4-6. CÁLCULO DEL MOTOR ELÉCTRICO DC
Inicio del cálculo con un motor eléctrico. corriente continua, ya que su cálculo es más sencillo y claro que los motores eléctricos. corriente ac. Aquí hay una explicación detallada de todos los valores calculados, que luego se encontrarán en los motores de CA. El cálculo se da para motores eléctricos bipolares con excitación secuencial.
Dada la potencia, la velocidad, el voltaje del motor, puede determinar todas las dimensiones y datos de bobinado del motor eléctrico. El cálculo del motor eléctrico comienza con la determinación de las dos dimensiones principales, que son el diámetro y la longitud de la armadura. Estas dimensiones están incluidas en la fórmula:
donde D es el diámetro del anclaje, m; l es la longitud del ancla, m; R i - potencia nominal, W; A - carga lineal de la armadura, A / m; B - inducción magnética en el entrehierro, T; n - Frecuencia nominal de rotación, rpm.
La longitud y el diámetro de la armadura del motor eléctrico se expresan en metros, ya que las fórmulas de cálculo que conectan las dimensiones del motor con la inducción y el flujo son más convenientes y simples. Los resultados de los cálculos obtenidos en metros con fines prácticos de fabricación de varias piezas se pueden convertir fácilmente a centímetros o milímetros.
El lado izquierdo de la fórmula es proporcional al volumen del ancla. De hecho, si lo multiplicas por π y lo divides por 4, obtienes el volumen del cilindro, que es el ancla del motor eléctrico. Como puede verse desde el lado derecho de la fórmula, el volumen de la armadura es proporcional a la potencia del motor P i e inversamente proporcional a la frecuencia de rotación n. De esto se puede concluir que cuanto mayor sea la frecuencia de rotación de la armadura del motor, más pequeñas serán sus dimensiones con la misma potencia. Y los tamaños y otras partes del motor eléctrico dependen de los tamaños de un anclaje.
Potencia nominal del motor eléctrico, W
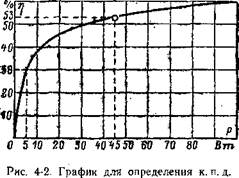
donde E es e. D. s., Inducido en el devanado de la armadura durante su rotación en un campo magnético, V; I es la corriente consumida por el motor desde la fuente, A; P es la potencia nominal del motor eléctrico, W; η es la eficiencia del motor eléctrico, cuyo valor puede tomarse a lo largo de la curva de la fig. 4-2; Como puede verse en la curva, los valores de eficiencia disminuyen al disminuir la potencia del motor eléctrico.
El valor numérico de la potencia calculada se obtiene al resolver (4-2), donde se conocen los valores de todas las cantidades. La potencia calculada siempre es mayor que la potencia nominal del motor eléctrico, ya que parte de la energía suministrada se pierde en el propio motor eléctrico.
La corriente consumida por el motor eléctrico, A,
donde P es la potencia nominal, W; Tensión nominal U, V; η es la eficiencia a lo largo de la curva en la fig. 4-2.
Ahora puedes definir y e. d. E, que será necesaria en el futuro:
donde N es el número de conductores en el devanado de armadura; el multiplicador 2 en el denominador muestra que la corriente total de armadura I de la placa colectora se bifurca entre los dos conductores de bobinado y solo la mitad de la corriente pasa a través de cada conductor; El producto πD expresa la circunferencia de la armadura.
Por lo tanto, la carga lineal muestra cuántos amperios por 1 m de longitud de la circunferencia de la armadura. La carga lineal A y la inducción magnética en el espacio de aire B se denominan cargas electromagnéticas. Muestran qué tan pesado es el motor eléctrico en términos eléctricos y magnéticos. Desde (4-1) está claro que cuanto más grande sea el producto AB, más pequeño será el anclaje. Pero los valores de A y B no deben exceder un cierto límite, porque de lo contrario el motor eléctrico estará muy caliente durante la operación.
Sin embargo, el calentamiento del motor eléctrico no solo depende de las cargas electromagnéticas, sino también del momento de su funcionamiento. Algunos motores eléctricos funcionan durante mucho tiempo sin parar, por ejemplo, los motores eléctricos de los ventiladores. Otros motores eléctricos funcionan de manera intermitente durante el cual se enfrían, por ejemplo, motores eléctricos de modelos de grúas, reproductores eléctricos, aspiradoras. El trabajo de los motores eléctricos con interrupciones se llama intermitente. Esto significa que el motor eléctrico se enciende por un corto tiempo, luego se produce una interrupción y el motor eléctrico se enciende nuevamente.
La duración de la inclusión de dicho motor eléctrico se expresa como un porcentaje de un determinado período, que se toma durante 10 minutos. Por ejemplo, si el motor eléctrico funciona durante un período de 2,5 minutos y el resto del tiempo se ha completado, el tiempo de encendido es del 25%. Si el motor funciona durante 4 minutos, la duración de la inclusión del 40%.
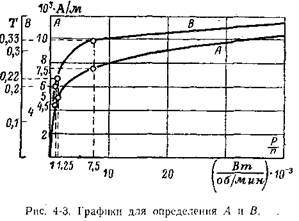
La elección de la carga lineal y la inducción magnética se realiza de acuerdo con las curvas de la fig. 4-3, donde la relación de potencia nominal a frecuencia nominal rotación En la fig. 4-3 reciben los valores de A y B para motores eléctricos con un modo de funcionamiento largo. Por ejemplo, si un motor eléctrico con una potencia de 80 W a una velocidad de 4000 rpm funciona continuamente a plena carga, entonces reservamos en el eje horizontal el valor 80/4 000 = 20 10 -3. En la línea vertical contamos el valor de la carga lineal A = 9 000 A / m y la inducción en el espacio de aire B = 0,35 T.
Con una operación intermitente con un tiempo de encendido del 25%, los valores de las cargas electromagnéticas se pueden aumentar en un 30%, es decir, tomarlas 1.3 veces más. Entonces
A = 9000 1.3 = 11 700 A / m,
y la inducción magnética
B = 0.35 1.3 = 0.455 T.
