Szinte minden gép rendelkezik aszinkron motorral, elektromos hajtásként. Egyszerű kialakításúak és nem magasak. E tekintetben fontos az aszinkron motor sebességének szabályozása. A standard kapcsolási áramkörben azonban fordulatszámát csak mechanikus sebességváltó rendszerek (hajtóművek, csigák) segítségével lehet szabályozni, ami nem mindig kényelmes. A rotor sebességének elektromos vezérlése több előnnyel jár, bár bonyolítja az indukciós motor bekötési rajzát.
Az automata berendezések egyes összetevői számára alkalmas az aszinkron elektromos motor tengelyének forgási sebességének elektromos szabályozása. Ez az egyetlen módja az üzemmódok zökkenőmentes és pontos beállításának. A frekvencia, a feszültség és az alakzat alakításával többféle módon lehet szabályozni a forgási sebességet. Mindezeket a diagram mutatja.
Az ábrán bemutatott módszerek közül a rotor sebességének leggyakoribb szabályozása a következő paraméterek változása:
Az utolsó két módszer lehetővé teszi a forgási sebesség megváltoztatását anélkül, hogy jelentősen csökkentené a hatékonyságot és a teljesítményveszteséget, a többi kiigazítási módszer hozzájárul a hatékonyság csökkenéséhez, ami arányos a csúszás mennyiségével. Azonban ezeknek és másoknak vannak előnyei és hátrányai. Mivel a termelésben gyakran használnak aszinkron motorokat a mókus ketrec forgórészével, minden további megbeszélés az ilyen típusú motorokra vonatkozik.
mert frekvenciaszabályozás főleg használt félvezető konverterek. Működésük elve az aszinkron motor sajátosságain alapul, ahol az állórész mágneses térének forgási frekvenciája a tápfeszültség frekvenciájától függ. Az állórész mező forgási sebességét a következő képlet határozza meg:
n1 = 60f / p, ahol n1 a mező forgási frekvenciája (rpm), az ellátási hálózat f-frekvenciája (Hz), p az állórész-pólusok száma, 60 a dimenzió újraszámításának együtthatója.
Az aszinkron motor veszteség nélküli hatékony működéséhez szükség van a mellékelt feszültség módosítására a frekvenciával együtt. A feszültségnek a terhelés pillanatától függően kell változnia. Ha a terhelés állandó, akkor a feszültség a frekvenciával arányosan változik.
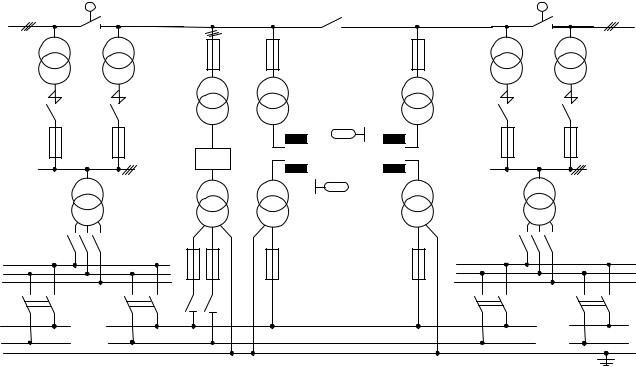
A modern frekvenciaszabályozók lehetővé teszik, hogy széles körben csökkentsék és növeljék a sebességet. Ez biztosította azok széles körű használatát a szabályozott húzóberendezésekben, például hegesztett hálós többkapcsolatos gépekben. Ezekben az aszinkron motor forgási sebességét, amely a tekercs tengelyt hajtja, egy félvezető átalakító szabályozza. Ez a beállítás lehetővé teszi a kezelő számára, hogy nyomon kövesse a technológiai műveletek helyességét, felgyorsítsa vagy lelassítsa a lépéseket, amikor a gép hangol.
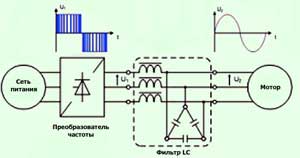
A frekvenciaváltó működésének alapelveit részletesebben meg kell tartanunk. A kettős konverzió elvén alapul. A szabályozó egy egyenirányítóból, egy impulzus inverterből és egy vezérlőrendszerből áll. Az egyenirányítóban a szinuszos feszültséget állandó feszültséggé alakítjuk, és az inverterbe tápláljuk. A háromfázisú impulzus inverter hat tranzisztoros kapcsolóval rendelkezik. Ezekkel az automatikus gombokkal állandó feszültséget alkalmazunk az állórész tekercsére úgy, hogy a megfelelő pillanatban a közvetlen tekercselés és a fordított áram 120 ° fázisváltással érkezzen a megfelelő tekercsekre. Ily módon az állandó feszültség váltakozik a kívánt amplitúdójú és frekvenciájú váltakozó háromfázisú feszültségre.
