En el pasaporte del motor eléctrico, se indica la corriente en la carga nominal en el eje. Si, por ejemplo, se indica 13.8 / 8 A, esto significa que cuando el motor se enciende en una red de 220 V y con una carga nominal, la corriente consumida desde la red será de 13.8 A. Cuando encienda la red de 380 V desde la red, Se consume una corriente de 8 A, es decir, la igualdad de poderes es verdadera: √ 3 x 380 x 8 = √ 3 x 220 x 13.8.
Estas aplicaciones a menudo requieren motores especiales y mecanismos de conmutación correspondientes. Si la curva de torque de la carga τ de la carga es compleja, y el torque del motor τ del motor no es constante, se recomienda dividir el cálculo en zonas separadas, como se muestra en la Figura 5.
Ahora, el tiempo de aceleración para zonas individuales y los tiempos de aceleración promedio que tienen efecto en el segmento se calculan y se agregan para cada segmento de velocidad individual. Ahora, para calcular el tiempo de inicio del momento de aceleración no constante, viene dado por la ecuación.
Al conocer la potencia nominal del motor (desde el pasaporte), puede determinar su corriente nominal. Cuando enciende el motor en una red trifásica de 380 V, la corriente nominal se puede calcular utilizando la siguiente fórmula:
I n = P n / (√3U n x η x cosf),
La figura 1. Pasaporte de un motor eléctrico. La potencia nominal es de 1,5 kV, la corriente nominal a una tensión de 380 V - 3,4 A.
Tiempo de aceleración para pares inestables. En los casos en que el valor de cada uno de ellos es el mismo que en la ecuación 2, excepto. Esto muestra la suma de todas las zonas con multiplicación del momento de inercia y cambio de velocidad. Este tiempo es casi igual al tiempo calculado por la ecuación. La Figura 6 muestra la curva de velocidad y tiempo, obtenida al modelar, el gráfico muestra que la velocidad aumenta con el tiempo y se aproxima al valor nominal después de unos 7 segundos, lo que corresponde al resultado calculado por una ecuación matemática.
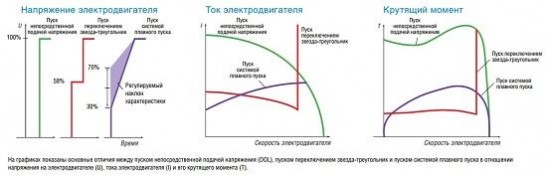
Este artículo describe la importancia del tiempo de arranque de un motor asíncrono junto con varios tipos de métodos de arranque. Los resultados de ambos enfoques coincidieron. Un motor eléctrico con una potencia apagada resiste poco a la electricidad, ya que los devanados del motor actúan casi tan cortos hasta que se activan. Cuando se enciende la alimentación, la corriente puede ser muchas veces mayor que la corriente cuando el motor está funcionando a la velocidad nominal bajo carga. Esta corriente de corriente dura solo una fracción de segundo.
Si no se conoce la eficiencia. y el factor de potencia del motor, por ejemplo, en ausencia de una placa de pasaporte en el motor, su corriente nominal se puede determinar con un pequeño error por la relación "dos amperios por kilovatio", es decir. Si la potencia nominal del motor es de 10 kW, entonces la corriente consumida será aproximadamente igual a 20 A.
Para el motor indicado en la figura, esta relación también se mantiene (3.4 A ≈ 2 x 1.5). Se obtienen valores más precisos de las corrientes cuando se usa esta relación cuando la potencia del motor es de 3 kW.
El cálculo de la corriente de arranque exacta no es posible, pero el rango puede determinarse si la documentación del fabricante no lo indica. Lea la placa de identificación del motor en el motor y encuentre el voltaje indicado en él. El Código Eléctrico Nacional establece que todos los motores tienen una placa de identificación que proporciona información específica sobre el rendimiento eléctrico del motor.
Busque el código de letra del rotor bloqueado o el “Código de rotor bloqueado” en la placa de identificación del motor. Estas letras se omiten para evitar confusiones. Siga la línea de código de la letra a la derecha y encuentre el rango especificado. El rango se especifica en miles de voltios-amperios o kilovatios.