Denote por l / d = e. El valor e para motores eléctricos pequeños oscila entre 0,4 y 1,6. Si es necesario obtener un motor eléctrico con una longitud menor, pero con un diámetro mayor, entonces tomamos e = 0.4. Por el contrario, si el motor eléctrico se debe mezclar en un tubo de pequeño diámetro, elegimos e = 1.6. Si las dimensiones del motor eléctrico no están relacionadas con ninguna condición, entonces generalmente tome e = 1. Introduciendo la relación l / D = e en la parte izquierda (4-1), liberada de un desconocido l y (4-1) tiene la forma:
Definiendo D, encontramos l = De. Así, se determinan las dimensiones principales del motor eléctrico.
Pasamos ahora al cálculo del devanado de la armadura. Para ello es necesario determinar el flujo magnético del motor eléctrico.
Si la inducción magnética en el espacio de aire se multiplica por el área a través del cual las líneas de fuerza entran en el anclaje, obtenemos el flujo magnético del motor eléctrico, que se indica con la letra griega F (phi):
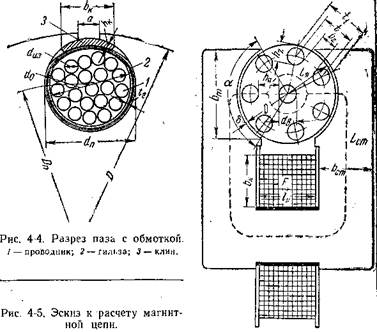
El flujo magnético se mide en weber. La letra griega τ (tau) denota la división del polo, es decir, la parte de la circunferencia de la armadura en un polo. En un motor bipolar, la división de polos es τ = πD / 2. La letra griega a (alfa) indica qué parte de la división de polos está ocupada por el arco del polo b t (Fig. 4-5). Por lo general, tomar a = 0,65. De este modo, el producto аτl da el área del polo orientada hacia el anclaje.
El número de ranuras del anclaje se determina a partir de la relación Z≈3D, en la que el diámetro del anclaje se expresa en centímetros. Se recomienda tomar el más cercano al número impar recibido. El número de conductores del anclaje está determinado por la fórmula
El número de conductores en una ranura N z = N / Z. El número N z obtenido en el cálculo debe redondearse al número entero par más cercano, para que el bobinado se pueda enrollar en dos capas. La elección del número de ranuras y el número de conductores se deducirá del ejemplo numérico del cálculo del motor eléctrico.
La sección transversal del cable para el devanado del inducido puede determinarse dividiendo la corriente en el conductor por la densidad de corriente. La densidad actual indica cuántos amperios pasan a través de cada milímetro cuadrado del cable, y se denota con la letra griega A (delta). Así, la sección transversal del alambre, mm 2,
La densidad de corriente para motores de CC de fabricación propia debe seleccionarse de 6 a 12 A / mm 2. Para motores pequeños con una alta frecuencia de rotación, la densidad de corriente se toma más cerca del valor superior recomendado. Los motores más grandes con velocidades más bajas están más cerca del valor más bajo.
Esta sección del cable es preliminar. En la segunda columna de la tabla. 4-1, debe encontrar la sección transversal del cable estándar que se acerque más al calculado. En la primera columna de esta tabla, encontramos el diámetro del alambre d. La ausencia de un cable del diámetro requerido no puede impedir la fabricación de un motor eléctrico, ya que hay grandes oportunidades para reemplazar el cable. En primer lugar, un cable puede reemplazarse por dos si la sección transversal de estos cables es la misma que la del cable que se está reemplazando. La sección transversal del cable depende del cuadrado de su diámetro, lo que significa que para un cable con una sección transversal 2 veces más pequeña, el diámetro será √ 2 veces más pequeño. Por ejemplo, en lugar de un cable con un diámetro de 0,29 mm, puede tomar dos cables con un diámetro de 0,2 mm. En este caso, la densidad de corriente casi no cambia, pero la cantidad de cables en la ranura aumentará 2 veces. La densidad de llenado de la ranura con cables también aumentará, ya que cada cable tiene un aislamiento de dos capas. Bobinar tal bobinado será más difícil. Es posible reemplazar un cable por dos con diámetros diferentes. Por ejemplo, en lugar de un cable con un diámetro de 0,29 mm, puede tomar dos cables: uno con un diámetro de 0,31 mm y el otro con un diámetro de 0,27 mm. Como se puede ver en la tabla. 4 1, la suma de las secciones transversales de los dos cables de reemplazo es igual a la sección transversal del cable que se reemplaza:
0.075 + 0.057 = 0.132 mm 2.
Escogiendo el diámetro final del alambre d, es necesario para la mesa. 4-2 determinar el diámetro alambre aislado d desde, agregando espesor de doble cara two de aislamiento:
Determine el tamaño de la ranura. La sección transversal de la ranura S, mm 2, requerida para la colocación de los conductores de bobinado se puede calcular mediante la fórmula:
donde k s es el coeficiente de llenado de la ranura, que muestra cuán apretados los conductores llenan la ranura.
Cuanto menor sea el factor de relleno, mayor debe ser el área de la ranura. Cuanto mayor sea el factor de llenado y cuanto más grueso sea el aislamiento de la ranura, más difícil será enrollar el devanado. En los motores eléctricos de fabricación propia, se recomienda aislar con un manguito de muesca 2 de un cartón de 0,2 mm de espesor. En la parte superior del devanado, una cuña 3 está hecha de cartón de 0.3 mm de espesor (fig. 4-4) en la ranura. En los cálculos, puede tomar el factor de relleno k 3 = 0,4.
En los motores eléctricos prefabricados, las ranuras tienen una forma compleja en forma de pera (ver Fig. 2-10) de modo que puedan acomodar más conductores sin debilitar el grosor de los dientes entre las ranuras. En los motores eléctricos de fabricación propia, es más fácil perforar ranuras redondas en un núcleo de armadura presionado (fig. 4-5).
El diámetro de la ranura está determinado por su sección transversal:
La distancia entre los centros de ranuras adyacentes, mm
y el espesor de un diente, mm,
El grosor del diente en un lugar estrecho debe ser de al menos 2 mm. Si, por cálculo, el grosor de los dientes es inferior a 2 mm, es necesario aumentar el diámetro de la armadura. La ranura de la ranura debe ser 1 mm más grande que el diámetro del cable aislado.
