Статической механической характеристикой двигателя называется зависимость скорости от момента двигателя. w=¦(М). Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится ко всем обычным электродвигателям, применяемым в промышленности, то есть к двигателям постоянного тока независимого, последовательного и смешанного возбуждения, а также к асинхронным бесколлекторным и коллекторным двигателям переменного тока. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью их механических характеристик.
Жесткость механической характеристики электропривода – это отношение приращения момента, развиваемых электродвигательным устройством, при изменении скорости, к соответствующей разности угловых скоростей электропривода:
![]()
Обычно на рабочих участках механические характеристики двигателей имеют отрицательную жесткость β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Жесткость механической характеристики в геометрическом смысле – это наклон механической характеристики двигателя.
Если сравнить характеристики 1 и 2, то характеристика 1 более мягкая, т.к. наклон ее меньше
DМ 1 >DМ 2 Þ b 1 >b 2 , так как и .
Механические характеристики электродвигателей можно разделить на четыре основные категории:
1. Абсолютно жесткая механическая характеристика (β = ∞) - это характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис.1).
2. Жесткая механическая характеристика - это характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2 на рис.1).
Для асинхронного двигателя жесткость в различных точках механической характеристики различна. Между максимальными (критическими) значениями моментов в двигательном Мк,д и генераторном Мк,г режимах характеристика асинхронного двигателя имеет сравнительно большую жесткость.
 3. Мягкая механическая характеристика
- это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
3. Мягкая механическая характеристика
- это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
Двигатели постоянного тока смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от значения жесткости механической характеристики.
4. Абсолютно мягкая механическая характеристика (β=0) - это характеристика, при которой момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря (прямая 4 на рис. 2).
Механическая характеристика рабочей машины – это зависимость скорости рабочей машины от момента сопротивления, который она создает w=¦(М с).
Механические характеристики описывают нагрузку на электропривод.
Классификация типовые нагрузок:
1. активный момент сопротивления М с =const
Пример: привод лебедки подъемного крана.

Нагрузка способна сама приводить в действие механизм, поэтому ее называют активной. Конструкции необходимо предусмотреть стояночный тормоз.
2. реактивный момент сопротивления М с =const (нагрузка типа постоянства момента)
Характерно для механизмов типа "сухого трения".

М с =М 0 sign(w).
w>0 Þ М с >0; w<0 Þ М с <0.
Реактивный момент является реакцией на скорость w.
3. вязкое трение
М с = α в.т ω
Момент сопротивления пропорционален скорости.

bвт – коэффициент вязкого трения.
4. вентиляционный момент

М с =kw 2 sign(w).
Характерно для центробежных вентиляторов и насосов.
Если закрыть входное отверстие уменьшится момент нагрузки.
P=M c w - мощность.
5. постоянство мощности P=const
Где Р с =const.
Часто используется для главных приводов станочных механизмов (токарных, фрезерных, расточных, шлифовальных и других станков).
w max ∙M min =w min ∙M max =const.
Рассмотрим токарную обработку:
w= const, F p = const.



Для строгального станка:
Р 1 =v min ∙F max – рабочий ход, Р 1 =v max ∙F min – холостой ход.
Р 1 »Р 2 =const.
Особенности выбора двигателя:

При P 1 =5 кВт получим P дв =5∙100=500 кВт.
Непосредственный выбор двигателя по предельным показателям приводит к завышению установленной мощности двигателя в D w раз, где D w – диапазон регулирования скорости. На самом деле мощность двигателя может быть снижена специально, выбором диапазона регулирования скорости.
Для ДПТ НВ – это управление скоростью по токам возбуждения.
ТЕМА ЛЕКЦИИ 10
Механические характеристики электродвигателей
ПЛАН ЛЕКЦИИ
1. Естественные и искусственные механические характеристики электродвигателей
Механической характеристикой двигателя, независимо от рода тока, называют зависимость угловой скорости вала электродвигателя ω (далее двигателя) от электромагнитного момента двигателя, т.е зависимость ω ().
Здесь следует сделать важное замечание: в соответствии с уравнением моментов, в установившемся режиме = , электромагнитный момент двигателя уравновешивается статическим моментом (моментом сопротивления) механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной его скорость .
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода .
β = (М 2 М 1 ) /(ω2 ω1 )= Δ / Δω
Обычно на рабочих участках механические характеристикиэлектродвигателей имеют отрицательную жёсткость β < 0, так как(ω2 < ω1 ,
М 1 < М 2 ) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристик и электродвигателей .
Естественная механическая характеристика это зависимость ω(), снятая при нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе напряжение, при переменном токе напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных , называют искусственными .
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней пять, то такой двигатель имеет шесть характеристик пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественн ые механические характеристики двигателей разных типов .
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ угол отставания оси ротора от оси магнитного поля обмотки статора
Естественная механическая характеристика синхронного двигателя
Естественная механическая характеристика синхронного двигателя (рис. 10.1а) абсолютно жесткая это характеристика при которой скорость с изменением момента не изменяется , ее жесткость (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C табильность скорости ротора синхронного двигателя объясняется угловой характеристики синхронного двигателя θ() следующим образом (рис. 10.1 б), если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося магнитного поля обмотки статора совпадают, т.е. θ = 0° (точка 0 на рис.10.1 б). Если электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ротор под действием механической нагрузки станет отставать от магнитного поля обмотки статора на все больший угол θ.
Чем больше механическая нагрузка на валу, тем больше этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое увеличением тормозного момента механизма как раз и обеспечивает стабильность скорости двигателя (на рис. 10.1 а участок характеристики от = 0 до =).
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°. При θ = 90° двигатель развивает критический (максимальный) момент (точка А на рис. 10.1 а).
Если при θ = 90° вновь увеличить механическую нагрузку (θ > 90°), электромагнитный момент двигателя станет уменьшаться (отрезок АВ угловой характеристики), т.е. этот момент окажется меньше тормозного момента механизма. В результате скорость ротора двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из синхронизма такое: θ≤90°.
На практике номинальный угол θ= 20…40°.
Область применения синхронных двигателей: на судах в качестве гребных электродвигателей, вращающих винты; на берегу для привода мощных механизмов, например, компрессоров на газоперекачивающих станциях.
Естественная механическая характеристика двигателя постоянного тока
Естественная механическая характеристика двигателя постоянного тока паралельного возбуждения (рис. 8.5) ж ё сткая , потому что ее жёсткость
β = Δ / Δω ≤ 10%.

