Statická mechanická charakteristika motora tzv. závislosť otáčok motora. w = | (M). Takmer všetky elektrické motory majú vlastnosť, že ich rýchlosť je klesajúcou funkciou krútiaceho momentu motora. Toto platí pre všetky konvenčné elektrické motory používané v priemysle, to znamená pre jednosmerné motory nezávislé, sekvenčné a zmiešané budenie, ako aj pre asynchrónne bezkartáčové a kolektorové striedavé motory. Avšak stupeň zmeny rýchlosti so zmenou krútiaceho momentu sa líši s rôznymi motormi a je charakterizovaný tzv tuhosť ich mechanických vlastností.
Tuhosť mechanických vlastností pohonu- je pomer momentového prírastku vyvinutého elektromotorickým zariadením pri zmene rýchlosti na zodpovedajúci rozdiel uhlovej rýchlosti elektrického pohonu:
![]()
Zvyčajne v pracovných oblastiach majú mechanické charakteristiky motorov negatívnu tuhosť β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Tuhosť mechanickej charakteristiky v geometrickom zmysle je sklon mechanickej charakteristiky motora.
Ak porovnávame charakteristiky 1 a 2, potom charakteristika 1 je mäkšia, pretože jeho svah je menší
DM 1\u003e DM 2 Þ b 1\u003e b 2, pretože a.
Mechanické vlastnosti elektrických motorov možno rozdeliť do štyroch hlavných kategórií:
1. Absolútne tuhá mechanická charakteristika (β = ∞) je charakteristika, pri ktorej rýchlosť so zmenou momentu zostáva nezmenená. Synchrónne motory majú túto charakteristiku (priamka 1 na obrázku 1).
2. Pevná mechanická charakteristika - To je charakteristika, v ktorej rýchlosť so zmenou v okamihu, aj keď sa znižuje, ale v malej miere. Pevné mechanické charakteristiky majú jednosmerné motory so samostatným budením a tiež asynchrónne motory v pracovnej časti mechanických charakteristík (krivka 2 na obrázku 1).
Pre asynchrónny motor je tuhosť v rôznych bodoch mechanickej charakteristiky odlišná. Medzi maximálnymi (kritickými) hodnotami momentov v režime motora Mk, d a generátora Mk, g má charakteristika indukčného motora relatívne vysokú tuhosť.
 3. Mäkká mechanická charakteristika - Toto je charakteristika, pri ktorej sa rýchlosť výrazne mení pri zmene momentu. Táto charakteristika má DC motor s postupným budením, najmä v oblasti malých momentov (krivka 3 na obrázku 2). Pre tieto motory tuhost nezostáva konštantná pre všetky body charakteristík.
3. Mäkká mechanická charakteristika - Toto je charakteristika, pri ktorej sa rýchlosť výrazne mení pri zmene momentu. Táto charakteristika má DC motor s postupným budením, najmä v oblasti malých momentov (krivka 3 na obrázku 2). Pre tieto motory tuhost nezostáva konštantná pre všetky body charakteristík.
Jednosmerné motory so zmiešaným budením môžu byť zaradené do druhej alebo tretej skupiny v závislosti od tuhosti mechanických vlastností.
4. Absolútne jemná mechanická charakteristika (β = 0) je charakteristika, pri ktorej krútiaci moment motora so zmenou uhlovej rýchlosti zostáva nezmenený. Táto vlastnosť má napriklad jednosmerné motory nezávislej excitácie pri napájaní zo zdroja prúdu alebo pri prevádzke v uzavretých pohonných systémoch v režime stabilizácie prúdu kotvy (priamka 4 na obrázku 2).
Mechanická charakteristika pracovného stroja - je závislosť rýchlosti pracovného stroja od momentu odporu, ktorý vytvára w = (M s).
Mechanické charakteristiky opisujú zaťaženie pohonu.
Klasifikácia typických zaťažení:
1. aktívny moment odporu M s = konst
Príklad: pohon navijaku na žeriav.

Záťaž je schopná ovládať samotný mechanizmus, preto sa nazýva aktívny. Konštrukcie musia zabezpečiť parkovaciu brzdu.
2. reakčný moment odporu M = const (zaťaženie typu stálosti momentu)
Charakteristické pre mechanizmy "suchého trenia".