El número de placas colectoras en motores eléctricos para baja tensión (12 V e inferior) se considera igual al número de ranuras de armadura. La colocación del devanado de armadura en las ranuras y su conexión a las placas colectoras se describen en el Capítulo. 5. La sección transversal del cepillo de carbono-grafito S y, cm 2, se selecciona de acuerdo con la fórmula:
donde u - densidad de corriente debajo del cepillo ,? u = 5 ÷ 8 A / cm 2.
El cálculo del ancla termina aquí.
Pasamos al cálculo del sistema magnético y al devanado de excitación. Para un motor eléctrico improvisado, la forma más fácil es usar un sistema magnético de tipo abierto (Figura 4-5). En el cálculo, el espacio de aire δ entre el ancla y los polos se determina en primer lugar. En las máquinas de CC, el tamaño del espacio de aire está determinado por la fórmula
El ángulo del arco del polo se puede encontrar por el valor de a = 0.65. La mitad de la circunferencia es 180 °; por lo tanto, a = 180 ° 0.65 = 117 °, redondeado a 120 °.
El tamaño del circuito magnético se calcula de acuerdo con la inducción magnética recomendada en sus áreas. Al calcular la sección transversal de los polos y el marco, el flujo magnético aumenta en un 10%, ya que algunas de las líneas se cierran entre los lados del marco, sin pasar por el ancla. Por lo tanto, el flujo magnético de los polos y el marco F artículo = 1.1 F.
Inducción en el cuadro toma el artículo B = 0.5 T. Longitud línea eléctrica en el marco L st determinado por el croquis (Fig. 4-5). Aquí la línea de puntos muestra la trayectoria del flujo magnético. Consta de las siguientes secciones: dos huecos de aire, dos dientes, un ancla y una cama. Para saber cual n. c. Debe crear una bobina de excitación, es necesario calcular n. c. (Iw) para cada una de estas secciones y luego todas se doblaron. Comencemos el cálculo n. c. desde el espacio de aire.
Fuerza de magnetización de dos huecos de aire:
donde δ es el espacio de aire en un lado del anclaje, m; k δ es el coeficiente de espacio de aire que toma en cuenta cuánto aumenta la resistencia magnética del espacio de aire debido a la presencia de ranuras en el anclaje; podemos asumir k δ = 1,1; B - Inducción en el espacio de aire, T.
Para determinar n. c. Los dientes del ancla deben conocer la inducción en el diente. El grosor del diente está determinado por (4-12). El flujo magnético entra al diente a través de una parte de la circunferencia de la armadura, que está ocupada por una corona del diente y una ranura de la ranura. Se llama división dentada de t 1 y está determinada por la fórmula.
La inducción en un diente será tantas veces más que una inducción en un espacio de aire, cuántas veces el grosor de un diente es menor que una división dentada. Además, se debe tener en cuenta que parte de la longitud del anclaje está ocupada por capas aislantes entre las láminas de los anclajes de acero, que son aproximadamente el 10%. Por lo tanto, la inducción en el diente puede ser determinada por la fórmula.
Esta inducción sobre la mesa. 4-3 corresponde a la intensidad de campo H z. Para calcular n. c. dos veces la altura del diente, es necesario multiplicar Hz por la doble altura del diente. Sin embargo, dado que con las ranuras redondas la inducción en las partes superior e inferior del diente disminuye, multiplique Hz por la altura de un diente lw z = H z h z.
Al calcular la inducción en el núcleo de la armadura, se debe tener en cuenta que el flujo magnético en él es ramificado y, por lo tanto, solo la mitad del flujo se explica por una sección. Sección transversal del núcleo de la armadura según la fig. 4-5 es igual a la distancia desde la base de la ranura hasta el eje, multiplicada por la longitud de la armadura l:
También es necesario tener en cuenta las capas aislantes entre las hojas. Así, la inducción en el núcleo de la armadura.
Esta inducción sobre la mesa. 4-3 corresponde a H i. La fuerza magnetizante del núcleo de la armadura:
donde L i es la longitud de la línea de fuerza en el núcleo, m, de acuerdo con la fig. 4-5:
Como se ve en la fig. 4-5, este motor eléctrico no tiene polos sobresalientes, ya que se fusionaron con el cuadro. Por lo tanto, el cálculo de la parte fija del circuito magnético se reduce al cálculo de la cama. El ancho del marco se determina por una inducción dada B = 0.5 T, m,
La intensidad de campo Hst para la inducción 0.5 T se encuentra en la Tabla. 4-3. Al determinar la longitud de la línea de fuerza en el marco, nos encontramos con dificultad, ya que la longitud del lado del marco depende del grosor de la bobina, y todavía no lo sabemos. Por lo tanto, tomamos el espesor de la bobina b a = 30 δ, donde δ es el espacio de aire. La relación entre el espesor de la bobina y el espacio se explica por el hecho de que n depende principalmente del tamaño del espacio. c. bobina, y por lo tanto el tamaño de la bobina. Al determinar la longitud de la línea de fuerza en el cuadro L st, puede calcular n. c. camas:
Ahora añadimos n. c. todos los sitios:
Tal n. c. Debe crear una bobina cuando el motor está en ralentí. Pero bajo carga, cuando la corriente en la armadura crece, aparecerá un efecto desmagnetizador. campo magnético anclajes Por lo tanto n. c. la bobina debe tener algún margen, que se calcula por la fórmula
Así, n. c. bobinas con carga de motor
![]()
Una corriente de inducido pasará a través de la bobina de excitación y, por lo tanto, el número de vueltas de la bobina será w = Iw / I.
Para determinar la sección transversal del cable, la corriente se debe dividir por la densidad de corriente. Se toma menos que para el devanado de la armadura, ya que las vueltas de la bobina son fijas y, por lo tanto, peor refrigeradas.
Sección del cable de la bobina, mm 2, s = I /?