Cuando el motor está inactivo, se consume una pequeña cantidad de corriente de la red (corriente sin carga). A medida que aumenta la carga, aumenta el consumo de corriente. Con el aumento de la corriente aumenta el calentamiento de los devanados. Una sobrecarga alta conduce al hecho de que el aumento de la corriente provoca el sobrecalentamiento de los devanados del motor, y existe el peligro de quemar el aislamiento (combustión del motor eléctrico).
Multiplique cada número en el rango por 1, divida cada resultado por el voltaje del motor que se encuentra en la placa de identificación. El rango resultante es el rango de corriente de arranque. La separación de la tensión del motor por 230 voltios da un rango de corriente de arranque de 8 a 1 amperio.
La corriente de arranque es solo transitoria, y si el interruptor tiene el valor correcto, no se desconectará una fracción de segundo en los picos de corriente. Cuando se activan los devanados del motor, crean resistencia al flujo de corriente y la corriente comienza a caer. Cuando el motor alcance la velocidad máxima, el nivel de corriente estará en el nivel indicado en la placa de identificación del motor como la corriente de carga completa.
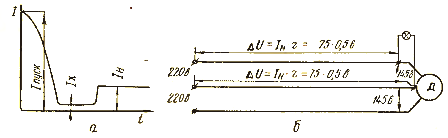
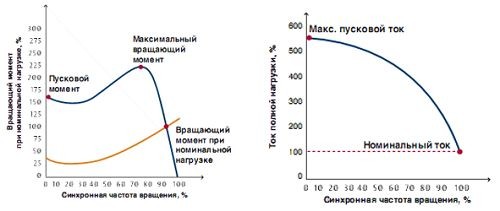
En el momento de la puesta en marcha desde la red, un motor eléctrico consume la llamada corriente de arranque, que puede ser de 3 a 8 veces más que la corriente nominal. La naturaleza del cambio actual se muestra en el gráfico (Fig. 2, a).
La figura 2. La naturaleza de los cambios en la corriente consumida por el motor desde la red (a) y el efecto de la corriente alta en las fluctuaciones de voltaje en la red (b)
El voltaje es importante para determinar la corriente de arranque. Si la placa de identificación del motor indica varios voltajes, es necesario determinar el voltaje utilizado. Un lugar fácil para medirlo cuando el motor está apagado. El tipo de voltaje determina el método de medición. Mida la corriente trifásica entre los dos contactos calientes y duplíquelo. La corriente de fase separada se mide entre dos terminales calientes. La corriente monofásica se mide desde el terminal caliente a tierra.
Los motores eléctricos tienen una tensión y frecuencia nominales y una corriente nominal de carga plena, que se pueden encontrar en la placa de identificación del motor. Los motores deben funcionar a la tensión y frecuencia nominales, y luego la sobrecarga del motor puede calcularse comparando la corriente real del motor con la corriente nominal de plena carga. Los motores se calientan cuando están sobrecargados, lo que reduce la duración de su aislamiento. Sin embargo, si la placa de identificación del motor proporciona un factor de servicio, el motor puede sobrecargarse con esta cantidad sin ningún daño.
El valor exacto de la corriente de arranque para cada motor específico se puede determinar al conocer el valor tarifas actuales de inicio - Comienzo / me nom. La multiplicidad de la corriente de arranque es una de las características técnicas del motor, que se puede encontrar en los catálogos. La corriente de arranque está determinada por la siguiente fórmula: I start = I n x (I start / I nom). Por ejemplo, con una corriente nominal del motor de 20 A y una relación de corriente de arranque de 6, la corriente de arranque es de 20 x 6 = 120 A.
Obtenga la tensión nominal y la frecuencia de la placa de identificación del motor. Asegúrese de que la fuente de alimentación al motor coincida con la tensión nominal. Si estos números no coinciden, entonces la medición de la corriente del motor puede no dar una indicación real de calentamiento y sobrecarga del motor.