Mc = znamienko M0 (w).
w\u003e 0 Þ M s\u003e 0; w<0 Þ М с <0.
Reaktívny moment je reakciou na rýchlosť w.
3. viskózne trenie
M s = α in. T ω
Moment odporu je úmerný rýchlosti.

bW - koeficient viskózneho trenia.
4. ventilačný moment

Mc = kw 2 znak (w).
Charakteristické pre odstredivé ventilátory a čerpadlá.
Ak zatvoríte prívod, moment záťaže sa zníži.
P = M c w - výkon.
5. stálosť výkonu P = const
Kde P s = const.
Často sa používa pre hlavné pohony obrábacích strojov (sústružnícke, frézovacie, vyvrtávacie, brúsne a ostatné stroje).
w max ∙ M min = w min ∙ M max = konšt.
Zvážte točenie:
w = const, F p = const.



Pre hoblovací stroj:
P 1 = v min ∙ F max - pracovný zdvih, P 1 = v max ∙ F min - voľnobeh.
P 1 »P 2 = konšt.
Vlastnosti výberu motora:

Keď P 1 = 5 kW, získame P w = 5 ∙ 100 = 500 kW.
Priamy výber motora z hľadiska medzných hodnôt vedie k nadhodnoteniu inštalovaného výkonu motora v čase D w, kde D w je rozsah riadenia rýchlosti. V skutočnosti môže byť výkon motora znížený účelovo, výberom rozsahu riadenia rýchlosti.
Pre DFT je HB regulácia rýchlosti budiacich prúdov.
TÉMA PREDMETU 10
Mechanické vlastnosti elektrických motorov
PLÁN PRAVIDIEL
1. Prírodné a umelémechanické vlastnostielektromotory
Mechanická charakteristika motora, bez ohľadu na typ prúdu, sa vzťahuje na závislosť uhlovej rýchlosti hriadeľa motora ω (ďalej len motor) na elektromagnetickom krútiacom momente motora, to znamená závislosť ω ().
Tu je potrebné urobiť dôležitú poznámku: v súlade s rovnicou momentov, v rovnovážnom stave =, elektromagnetický krútiaci moment motora vyvážené statický moment (moment om odpor) mechanizmus. To znamená, že veľkosť elektromagnetického momentu motora závisí úplne od momentu mechanizmu?? čím väčší je brzdný moment mechanizmu, tým väčší je krútiaci moment motora a naopak.
To znamená, pre každý motor je vstupné množstvo momentom mechanizmu a výstupom?? jeho rýchlosť
Rýchlosť takmer všetkých elektromotorov je klesajúcou funkciou krútiaceho momentu motora, to znamená, že so zvýšením krútiaceho momentu klesá rýchlosť [chlad 33]. Ale miera zmeny rýchlosti rôznych elektromotorov je rôzna a charakterizované parametrom mechanické vlastnosti tuhosti.
tuhosť mechanické vlastnosti pohonu β to je pomer rozdielu v elektromagnetických momentoch motora pri rôznych otáčkach k zodpovedajúcemu rozdielu uhlovej rýchlosti elektrického pohonu.
β = (M2 / M1) / (ω2 = ω1) = Δ / Δω
Zvyčajne v pracovných oblastiach majú mechanické vlastnosti elektrických motorov negatívnu tuhosť β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Tam sú prírodné a umelémechanické vlastnostia elektromotory.
Prirodzená mechanická charakteristika? to je závislosť ω (), ktorá bola prijatá pri normálnom prevádzkové podmienky motora, t.j. pri menovitých parametroch napájacie a absenciu ďalších rezistorovv reťaziach vinutí motora.
Parametre napájania obsahujú: pri konštantnom prúde? napätie pri AC? napätia a frekvencie prúdu.
Charakteristiky prijaté za podmienok iné ako bežné, nazývané umelé.
Umelé vlastnosti sa dajú získať zmenou parametrov motora, napríklad zavedením odporov do okruhu navíjania armatúry jednosmerného motora alebo do okruhu navíjania rotora indukčného motora alebo zmenou parametrov napájacieho napätia, t.j. AC napätie a frekvencia.
Každý elektromotor má jeden prírodný a veľa umelých charakteristiky. Počet umelých charakteristík závisí od počtu krokov regulačného prvku, napríklad od počtu krokov nastavovacieho reostatu v obvode navíjania armatúry jednosmerného motora. Ak má motor takéto kroky? päť, potom tento motor má šesť charakteristík? päť umelých a jeden prírodný.
Umelé mechanické charakteristiky sa používajú na získanie takých prevádzkových podmienok motora ako ovládanie rýchlosti, spätného chodu, elektrické brzdenie atď.
Zvážte prirodzenes mechanické vlastnosti motorovrôznych typov.
Obr. 10.1 Prirodzené mechanické (a) a uhlové (b) charakteristiky synchrónneho motora; θ uhol oneskorenia osi rotora od osi magnetického poľa vinutia statora
Prirodzená mechanická charakteristika synchrónneho motora
Prírodné mechanickévlastnosť synchrónny motor(obrázok 10.1a); absolútne ťažké?? to je charakteristika, pri ktorejrýchlosť so zmenou momentu sa nemeníjeho tuhosť (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C Stabilita otáčok rotora synchrónneho motora je vysvetlená uhlovými charakteristikami synchrónneho motora θ () (obrázok 10.1b), ak mechanické zaťaženie nie je aplikované na rotor, potom sú osi rotora a rotujúce magnetické pole statorového vinutia rovnaké. θ = 0 ° (bod 0 na obrázku 10.1 b). Ak je elektromagnetický moment motora M = 0, motor beží na voľnobehu.
Ak na hriadeľ motora použijete mechanické zaťaženie a zvyšujete ho, rotor pod vplyvom mechanického zaťaženia zaostáva za magnetickým poľom vinutia statora s rastúcim uhlom θ.
Čím väčšie je mechanické zaťaženie hriadeľa, tým väčší je tento uhol a tým väčší rotačný elektromagnetický krútiaci moment motora.
toto súčasné zvýšenie krútiaceho momentu engine, spôsobené zvýšením brzdného momentu mechanizmu proste zabezpečuje stabilitu otáčok motora (na obrázku 10.1 graf charakteristík od = 0 do =).
Avšak stálosť otáčok motora sa udržuje tak dlho, ako je uhol θ≤90 °. Pri θ = 90 °, motor vyvíja kritický (maximálny) moment (bod A na obrázku 10.1 a).
Ak opäť na θ = 90 ° sa zvýši mechanické zaťaženie (θ\u003e 90 °), elektromagnetický krútiaci moment motora sa zníži (segment AB uhlovej charakteristiky), t.j. tento moment bude menší ako brzdný moment mechanizmu. V dôsledku toho sa rýchlosť rotora motora zníži a nakoniec sa rotor zastaví.
Pretože rýchlosť rotora je menšia ako rýchlosť otáčavého magnetického poľa vinutia statora, hovorí sa, že motor vypadol zo synchronizácie.
Ako vyplýva z uhlových charakteristík motora, stav straty synchronizácie motora je: θ≤90 °.
V praxi je nominálny uhol θ = 20 ... 40 °.
Rozsah synchrónnych motorov: na lodiach? ako veslové elektrické motory otáčajúce skrutky; na brehu? na pohon výkonných mechanizmov, ako sú kompresory na plynových čerpacích staniciach.
Prirodzené mechanické charakteristiky jednosmerného motora
prírodné mechanická charakteristika jednosmerného motoraparalelné budenie (obrázok 8.5)?no jej, pretože jeho tvrdosť
β = Δ / Δω ≤ 10%.

Obr. 10.2 Prírodné mechanická charakteristika paralelného excitačného motora
To znamená, že pri zmene elektromagnetického krútiaceho momentu motora v širokom rozsahu je jeho rýchlosť pomerne stabilná (to znamená, že sa mení len mierne).
Takéto motory sa používajú tam, kde sa zaťaženie mechanizmu mení v širokom rozsahu, rýchlosť motora by sa nemala dramaticky meniť? v elektrických čerpadlách, ventilátoroch atď.

Obr. 10.3 Prírodné mechanické vlastnostiséria motorov s jednosmerným prúdom
prírodné mechanická charakteristika DC motora sekvenčného budenia (obr. 10.3); mäkký pretože jeho tuhosť
β = Δ / Δω\u003e 10%.
To znamená, že so zmenou elektromagnetického krútiaceho momentu motora, dokonca aj v malých limitoch, sa jeho rýchlosť výrazne mení.
Spomeňte si na dva hlavné vlastnosti tohto motora. Séria motorov s jednosmerným prúdom:
rýchlosť motora sa dramaticky zvyšuje, motor "preteká". Preto tento motor nemôže zostať bez zaťaženia na hriadeli;
Tieto motory sa nepoužívajú na lodiach, ale používajú sa na brehu napríklad v elektrickej doprave, najmä v trolejbách, kde nezostávajú bez zaťaženia na hriadeli a kde sú potrebné veľké východiská (pri štarte trolejbusu).