Según la tabla. 4-1 encontramos la sección transversal estándar más cercana y el diámetro del alambre. Haber elegido la marca de un alambre, según pestaña. 4-2 encontramos el diámetro del alambre aislado d pz. Para saber el grosor de la bobina, debe conocer el área, mm 2, ocupada por las vueltas de la bobina, que puede determinarse por la fórmula
Dividiendo el área por la longitud de la bobina, que en el boceto se designa l, obtenemos el espesor de la bobina, mm,
Entonces, de acuerdo con los datos nominales del motor eléctrico, que se expresan en solo tres números, mediante fórmulas y tablas, hemos determinado todas las dimensiones del motor eléctrico, necesarias para su fabricación. El motor eléctrico calculado funcionará de manera confiable y su calefacción no dejará las normas permisibles. Este es el valor del cálculo del motor eléctrico. ¿Sería posible "adivinar" todas estas dimensiones sin cálculos? Probablemente, el motor eléctrico tendría que ser rehecho varias veces para obtener un resultado satisfactorio, habiendo gastado varias veces más tiempo en estas alteraciones que en el cálculo, sin mencionar los materiales dañados. Además, en el proceso de cálculo obtendrá la habilidad de cálculos técnicos y el conocimiento de la teoría de los coches eléctricos.
N.V. Vinogradov, Yu.N. Vinogradov
Cómo calcular y fabricar el motor eléctrico.
Moscú 1974
Condiciones para seleccionar un motor eléctrico.
La elección de uno de los tipos de catálogo de motores eléctricos se considera correcta en las siguientes condiciones:
a) la conformidad más completa del motor eléctrico con la máquina de trabajo (accionamiento) en las propiedades mecánicas. Esto significa que el motor eléctrico debe tener una característica mecánica tal, en la cual podría informar al variador los valores necesarios de velocidad y aceleración, tanto durante el funcionamiento como durante el arranque;
b) El máximo aprovechamiento de la potencia del motor en el proceso. La temperatura de todas las partes activas del motor eléctrico en los modos de operación más severos debe ser lo más cercana posible a la temperatura de calentamiento determinada por las normas, pero no excederla;
c) la conformidad del motor eléctrico con el variador y las condiciones ambientales para el diseño;
d) Cumplimiento del motor con los parámetros de su red de suministro.
Los siguientes datos iniciales son necesarios para la elección del motor eléctrico: 
a) el nombre y tipo de mecanismo;
b) la potencia máxima en el eje motriz del mecanismo, si el modo de operación es continuo y la carga es constante, y en otros casos - gráficos de cambios en la potencia o momento de resistencia en función del tiempo;
c) la velocidad de rotación del eje motriz del mecanismo;
d) método de articulación del mecanismo con el eje del motor (en presencia de engranajes, se indica el tipo de engranaje y la relación de engranaje);
e) la cantidad de torque en el arranque, que el motor eléctrico debe proporcionar en el eje motor del mecanismo;
e) los límites de la regulación de la velocidad del mecanismo accionado con la indicación de los valores superior e inferior de las velocidades y los valores correspondientes de potencia y par;
g) la naturaleza y la calidad (suavidad, altitud) del control de velocidad requerido;
h) la frecuencia de arranque o arranque de la unidad dentro de una hora; y) características ambientales.
La elección de un motor eléctrico basado en tener en cuenta todas las condiciones se realiza de acuerdo con los datos del catálogo.
Para los mecanismos de uso general, la elección de un motor eléctrico se simplifica en gran medida por los datos contenidos en la información relevante de los fabricantes, y se reduce a especificar el tipo de motor eléctrico con respecto a los parámetros de red y la naturaleza del entorno.
Selección de potencia del motor.
La elección de la potencia del motor debe realizarse de acuerdo con la naturaleza de las cargas de la máquina que trabaja. Este personaje es evaluado por dos motivos: 
a) según el modo de funcionamiento nominal;
b) Cambios en la cantidad de energía consumida.
Existen los siguientes modos de operación:
a) largo (largo) cuando el período de trabajo es tan largo que calefacción eléctrica del motor alcanza su valor de estado estable (por ejemplo, en bombas, cintas transportadoras, ventiladores, etc.);
b) a corto plazo, cuando la duración del período de trabajo es insuficiente para alcanzar la temperatura de calentamiento del motor eléctrico correspondiente a esta carga, y los períodos de parada, por el contrario, son suficientes para enfriar el motor eléctrico a la temperatura ambiente. En este modo, los motores eléctricos pueden operar una variedad de mecanismos;
c) intermitente: con una duración relativa de activación de 15, 25, 40 y 60% con una duración de un ciclo de no más de 10 minutos (por ejemplo, en grúas, algunas máquinas, generadores de motores de soldadura de un solo operador, etc.).
De acuerdo con los cambios en el consumo de energía, los siguientes casos difieren:
a) carga constante, cuando la cantidad de energía consumida durante la operación es constante o tiene desviaciones menores del valor promedio, como, por ejemplo, para bombas centrífugas, ventiladores, compresores con flujo de aire constante, etc .;
b) carga variablecuando la cantidad de energía consumida cambia periódicamente, como, por ejemplo, en excavadoras, grúas, algunas máquinas, etc .;
c) carga pulsante, cuando la cantidad de energía consumida cambia continuamente, como, por ejemplo, en bombas de pistón, trituradoras de mandíbulas, pantallas, etc.
La potencia del motor eléctrico debe cumplir tres condiciones:
a) calentamiento normal durante el funcionamiento; 
b) suficiente capacidad de sobrecarga;
c) Par de arranque suficiente.
Todos los motores eléctricos se dividen en dos grupos principales:
a) para un modo de operación largo (sin limitar la duración de la inclusión);
b) para uso intermitente con tiempos de conmutación del 15, 25, 40 y 60%.
Para el primer grupo, en catálogos y pasaportes, la potencia continua que el motor eléctrico puede desarrollar indefinidamente está indicada, para el segundo grupo, la potencia que el motor eléctrico puede desarrollar, trabajando con interrupciones durante un tiempo indefinidamente largo con cierto tiempo de encendido.
