Dvigatelning statik mexanik xususiyatlari Dvigatelning tezligiga bog'liqligini aytdi. w = | (M). Deyarli barcha elektr motorlar ularning tezligi vosita momentining pasayishi funktsiyasi bo'lgan xususiyatga ega. Bu sanoatda ishlatiladigan barcha an'anaviy elektr motorlar uchun, ya'ni mustaqil, ketma-ket va aralashtirilgan qo'zg'aluvchan DC motorlariga, shuningdek asinxron cho'tkasi va kollektorli AC motorlariga taalluqlidir. Biroq, moment almashinuvi tezligidagi o'zgarish darajasi turli mexanizmlar bilan farq qiladi va so'zda aytiladi qattiqlik ularning mexanik xususiyatlari.
Chalg'igan mexanik xususiyatlarining qattiqligi- elektromotor qurilmasi tomonidan ishlab chiqilgan vaqt tezligini nisbati, tezlik o'zgarganda, elektr qo'zg'aysanning burchak tezliklarida mos keladigan farq:
![]()
Odatda, ish joylarida dvigatellarning mexanik xususiyatlari salbiy bardoshlikka ega b<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Mexanik xarakteristikaning geometrik jihatdan qat'iyligi mexanik mexanik xususiyatlarning burchagi hisoblanadi.
Agar biz 1 va 2 xususiyatlarini solishtirsak, unda 1 xarakterli yumshoq bo'ladi Uning yamog'i kamroq
DM 1\u003e yassi 2 Þ b 1\u003e b 2, buyon va.
Elektr motorlarining mexanik xususiyatlari to'rt asosiy toifaga bo'linishi mumkin:
1. Albatta qattiq mexanik xarakter (b = ∞) - momentning o'zgarishi bilan o'zgarib turadigan tezlik. Sinxronlash motorlar bu xarakteristikaga ega (1-rasmda to'g'ri chiziq 1).
2. Qattiq mexanik xususiyat - Bu hozirgi o'zgarish tezligi, biroq u ozayib ketgan bo'lsa-da, bu juda oz darajada bo'lgan xarakterga ega. Mexanik xarakteristikalarning ish qismida (2-rasmda 2-sonli egri chiziq) astenxron motorlar kabi qattiq qo'zg'aluvchan mexanik xususiyatlar mustaqil harakatlanishning DC-motorlariga ega.
Vaqt mos kelmaydigan vosita uchun mexanik xarakteristikaning turli nuqtalarida qattiqlik farq qiladi. Mexanik Mk, D va generator Mk, g rejimlarida maksimal (kritik) qiymatlar o'rtasida indüksiyon motorining xarakteristikasi nisbatan yuqori qat'iylikka ega.
 3. Yumshoq mexanik xususiyat - Bu tez o'zgarish bilan tezlik o'zgaruvchanligi xususiyati. Bu xarakterli, ayniqsa, kichik momentlar zonasida (2-rasmda 3-sonli egri chastotada) ketma-ket ekskutsiyaning DC motoriga ega. Ushbu motorlar uchun qattiqlik barcha xususiyatlar uchun doimiy qolmaydi.
3. Yumshoq mexanik xususiyat - Bu tez o'zgarish bilan tezlik o'zgaruvchanligi xususiyati. Bu xarakterli, ayniqsa, kichik momentlar zonasida (2-rasmda 3-sonli egri chastotada) ketma-ket ekskutsiyaning DC motoriga ega. Ushbu motorlar uchun qattiqlik barcha xususiyatlar uchun doimiy qolmaydi.
Mexanik xarakteristikalarning qat'iyligiga qarab, aralash va qo'zg'alishga oid DC motorlari ikkinchi yoki uchinchi guruhga berilishi mumkin.
4. Albatta, yumshoq mexanik xarakter (B = 0) burchak tezligidagi o'zgarishlarni o'z ichiga olgan vosita momenti o'zgarmagan holatda bo'lgan xususiyatdir. Bu xarakteristikaga, masalan, oqim manbaidan ishlaganda yoki armatura oqimi stabilizatsiyasi rejimida yopiq haydovchi tizimlarda ishlaganda (4-rasmda to'g'ri chiziq 4) mustaqil harakatlanishning DC-motorlari mavjud.
Ish mashinasining mexanik xususiyatlari - ishchi mashinaning tezligini qarshilik paytidan boshlab, w = (M s) hosil qiladigan bog'liqligi.
Mexanik xususiyatlar chalg'igan yukini ta'riflaydi.
Odatda yuklarning tasnifi:
1. M = konstruktsiyaning M faol qarshilik momenti
Misol: vinçli vince chalg'igan.

Yuk mexanizmni o'zi bajarishi mumkin, shuning uchun uni faol deb atash mumkin. Tuzilmalar park tormozi bilan ta'minlashi kerak.
2. rezistent qarshilik momenti M = konst (momentning turg'un turdagi yuki)
"Quruq ishqalanish" mexanizmlari uchun tavsif.

M c = M 0 belgisi (w).
w\u003e 0 Þ M bilan\u003e 0; w<0 Þ М с <0.
Reaktiv moment - tezligi w ga reaktsiya.
3. viskoz ishqalanish
M bilan birga = a. T ō
Qarshilik harakati tezligi bilan mutanosib.

bW - yopishqoq ishqalanish koeffitsienti.
4. ventilyatsiya momenti

M c = kw 2 belgisi (w).
Santrifüj fanatlar va nasoslar uchun xususiyat.
Agar kirishni yopsangiz, yuk tushishi kamayadi.
P = M cv - kuch.
5. kuchning barqarorligi P = konst
Bu erda P = const.
Tez-tez ishlatiladigan dastgohlar (tornalama, frezeleme, burg'ulash, silliqlash va boshqa mashinalar) uchun ishlatiladi.
w max ∙ M min = w min ∙ M max = konst.
Aylantirishni o'ylab ko'ring:
w = const, F = sig'inish.



Mashinani rejalashtirish uchun:
R 1 = v min ∙ F maksimal ish zarbasi, R 1 = v maks F min - rölanti.
R 1 »P 2 = qurilish.
Dvigatel tanlash xususiyatlari:

R1 = 5 kV bo'lsa, biz R = = 5 ∙ 100 = 500 kVtni qo'lga kiritamiz.
Dvigatelning cheklovlar bo'yicha to'g'ridan-to'g'ri tanlanganligi D kuchiga ega bo'lgan kuchlanishni yuqori tezlik bilan o'lchashga olib keladi, bu erda D w tezlikni nazorat qilish diapazonidir. Aslida, tezlikni boshqarish oralig'ini tanlab, dvigatel kuchi maqsadga ko'ra kamayishi mumkin.
DFT uchun HB ogohlantiruvchi oqimlarning tezligini nazorat qiladi.
Dars berish mavzusi 10
Elektr motorlarining mexanik xususiyatlari
Dars rejasi
1. Tabiiy va sun'iymexanik xususiyatlarielektr motorlar
Dvigatelning mexanik xususiyati, oqim turiga qaramasdan, mexanizmi elektromagnit momentiga (ya'ni, motor) burchak tezlikining bog'liqligini, ya'ni qo'shilish ō () ga bog'liqligini anglatadi.
Bu erda muhim bir eslatma kerak: momentlar tenglamasiga muvofiq, barqaror holatida = mexanizmi elektromagnit momenti muvozanatlashgan statik moment (moment qarshilik qarshiligi) mexanizm. Bu degani mexanizmi elektromagnit momentining kattaligi butun mexanizm momentiga bog'liq?? mexanizmning tormoz momenti qanchalik katta bo'lsa, mexanizmning momenti shunchalik katta bo'ladi va aksincha.
Ya'ni, har qanday dvigatel uchun kirish miqdori mexanizmning momenti va chiqishi?? uning tezligi
Deyarli barcha elektr motorlar tezligi mexanizmi torkining pasayishi funktsiyasidir, ya'ni torkning ko'tarilishi bilan tezlik kamayadi [bolg'a. Ammo turli elektr motorlarining tezligi o'zgarish darajasi farq qiladi parametr bilan tavsiflanadi qattiqlik mexanik xususiyatlari.
Qattiqlik chalg'igan mexanik xususiyatlari β bu motorning elektromagnit momentidagi farqni turli tezliklarda elektr chovgining burchak tezliklarida mos keladigan farqga nisbatidir.
b = (M 2 M1) / (ō2 ?? ō1) = D / Dō
Odatda, ish joylarida elektr motorlarning mexanik xususiyatlari salbiy bardoshlikka ega b< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
U erda tabiiy va sun'iymexanik xususiyatlariva elektr motorlar.
Tabiiy mexanik xarakteristikasi? Bu odatdagi olingan ō () ga bog'liqdir vosita ish sharoitlari, ya'ni. nominal parametrlar bo'yicha elektr tarmoqlari qo'shimcha qarshilikning yo'qligidvigatel sariqlari zanjirlarida.
Elektr ta'minotining parametrlariga quyidagilar kiradi: doimiy oqimda? ACda kuchlanish kuchlanish va oqim chastotasi.
Sharoit ostida olingan xususiyatlar odatdagidan tashqari, sun'iy deyiladi.
Sun'iy xususiyatlar vosita parametrlarini o'zgartirish orqali, masalan, dvigatel motorining armatura sarguzashtgichi yoki indüksiyon motorining rotor sargısı pallasida, yoki tarmoq ta'minot parametrlarini o'zgartirish orqali, masalan, qarshilik mexanizmlarini o'zgartirishi mumkin. AC kuchlanish va chastotasi.
Har bir elektr qidiruvi mavjud tabiiy va juda ko'p sun'iy xususiyatlari. Sun'iy xarakteristikalarning soni regulyator elementining soniga, masalan, shahar mexanizmidagi armatura sarguzshagida sozlash reostatining bosqichlari soniga bog'liq. Agar motorda bunday qadamlar bormi? besh, undan keyin bu vosita oltita xususiyatga ega? beshta sun'iy va bitta tabiiy.
Sun'iy mexanik xususiyatlar mexanizmi bunday ish sharoitlarini tezlikni nazorat qilish, teskari, elektr tormozlash va boshqalar sifatida olish uchun ishlatiladi.
Tabiiy deb bilingb mexanizmlarning mexanik xususiyatlariturli xil turlari.
Shakl. 10.1 Sinxron motorning tabiiy mexanik (a) va burchak (b) xususiyatlari; θ stator sargının magnit maydon o'qidan rotor o'qining kechikish burchagi
Sinxron motorning tabiiy mexanik xususiyatlari
Tabiiy mexanikxarakterli sinxron vosita(10.1a rasm). juda qattiq?? Bu shunchaki xarakterli bo'lganmoment o'zgarishi bilan tezlik o'zgarmaydiuning qattiqligi (b = ∞)
β = Δ / Δω = Δ / 0 = ∞.
Agar senkron motorning rotor tezligining barqarorligi, mexanik yuk rotorga tatbiq etilmagan bo'lsa, stator sargının aylanish magnit maydoni va vertikal sariqning aylanadigan magnit maydoniga to'g'ri keladigan bo'lsa, sinxron motorning () (10.1 b) θ = 0 ° (shakl 10.1da nuqta 0). Agar motorning elektromagnit momenti M = 0 bo'lsa, vosita ishlamay qoladi.
Agar mexanik milga mexanik yuk qo'llayotgan va uning miqdorini oshiradigan bo'lsak, mexanik yukning ta'siri ostida rotor stator sarg'ishining magnit maydoniga ortib borayotgan burchakka koeffitsientida qoladi.
Milga mexanik yuk katta bo'lsa, bu burchakdan qanchalik katta bo'lsa va mexanizmi aylanadigan elektromagnit torki qanchalik katta bo'lsa.
Bunday bir vaqtning o'zida torkning ortishi vosita, mexanizmning tormoz momentini oshirish natijasida yuzaga kelgan faqatgina vosita tezligi barqarorligini ta'minlaydi (10.1-rasmda = 0 dan =) xususiyatlarining bir uchastkasi.
Biroq, vosita tezligi sobit ≤90 ° burchakka qadar saqlanadi. D = 90 ° da vosita kritik (maksimal) momentni ishlab chiqadi (10.1 a rasmda A nuqtasi).
Agar 90 = 90 ° gacha mexanik yukni (90 °) yana oshirsa, mexanizmi elektromagnit momenti kamayadi (burchak xarakteristikasining segmenti), ya'ni. bu moment mexanizmning tormoz momentidan kam bo'ladi. Natijada, dvigatelning rotor tezligi pasayadi va oxirida rotor to'xtaydi.
Rotor tezligi stator sargının aylanadigan magnit maydonining tezligidan kam bo'lgani sababli, mexanik sinxronizmdan chiqib ketgani aytiladi.
Dvigatelning burchak xususiyatlaridan keladigan bo'lsak, sinxronizmning mexanik yo'qotish holati quyidagicha: ≤≤90 °.
Amalda, nominal burchak = 20 ... 40 °.
Sinxron motorlar doirasi: kemalarda? vintlarni aylanadigan elektr motorlar kabi; qirg'oqda ?? gaz nasos stantsiyalaridagi kompressorlar kabi kuchli mexanizmlarni ishlatish.
Dvigatel motorining tabiiy mexanik xususiyatlari
Tabiiy shahar motorining mexanik xususiyatlariparallel uyg'otish (8.5-rasm).xo'sh, chunki uning qattiqligi
b = D / dō ≤ 10%.

Shakl. 10.2 Tabiiy shahar parallel qo'zg'aluvchan mexanikasining mexanik xususiyati
Bu esa, mexanik elektromagnit momentni keng diapazonda o'zgarishi bilan uning tezligi ancha barqaror (ya'ni, biroz o'zgarib turadi).
Bunday mexanizmlar mexanizmning yuki keng doirada o'zgarganda, vosita tezligi sezilarli darajada o'zgarmasligi kerak bo'lgan joyda ishlatiladi. elektr nasoslar, muxlislar va boshqalar.

Shakl. 10.3 Tabiiy mexanik xarakteristikasidvigatellar seriyasidagi qo'zg'alish
Tabiiy ketma-ket ekskutatsiyani ta'minlovchi shahar mexanizmining mexanik xususiyati (Fig. 10.3) ?? yumshoq chunki uning qattiqligi
b = A / dō\u003e 10%.
Bu mexanizmning elektromagnit momentidagi o'zgarish bilan, hatto kichik chegaralarda ham, uning tezligi sezilarli darajada o'zgaradi.
Ushbu motorning ikkita muhim xususiyatini eslang. Dvigatellar seriyasidagi qo'zg'alish:
vosita tezligi sezilarli darajada oshadi, dvigatel "poyga" qiladi. Shuning uchun, bu vosita milya ustiga yuksiz qoldirilishi mumkin emas;
Ushbu dvigatellar kemalarda ishlatilmaydi, biroq, masalan, elektr transportida, xususan, trolleybuslarda, ular milga yuklamasdan qolmaydi va katta boshlang'ich nuqtalar zarur bo'lganda (trolleybusni ishga tushirishda) foydalaniladi.

Shakl. 10.4 Tabiiy karma qo'zg'alishdagi shahar motorlarining mexanik xususiyatlari: 1 s parallel-ketma-ket keladigan qo'zg'alish;
2 - ketma-ketlik bilan parallel uyg'otish
Tabiiy karma-qo'zg'aladigan dvigatel mexanikasining mexanik xususiyati parallel va ketma-ket harakatlanish mexanizmlari orasidagi oraliqdir, chunki Harakatning magnit oqimi har ikki sarg'ishning birgalikdagi harakati bilan yaratiladi. parallel va izchil.
Aralash ta'sirlanishning ikki turdagi motorlari mavjud:
2. izchil ravishda parallel qo'zg'alish bo'lib, unda hosil bo'lgan magnit oqimning asosiy qismi bir qator sariq (70% gacha, qolgan 30%? parallel).
Shuning uchun, ikkinchi turdagi mexanizmga qaraganda, birinchi turdagi mexanik mexanik xususiyatlarining grafigi yanada qattiqroq.
Mexanik xususiyatlari ham?? yumshoq chunki ularning qattiqligi
b = A / dō\u003e 10%.
Kemalarda kemadek qo'zg'alish mexanizmi boshqariladigan elektr drayvlarda ishlatiladi. vinchilar, kranlar, shamshaflar va shpilkalar.
Asenkron motorning tabiiy mexanik xususiyatlari
Tabiiy asenkron motorning mexanik xususiyatlari ikki qismdan iborat. ishlamaydigan (tezlashtiruvchi) AV va ishchi samolyotlarD (rasm 8.8).

Shakl. 10.5 Tabiiy asenkron motorning mexanik xarakteristikasi
Dvigatelni ishga tushirishda dastlabki vaqt rivojlanadi(segment OA), undan keyin ABC traektori bo'ylab S nuqtasiga tezlashadi. Shu bilan birga, Evropa Ittifoqi segmentida tezlik va tork ortadi va B nuqtada eng yuqori tork. Quyosh segmentida tezlikni oshirish davom etmoqda va nominalga (nuqta C) tushib ketadi. U yerdaBC vosita haddan tashqari yuklanganchunki Ushbu sohada har qanday joy vosita elektromagnit momenti nominaldan ko'p (> >).
Oddiy sharoitlarda, vosita C qismida ishlaydiD qat'iyligi
β = Δ / Δω < 10%.
Bu esa, torkun keng dekabrida o'zgarib, vosita tezligi bir oz farq qiladi.
Asenkron motorlar AC elektr stantsiyasiga ega kemalarda eng keng dasturni topdi.
Sanoat ayniqsa, 4A ... OM2 (to'rtinchi asenkron motorlar seriyali), Map (dengiz asenkron kutup o'zgarishi mumkin), MTF (fazli rotorli) va boshqalar kabi kemalarning asinxron motorlari uchun maxsus ishlab chiqaradi.
Ushbu seriyali 4A motorlar bilan? yagona tezlik, seriya xaritasi? ikki va uch tezlikli MTF seriyali? tezlikni nazorat qilish davri (5 tezlikka qadar) bilan aniqlanadi.
Parallel qo'zg'alish vositasi - qo'zg'atuvchi sarg'ish armatura sargisi bilan parallel ravishda bog'langan bir shahar mexanizmi (1-rasm). Xarakteristikalarni hisobga olgan holda nominal kuchlanish U n = konstruktsiya armatura platasiga etkaziladi.
Shakl. 1 - Parallel qo'zg'alish vosita davri
Dvigatel tomonidan tarmoqdan iste'mol qilinadigan oqim I = I a + I v summa bilan belgilanadi, kuchlanish oqimi odatda I c = (0,03 ... 0,04) I n. Dvigatelning barcha xarakteristikalari r v = konstruktsiya va zanjirlardagi qo'zg'alish davridagi doimiy qarshiliklarda chiqariladi
Tezkor javob.
N = f (I a) ga bog'liqlik, U n = const va I ning = const bilan bog'liqligi
Elektromagnit motor uchun EMF tenglamasidan
![]()
![]()
Ifodadan ko'rinib turganidek, dvigatelning aylanish tezligi ikkita omilga bog'liq: yuk oqimi va oqimining o'zgarishi. Yuk oqimi oshib borishi tufayli, armatura devoridagi qarshiligidagi kuchlanish pasayadi va vosita tezligi pasayadi.
Armaturaning oqsoqol harakati vositani aniqlaydi, ya'ni. borayotgan oqim I bilan oqimni pasaytiradi va shuning uchun vosita tezligini oshiradi. Shunday qilib, ikkala omil ham mashinaning inqiloblari bilan bog'liq bo'lib, ularning tezligi xarakteristikasi ularning aniq ta'siri bilan aniqlanadi.
Shakl. 2, uch xil vosita tezligi xususiyatlarini ko'rsatadi (egri 1, 2, 3). I ta'sirning tarqalishi bilan 1 - chastotali xarakterli chiziqni egallash, 2 - har ikkala omil ham taxminan muvozanatlashgan, 3 - egri chiziqli reaksiya ta'sirini demagnetizatsiya qiluvchi omil ustunlikka ega.

Shakl. 2 - Parallel qo'zg'alish mexanizmi xususiyatlari
Haqiqiy dvigatellarda PH oqimining o'zgarishi sezilarli emasligi tufayli, tezkor javob deyarli tekis chiziq. Armaturaning transvers reaktsiyalariga ta'sirini bartaraf etish uchun parallel qo'zg'aluvchan zamonaviy zamonaviy mashinalar bo'yicha armatura reaktsiyasining ta'sirini to'liq yoki qisman qoplaydigan qo'shimcha stabillashadigan soha o'rni o'rnatilgan.
Dvigatelning barqaror ishlashi ta'minlanadigan tezlikning xarakteristikasining normal shakli egri shaklining xarakteristikasi 1.
Xarakteristikaning burchagi armatura reaktsiyasini hisobga olmaganda armatura devorining qarshilik kattaligi bilan aniqlanadi. Zanjir zanjiriga qo'shimcha qarshilik kiritilmasa, xarakteristik tabiiy deb ataladi. Parallel harakatlanish mexanizmi tabiiy xarakteristikasi juda qattiq. Odatda qaerda u rölantide harakat qilish tezligi. Armatura platasiga qo'shimcha qarshilik qo'shilsa, xarakteristikaning nishagi kuchayadi, ular "yumshoq" bo'lib, sun'iy yoki reostatik deyiladi.
Moment xarakterli - R = = const bilan U = U n va rr = const bilan M = f (I a) bog'liqligi. Dvigatelning barqaror holatiga ko'ra
bizda M em = M 2 + M0 = c m I F bo'lgan. Agar mashinaning ishlashi davomida oqim F o'zgarmasa, u holda xarakteristikaviy moment to'g'ridan to'g'ri bo'ladi (4, 2-rasm). Darhaqiqat, oqim I ning pasayishi bilan oqi F ni armatura reaktsiyasining demagnetizatsiyalash harakati tufayli bir oz pasayadi, shuning uchun Turkning xarakteristikasi biroz pastga egilib (egri 5). Foydali momentning xarakteristikasi elektromagnit momentning egri bo'shligidan pastda, bo'sh turgan momentning qiymatiga bog'liq (egri 6).
Xarakterli samaradorlik ē = f (I a) U = U n, r = const, rr = const da chiqariladi va elektr motorlari uchun odatda bir shaklga ega (2-rasmda xarakterli 7). Raqamdan 0,25 P n ga ko'tarilgan yuk ko'tarilishi bilan samaradorlik tez sur'atlar bilan o'sib boradi, P = (0,5 ... 0,75) P ning maksimal qiymatiga etib boradi va keyin P = P n deyarli o'zgarishsiz qoladi. Odatda kam quvvatli dvigatellarda ē = 0,75 ... 0,85, o'rta va yuqori quvvatli dvigatellarda ē = 0,85 ... 0,94.
Mexanik xarakteristika U = U n, I = const va rr = constdagi n = f (M) ga bog'liqligini ifodalaydi. Mexanik xususiyatlar uchun analitik ifodani elektr motorining elektromotor kuchi tenglamasidan olish mumkin

Hozirgi I va M = C ga I F ni ifodalash va yuqoridagi ifodadagi oqimning bu qiymatini almashtirishga erishamiz.
![]()
Agar armatura reaktsiyasini e'tiborsiz qoldiradigan bo'lsak va oqim PH o'zgarmasligini nazarda tutsak, parallel-ishlaydigan elektr mexanizmi mexanik xarakteristikalari to'g'ri chiziqlar sifatida ifodalanishi mumkin (3-rasm), uning burchagi bog'langan armatura R pg-ga bog'liq. R pr = 0 bo'lsa, xarakteristik tabiiy deb ataladi.
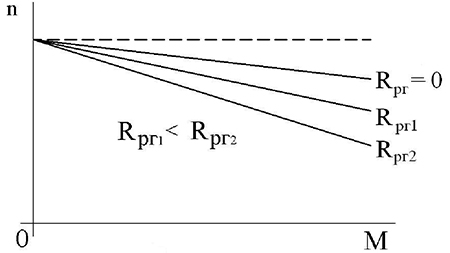
Shakl. 3 - Parallel harakatlanish mexanizmining mexanik xususiyatlari
Shuni esda tutish kerakki, qo'zg'alish davri buzilganida I = 0 vosita tezligi n → ∞, ya'ni vosita "poyga" dir, shuning uchun uni darhol tarmoqdan uzib qo'yish kerak.