Obr. 10.4 Prírodné mechanické charakteristiky jednosmerných motorov so zmiešanou excitáciou: 1 s paralelné sekvenčné budenie;
2 - postupne paralelné budenie
prírodné mechanická charakteristika motora so zmiešaným budením DC je stredná medzi charakteristikami motorov paralelnej a sekvenčnej excitácie, pretože magnetický tok excitácie je vytvorený spoločným pôsobením oboch vinutí? súbežné a konzistentné.
Existujú dva typy motorov so zmiešaným budením:
2. dôsledne paralelné budenie, v ktorom je hlavná časť výsledného magnetického toku vytvorená sériovým vinutím (až do 70%, zostávajúcich 30%paralelné).
Preto je graf mechanických charakteristík motora prvého typu tuhší ako motor druhého typu.
Obidve mechanické charakteristiky?? mäkký pretože ich tuhosť
β = Δ / Δω\u003e 10%.
Na lodiach sa používajú motory so zmiešaným budením v riadených elektrických pohonoch? navijaky, žeriavy, vrátky a veže.
Prirodzená mechanická charakteristika asynchrónneho motora
prírodné mechanická charakteristika asynchrónneho motora má dve časti? nepracujúce (urýchľujúce) AV a pracovné lietadláD (obrázok 8.8).

Obr. 10.5 Prírodné mechanické vlastnosti asynchrónneho motora
Pri štartovaní motora sa rozvinie štartovací moment(segment OA) a potom urýchľuje pozdĺž trajektórie ABC na bod C. Zároveň sa zvyšuje rýchlosť a krútiaci moment v segmente AB av bode B motor vyvíja maximálny krútiaci moment, Na segmente slnka sa rýchlosť stále zvyšuje a moment klesá na nominálnu hodnotu (bod C). Na pozemkuBC motor preťaženýpretože kdekoľvek v tejto oblasti elektromagnetický moment motora je viac ako nominálny (> >).
Za bežných podmienok beží motor v sekcii CD ktorých tuhosť
β = Δ / Δω < 10%.
To znamená, že keď sa krútiaci moment mení v širokom rozsahu, otáčky motora sa mierne menia.
Asynchrónne motory našli najrozsiahlejšiu aplikáciu na lodiach s elektrickou stanicou.
Priemysel vyrába špeciálne pre lode asynchrónne motory rôznych radov, napríklad 4A ... OM2 (štvrtá séria asynchrónnych motorov), MAP (prepínateľné námorné asynchrónne póly), MTF (s fázovým rotorom) atď.
S touto sériou 4A motory? single speed, series MAP? dvoj- a trojrýchlostné série MTF? počet rýchlostí je určený riadiacim obvodom (až 5 rýchlostí).
Paralelným budiacim motorom je jednosmerný motor, ktorého budiace vinutie je paralelne spojené s navíjaním kotvy (obrázok 1). Keď sa berú charakteristiky, menovité napätie U n = const sa dodáva do okruhu kotvy.
Obr. 1 - Obvod paralelného budiaceho motora
Prúd, ktorý spotrebuje motor zo siete, je určený súčtom I = I a + I c, excitačný prúd je zvyčajne I c = (0,03 ... 0,04) I n. Všetky charakteristiky motora sa odstraňujú pri konštantných odporoch v budiacich okruhoch r = konst a kotvy
Odozva rýchlosti.
Závislosť n = f (I a) s U n = const a I in = const
Z rovnice EMF pre elektrický motor
![]()
![]()
Ako je zrejmé z výrazu, rýchlosť otáčania motora závisí od dvoch faktorov - zmeny zaťažovacieho prúdu a prietoku. Pri náraste zaťažovacieho prúdu vzrastie pokles napätia v odporu kotúčovej armatúry a rýchlosť motora klesá.
Priečna odozva armatúry demagnetizuje motor, t.j. so zvyšujúcim sa prúdom I a znižuje prietok a tým zvyšuje otáčky motora. Preto obidva faktory pôsobia vo vzťahu k otáčkam stroja a typ charakteristiky rýchlosti bude určený ich čistým účinkom.
Na obr. 2 znázorňuje tri rôzne charakteristiky otáčok motora (krivky 1, 2, 3). Krivka 1 - charakteristika rýchlosti s prevalenciou vplyvu I a Σr, krivka 2 - oba faktory sú približne vyvážené, krivka 3 - prevažuje faktor demagnetizácie reakcie kotvy.