La selección adecuada en todos los casos se considera un motor eléctrico de este tipo, que, al trabajar con la carga pero con el programa establecido por la máquina que trabaja, logra un calentamiento total permisible de todas sus partes. La elección de los motores eléctricos con el llamado "margen de potencia", basada en la mayor carga posible en el programa, lleva a una infrautilización del motor eléctrico y, en consecuencia, a un aumento de los costos de capital y operativos al reducir los factores de potencia y la eficiencia.
Un aumento excesivo en la potencia del motor también puede provocar sacudidas durante la aceleración.
Si el motor debe funcionar durante un tiempo prolongado con una carga constante o ligeramente variable, entonces determinar su potencia no es difícil y se realiza de acuerdo con las fórmulas, por lo general con coeficientes empíricos.
Es mucho más difícil elegir la potencia de los motores eléctricos de otros modos de operación.
La carga a corto plazo se caracteriza por el hecho de que los períodos de inclusión son cortos y las pausas son suficientes para completar el enfriamiento del motor eléctrico. En este caso, se supone que la carga del motor eléctrico durante los períodos de encendido se mantiene constante o casi constante.
Para que el motor eléctrico se utilice correctamente para calefacción en este modo, es necesario elegirlo de modo que su potencia continua (indicada en los catálogos) sea menor que la potencia correspondiente a la carga a corto plazo, es decir, que el motor eléctrico tenga una sobrecarga térmica durante los períodos de su trabajo a corto plazo.
Si los períodos de funcionamiento del motor eléctrico son significativamente menores que el tiempo requerido para su calentamiento completo, pero la pausa entre los períodos de encendido es significativamente más corta que el tiempo de enfriamiento completo, entonces se produce una carga a corto plazo.
Prácticamente uno debería distinguir entre dos tipos de trabajo:
a) la carga durante el período de trabajo es constante en magnitud y, en consecuencia, su gráfica se representa como rectángulos alternando con pausas;
b) la carga durante el período de trabajo varía según una ley más o menos complicada.
En ambos casos, el problema de elegir un motor eléctrico por potencia se puede resolver analítica y gráficamente. Ambos métodos son bastante complicados, por lo tanto, se recomienda prácticamente un método simplificado de grandeza equivalente, incluyendo tres formas:
a) corriente cuadrática media;
b) potencia cuadrática media;
c) el momento cuadrático medio.
Comprobación de la capacidad de sobrecarga mecánica del motor.
Después de seleccionar la potencia del motor de acuerdo con las condiciones de calentamiento, es necesario verificar la capacidad de sobrecarga mecánica del motor, es decir, asegurarse de que el par de carga máximo de acuerdo con el programa durante la operación y el par al inicio no exceda los valores momento maximo Según el catálogo. 
En los motores eléctricos asíncronos y síncronos, el valor de la sobrecarga mecánica permisible se debe a su momento electromagnético de inclinación, al alcanzar estos motores eléctricos que se detienen.
La multiplicidad de los momentos máximos en relación con el nominal debe ser 1.8 para motores eléctricos asíncronos trifásicos con anillos deslizantes no menores a 1.65 para los mismos motores eléctricos cortocircuitados. La multiplicidad del par máximo de un motor síncrono tampoco debe ser inferior a 1.65 a los voltajes nominales, frecuencia y corriente de excitación, con un factor de potencia de 0.9 (a la corriente principal).
Los motores eléctricos casi asíncronos y asíncronos tienen una capacidad de sobrecarga mecánica de hasta 2-2.5, y para algunos motores eléctricos especiales este valor aumenta a 3-3.5.
La sobrecarga permisible de los motores eléctricos de corriente continua está determinada por las condiciones de trabajo y, según GOST, es de 2 a 4, el límite inferior se aplica a los motores eléctricos con paralelo y el límite superior a los motores eléctricos con excitación en serie.
Si se nutre y red de distribución son sensibles a la carga, entonces la verificación de la capacidad de sobrecarga mecánica debe hacerse teniendo en cuenta las pérdidas de voltaje en las redes.
Para motores eléctricos asíncronos cortocircuitados y síncronos, la multiplicidad del momento inicial debe ser de al menos 0,9 (con respecto al nominal).
De hecho, la multiplicidad del momento inicial en motores eléctricos con jaula de ardilla doble y con un surco profundo es mucho mayor y alcanza 2-2.4.
Al elegir la potencia del motor eléctrico debe tenerse en cuenta que la frecuencia de las inclusiones influye en el calentamiento de los motores eléctricos. La frecuencia permisible de las inclusiones depende del deslizamiento normal, el momento de oscilación del rotor y la relación de la corriente de arranque.
Los motores asíncronos de los tipos normales no permiten cargas de 400 a 1000, y los motores eléctricos con deslizamiento incrementado, de 1100 a 2700 arranques por hora. Cuando se inicia bajo carga, el número permitido de inclusiones se reduce significativamente.
La corriente de arranque de un motor eléctrico con un rotor cortocircuitado es grande, y esta circunstancia en condiciones de arranques frecuentes, y especialmente con un mayor tiempo de aceleración, es importante.
A diferencia de los motores eléctricos con un rotor de fase, en el que parte del calor generado durante el arranque, se libera en un reóstato, es decir, fuera de la máquina, en motores eléctricos cortocircuitados, todo el calor se libera en la propia máquina, lo que provoca su mayor calentamiento. Por lo tanto, la elección de la potencia de estos motores eléctricos debe realizarse teniendo en cuenta el calentamiento durante numerosos arranques.
Motor electrico - Es un mecanismo que sirve para convertir energía eléctrica en mecánica. El principio de funcionamiento de cualquier motor eléctrico es la ley de la inducción electromagnética. Generalmente, un motor eléctrico consiste en una parte fija (estator) y un rotor (o anclaje) en el que se crean campos magnéticos fijos o giratorios. Los motores eléctricos son de varios tipos y modificaciones, se usan ampliamente en muchas ramas de la actividad humana y representan uno de los componentes principales en los mecanismos y unidades para diversos propósitos. De las características del motor eléctrico depende directamente de la eficiencia de producción.
Las partes principales de las cuales consiste Motores electricos Son el estator y el rotor. El rotor es la parte del motor que gira y el estator, que permanece estacionario. El principio de funcionamiento del motor eléctrico se concluye en la interacción de un campo magnético giratorio creado por el devanado del estator y la corriente eléctrica, que se encuentra en el devanado del rotor cerrado. Este proceso inicia la rotación del rotor en la dirección del campo.