A szükséges paramétereket a vezérlőmodulon keresztül állítjuk be. A gombok működésének automatikus beállítása az impulzusszélesség-moduláció elvének megfelelően történik. A tápkapcsolók erős IGBT tranzisztorokat használnak. A tirisztorokkal összehasonlítva magas kapcsolási frekvenciával rendelkeznek és szinte sinusoid áramot termelnek minimális torzítással. Az ilyen eszközök gyakorlati alkalmazása ellenére a közepes és nagy teljesítményű motorok költségei továbbra is nagyon magasak.
 Az aszinkron motor módszer forgási sebességének beállítása változások a pólusok számában vonatkozik a mókus-ketreces elektromos motorok leggyakoribb szabályozási módszereire is. Az ilyen motorokat többsebességnek nevezik. A módszer megvalósításának két módja van:
Az aszinkron motor módszer forgási sebességének beállítása változások a pólusok számában vonatkozik a mókus-ketreces elektromos motorok leggyakoribb szabályozási módszereire is. Az ilyen motorokat többsebességnek nevezik. A módszer megvalósításának két módja van:
Az első esetben további tekercsek felhelyezése a hornyokba, a huzal keresztmetszetének csökkentése, és ez az elektromos motor névleges teljesítményének csökkenéséhez vezet. A második esetben a kapcsolóberendezések bonyolultak, különösen három vagy több sebesség esetén, valamint az energiahatékonyság romlásában. Részletesebben, az aszinkron motor sebességének szabályozására szolgáló egyéb módszereket az archív fájl tartalmazza, amely az oldal alján letölthető.
Általában a többsebességű motorokat 2, 3 vagy 4 fordulatszámmal állítják elő, a 2-fokozatú motorokat pedig egy tekercseléssel állítják elő az állórészen, és a póluspárok számát 2: 1 = p2: pt, 3 sebességű motorok kapcsolják két tekercseléssel az állórészen, amelyek közül az egyiket 2: 1 kapcsolóval = Pr: Pi, 4 fokozatú motorokkal hajtjuk végre, két állórúddal az állórészen, amelyek mindegyike a póluspárok számával 2: 1 arányban történik. A többsebességű villanymotorok különböző gépekkel, áruszállító és személyi felvonókkal vannak felszerelve, a ventilátorok, szivattyúk stb.
Az aszinkron villanymotorok jelentős hátránya a forgásuk gyakoriságának viszonylag összetett szabályozása.
Az aszinkron villanymotorok forgási sebességének szabályozására szolgáló lehetséges módszerek a motor forgórész sebességére rögzített kifejezés elemzésével állapíthatók meg: n 2 = 60f 1 (1 ‑s)/p. A képlet elemzése azt mutatja, hogy az indukciós motor forgási sebessége megváltoztatható a rotor csúszásának megváltoztatásával sa pólusok száma rmotor vagy frekvencia f 1 tápfeszültség.
A frekvenciaszabályozás csúszó variációval lehetséges az állórész tekercsére alkalmazott feszültség változtatásával vagy a rotorkör aktív ellenállásának megváltoztatásával.
A frekvencia szabályozása az aktív ellenállás változásávalcsak aszinkron motoroknál lehetséges, fázis rotorral, amelynek tekercselésében (csúszógyűrűk segítségével) a motor beindításakor ugyanúgy bekapcsolódik egy további beállító ellenállás. Azonban az indítási ellenállás nem alkalmas sebességszabályozásra, mivel nem alkalmas folyamatos működésre. A beállítási ellenállásnak hosszú ideig ellen kell állnia az indítással összehasonlítható áramokra.
A rotorkör aktív ellenállásának növekedésével a motor forgórészének kritikus csúszásának értéke s a fenti képlettel összhangban növekszik.
Különböző kiegészítő ellenállásokkal együtt lehetséges a motor mechanikai jellemzőinek családja, például az 1. ábrán látható család. 11, amiből következik, hogy a rotorkörben az aktív ellenállás állandó növekedési pillanatával a motor tengelyén növekszik, a működési pont eltolódik egy másik mechanikai jellemzőtől, amely megfelel egy új, megnövekedett ellenállásnak. Növeli a rotor csúszását, és ezáltal csökken az indukciós motor forgórészének forgási gyakorisága. Ezzel a módszerrel szabályozható a csúszás széles tartományában, de csökkenő gyakorisággal a mechanikai jellemző merevsége zavar, és az elektromos veszteségek növekednek.