Divida entre la corriente nominal de plena carga de la placa de identificación del motor. Este será el factor de carga para el motor. Esto significa que el motor está sobrecargado en un 10%. Si el factor de carga es 0 o menos, el motor no está sobrecargado. Revise la placa de identificación del motor para el factor de servicio. Muchos motores están clasificados para un factor de servicio de 15, lo que significa que el motor puede sobrecargarse en un 15% sin daños. Si el motor en el ejemplo del paso 2 tuviera un factor de servicio de 15, su sobrecarga sería aceptable y el motor podría funcionar sin daños.
El conocimiento de la cantidad real de corriente de arranque es necesario para seleccionar fusibles, para verificar el funcionamiento de las liberaciones electromagnéticas durante el arranque del motor cuando se seleccionan disyuntores y para determinar la cantidad de caída de voltaje en la red al inicio.
Una gran corriente de arranque, para la cual la red generalmente no está diseñada, causa reducciones significativas en la tensión de la red (Fig. 2, b).
Verifique la placa de identificación del motor para la temperatura ambiente y la clase de aislamiento Los motores eléctricos generalmente están diseñados para funcionar a una temperatura ambiente de 40 grados. Si el motor siempre funciona a una temperatura ambiente muy por debajo de la temperatura ambiente nominal, es posible que se sobrecargue el motor sin daños. Póngase en contacto con el fabricante para obtener información sobre la nueva placa de identificación, basada en una temperatura ambiente nominal más baja.
Si el motor funciona con una temperatura de aislamiento muy por debajo de la temperatura máxima, es posible que se sobrecargue el motor sin daños. Si se produce una protección de sobrecorriente inesperada en el arranque, esto significa que la corriente de arranque excede los límites normales. Como resultado, se pueden alcanzar algunas unidades de disparo máximo, se puede reducir la vida útil e incluso se pueden destruir algunos dispositivos. Para evitar esta situación, es necesario considerar la redundancia del equipo de distribución. De acuerdo con el riesgo, las tablas muestran la combinación de un disyuntor, un contactor y un relé térmico para obtener la coordinación tipo 1 o tipo 2. En ocasiones, este valor puede ser hasta 25 veces. . Aunque los motores de alta eficiencia se pueden encontrar en el mercado, en la práctica, sus corrientes de irrupción son casi iguales a algunos de los motores estándar.
Si tomamos la resistencia de los cables que van de la fuente al motor igual a 0.5 Ohm, la corriente nominal I n = 15 A, y la corriente de arranque es cinco veces la corriente nominal, entonces la pérdida de voltaje en los cables en el momento del inicio será 0.5 x 75 + 0, 5 x 75 = 75 V.
En las terminales del motor, así como en las terminales de una serie de motores eléctricos en funcionamiento, habrá 220 - 75 = 145 V. Una disminución en el voltaje puede provocar el frenado de los motores en funcionamiento, lo que conllevará un aumento aún mayor de la corriente de la red y los fusibles quemados.
El uso de un arrancador delta delta, un arrancador suave estático o una unidad de velocidad variable reduce la corriente de arranque. También "Motores asíncronos" para más información. Por razones técnicas y financieras, generalmente es ventajoso reducir la corriente suministrada a los motores asíncronos. Esto se puede lograr usando condensadores sin afectar la potencia de los motores.
La aplicación de este principio a la operación de motores asíncronos se conoce comúnmente como "mejora del factor de potencia" o "corrección del factor de potencia". Como se describe en el capítulo "Corrección del factor de potencia", la potencia aparente suministrada a un motor de inducción se puede reducir significativamente mediante el uso de condensadores conectados a la derivación.
En las lámparas eléctricas en el momento de la puesta en marcha del motor, el calor se reduce (las lámparas “parpadean”). Por lo tanto, al arrancar los motores eléctricos se esfuerzan por reducir las corrientes de arranque.
