Casi todas las máquinas están equipadas con motores asíncronos como accionamiento eléctrico. Tienen un diseño simple y no de alto costo. En este sentido, es importante controlar la velocidad del motor asíncrono. Sin embargo, en el circuito de conmutación estándar, sus revoluciones se pueden controlar solo con la ayuda de sistemas de transmisión mecánica (cajas de engranajes, poleas), lo que no siempre es conveniente. El control eléctrico de la velocidad del rotor tiene más ventajas, aunque complica el diagrama de cableado de un motor de inducción.
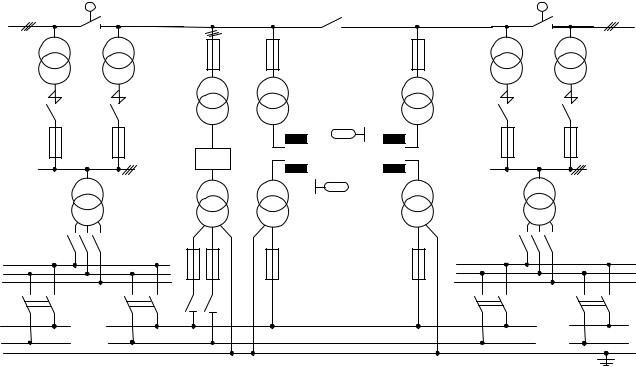
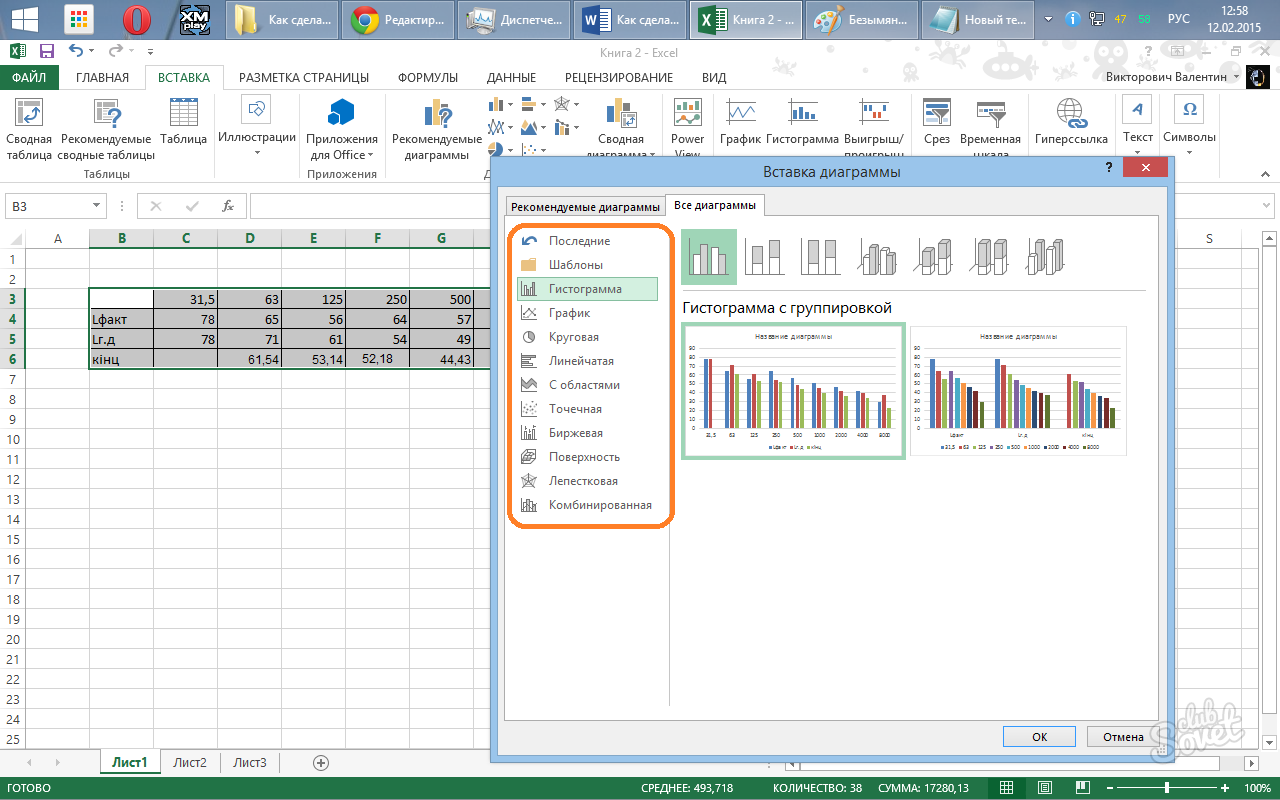
Para algunos componentes del equipo automático, la regulación eléctrica de la velocidad de rotación del eje de un motor eléctrico asíncrono es adecuada. Esta es la única forma de lograr un ajuste suave y preciso de los modos de operación. Hay varias formas de controlar la velocidad de rotación mediante la manipulación de la frecuencia, el voltaje y la forma de la corriente. Todos se muestran en el diagrama.