Principales tipos de motores eléctricos:
Si hablamos de motores eléctricos como motores electricos asincronosentonces se refieren al tipo de motores de corriente alterna. Tales motores son como motores eléctricos monofásicos , y dos y tres fases. En los motores asíncronos, la frecuencia de la corriente alterna en el devanado no coincide con la frecuencia de rotación del rotor. El proceso del motor asíncrono es proporcionado por la diferencia de tiempo de los campos magnéticos del estator y el rotor. La rotación del rotor debido a esto se retrasa en relación con el campo del estator. Comprar motor electrico tipo asíncrono posible para máquinas que no requieren condiciones especiales de operación del mecanismo de disparo.
Tipos de motores eléctricos según el grado de protección frente al entorno externo:
Motores eléctricos a prueba de explosiones. tener un cuerpo fuerte, que, si se produce una explosión en el motor, evitará la derrota de todas las otras partes del mecanismo y evitará que ocurra un incendio.
Motores Protegidos Durante la operación, se cierran con válvulas y redes especiales que protegen el mecanismo de la entrada de objetos extraños. Se utiliza en un entorno donde no hay mucha humedad e impurezas de gases, polvo, humo y productos químicos.
Motores electricos cerrados. tener una cubierta especial que no penetre el polvo, los gases, la humedad y otras sustancias y elementos que pueden causar daños al mecanismo del motor. Tales motores eléctricos son herméticos y no presurizados.
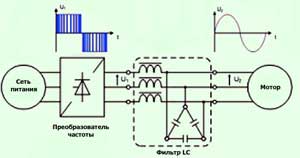
Alcance convertidores de frecuencia bastante extenso Están en demanda en máquinas-herramienta y accionamientos eléctricos de mecanismos industriales, transportadores, sistemas de ventilación por extracción, etc. El principio del chastotnik es la regla para calcular la velocidad angular de rotación del eje, que incluye factores tales como la frecuencia de la fuente de alimentación. Por lo tanto, al cambiar la frecuencia de la fuente de alimentación del devanado del motor, es posible regular la velocidad de rotación del rotor del motor en una relación directa, reduciendo así la velocidad del motor eléctrico o incrementándolas. Estos dispositivos también se denominan "inversores", gracias al método mediante el cual se resuelve la tarea de controlar simultáneamente la frecuencia y la tensión en la salida del convertidor. Todos los convertidores de frecuencia están necesariamente marcados con signos, que se indican sus características:
La mayoría de los convertidores de frecuencia industriales están diseñados para funcionar en redes trifásicas AC, sin embargo, hay otros modelos, como chastotniki para motores monofásicos.
La vida de una persona moderna es difícil de imaginar sin un mecanismo como un motor eléctrico. Eche un vistazo: han recibido una distribución casi universal. Hoy en día se utilizan no solo en todas las industrias, sino también en el transporte, objetos y dispositivos que rodean la vida cotidiana, en el trabajo y en el hogar. Secadores de pelo, ventiladores, máquinas de coser, herramientas de construcción: esta no es una lista completa de dispositivos que usan motores eléctricos.
Especialmente segura distinguido precisamente por motores, por lo que son ampliamente utilizados en las unidades de trabajo de los metales, maquinaria para la madera y otra maquinaria industrial, en prensas de forja, elevadores de, ascensores, tejer, coser, máquinas, ventiladores industriales, compresores, bombas, centrífugas, hormigoneras . Los motores eléctricos de grúa se utilizan en la construcción de capital, industrial y civil, en la minería, industrias metalúrgicas, energía, transporte.
Metro, tranvía, trolebús: todos estos tipos de transporte deben su existencia al motor eléctrico. Cualquier oficina o edificio residencial hoy en día no se puede imaginar sin un acondicionador de aire o un sistema de purificación de aire, también utilizan motores eléctricos. El funcionamiento de la mayoría de los equipos modernos es imposible sin un motor eléctrico, y por lo tanto depende mucho de la calidad y confiabilidad de este mecanismo. Su rotura puede llevar a resultados muy tristes, hasta un alto de producción y enormes pérdidas financieras. Por lo tanto, es posible adquirir motores eléctricos solo de un proveedor confiable y confiable que garantice la calidad del producto.
El principio del motor es el efecto del magnetismo, que le permite transformar efectivamente energía eléctrica en mecánica El principio de conversión de energía en diferentes tipos de motores eléctricos es el mismo para todos los tipos de motores eléctricos, pero el diseño de los motores y los métodos para controlar la velocidad de un momento de rotación pueden diferir. Todos son conocidos de la escuela. ejemplo mas simple Motor eléctrico: cuando el bastidor gira entre los polos de un imán permanente. Por supuesto, el dispositivo del motor eléctrico, que se utiliza en maquinaria industrial o electrodomésticos, es mucho más complicado. Veamos cómo funciona un motor eléctrico asíncrono que es el más utilizado en la industria.
El principio de funcionamiento del motor asíncrono.
Principio de funcionamiento motor de inducción, como los demás, se basa en el uso de un campo magnético giratorio. La velocidad de rotación del campo magnético se suele llamar síncrona, ya que corresponde a la velocidad de rotación del imán. La velocidad de rotación del cilindro se denomina asíncrona, es decir, que no coincide con la velocidad de rotación del imán. La velocidad de rotación del cilindro (rotor) difiere de la velocidad de rotación síncrona del campo magnético en una pequeña cantidad, llamada deslizamiento. Forzar a forzar corriente electrica crear un campo magnético giratorio y usarlo para rotar el rotor se utiliza generalmente corriente trifásica.
En los polos de un núcleo de hierro de forma anular, llamado el estator de un motor eléctrico, hay tres bobinas, redes corriente trifásica Relativos entre sí en un ángulo de 120 °. El interior del núcleo está fijo en el eje del cilindro metálico, llamado rotor del motor eléctrico. Si los devanados están interconectados y conectados a la red de corriente trifásica, el flujo magnético total creado por los tres polos girará. El flujo magnético total al mismo tiempo cambiará su dirección con un cambio en la dirección de la corriente en los devanados del estator (polos). En este caso, en un período de cambio en la corriente en los devanados, el flujo magnético hará una revolución completa. El flujo magnético giratorio arrastrará el cilindro, y recibiremos, por lo tanto, un motor eléctrico asíncrono.
Los devanados del estator se pueden conectar mediante una "estrella", pero también se forma un campo magnético giratorio cuando están conectados por un "triángulo". Si cambia los devanados de la segunda y tercera fase, el flujo magnético cambiará la dirección de su rotación hacia el opuesto. Se puede lograr el mismo resultado sin intercambiar los devanados del estator, pero dirigiendo la corriente de la segunda fase de la red a la tercera fase del estator, y la tercera fase de la red a la segunda fase del estator. Por lo tanto, es posible cambiar la dirección de rotación del campo magnético cambiando cualquiera de las dos fases.
El estator de un moderno motor eléctrico asíncrono tiene polos no expresados, es decir, la superficie interna del estator se hace completamente lisa. Para reducir las pérdidas por corrientes de Foucault, el núcleo del estator se ensambla a partir de láminas de acero prensadas. El núcleo del estator montado se fija en una caja de acero. En las ranuras del estator hay un devanado de alambre de cobre. Los devanados de fase del estator del motor eléctrico están conectados por una "estrella" o "triángulo", para lo cual se muestran todos los comienzos y finales de los devanados en la caja, en un protector aislante especial. Tal dispositivo del estator es muy conveniente, ya que le permite girar sus devanados a diferentes voltajes estándar.
El rotor de un motor asíncrono, como un estator, está compuesto de láminas de acero estampadas. Se coloca un devanado en las ranuras del rotor. Según el diseño del rotor, los motores eléctricos asíncronos se dividen en motores con rotor de jaula de ardilla y rotor de fase. El devanado de un rotor de jaula de ardilla está hecho de varillas de cobre insertadas en las ranuras del rotor. Los extremos de las varillas se conectan mediante un anillo de cobre. Este devanado se llama devanado de jaula de ardilla. Tenga en cuenta que las varillas de cobre en las ranuras no están aisladas.
Condiciones para seleccionar un motor eléctrico.
La elección de uno de los tipos de catálogo de motores eléctricos se considera correcta en las siguientes condiciones:
a) la conformidad más completa del motor eléctrico con la máquina de trabajo (accionamiento) en las propiedades mecánicas. Esto significa que el motor eléctrico debe tener una característica mecánica tal, en la cual podría informar al variador los valores necesarios de velocidad y aceleración, tanto durante el funcionamiento como durante el arranque;
b) El máximo aprovechamiento de la potencia del motor en el proceso. La temperatura de todas las partes activas del motor eléctrico en los modos de operación más severos debe ser lo más cercana posible a la temperatura de calentamiento determinada por las normas, pero no excederla;
c) la conformidad del motor eléctrico con el variador y las condiciones ambientales para el diseño;
d) Cumplimiento del motor con los parámetros de su red de suministro.
Los siguientes datos iniciales son necesarios para la elección del motor eléctrico:
a) el nombre y tipo de mecanismo;
b) la potencia máxima en el eje motriz del mecanismo, si el modo de operación es continuo y la carga es constante, y en otros casos - gráficos de cambios en la potencia o momento de resistencia en función del tiempo;
c) la velocidad de rotación del eje motriz del mecanismo;
d) método de articulación del mecanismo con el eje del motor (en presencia de engranajes, se indica el tipo de engranaje y la relación de engranaje);
e) la cantidad de torque en el arranque, que el motor eléctrico debe proporcionar en el eje motor del mecanismo;
e) los límites de la regulación de la velocidad del mecanismo accionado con la indicación de los valores superior e inferior de las velocidades y los valores correspondientes de potencia y par;
g) la naturaleza y la calidad (suavidad, altitud) del control de velocidad requerido;
h) la frecuencia de arranque o arranque de la unidad dentro de una hora; y) características ambientales.
La elección de un motor eléctrico basado en tener en cuenta todas las condiciones se realiza de acuerdo con los datos del catálogo.
Para los mecanismos de uso general, la elección de un motor eléctrico se simplifica en gran medida por los datos contenidos en la información relevante de los fabricantes, y se reduce a especificar el tipo de motor eléctrico con respecto a los parámetros de red y la naturaleza del entorno.
Selección de potencia del motor.
La elección de la potencia del motor debe realizarse de acuerdo con la naturaleza de las cargas de la máquina que trabaja. Este personaje es evaluado por dos motivos:
a) según el modo de funcionamiento nominal;
b) Cambios en la cantidad de energía consumida.
Existen los siguientes modos de operación:
a) largo (largo) cuando el período de trabajo es tan largo que calefacción eléctrica del motor alcanza su valor de estado estable (por ejemplo, en bombas, cintas transportadoras, ventiladores, etc.);
b) a corto plazo, cuando la duración del período de trabajo es insuficiente para alcanzar la temperatura de calentamiento del motor eléctrico correspondiente a esta carga, y los períodos de parada, por el contrario, son suficientes para enfriar el motor eléctrico a la temperatura ambiente. En este modo, los motores eléctricos pueden operar una variedad de mecanismos;
c) intermitente: con una duración relativa de activación de 15, 25, 40 y 60% con una duración de un ciclo de no más de 10 minutos (por ejemplo, en grúas, algunas máquinas, generadores de motores de soldadura de un solo operador, etc.).
De acuerdo con los cambios en el consumo de energía, los siguientes casos difieren:
a) carga constante, cuando la cantidad de energía consumida durante la operación es constante o tiene desviaciones menores del valor promedio, como, por ejemplo, para bombas centrífugas, ventiladores, compresores con flujo de aire constante, etc .;
b) carga variable, cuando la cantidad de energía consumida cambia periódicamente, como, por ejemplo, en excavadoras, grúas, algunas máquinas, etc .;
c) carga pulsante, cuando la cantidad de energía consumida cambia continuamente, como, por ejemplo, en bombas de pistón, trituradoras de mandíbulas, pantallas, etc.
La potencia del motor eléctrico debe cumplir tres condiciones:
a) calentamiento normal durante el funcionamiento;
b) suficiente capacidad de sobrecarga;
c) Par de arranque suficiente.
Todos los motores eléctricos se dividen en dos grupos principales:
a) para un modo de operación largo (sin limitar la duración de la inclusión);
b) para uso intermitente con tiempos de conmutación del 15, 25, 40 y 60%.
Para el primer grupo, en catálogos y pasaportes, la potencia continua que el motor eléctrico puede desarrollar indefinidamente está indicada, para el segundo grupo, la potencia que el motor eléctrico puede desarrollar, trabajando con interrupciones durante un tiempo indefinidamente largo con cierto tiempo de encendido.
La selección adecuada en todos los casos se considera un motor eléctrico de este tipo, que, al trabajar con la carga pero con el programa establecido por la máquina que trabaja, logra un calentamiento total permisible de todas sus partes. La elección de los motores eléctricos con el llamado "margen de potencia", basada en la mayor carga posible en el programa, lleva a una infrautilización del motor eléctrico y, en consecuencia, a un aumento de los costos de capital y operativos al reducir los factores de potencia y la eficiencia.
Un aumento excesivo en la potencia del motor también puede provocar sacudidas durante la aceleración.
Si el motor debe funcionar durante un tiempo prolongado con una carga constante o ligeramente variable, entonces determinar su potencia no es difícil y se realiza de acuerdo con las fórmulas, por lo general con coeficientes empíricos.
Es mucho más difícil elegir la potencia de los motores eléctricos de otros modos de operación.
La carga a corto plazo se caracteriza por el hecho de que los períodos de inclusión son cortos y las pausas son suficientes para completar el enfriamiento del motor eléctrico. En este caso, se supone que la carga del motor eléctrico durante los períodos de encendido se mantiene constante o casi constante.
Para que el motor eléctrico se utilice correctamente para calefacción en este modo, es necesario elegirlo de modo que su potencia continua (indicada en los catálogos) sea menor que la potencia correspondiente a la carga a corto plazo, es decir, que el motor eléctrico tenga una sobrecarga térmica durante los períodos de su trabajo a corto plazo.
Si los períodos de funcionamiento del motor eléctrico son significativamente menores que el tiempo requerido para su calentamiento completo, pero la pausa entre los períodos de encendido es significativamente más corta que el tiempo de enfriamiento completo, entonces se produce una carga a corto plazo.
Prácticamente uno debería distinguir entre dos tipos de trabajo:
a) la carga durante el período de trabajo es constante en magnitud y, en consecuencia, su gráfica se representa como rectángulos alternando con pausas;
b) la carga durante el período de trabajo varía según una ley más o menos complicada.
En ambos casos, el problema de elegir un motor eléctrico por potencia se puede resolver analítica y gráficamente. Ambos métodos son bastante complicados, por lo tanto, se recomienda prácticamente un método simplificado de grandeza equivalente, incluyendo tres formas:
a) corriente cuadrática media;
b) potencia cuadrática media;
c) el momento cuadrático medio.
Comprobación de la capacidad de sobrecarga mecánica del motor.
Después de seleccionar la potencia del motor de acuerdo con las condiciones de calentamiento, es necesario verificar la capacidad de sobrecarga mecánica del motor, es decir, asegurarse de que el momento de carga máxima de acuerdo con el programa durante la operación y el momento de arranque no exceda el valor del momento máximo por catálogo.
En los motores eléctricos asíncronos y síncronos, el valor de la sobrecarga mecánica permisible se debe a su momento electromagnético de inclinación, al alcanzar estos motores eléctricos que se detienen.
La multiplicidad de los momentos máximos en relación con el nominal debe ser 1.8 para motores eléctricos asíncronos trifásicos con anillos deslizantes no menores a 1.65 para los mismos motores eléctricos cortocircuitados. La multiplicidad del par máximo de un motor síncrono tampoco debe ser inferior a 1.65 a los voltajes nominales, frecuencia y corriente de excitación, con un factor de potencia de 0.9 (a la corriente principal).
Los motores eléctricos casi asíncronos y asíncronos tienen una capacidad de sobrecarga mecánica de hasta 2-2.5, y para algunos motores eléctricos especiales este valor aumenta a 3-3.5.
La sobrecarga permisible de los motores eléctricos de corriente continua está determinada por las condiciones de trabajo y, según GOST, es de 2 a 4, el límite inferior se aplica a los motores eléctricos con paralelo y el límite superior a los motores eléctricos con excitación en serie.
Si las redes de suministro y distribución son sensibles a la carga, entonces la capacidad de sobrecarga mecánica debe verificarse teniendo en cuenta las pérdidas de voltaje en las redes.
Para motores eléctricos asíncronos cortocircuitados y síncronos, la multiplicidad del momento inicial debe ser de al menos 0,9 (con respecto al nominal).
De hecho, la multiplicidad del momento inicial en motores eléctricos con jaula de ardilla doble y con un surco profundo es mucho mayor y alcanza 2-2.4.
Al elegir la potencia del motor eléctrico debe tenerse en cuenta que la frecuencia de las inclusiones influye en el calentamiento de los motores eléctricos. La frecuencia permisible de las inclusiones depende del deslizamiento normal, el momento de oscilación del rotor y la relación de la corriente de arranque.
Los motores asíncronos de los tipos normales no permiten cargas de 400 a 1000, y los motores eléctricos con deslizamiento incrementado, de 1100 a 2700 arranques por hora. Cuando se inicia bajo carga, el número permitido de inclusiones se reduce significativamente.
La corriente de arranque de un motor eléctrico con un rotor cortocircuitado es grande, y esta circunstancia en condiciones de arranques frecuentes, y especialmente con un mayor tiempo de aceleración, es importante.
A diferencia de los motores eléctricos con un rotor de fase, en el que parte del calor generado durante el arranque, se libera en un reóstato, es decir, fuera de la máquina, en motores eléctricos cortocircuitados, todo el calor se libera en la propia máquina, lo que provoca su mayor calentamiento. Por lo tanto, la elección de la potencia de estos motores eléctricos debe realizarse teniendo en cuenta el calentamiento durante numerosos arranques.