Рис. 10.2 Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточно стабильна (т.е. изменяется незначительно).
Такие двигатели применяются там, где при изменении нагрузки механизма в широких пределах скорость двигателя не должна изменяться резко в электроприводах насосов, вентиляторов и т.п.

Рис. 10.3 Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения (рис. 10.3 ) мягкая , потому что ее жёсткость
β = Δ / Δω > 10%.
Это означает, что при изменении электромагнитного момента двигателя даже в небольших пределах его скорость изменяется значительно.
Напомним две характерные особенности этого двигателя двигателя постоянного тока последовательного возбуждения :
скорость двигателя резко увеличивается, двигатель «идет вразнос». Поэтому этот двигатель нельзя оставлять без нагрузки на валу;
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты (при трогании троллейбуса с места).

Рис. 10.4 Естественные механические характеристики двигателей постоянного тока смешанного возбуждения: 1 с параллельно-последовательным возбуждением;
2 - с последовательно параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанного возбуждения промежуточная между характеристиками двигателей паралельного и последовательного возбуждения, т.к. магнитный поток возбуждения создается совместным действием обеих обмоток параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
2. с последовательно параллельным возбуждением, у которых основную часть результирующего магнитного потока создает последовательная обмотка (до 70%, остальные 30% параллельная).
Поэтому график механической характеристики двигателя первого вида более жесткий, чем у двигателя второго вида.
Обе механические характеристики мягкие , потому что их жесткость
β = Δ / Δω > 10%.
На судах двигатели смешанного возбуждения применяются в регулируемых электроприводах лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя имеет два участка нерабочий (разгонный) АВ и рабочий ВС D (рис. 8.8).

Рис. 10.5 Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент (отрезок ОА), после чего разгоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент . На участке ВС скорость продолжает увеличиваться, а момент уменьшается, до номинального (точка С). На участке BC двигатель перегружен , т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального (> >).
В нормальних условиях двигатель работает на участке С D , жесткость которого
β = Δ / Δω < 10%.
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных серий, например, 4А…ОМ2 (четвертая серия асинхронных двигателей), МАП (морской асинхронный полюсопереключаемый), МТF (c фазным ротором) и др.
При этом двигатели серии 4А односкоростные, серии МАП двух- и трехскоростные, серии МТF число скоростей определяется схемой управления (до 5 скоростей).
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение U н =const.
Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=I a +I в, ток возбуждения обычно равен I в =(0,03...0,04) I н. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения r в =const и якоря
Скоростная характеристика.
Зависимость n=f (I a) при U н =const и I в =const
Из уравнения ЭДС для электродвигателя
![]()
![]()
Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока I a уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния I a ∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.

Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно, где n o — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений R рг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика – это зависимость М=f (I a) при r в =const, U=U н и Σr=const. В установившемся режиме работы двигателя согласно
имеем M эм = M 2 +M 0 = с м I a Ф. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока I a несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (I a) снимается при U=U н, r в =const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Р н, достигает максимального значения при Р=(0,5...0,75) Р н, а затем до Р=Р н остается почти неизменным. Обычно в двигателях малой мощности η=0,75...0,85, а в двигателях средней и большой мощности η=0,85...0,94.
Механическая характеристика представляет зависимость n=f (M) при U=U н, I в =const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя

Определив ток I а из выражения М = с е I a Ф и подставив это значение тока в выражение выше, получим
![]()
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления R рг включенного в цепь якоря. При R рг =0 характеристика называется естественной.
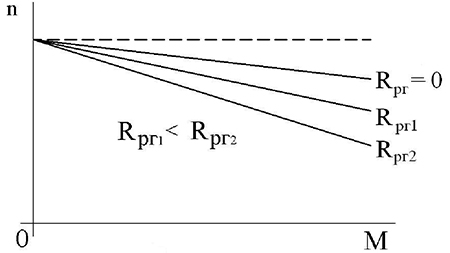
Рис. 3 — Механические характеристики двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения I в =0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.