Para reducir la corriente de arranque, se puede usar un circuito de arranque del motor con un devanado de estator que cambia de estrella a triángulo.En este caso, la tensión de fase disminuirá en √ W veces y, en consecuencia, la corriente de arranque es limitada. Una vez que el rotor alcanza una cierta velocidad, los devanados del estator se cambian al circuito delta y su voltaje se vuelve igual al voltaje nominal. La conmutación se realiza generalmente de forma automática utilizando un relé de tiempo o actual.
La compensación de potencia reactiva se recomienda especialmente para motores que funcionan durante mucho tiempo con una potencia reducida. Se determina la corriente suministrada al motor después de la corrección del factor de potencia. La información adicional en esta versión cubre otras áreas importantes que pueden afectar la elección del mejor tipo de motor para un trabajo en particular.
Las carcasas, los fusibles, la protección de sobrecarga térmica y los arrancadores de motor se tratarán en una versión posterior. La información en esta versión se aplica solo a este tipo y no se puede aplicar a otros tipos. Unidad de electrodo asíncrono trifásico con un rotor de jaula de ardilla Este motor tiene un rotor que consiste en placas de hierro pero no enrolladas en un rotor; por lo tanto, no tiene cepillos, interruptores, o anillos resbaladizos. Todos los devanados están ubicados en el estator, que también está hecho de laminados de hierro con diferentes números de polos norte y sur.
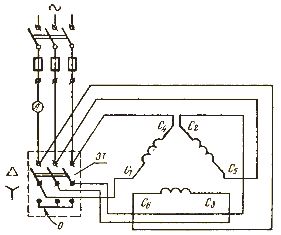
La figura 3. Esquema de arranque del motor eléctrico con cambio de bobinas del estator de una estrella a un triángulo
La conversión de energía eléctrica en energía cinética se lleva a cabo utilizando varios tipos de motores eléctricos. Estos dispositivos son ampliamente utilizados en la fabricación moderna y en la vida cotidiana. La mayoría de las veces, los motores eléctricos realizan la función de accionamientos eléctricos de máquinas y mecanismos, se utilizan para garantizar el funcionamiento de los equipos de bombeo, los sistemas de ventilación y muchas otras unidades y dispositivos. En relación con una aplicación tan amplia, el cálculo de la potencia del motor eléctrico es de particular importancia. Para estos fines, se han desarrollado muchos métodos diferentes que permiten realizar cálculos en relación con condiciones operativas específicas.
El motor funciona a una velocidad constante, determinada por la frecuencia de la línea y el número de pares de polos magnéticos que tiene. Con la excepción de un pequeño número de velocidades de deslizamiento a plena carga, no funcionará a velocidades más bajas sin un sobrecalentamiento grave.
Características de corriente y tensión. Corriente del motor. El par es creado por el hilo actual; cuanto mayor sea la corriente, mayor será la salida de par. La corriente también es responsable del aumento de temperatura en los devanados. Cualquier condición de operación, como baja tensión, frecuencia incorrecta o sobrecarga del par, que lleve a un exceso del valor nominal nominal, provocará un aumento anormal de la temperatura.
Hay muchos tipos y modificaciones de motores eléctricos. Cada uno de ellos tiene su propio poder y otros parámetros.
La clasificación principal divide estos dispositivos en motores eléctricos de corriente continua y alterna. La primera opción se usa con mucha menos frecuencia, ya que su funcionamiento requiere la presencia de una fuente de corriente constante o un dispositivo que convierta una tensión alterna en una corriente continua. La implementación de esta condición en la producción moderna requerirá costos adicionales significativos.
Normalmente, los motores pueden contener hasta el 90% de la tensión nominal y, a pesar de un aumento anormal de la temperatura, no será lo suficientemente grande como para dañar el aislamiento. Sin embargo, su corriente de arranque y la corriente de ruptura serán más altas de lo normal. Al mismo tiempo, es necesario ajustar correctamente el cableado, el fusible y la protección de sobrecarga térmica. Además, el ruido del motor aumentará significativamente y puede ser indeseable.