De los métodos presentados en la figura, el más común para regular la velocidad del rotor es el cambio de los siguientes parámetros:
Los dos últimos métodos le permiten cambiar la velocidad de rotación sin una disminución significativa en la eficiencia y la pérdida de potencia, los otros métodos de ajuste contribuyen a una disminución en la eficiencia proporcional a la cantidad de deslizamiento. Pero esos y otros tienen sus ventajas y desventajas. Dado que los motores asíncronos con un rotor de jaula de ardilla se utilizan con mayor frecuencia en la producción, todas las discusiones posteriores se referirán a este tipo de motores eléctricos.
Para regulación de frecuencia Principalmente se utilizan convertidores semiconductores. Su principio de funcionamiento se basa en las peculiaridades del motor asíncrono, donde la frecuencia de rotación del campo magnético del estator depende de la frecuencia de la tensión de alimentación. La velocidad de rotación del campo del estator está determinada por la siguiente fórmula:
n1 = 60f / p, donde n1 es la frecuencia de rotación del campo (rpm), la frecuencia f de la red de suministro (Hz), p es el número de pares de polos del estator, 60 es el coeficiente de recálculo de la dimensión.
Para un funcionamiento eficiente de un motor asíncrono sin pérdida, es necesario cambiar la tensión suministrada junto con la frecuencia. El voltaje debe cambiar dependiendo del momento de carga. Si la carga es constante, entonces el voltaje cambia en proporción a la frecuencia.
Los reguladores de frecuencia modernos le permiten reducir y aumentar la velocidad en una amplia gama. Esto aseguró su uso generalizado en equipos con tracción controlada, por ejemplo, en máquinas de contacto múltiple de malla soldada. En ellos, la velocidad de rotación del motor asíncrono, que acciona el eje de bobinado, está regulada por un convertidor de semiconductor. Este ajuste permite al operador, realizar un seguimiento de la corrección de las operaciones tecnológicas, acelerar o disminuir los pasos a medida que la máquina está sintonizada.
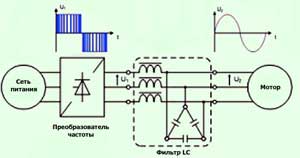
Detengámonos en el principio de funcionamiento del convertidor de frecuencia con más detalle. Se basa en el principio de doble conversión. El regulador consta de un rectificador, un inversor de impulsos y un sistema de control. En el rectificador, la tensión sinusoidal se convierte en una tensión constante y se alimenta al inversor. El inversor de impulsos trifásico de potencia tiene seis interruptores de transistor. A través de estas teclas automáticas, se aplica una tensión constante a los devanados del estator para que, en el momento adecuado, el devanado directo y la corriente inversa con un desplazamiento de fase de 120 ° lleguen a los devanados correspondientes. Por lo tanto, la tensión constante se transforma en una tensión trifásica alterna de la amplitud y frecuencia deseadas.
Los parámetros requeridos se establecen a través del módulo de control. El ajuste automático del funcionamiento de las teclas se realiza de acuerdo con el principio de modulación de ancho de pulso. Los interruptores de potencia utilizan potentes transistores IGBT. Ellos, en comparación con los tiristores, tienen una alta frecuencia de conmutación y producen una corriente casi sinusoidal con una distorsión mínima. A pesar de la practicidad de tales dispositivos, su costo para motores de potencia media y alta sigue siendo muy alto.
 Ajuste de la velocidad de rotación del método del motor asíncrono. cambios en el número de pares de polos. También se aplica a los métodos de control más comunes para motores eléctricos de jaula de ardilla. Tales motores se llaman multi-velocidad. Hay dos formas de implementar este método:
Ajuste de la velocidad de rotación del método del motor asíncrono. cambios en el número de pares de polos. También se aplica a los métodos de control más comunes para motores eléctricos de jaula de ardilla. Tales motores se llaman multi-velocidad. Hay dos formas de implementar este método:
En el primer caso, para poner bobinados adicionales en las ranuras, es necesario reducir la sección transversal del cable, y esto conduce a una disminución de la potencia nominal del motor eléctrico. En el segundo caso, existe una complicación de los equipos de conmutación, especialmente para tres o más velocidades, así como el deterioro del rendimiento energético. En más detalle, este y otros métodos para controlar la velocidad de un motor asíncrono se describen en el archivo de archivo, que se puede descargar en la parte inferior de la página.
Por lo general, los motores de varias velocidades se producen a 2, 3 o 4 velocidades de rotación, mientras que los motores de 2 velocidades se producen con un devanado en el estator y cambian el número de pares de polos en la relación 2: 1 = p2: pt, motores de 3 velocidades con dos devanados en el estator, uno de los cuales se realiza con un interruptor 2: 1 = Pr: Pi, motores de 4 velocidades - con dos devanados en el estator, cada uno de los cuales se realiza con un interruptor del número de pares de polos en la relación 2: 1. Los motores eléctricos de varias velocidades están equipados con varias máquinas, ascensores de carga y de pasajeros, se utilizan para impulsar ventiladores, bombas, etc.
Un inconveniente importante de los motores eléctricos asíncronos es la regulación relativamente compleja de la frecuencia de su rotación.
Se pueden establecer posibles formas de controlar la velocidad de rotación de los motores eléctricos asíncronos analizando la expresión registrada para la velocidad del rotor del motor: n 2 = 60f 1 (1 ‑s)/p. El análisis de la fórmula muestra que la velocidad de rotación de un motor de inducción se puede cambiar cambiando el deslizamiento del rotor sel número de pares de polos pmotor o frecuencia f 1 tensión de alimentación.
El control de frecuencia por variación de deslizamiento es posible variando el voltaje aplicado al devanado del estator o cambiando la resistencia activa en el circuito del rotor.
Control de frecuencia por cambio de resistencia activa.solo es posible para motores asíncronos con un rotor de fase, en cuyo devanado (mediante anillos de deslizamiento) se conecta una resistencia de ajuste adicional de la misma forma que cuando se arranca el motor. Sin embargo, la resistencia de arranque no es adecuada para el control de velocidad, ya que no está diseñada para un funcionamiento continuo. El ajuste de la resistencia debe soportar corrientes comparables al arranque, durante mucho tiempo.
Con un aumento en la resistencia activa del circuito del rotor, el valor del deslizamiento crítico del rotor del motor s De acuerdo con la fórmula anterior aumenta.
Incluyendo varias resistencias adicionales, es posible obtener una familia de características mecánicas del motor, como las que se muestran en la Fig. 11, de lo que se deduce que con un aumento en la resistencia activa en el circuito del rotor con un momento de carga constante en el eje del motor, el punto de operación cambia de una característica mecánica a otra, correspondiente a una nueva resistencia incrementada. Hay un aumento en el deslizamiento del rotor y, en consecuencia, una disminución en la frecuencia de rotación del rotor de un motor de inducción. La regulación con este método es posible en un amplio rango de deslizamientos, sin embargo, con una frecuencia decreciente, la rigidez de la característica mecánica se ve perturbada y las pérdidas eléctricas aumentan.