Sebességszabályozás a tápfeszültség változtatásávallehetséges, mivel a pillanat kritikus értéke M k, ezért az érték M(s) bármely csúszásnál arányos a tápfeszültség négyzetével U 1 2. A 12. ábrán látható görbékből kitűnik, hogy a motor tengelyén lévő állandó terhelési pillanattal a működési pont egy másik, csökkentett feszültségnek megfelelő mechanikai jellemzőtől a másikra vált. U 1. Növeli a rotor csúszását, és ezáltal csökken az indukciós motor forgórészének forgási gyakorisága. Az indukciós motor e módszerrel történő szabályozása csak kis csúszási tartományban lehetséges, amelyet a kritikus pillanat és a forgórészcsúszás korlátoz.
Meg kell jegyezni, hogy a feszültség csökkenése esetén a motor kritikus nyomatékának hirtelen csökkenése, a feszültség négyzetével arányos, és ezáltal a motor túlterhelési kapacitásának jelentős csökkenése a kritikus nyomaték sokasága alapján, ami korlátozza a leírt módszer alkalmazási körét.
Az aszinkron motor forgósebességének fokozatos szabályozása a jelzett módon, mókus-ketreces rotorral lehetséges, változások a pólusok számábana tekercselés szakaszainak átkapcsolása miatt, amelyet többsebességű motoroknál használnak. Az eljárás lényege abban áll, hogy a tápfeszültség állandó frekvenciáján egy indukciós motor forgási sebessége függ az állórész tekercsének pólusainak számától. Tehát, ha két vagy több különálló tekercs különböző számú póluspárral van elhelyezve egy aszinkronmotor állórészén, akkor amikor minden egyes tekercs külön-külön csatlakozik a hálózathoz, lehetséges a mágneses mező különböző forgási frekvenciáinak és így a rotornak a megszerzése. Sajnos ez a gazdaságos és viszonylag egyszerű módszer nem teszi lehetővé a motor fordulatszámának zökkenőmentes beállítását. Az iparág elsajátította a villamos motorok sorozatgyártását, amelynek forgási sebességét 2, 3 és 4-szeres lépésekben szabályozzák, áramkimaradás nélkül. Azt is meg kell jegyezni, hogy a többsebességű villanymotorok tervezése sokkal bonyolultabb, mint az egysebességű elektromos motorok, ami a felértékelődéshez vezet.
Az aszinkron motor forgási sebessége is beállítható. a tápfeszültség frekvenciájának megváltoztatása, de ezt a módszert gyakorlatilag nem használják erőteljes motorokhoz, mivel nincsenek egyszerű és költséghatékony eszközök, amelyek szabályozzák a nagy teljesítményű áramkörök áramának frekvenciáját. Ugyanakkor az erős és olcsó, vezérelt félvezető eszközök (diódák, tirisztorok) fejlesztése és ipari fejlesztése lehetővé teszi az egyszerű és megbízható frekvenciaváltók és az alacsony feszültségű átalakítók megvalósítását, amellyel könnyen beállíthatja az aszinkron villanymotor sebességét egy rövidzárlatú rotorral, amely jelentősen leegyszerűsíti a különböző mechanizmusok meghajtását, miközben gyakran nincs szükség a sebességváltókra, a sebességváltókra, a sebességváltókra.
17. oldal, 51. oldal
A modern AC hajtás alapja az aszinkron motorok. Ennek az elektromos hajtásnak a hatékonyságát nagyrészt a sebességszabályozás lehetőségei határozzák meg.
Az aszinkronmotorok képességeit a forgórész fordulatszám-szabályozásában a kifejezés határozza meg
.
Ebből a kifejezésből következik, hogy a forgás gyakorisága háromféleképpen állítható be: a frekvencia megváltoztatásával, a póluspárok számával p és csúszik s. Tekintsük részletesebben ezeket a módszereket.
Ez a módszer jelenleg a legígéretesebb. A frekvenciaváltást félvezetős frekvenciaváltóval végzik (4.28. Ábra, és). A frekvencia változásával párhuzamosan a feszültséget is szabályozzák, így biztosítva a mágneses fluxus állandóságát. A kifejezést, amely a stressz áramlását jelenti F,
,
Ebből következik, hogy a feszültséget a frekvencia arányában kell beállítani
![]() .
.
E törvénytől való eltérés az áramlás változásához vezet Fez nem kívánatos. Valójában, ahogy a fluxus növekszik, a mágneses áramkör telítettsége nő, az acél vesztesége és a mágnesező áram növekedése. Az áramlás csökkenése a motor maximális nyomatékának csökkenését és számos más nemkívánatos jelenséget okoz.
a ![]() a motor mechanikai jellemzőit a 3. ábrán mutatjuk be. 4,28 b fajta. Amikor a frekvencia csökken, a motor indítási nyomatéka növekszik, és a maximális érték enyhén csökken. A motor munkagépe kicsi marad, ami jellemzi a motor gazdaságos üzemmódját. Ennek ellenére a motor forgási gyakoriságának szabályozására szolgáló eljárás költsége nagyon magas, mivel a frekvenciaváltót teljes motor teljesítményen kell végrehajtani.
a motor mechanikai jellemzőit a 3. ábrán mutatjuk be. 4,28 b fajta. Amikor a frekvencia csökken, a motor indítási nyomatéka növekszik, és a maximális érték enyhén csökken. A motor munkagépe kicsi marad, ami jellemzi a motor gazdaságos üzemmódját. Ennek ellenére a motor forgási gyakoriságának szabályozására szolgáló eljárás költsége nagyon magas, mivel a frekvenciaváltót teljes motor teljesítményen kell végrehajtani.
Ez a szabályozási módszer, az előzővel ellentétben, csak a lépésekben lehetővé teszi a forgási sebesség változtatását. Olyan mechanizmusokban használatos, mint a fúvók, szállítószalagok, felvonók, felvonók. A kapcsolószámú pólusszámú motorokat hívják többsebességes. Jellemzően a többsebességű aszinkron motorokat két, három és négy sebességfokozatban hajtják végre. A kétfokozatú motorok egy tekercseléssel készülnek, ha a póluspárok száma megfelel a következő összefüggésnek:
.
Három- és négyfokozatú motorok két tekercseléssel kaphatók. A háromfokozatú motoroknál csak egy tekercselés történik a póluspárok számának megváltoztatásával, és a négyfokozatú motoroknál mindkét tekercset kétsebességű motorokként végzik. A többsebességű motorok forgórészének tekercselése rövidzárlat. Nem igényli a kapcsolási séma átkapcsolását, mivel a rotor tekercsének szükséges póluspárjainak számát az állórész mező automatikusan hozza létre.
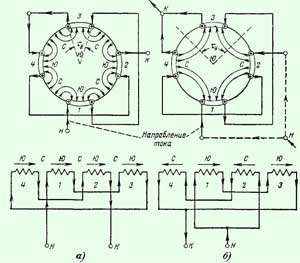
A pólusok számának változása az állórész tekercselési szakaszainak összekapcsolási sémájának megváltoztatásával történik. Az 1. ábrán 4.29 a csatlakozó szakaszok három változatát mutatja.
Az "a" opció megfelel a szekciók következetes konzonáns befogadásának, ebben az esetben egy mágneses mező van kialakítva pólusokkal. A „b” opcióban a második szakaszt egymás után kapcsolja be. A kapott mezőben oszlopok vannak. A tekercselési teljesítmény változatlan marad, ![]() és a motor által kifejlesztett pillanat felére csökken
és a motor által kifejlesztett pillanat felére csökken ![]() . A „b” opcióban a második szakaszt párhuzamos üzemmódban kapcsoljuk be. Az eredményül kapott mezőnek vannak pólusai is, de a tekercs teljesítménye
. A „b” opcióban a második szakaszt párhuzamos üzemmódban kapcsoljuk be. Az eredményül kapott mezőnek vannak pólusai is, de a tekercs teljesítménye ![]() megduplázódik, és a motor nyomatéka állandó marad
megduplázódik, és a motor nyomatéka állandó marad ![]() .
.
 |
Ezért a póluspárok számának megváltoztatásához szükséges, hogy a tekercs minden fázisa két azonos részből álljon. Ha mindkét részt ugyanolyan irányú áramok áramlik, akkor a pólusok száma, amikor az egyik változás iránya változik, a pólusok száma felére csökken. A pólusok számától a másikra történő átkapcsolásakor a pólus felosztás felére csökken, a háromfázisú tekercs fáziszónája 60 ° -ról 120 ° -ra változik (4.30. Ábra).