Obr. 2 - Paralelné vlastnosti budiaceho motora
Vzhľadom na skutočnosť, že v reálnych motoroch je zmena toku Φ nevýznamná, rýchlosť je takmer rovná. Na mnohých moderných strojoch s paralelným budením na kompenzáciu vplyvu priečnej odozvy kotvy sa nainštaluje prídavné stabilizačné pole vinutia, ktoré úplne alebo čiastočne kompenzuje účinok reakcie armatúry.
Normálna podoba rýchlostnej charakteristiky, pri ktorej je zabezpečená stabilná prevádzka motora, je charakteristickým znakom tvaru krivky 1.
Sklon charakteristiky je určený veľkosťou odporu okrúhlych obvodov Σr bez zohľadnenia reakcie armatúry. Ak nie je zahrnutý dodatočný odpor v kotviacom reťazci, charakteristika sa nazýva prirodzená. Prirodzená charakteristika paralelného budiaceho motora je pomerne tuhá. Zvyčajne platí, že n o je rýchlosť otáčania pri voľnobehu. Ak je v okruhu armatúry zahrnutý dodatočný odpor R rg, sklon vlastností sa zvyšuje, stávajú sa "mäkkými" a nazývajú sa umelými alebo reostatickými.
Charakteristika momentu - je závislosť M = f (I a) s r in = const, U = U n a Σr = const. V ustálenom stave motora podľa
máme M em = M 2 + M 0 = c m I a F. Ak sa počas prevádzky stroja tok F nezmenil, momentálna charakteristika by bola priama charakteristika (charakteristika 4, obrázok 2). V skutočnosti tok Φ so znížením prúdu Ia mierne klesá v dôsledku demagnetizujúceho účinku reakcie kotvy, preto sa charakteristika krútiaceho momentu mierne sklopila nadol (krivka 5). Vlastnosť užitočného momentu sa nachádza pod krivkou elektromagnetického momentu hodnotou momentu voľnobehu (krivka 6).
Charakteristická účinnosť η = f (I a) je odstránený pri U = U n, r in = const, Σr = const a má typickú formu pre elektrické motory (charakteristika 7 na obrázku 2). Účinnosť sa zvyšuje rýchlo pri zvyšovaní zaťaženia z voľnobehu na 0,25 P n, dosahuje jeho maximálnu hodnotu pri P = (0,5 ... 0,75) P n a potom na P = P n zostáva takmer nezmenená. Zvyčajne u nízkoenergetických motorov η = 0,75 ... 0,85 av motoroch stredných a vysokých výkonov η = 0,85 ... 0,94.
Mechanické charakteristiky predstavuje závislosť n = f (M) pri U = U n, I in = const a Σr = const. Analytický výraz pre mechanické charakteristiky možno získať z rovnice elektromotorickej sily elektrického motora

Určenie prúdu I a z výrazu M = C e I a F a nahradenie tejto hodnoty prúdu vo vyššie uvedenom výraze dostaneme
![]()
Ak ignorujeme reakciu armatúry a predpokladáme, že tok Φ sa nemení, potom mechanické charakteristiky paralelného budiaceho elektromotora môžu byť reprezentované ako priamky (obrázok 3), ktorých sklon závisí od odporu R pg kotvy zahrnutého v obvode. Keď R pr = 0, charakteristika sa nazýva prirodzená.
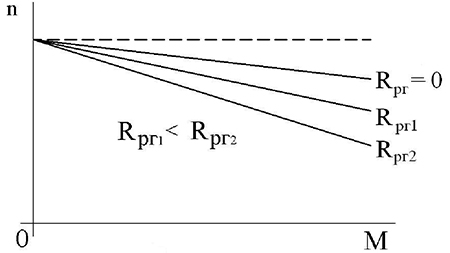
Obr. 3 - Mechanické vlastnosti paralelného budiaceho motora
Treba pamätať na to, že keď je budiaci obvod prerušený, I = 0 otáčky motora n → ∞, t. motor je "závodný", preto musí byť okamžite odpojený od siete.