Si la tensión a plena carga no está equilibrada entre las fases, o el motor está defectuoso o la línea de alimentación está desequilibrada. Para determinar dónde está el error, primero mida el voltaje de todas las fases. Luego mueva todas las líneas eléctricas a una fase y repita las mediciones. Si un voltaje más alto se acelera al reconectarse, la línea eléctrica no está balanceada. Las medidas correctivas se pueden tomar de la siguiente manera.
Pero, a pesar de las deficiencias significativas, los motores de CC tienen un alto par de arranque y funcionan de manera estable incluso con grandes sobrecargas. Debido a sus cualidades, estas unidades son ampliamente utilizadas en el transporte eléctrico, en la industria metalúrgica y de máquinas-herramienta.
Sin embargo, la mayoría de los equipos modernos funcionan con motores de corriente alterna. La base de la acción de estos dispositivos se encuentra, lo que crea un entorno conductivo. El campo magnético se crea utilizando devanados, racionalizados por corrientes o utilizando imanes permanentes. Los motores de CA pueden ser.
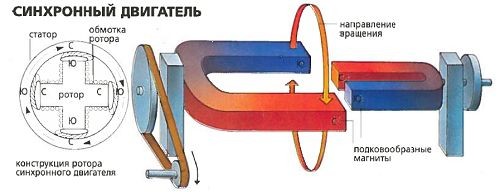
El uso de motores eléctricos síncronos se practica en equipos en los que se requiere una velocidad de rotación constante. Estos son generadores de corriente continua, bombas, compresores y otras instalaciones similares. Diferentes modelos tienen sus propias características técnicas. Por ejemplo, el valor de la velocidad de rotación puede estar en el rango de 125-1000 revoluciones por minuto, y la potencia alcanza los 10 mil kilovatios.
En muchos diseños hay un devanado cortocircuitado ubicado en el rotor. Con su ayuda, si es necesario, se realiza un arranque asíncrono, después del cual el motor síncrono continúa funcionando como siempre, minimizando la pérdida de energía eléctrica lo más posible. Estos motores se caracterizan por su pequeño tamaño y alta eficiencia.

Los motores de inducción de CA se han extendido mucho más en el campo industrial. Tienen una frecuencia de rotación del campo magnético muy alta, mucho mayor que la velocidad de rotación del rotor. Una desventaja significativa de estos dispositivos se considera una disminución en la eficiencia hasta un 30-50% de la norma con cargas bajas. Además, durante la puesta en marcha, los parámetros de la corriente se vuelven varias veces mayores en comparación con los indicadores de rendimiento. Estos problemas se eliminan mediante el uso de convertidores de frecuencia y arrancadores suaves.
Los motores asíncronos se utilizan en aquellas instalaciones que requieren un encendido y apagado frecuente de los equipos, por ejemplo, en ascensores, cabrestantes y otros dispositivos.
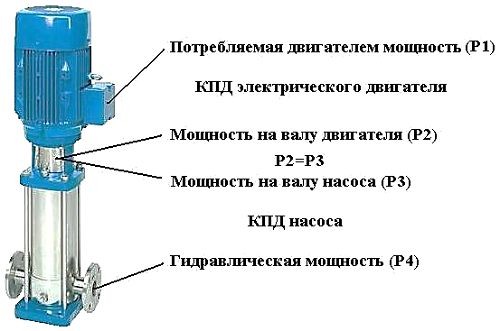
La elección del motor eléctrico para la instalación de una bomba depende de las condiciones específicas, en primer lugar, del esquema de suministro de agua. En la mayoría de los casos, el suministro de agua se realiza mediante un tanque de agua o caldera de agua. Para impulsar todo el sistema, se utilizan bombas centrífugas con motores asíncronos.
