikor áramot kapnak áramforrásból, vagy zárt hajtásrendszerben működnek az armatúraáram-stabilizáló üzemmódban (egyenes vonal a 2. ábrán).
A munkagép mechanikai jellemzői - a munkagép sebességének az ellenállás pillanatától való függése, melyet w = (M s) képez.
A mechanikai jellemzők leírják a hajtás terhelését.
A tipikus terhelések osztályozása:
1. M ellenállás aktív momentuma = const
Példa: daru csörlő meghajtó.

A terhelés képes a mechanizmust működtetni, ezért aktívnak hívják. A szerkezeteknek rögzítőféket kell biztosítaniuk.
2. az ellenállás reaktív momentuma M = const (a pillanat állandóállóságának típusa)
Jellemző a "száraz súrlódás" mechanizmusaira.

M c = M 0 jel (w).
w\u003e 0 Þ M\u003e 0; w<0 Þ М с <0.
A reaktív pillanat a w sebességre adott reakció.
3. viszkózus súrlódás
M = α in. T ω
Az ellenállás pillanata arányos a sebességgel.

bW - viszkózus súrlódási együttható.
4. szellőztetési pillanat

M c = kw 2 jel (w).
Jellemző centrifugális ventilátorok és szivattyúk számára.
Ha bezárja a bemenetet, a terhelési pillanat csökken.
P = M c w - teljesítmény.
5. P = konst. Teljesítmény állandósága
Ahol P = const.
Gyakran használják a szerszámgépek fő hajtására (esztergálás, marás, fúrás, csiszolás és egyéb gépek).
w max ∙ M min = w min ∙ M max = const.
Fontolja meg a fordítást:
w = const, F p = const.



Gyalult géphez:
P 1 = v min ∙ F max - munkamenet, P 1 = v max ∙ F min - alapjárat.
P 1 »P 2 = const.
A motor kiválasztásának jellemzői:

Ha P 1 = 5 kW, akkor P w = 5 ∙ 100 = 500 kW.
A motor közvetlen kiválasztása a határértékek alapján a beépített motor teljesítményének dW-nál történő túlértékeléséhez vezet, ahol a D w a fordulatszám-szabályozási tartomány. Valójában a motor teljesítményét csökkenteni lehet a sebességszabályozó tartomány kiválasztásával.
A DFT esetében a HB a gerjesztési áramok sebességét szabályozza.
TÁJÉKOZTATÓ TÉMA 10
Az elektromos motorok mechanikai jellemzői
A LEKTÁR PLANJA
1. Természetes és mesterségesmechanikai jellemzőkelektromos motorok
A motor mechanikai jellemzője, függetlenül az áram típusától, a motor ω (a továbbiakban a motor) szögsebességének a motor elektromágneses nyomatékára, azaz az ω () függőségére vonatkozik.
Itt fontos megjegyzést kell tennünk: a pillanatnyi egyenletnek megfelelően, egyenletes állapotban = a motor elektromágneses nyomatéka. kiegyensúlyozott statikus pillanat (pillanat ellenállás) mechanizmus. Ez azt jelenti a motor elektromágneses pillanatának nagysága teljes mértékben a mechanizmus pillanatától függ?? minél nagyobb a mechanizmus fékezési nyomatéka, annál nagyobb a motor nyomatéka, és fordítva.
Ez az, bármely motor esetében a bemeneti mennyiség a mechanizmus pillanatát és a kimenetet jelenti?? a sebessége
A szinte minden villamos motor sebessége a motor nyomatékának csökkenő függvénye, azaz a nyomaték növekedésével csökken a sebesség [33]. De a különböző elektromos motorok sebességének változása más és más paraméterrel jellemezhető merevség mechanikai jellemzői.
merevség a hajtás mechanikai jellemzői β ez a motor különböző elektromágneses pillanatai közötti különbség aránya az elektromos hajtás szögsebességének megfelelő különbségéhez.
β = (M 2 M 1) / (ω2 ?? ω1) = Δ / Δω
A munkaterületeken általában az elektromos motorok mechanikai jellemzői negatív β-merevséggel rendelkeznek< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Vannak természetes és mesterségesmechanikai jellemzőkés elektromos motorok.
Természetes mechanikai jellemzők? ez az ω () függőség, amit normálisan veszünk a motor működési feltételei, azaz névleges paramétereknél hálózati és további ellenállások hiányaa motor tekercselésében.
A tápegység paraméterei: állandó áramnál? feszültség AC? feszültség és frekvencia.
Jellemzők szerint meghatározott feltételek más, mint a szokásos, úgynevezett mesterséges.
A mesterséges jellemzők a motorparaméterek megváltoztatásával érhetők el, például úgy, hogy ellenállásokat vezetünk be egy egyenáramú motor armatúr tekercselő körébe, vagy egy indukciós motor forgórész-tekercselő körébe, vagy megváltoztatjuk a hálózati tápellátás paramétereit, azaz AC feszültség és frekvencia.
Minden elektromos motornak van egy természetes és sok mesterséges jellemzőit. A mesterséges jellemzők száma a szabályozóelem lépéseinek számától függ, például az egyenáramú motor armatúra tekercselőkörében lévő szabályozó reosztát lépések számától. Ha a motornak ilyen lépése van? öt, akkor ez a motor hat jellemzővel rendelkezik? öt mesterséges és egy természetes.
Mesterséges mechanikai jellemzőket használnak fel a motor ilyen működési feltételeinek eléréséhez, mint fordulatszám-szabályozás, fordított, elektromos fékezés stb.
Tekintsünk természetesens a motorok mechanikai jellemzőikülönböző típusok.
Ábra. 10.1 A szinkron motor természetes mechanikai (a) és szögletes (b) jellemzői; θ a forgórész tengelyének késleltetési szöge az állórész tekercs mágneses tér tengelyétől
A szinkron motor természetes mechanikai jellemzői
Természetes mechanikaivonás szinkron motor(10.1a. ábra) ?? teljesen kemény?? ez az jellemzőa sebesség a pillanatnyi változással nem változikmerevsége (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C A szinkronmotor forgórész sebességének stabilitását a szinkronmotor motor () szögbeli jellemzői az alábbiak szerint magyarázzák (10.1. Ábra b), ha a mechanikus terhelést nem a forgórészre alkalmazzák, akkor a forgórész tengelyei és az állórész tekercs forgó mágneses mezője egybeesik. θ = 0 ° (0 pont a 10.1. ábrán b). Ha a motor elektromágneses momentuma M = 0, akkor a motor üresjáratban üzemel.
Ha mechanikus terhelést alkalmaz a motor tengelyére és növeli azt, akkor a forgórész a mechanikus terhelés hatására növekvő szögben lemarad az állórész tekercsének mágneses mezőjéről.
Minél nagyobb a mechanikus terhelés a tengelyen, annál nagyobb ez a szög, és annál nagyobb a motor forgó elektromágneses nyomatéka.
ezt a nyomaték egyidejű növelése motor, a mechanizmus féknyomatékának növekedése okozta csak biztosítja a motor fordulatszámának stabilitását (a 10.1. ábrán a 0-tól = = -ig terjedő jellemzők diagramja).
A motor fordulatszámának állandósága mindaddig fennmarad, amíg a θ \u003c90 ° szög. Θ = 90 ° -nál a motor kritikus (maximális) pillanatot (A pont a 10.1. Ábrán) alakít ki.
Ha θ = 90 ° újra a mechanikai terhelés növeléséhez (θ\u003e 90 °), a motor elektromágneses nyomatéka csökken (a szög karakterisztika AB szegmense), azaz ez a pillanat kisebb lesz, mint a mechanizmus fékezési ideje. Ennek eredményeképpen a motor forgórész sebessége csökken, és a végén a rotor leáll.
Mivel a forgórész sebessége kisebb, mint az állórész tekercsének forgó mágneses mezője, azt mondják, hogy a motor ki van zárva a szinkronból.
Amint az a motor szögei jellemzőiből következik, a szinkronizáció motorveszteségének állapota: θ≤90 °.
A gyakorlatban a névleges szög θ = 20 ... 40 °.
A szinkronmotorok hatóköre: hajókon? az evezős elektromos motorok a csavarokat forgatják; a parton? erőteljes mechanizmusok, pl. kompresszorok vezetése a gázszivattyúállomásokon.
Egy egyenáramú motor természetes mechanikai jellemzői
természetes a dc motor mechanikai jellemzőipárhuzamos gerjesztés (8.5. ábra)?hát ő, mert a keménysége
β = Δ / Δω ≤ 10%.

Ábra. 10.2 Természetes a DC párhuzamos gerjesztő motor mechanikai jellemzői
Ez azt jelenti, hogy a motor elektromágneses nyomatékának változása széles tartományban változik, a sebessége meglehetősen stabil (azaz csak kis mértékben változik).
Az ilyen motorokat akkor használják, ahol, amikor a mechanizmus terhelése széles tartományban változik, a motor fordulatszáma nem változhat drámaian? elektromos szivattyúkban, ventilátorokban stb.

Ábra. 10.3 Természetes mechanikai jellemződC motoros gerjesztés
természetes a szekvenciális gerjesztésű egyenáramú motor mechanikai jellemzői. 10.3) ?? lágy mert a merevsége
β = Δ / Δω\u003e 10%.
Ez azt jelenti, hogy a motor elektromágneses nyomatékának változásakor, még kis határok között is, a sebessége jelentősen változik.
Emelje vissza a motor két kiemelkedő tulajdonságát. DC motoros gerjesztés:
a motor fordulatszáma drámai módon növekszik, a motor "fut." Ezért ez a motor nem hagyható terhelés nélkül a tengelyre;
Ezeket a motorokat nem hajókon használják, hanem partra használják, például elektromos szállításban, különösen trolibuszokban, ahol nem maradnak terhelés nélkül a tengelyen, és ahol nagy kiindulási pontokra van szükség (a trolibusz indításakor).

Ábra. 10.4 Természetes vegyes gerjesztésű egyenáramú motorok mechanikai jellemzői: 1 s párhuzamos szekvenciális gerjesztés;
2 - egymás után párhuzamos gerjesztés
természetes a kevert gerjesztésű egyenáramú motor mechanikus jellemzője a párhuzamos és egymást követő gerjesztésű motorok jellemzői között van a gerjesztés mágneses fluxusát mindkét tekercs együttes működése hozza létre? párhuzamos és következetes.
Kétféle kevert gerjesztésű motor létezik:
2. következetesen párhuzamos gerjesztés, amelyben az eredményül kapott mágneses fluxus fő része egy soros tekercseléssel jön létre (legfeljebb 70%, a fennmaradó 30%).párhuzamosan).
Ezért az első típusú motor mechanikai jellemzőinek grafikonja merevebb, mint a második típusú motor.
Mindkét mechanikai jellemző?? lágy mert a merevségük
β = Δ / Δω\u003e 10%.
A hajókon vegyes gerjesztésű motorokat használnak a vezérelt elektromos hajtásokban? csörlők, daruk, szélvédők és tornyok.
Az aszinkron motor természetes mechanikai jellemzői
természetes az aszinkron motor mechanikai jellemzői két részből állnak? nem működő (gyorsító) AV és működő repülőgépekD (8.8. Ábra).

Ábra. 10.5 Természetes az aszinkron motor mechanikai jellemzői
A motor elindításakor a kiindulási pillanat alakul ki(OA szegmens), amely után az ABC pályán halad a C. pontig. Ugyanakkor mind a sebesség, mind a nyomaték az AB szegmensben növekszik, és a B pontban a motor a maximális nyomatékot fejleszti.. A nap szegmensében a sebesség tovább növekszik, és a pillanat csökken a névleges értékre (C pont). A telekBC túlterhelt motormert bárhol ezen a területen a motor elektromágneses momentuma több, mint a névleges (> >).
Normál körülmények között a motor a C szakaszban futD amelynek merevsége
β = Δ / Δω < 10%.
Ez azt jelenti, hogy amikor a nyomaték széles tartományban változik, a motor fordulatszáma kissé változik.
Az aszinkron motorok megtalálják a legszélesebb alkalmazást a váltakozó áramú erőművel rendelkező hajókon.
Az ipar kifejezetten különböző sorozatú aszinkron motorokhoz, például 4A ... OM2 (negyedik aszinkron motorok sorozata), MAP (tengeri aszinkron pólus kapcsolható), MTF (fázis rotor) stb.
Ezzel a 4A sorozatú motorokkal? egyetlen sebesség, sorozat MAP ?? két- és háromfokozatú MTF sorozat? a sebességek számát a vezérlőáramkör határozza meg (legfeljebb 5 sebesség).
A párhuzamos gerjesztő motor egy egyenáramú motor, amelynek gerjesztőtekercsét párhuzamosan csatlakoztatják az armatúra tekercselésével (1. ábra). A jellemzők figyelembe vételével az U n = const névleges feszültség az armatúra áramkörbe kerül.
Ábra. 1 - Párhuzamos gerjesztésű motor áramkör
A motor által a hálózatból fogyasztott áramot az I = I a + I c összeg határozza meg, a gerjesztési áram általában I c = (0,03 ... 0,04) I n. A motor minden jellemzőjét a gerjesztő áramkörökben állandóan ellenállásoknál távolítják el az r '= const és a horgonyok
Sebesség válasz.
Az n = f (I a) függőség U n = const és I = const
Egy elektromos motor EMF egyenletéből
![]()
![]()
Amint az a kifejezésből látható, a motor forgási sebessége két tényezőtől függ - a terhelési áram és az áramlás változásai. Ahogy a terhelés áramlása növekszik, az armatúra áramkör ellenállásának feszültségesése nő, és a motor fordulatszáma csökken.
Az armatúra keresztirányú hatása demagnetizálja a motort A növekvő árammal az a csökkenti az áramlást, és ezzel növeli a motor fordulatszámát. Így mindkét tényező a gép fordulatszámaival szemben hat, és a sebességtípust a nettó hatásuk határozza meg.
Az 1. ábrán A 2. ábra három különböző motorfordulatszám-jellemzőt mutat (1., 2., 3. görbék). 1. görbe - sebességhatás a hatás előfordulásával I a ∑r, 2. görbe - mindkét tényező megközelítőleg kiegyensúlyozott, 3. görbe - az armatúra reakció demagnetizáló hatásának tényezője érvényes.