Control de velocidad cambiando la tensión de alimentación.posible debido al hecho de que el valor crítico del momento M k, y por lo tanto el valor M(s) en cualquier deslizamiento es proporcional al cuadrado de la tensión de alimentación U 1 2. Es evidente a partir de las curvas mostradas en la Fig. 12 que con un momento de carga constante en el eje del motor, el punto de operación cambia de una característica mecánica a otra, correspondiente a un nuevo voltaje reducido U 1. Hay un aumento en el deslizamiento del rotor y, en consecuencia, una disminución en la frecuencia de rotación del rotor de un motor de inducción. La regulación del motor asíncrono con este método solo es posible en un rango de deslizamiento pequeño, que está limitado por el momento crítico y el deslizamiento del rotor.
Se debe tener en cuenta que cuando el voltaje disminuye, hay una fuerte disminución en el par crítico del motor, proporcional al cuadrado del voltaje y, por lo tanto, un fuerte descenso en la capacidad de sobrecarga del motor en términos de la multiplicidad del par crítico, lo que limita el alcance de la aplicación del método descrito.
La regulación escalonada de la velocidad de rotación de un motor asíncrono con un rotor de jaula de ardilla, como se indica, es posible por cambios en el número de pares de polos.debido a la conmutación de secciones de su devanado, que se utiliza para motores de varias velocidades. La esencia del método reside en el hecho de que, a una frecuencia constante de la tensión de la red, la velocidad de rotación de un motor de inducción depende de la cantidad de pares de polos del devanado del estator. Por lo tanto, si dos o más devanados separados con diferentes números de pares de polos se colocan en el estator de un motor asíncrono, entonces cuando cada devanado se conecta a la red por separado, es posible obtener diferentes frecuencias de rotación del campo magnético y, por lo tanto, del rotor. Desafortunadamente, este método económico y relativamente simple no permite ajustar suavemente la velocidad del motor. La industria ha dominado la producción de series de motores eléctricos, cuya velocidad de rotación se regula en pasos de 2, 3 y 4 veces sin pérdida de potencia. También se debe tener en cuenta que el diseño de motores eléctricos de varias velocidades es mucho más complicado que los motores eléctricos de una sola velocidad, lo que lleva a su apreciación.
La velocidad de rotación del motor asíncrono también se puede ajustar. cambiando la frecuencia de la corriente de alimentación., pero este método prácticamente no se usa para motores potentes debido a la falta de dispositivos simples y rentables que regulen la frecuencia de la corriente en los circuitos de alta potencia. Al mismo tiempo, el desarrollo y desarrollo industrial de dispositivos semiconductores controlados potentes y económicos (diodos, tiristores) permite implementar convertidores de frecuencia simples y confiables y convertidores de potencia de bajo voltaje, con los cuales puede ajustar fácilmente la velocidad de rotación de un motor eléctrico asíncrono con un rotor de corto circuito, lo que simplifica el accionamiento de varios mecanismos, mientras que a menudo no hay necesidad de cajas de cambios, cajas de cambios, transmisiones.
Página 17 de 51
Los motores asíncronos son la base del moderno variador de velocidad. La eficiencia de este accionamiento eléctrico está determinada en gran medida por las posibilidades de regulación de velocidad.
Las capacidades de los motores asíncronos en términos de control de velocidad del rotor están determinadas por la expresión
.
De esta expresión se deduce que la frecuencia de rotación se puede ajustar de tres maneras: cambiando la frecuencia, el número de pares de polos p y resbalón s. Considere cada uno de estos métodos con más detalle.
Este método es actualmente el más prometedor. El cambio de frecuencia se realiza mediante un convertidor de frecuencia de semiconductor (Fig. 4.28, un). Simultáneamente con el cambio de frecuencia, la tensión también se regula, a fin de garantizar la constancia del flujo magnético. De la expresión relacionar el estrés con el flujo. F
,
se deduce que la tensión debe ajustarse en proporción a la frecuencia
![]() .
.
La desviación de esta ley conduce a un cambio en el flujo. FEso es indeseable. De hecho, a medida que aumenta el flujo, aumenta la saturación del circuito magnético, aumentan las pérdidas en el acero y la corriente de magnetización. La disminución del flujo provoca una disminución en el par máximo del motor y una serie de otros fenómenos indeseables.
Con ![]() Las características mecánicas del motor se muestran en la fig. 4.28, b tipo de Cuando la frecuencia disminuye, el par de arranque del motor aumenta, y el máximo disminuye ligeramente. El resbalón de trabajo del motor sigue siendo pequeño, lo que caracteriza el modo económico de funcionamiento del motor. Sin embargo, el costo de este método de controlar la frecuencia de rotación del motor es muy alto, ya que el convertidor de frecuencia debe realizarse con la potencia máxima del motor.
Las características mecánicas del motor se muestran en la fig. 4.28, b tipo de Cuando la frecuencia disminuye, el par de arranque del motor aumenta, y el máximo disminuye ligeramente. El resbalón de trabajo del motor sigue siendo pequeño, lo que caracteriza el modo económico de funcionamiento del motor. Sin embargo, el costo de este método de controlar la frecuencia de rotación del motor es muy alto, ya que el convertidor de frecuencia debe realizarse con la potencia máxima del motor.
Este método de regulación, en contraste con el anterior, permite cambiar la velocidad de rotación solo en pasos. Se utiliza en mecanismos tales como sopladores, transportadores, elevadores, elevadores. Se llaman motores con un número de pares de polos de conmutación. multi-velocidad. Normalmente, los motores asíncronos de varias velocidades se realizan con pasos de dos, tres y cuatro velocidades. Los motores de dos velocidades se fabrican con un solo devanado, si los números de los pares de polos corresponden a la siguiente relación:
.
Los motores de tres y cuatro velocidades están disponibles con dos devanados. En los motores de tres velocidades, solo se realiza un devanado al cambiar el número de pares de polos, y en los motores de cuatro velocidades, ambos devanados se realizan como los de dos velocidades. El devanado del rotor de los motores de varias velocidades está cortocircuitado. No requiere cambiar el esquema de conexión, ya que el campo del estator forma automáticamente el número requerido de pares de polos del devanado del rotor.
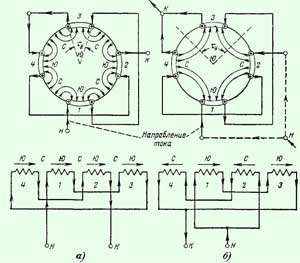
El cambio en el número de polos se realiza cambiando el esquema de conexión de las secciones de devanado del estator. En la fig. 4.29 muestra tres variantes de las secciones de conexión.
La opción "a" corresponde a la inclusión consistente de consonantes de las secciones, en este caso se forma un campo magnético con polos. En la opción "b", la segunda sección se enciende de manera no secuencial. El campo resultante tiene polos. La potencia de enrollamiento permanece sin cambios, ![]() y el momento desarrollado por el motor se reduce a la mitad,
y el momento desarrollado por el motor se reduce a la mitad, ![]() . En la opción "b", la segunda sección se activa en modo antiparalelo. El campo resultante también tendrá polos, pero la potencia del devanado
. En la opción "b", la segunda sección se activa en modo antiparalelo. El campo resultante también tendrá polos, pero la potencia del devanado ![]() Se duplica, y el par motor permanece constante.
Se duplica, y el par motor permanece constante. ![]() .
.
 |
Por lo tanto, para cambiar el número de pares de polos en relación, es necesario que cada fase del devanado consista en dos partes idénticas. Cuando ambas partes fluyen por corrientes de la misma dirección, el número de polos, cuando la dirección de la corriente cambia en una de ellas, el número de polos se reduce a la mitad. Cuando se cambia el número de polos de uno a otro, la división de polos se reduce a la mitad, y la zona de fase del devanado trifásico cambia de 60 ° a 120 ° (fig. 4.30).
Dado que la rotación de fase para ambas velocidades debe permanecer igual, además de cambiar la dirección de las corrientes en las zonas, es necesario intercambiar las dos fases del devanado. Con un mayor número de polos, el devanado se realiza en paso diametral. Luego con menos polos.
Un pequeño paso conduce a un deterioro en el uso del devanado y, en consecuencia, a una cierta disminución en el rendimiento técnico y económico del motor.
Los motores de varias velocidades están diseñados para varios modos de funcionamiento. Los modos más comunes con par constante y potencia constante. La regulación de la frecuencia de rotación con un par constante se proporciona cuando el devanado cambia de una estrella a un circuito de doble estrella (Fig. 4.31).
Con tal interruptor, la corriente consumida desde la red aumenta dos veces y, en consecuencia, la potencia del motor, mientras que el momento no cambia.
El deslizamiento de un motor de inducción se puede cambiar de diferentes maneras: cambiando el voltaje aplicado al estator, introduciendo resistencia en el circuito del rotor o introduciendo una fem adicional en el circuito del rotor.
Cuando cambia la tensión del estator, la característica mecánica del motor cambia, como se muestra en la fig. 4.33. Una disminución en la tensión conduce a una disminución en la rigidez de la característica mecánica y un aumento en el deslizamiento. Al mismo tiempo, la velocidad del rotor disminuye,
.
De esta manera, la regulación de la velocidad es posible en un rango limitado de variación del deslizamiento.
.
La principal desventaja de este método para controlar la velocidad de rotación es la baja eficiencia debido al aumento de las pérdidas en el devanado del rotor en proporción a la frecuencia de deslizamiento
.
 |
Por lo tanto, se aplica solo a los motores de baja potencia que operan en sistemas de control automático.
En motores con un rotor de fase, la velocidad de rotación se puede cambiar cambiando la resistencia en el rotor (Fig. 4.34).
La ventaja de este método de control de frecuencia es que el par máximo permanece sin cambios. También es importante tener en cuenta que parte de la pérdida del motor se lleva a cabo en una resistencia, lo que facilita el modo térmico del motor. El resto del método es similar al anterior y se caracteriza por su baja eficiencia, un pequeño rango de control, dependiendo de la carga, y una característica mecánica "blanda".
Para aumentar la eficiencia del motor al ajustar la velocidad de rotación al cambiar el deslizamiento, es necesario utilizar la potencia de deslizamiento para realizar un trabajo útil o devolverlo a la red. Los esquemas que implementan esta idea se denominan. en cascada. Uno de los circuitos comunes de este tipo es el circuito en cascada de válvulas asíncronas (Fig. 4.35).
El esquema incluye un motor asíncrono con un rotor de fase (BP), un rectificador de diodo (D), un estrangulador de suavizado (DR), un inversor de tiristores (I) y un transformador de adaptación de red (Tr). La regulación de la velocidad se realiza cambiando la tensión del inversor. Esto conduce a un cambio correspondiente en el voltaje del devanado del rotor y, por lo tanto, en la frecuencia de rotación del rotor. La potencia de la frecuencia de deslizamiento extraída del devanado del rotor del motor se transmite a la red a través de un transformador correspondiente.
La ventaja de los circuitos de control en cascada para la velocidad de rotación de los motores asíncronos en comparación con los circuitos de control de frecuencia en el circuito del estator (Fig. 4.28) es que el convertidor de semiconductores se realiza con la potencia de deslizamiento y no con la potencia total del motor. Esta circunstancia es especialmente importante para los accionamientos de alta potencia y superpotencia de bombas, prensas, transportadores, mecanismos de elevación, etc., donde se requiere un rango limitado de control de velocidad de rotación (2: 1 y menos).
La cascada de válvulas asíncronas con un rectificador no administrado permite la regulación solo hacia abajo desde la velocidad síncrona. Si utiliza un rectificador controlado, puede ajustar la velocidad desde el sincronizador. En este caso, se invierte la dirección de transferencia de la potencia de deslizamiento.