Mivel mindkét sebességnél a fázis forgása változatlan marad, a zónák áramának irányának megváltoztatása mellett szükséges a tekercs két fázisának cseréje. Nagyobb pólusszámmal a tekercselés átmérőjű szögben történik. Ezután kevesebb pólus.
Egy kis lépés a tekercs használatának romlásához és következésképpen a motor műszaki és gazdasági teljesítményének bizonyos csökkenéséhez vezet.
A többsebességű motorok különböző üzemmódokra vannak tervezve. A leggyakoribb módok állandó nyomatékkal és állandó erővel. A forgási frekvencia állandó nyomatékkal történő szabályozása akkor történik, ha a tekercs egy csillagról kettős csillagkörre vált (4.31. Ábra).
Egy ilyen kapcsolóval a hálózatból fogyasztott áram kétszer nő, következésképpen a motor teljesítménye, míg a pillanat nem változik.
Az indukciós motor csúszása különböző módon változtatható meg: az állórészre adott feszültség megváltoztatásával, a rotorkörbe való ellenállás bevezetésével, vagy egy további emf bevezetésével a rotorkörbe.
Amikor az állórész feszültsége változik, a motor mechanikai jellemzői megváltoznak, amint az a 2. ábrán látható. 4.33. A stressz csökkenése a mechanikai jellemző merevségének csökkenéséhez és a csúszás növekedéséhez vezet. Ugyanakkor a rotor sebessége csökken,
.
A sebességszabályozás ilyen módon a csúszás korlátozott tartományában lehetséges.
.
A forgási sebesség szabályozási módjának fő hátránya az a kis hatékonyság, amely a forgórész tekercsének veszteségeinek növekedésével jár, a csúszási frekvenciával arányosan.
.
 |
Ezért csak az automatikus vezérlőrendszerekben működő kis teljesítményű motorokra vonatkozik.
Fázis-forgórészes motorokban a forgási sebesség változtatható a rotor ellenállásának megváltoztatásával (4.34. Ábra).
Ennek a frekvenciaszabályozási eljárásnak az az előnye, hogy a maximális nyomaték változatlan marad. Fontos megjegyezni, hogy a motorveszteség egy részét ellenállásban hajtják végre, ezáltal megkönnyítve a motor termikus üzemmódját. A módszer többi része hasonló az előzőhöz, és alacsony hatékonysággal, a terheléstől függő kis szabályozási tartománygal és egy „puha” mechanikai jellemzővel jellemezhető.
A motor hatékonyságának növelése érdekében, amikor a forgási sebességet a csúszás megváltoztatásával állítja be, szükség van a csúszási teljesítmény használatára a hasznos munka elvégzéséhez vagy a hálózatba való visszajuttatásához. Ezt az ötletet végrehajtó rendszereket hívják kaszkád. Az egyik ilyen típusú áramkör az aszinkron szelep kaszkád áramkör (4.35. Ábra).
A séma egy aszinkron motort tartalmaz egy fázis rotorral (BP), egy dióda egyenirányítóval (D), egy simítócsővel (DR), egy tirisztoros inverterrel (I) és egy hálózati illesztő transzformátorral (Tr). A sebességszabályozás az inverter feszültségének megváltoztatásával történik. Ez a forgórész tekercs feszültségének megfelelő változásához vezet, és ezáltal a rotor forgási gyakoriságához. A motor forgórész tekercséből kivont csúszási frekvencia teljesítményét egy megfelelő transzformátoron keresztül továbbítják a hálózatba.
A kaszkádvezérlő áramkörök előnye az aszinkron motorok forgási sebességéhez képest az állórész áramkörben lévő frekvencia-szabályozó áramkörökhöz képest (4.28. Ábra) az, hogy a félvezető átalakítót a csúszási teljesítményen, nem pedig a motor teljes teljesítményén hajtják végre. Ez a körülmény különösen fontos a szivattyúk, prések, szállítószalagok, emelőmechanizmusok stb. Nagy teljesítményű és szuperhajtású hajtásaihoz, ahol korlátozott tartományban van a forgási sebesség szabályozása (2: 1 és kevesebb).
Az aszinkron szelep-kaszkád a kezeletlen egyenirányítóval csak a szinkronsebességtől lefelé irányítható. Ha szabályozott egyenirányítót használ, beállíthatja a sebességet a szinkronból. Ebben az esetben a csúszási teljesítmény átviteli iránya megfordul.