Ábra. 2 - Párhuzamos gerjesztési motor jellemzői
Mivel a valódi motorokban a fluxus Φ változása jelentéktelen, a sebességválasz csaknem egyenes. Számos modern, párhuzamos gerjesztésű gépen, amelyek kompenzálják az armatúra keresztirányú hatását, egy további stabilizáló mezőtekercs kerül beépítésre, amely teljesen vagy részben kompenzálja az armatúra reakció hatását.
A görbe 1 alakjának jellemzője a sebesség-jellemző normál alakja, amelyen a motor stabil működése biztosított.
A jellemző meredekségét az aturer armatúra áramkör ellenállásának nagysága határozza meg anélkül, hogy figyelembe venné az armatúra reakcióját. Ha a kiegészítő horgonylánc ellenállását nem tartalmazza, akkor a karakterisztikát természetesnek nevezik. A párhuzamos gerjesztő motor természetes jellemzője meglehetősen merev. Általában, ahol n o az üresjárat fordulatszáma. Ha az armatúra áramkörben R rg további ellenállás van, a jellemzők meredeksége nő, „puha ”vá válnak, és mesterséges vagy reostatikusnak nevezik.
Moment jellemző - az M = f (I a) függvény r = = const, U = U n és Σr = const. A motor állandósult állapotában
m em = M 2 + M 0 = c m I a F. Ha a gép működése során az F áramlás nem változott, akkor a pillanatnyi karakterisztika közvetlen lenne (4. jellemző, 2. ábra). Valójában az Ia áram csökkenésével rendelkező ux fluxus enyhén csökken az armatúra reakció demagnetizáló hatása miatt, ezért a nyomaték jellemzője enyhén lefelé (5 görbe). A hasznos pillanat karakterisztikája az elektromágneses pillanat görbéje alatt van az alapjárat pillanatnyi értékével (6. görbe).
Jellemző hatékonyság η = f (I a) az U = U n, r = const, Σr = const tartományban kerül eltávolításra, és tipikus formája az elektromos motoroknak (7. jellemző a 2. ábrán). A hatékonyság gyorsan növekszik, amikor a terhelés az üresjárattól 0,25 P n-ig növekszik, elérte a maximális értékét P = (0,5 ... 0,75) Pn-nál, majd P = Pn-re szinte változatlan marad. Általában alacsony teljesítményű motorokban η = 0,75 ... 0,85, közepes és nagy teljesítményű motorokban η = 0,85 ... 0,94.
Mechanikai jellemzők az n = f (M) függőséget ábrázolja U = U n, I = const és Σr = const értékekben. A mechanikai jellemzők analitikai kifejezése az elektromos motor elektromotoros erő egyenletéből nyerhető

Az aktuális I és az M = C e I a F kifejezés és az aktuális érték ezen értékének helyettesítése a fenti kifejezésben
![]()
Ha figyelmen kívül hagyjuk az armatúra reakcióját, és feltételezzük, hogy a ux fluxus nem változik, akkor a párhuzamos gerjesztésű elektromos motor mechanikai jellemzői egyenes vonalakként ábrázolhatók (3. ábra), amelynek lejtése függ az áramkörben lévő armatúra R pg ellenállásától. Amikor R pr = 0, a karakterisztikát természetesnek nevezik.
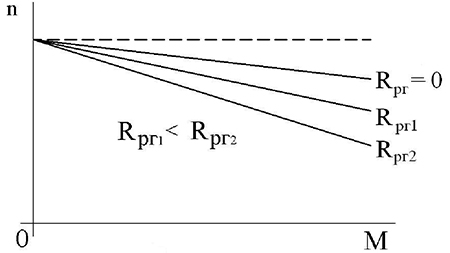
Ábra. 3 - A párhuzamos gerjesztő motor mechanikai jellemzői
Emlékeztetni kell arra, hogy ha a gerjesztő áramkör megszakad, akkor I = 0 motor fordulatszáma n → ∞, azaz a motor "versenyző", így azt azonnal le kell választani a hálózatról.