La elección de la potencia de bombeo óptima se lleva a cabo dependiendo de la necesidad del suministro y la presión del líquido. El caudal de la bomba Q H se mide en litros suministrados en 1 hora y se denomina l / h. Este parámetro está determinado por la siguiente fórmula: Qн = Qmaxч = (kch х kсут х Qср.сут) / (24 η), donde Qmaxч es el posible flujo de agua máximo por hora, l / h, kch es el coeficiente de irregularidad del caudal por hora, kday es el coeficiente de irregularidad Caudal diario (1.1 - 1.3), η es la eficiencia de la unidad de bombeo, teniendo en cuenta las pérdidas de agua), Qav.day: el valor del consumo promedio diario de agua (l / día).
La presión de agua óptima debe garantizar que se suministra a un lugar fijo bajo la condición de la presión necesaria. Los parámetros requeridos de la cabeza de la bomba (HHP) dependen de la altura de succión (HVS) y la altura de descarga (NNG), que en conjunto determinan la cabeza estática (Hc), la pérdida en las tuberías (Hp) y la diferencia de presión entre la superior (Ditch) y la inferior (Rnu) niveles
Basado en el hecho de que el valor de presión será igual a H = P / ρg, donde P es presión (Pa), ρ es densidad del fluido (kg / m 3), g = 9.8 m / s2 es la aceleración de la gravedad, g es específico peso del fluido (kg / m 3), se obtiene la siguiente fórmula: HNTP = Hc + Hn + (1 / ρ) x (Ditch - Rnu).
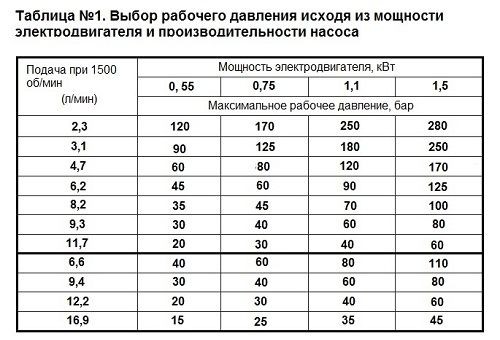
Después de calcular el caudal de agua y la carga en el catálogo, ya es posible seleccionar una bomba con los parámetros más adecuados. Para no confundirse con la potencia del motor eléctrico, se debe determinar mediante la fórmula: PDA = (kz x ρ x Qn x Hn) / (ηn x ηп), donde kz es el factor de seguridad que depende de la potencia del motor eléctrico de la bomba y es 1.05 - 1.7. Este indicador toma en cuenta las posibles fugas de agua de la tubería debido a conexiones flojas, roturas de la tubería y otros factores, por lo que los motores eléctricos de las bombas deberían tener cierta reserva de energía. Cuanto mayor sea la potencia, menor será el factor de seguridad.
Por ejemplo, con una potencia de motor de bomba de 2 kW - kz = 1.5, 3.0 kW - kz = 1.33, 5 kW - kz = 1.2, con una potencia superior a 10 kW - kz = 1.05 - 1.1 . Otros parámetros significan: ηп - eficiencia de transferencia (transferencia directa - 1.0, correa en V - 0.98, engranaje - 0.97, tiempo plano - 0.95), ηn - eficiencia de las bombas de pistón 0.7 - 0.9, centrífuga 0 , 4 - 0.8, vórtice 0.25 - 0.5.
Al elegir el motor eléctrico más adecuado para el funcionamiento de un compresor, es necesario tener en cuenta el modo de funcionamiento continuo de este mecanismo y la carga constante. El cálculo de la potencia requerida del motor P DV se realiza de acuerdo con la potencia en el eje del mecanismo principal. En este caso, las pérdidas que se producen en el enlace intermedio de la transmisión mecánica deben tenerse en cuenta.

Los factores adicionales son la capacidad, el propósito y la naturaleza de la producción, que operará el equipo del compresor. Tienen cierto impacto y, por lo tanto, el equipo puede requerir ajustes menores pero constantes para mantener el rendimiento en el nivel adecuado.
Determine la potencia del motor por la fórmula: 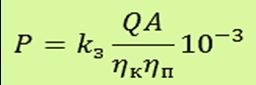 en el cual
en el cual
El trabajo A se calcula mediante una fórmula separada: A = (Au + Aa) / 2, donde Au y Aa representan compresión isotérmica y adiabática, respectivamente.
El valor del trabajo que debe realizarse antes de que aparezca la presión requerida se puede determinar utilizando la tabla:
|
P 2, 10 5 Pa |
||||||||
|
A, 10 -3 J / m 3 |
El funcionamiento típico del compresor se caracteriza por un funcionamiento continuo. Los accionamientos eléctricos reversibles, por regla general, están ausentes, los encendidos y apagados son extremadamente raros. Por lo tanto, la mejor opción para garantizar el funcionamiento normal de los compresores será un motor eléctrico síncrono.
Los ventiladores son ampliamente utilizados en muchas áreas diferentes. Los dispositivos de uso general funcionan en aire limpio, a una temperatura inferior a 80 ° C. El aire con una temperatura más alta se mueve con la ayuda de ventiladores especiales resistentes al calor. Si tiene que trabajar en un entorno agresivo o explosivo, en estos casos se utilizan modelos de dispositivos anticorrosión y antideflagrantes.

De acuerdo con el principio de funcionamiento, las instalaciones de ventiladores pueden ser centrífugas o radiales y axiales. Dependiendo del diseño, desarrollan presiones desde 1000 hasta 15000 Pa. Por lo tanto, la potencia requerida para impulsar el ventilador se calcula de acuerdo con la presión que se debe generar.
Para este propósito, se utiliza la fórmula: Nb = Hb · Qb / 1000 · eficiencia, en la que Nb es la potencia requerida para la unidad (kW), Hb es la presión creada por el ventilador (Pa), Qb es el volumen de aire desplazado (m 3 / s) , eficiencia - coeficiente de rendimiento.
Para calcular la potencia del motor eléctrico, se utiliza la fórmula.: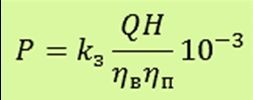 donde los valores de los parámetros son los siguientes:
donde los valores de los parámetros son los siguientes:
Esta fórmula le permite calcular la potencia de los motores eléctricos para ventiladores centrífugos y axiales. Para estructuras centrífugas, la eficiencia es 0.4-0.7, y para estructuras axiales - 0.5-0.85. Otras características de diseño están disponibles en catálogos especiales para todo tipo de motores eléctricos.
La reserva de energía no debe ser demasiado grande. Si es demasiado alto, la eficiencia de la unidad disminuirá notablemente. Además, en los motores de CA, el factor de potencia puede disminuir.
Al momento de arrancar el motor, su eje permanece estacionario. Para que comience a relajarse, es necesario hacer un esfuerzo, mucho más nominal. En este sentido, la corriente de arranque también supera la nominal. En el proceso de desenrollado del eje, se produce una disminución gradual gradual de la corriente.
La influencia de las corrientes de entrada afecta negativamente el funcionamiento del equipo, principalmente debido a las repentinas caídas de voltaje. Con el fin de reducir su impacto negativo, se utilizan varios métodos. En el proceso de aceleración, los circuitos del motor pasan de una estrella a un triángulo, se utilizan convertidores de frecuencia y arrancadores electrónicos suaves.
Inicialmente, se calcula el valor de la corriente nominal del motor, de acuerdo con su tipo y potencia nominal. Para los dispositivos de CC, la fórmula se verá así:
En los motores de CA, la corriente nominal se determina mediante una fórmula diferente:
Todos los parámetros tienen designaciones correspondientes:
Después de calcular la corriente nominal, es posible calcular el valor de la corriente de inicio por la fórmula:  en el cual
en el cual
La corriente de arranque se calcula para cada motor presente en el circuito eléctrico. De acuerdo con su tamaño, se selecciona un disyuntor para proteger todo el circuito.
La carga en el motor está determinada por su modo de operación. Puede permanecer sin cambios o cambiar según las condiciones de operación. Al elegir un motor, se debe tener en cuenta la naturaleza y el valor de la carga prevista. Teniendo en cuenta este factor, se calcula la potencia del motor eléctrico.
Modos en los que operan los motores eléctricos: