Барлық дерлік машиналар электр жетегі ретінде асинхронды қозғалтқыштармен жабдықталған. Олар қарапайым дизайнымен және құны жоғары емес. Осыған байланысты асинхронды қозғалтқыштың жылдамдығын бақылау маңызды. Дегенмен стандартты коммутациялық схемада революция механикалық трансмиссиялық жүйелердің көмегімен (беріліс қорабы, руль тартқыштары) ғана басқарыла алады, бұл әрдайым ыңғайлы емес. Ротордың жылдамдығын электрмен басқару артықшылығы бар, бірақ ол индукциялық қозғалтқыштың электр схемасын қиындатады.
Автоматты жабдықтың кейбір компоненттері үшін индукциялық қозғалтқыш білігінің айналу жылдамдығын электрлік реттеу қолайлы. Бұл жұмыс режимдерін тегіс және дәл баптауға жалғыз тәсілі. Ағынның жиілігін, кернеуін және пішінін басқару арқылы айналу жылдамдығын басқарудың бірнеше жолы бар. Олар диаграммада көрсетілген.
Суретте ұсынылған әдістердің ең көбі ротордың жылдамдығын реттеу үшін келесі параметрлердің өзгеруі:
Соңғы екі әдіс тиімділік пен электр қуатын жоғалтудың айтарлықтай төмендеуінсіз айналу жылдамдығын өзгертуге мүмкіндік береді, басқа түзету әдістері слиптің мөлшеріне бара-бар тиімділіктің төмендеуіне ықпал етеді. Бірақ сол және басқа адамдар өз артықшылықтары мен кемшіліктері бар. Өндірісте жиі жиі пайдаланылатын синхронды қозғалтқыштар бар, бұл электр қозғалтқыштардың осы түріне қатысты болады.
Үшін жиілік реттеуі негізінен жартылай өткізгіш түрлендіргіштер. Олардың жұмыс принципі асинхронды қозғалтқыштың ерекшеліктеріне негізделген, онда статор магнит өрісінің айналу жиілігі кернеудің жиілігіне байланысты. Статор өрісінің айналу жылдамдығы келесі формула бойынша анықталады:
n1 = 60f / p, мұндағы n1 өріс айналу жиілігі (айн / мин), жеткізу желісінің (Гц) f-жиілігі, р - статор полюстерінің жұптарының саны, 60 - өлшемді қайта есептеу коэффициенті.
Асинхронды қозғалтқышты жоғалтпай тиімді пайдалану үшін, берілген кернеуді жиілікпен бірге өзгерту керек. Кернеу жүктеме сәтіне байланысты өзгеруі керек. Егер жүктеме тұрақты болса, кернеу жиілікке қарай өзгереді.
Қазіргі заманғы жиіліктегі реттегіштер жылдамдығын азайтуға және кең көлемде ұлғайтуға мүмкіндік береді. Осылайша, олардың доғалық торлы көпконтактты машиналарда, мысалы, басқарылатын тарту арқылы жабдықта кең таралуы қамтамасыз етілді. Оларда валинтті қозғалтатын асинхронды қозғалтқыштың айналу жылдамдығы жартылай өткізгіш түрлендіргішпен реттеледі. Бұл реттеу операторға технологиялық операциялардың дұрыстығын бақылап, машина реттелген кезде жылдамдықты азайту немесе баяулату үшін мүмкіндік береді.
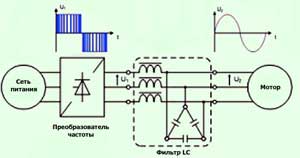
Жиілік түрлендіргішінің жұмыс принципі туралы толығырақ тоқталайық. Ол екі еселенген конверсия принципіне негізделген. Реттеуші құрылғы түзеткішті, импульстік инверторды және басқару жүйесін қамтиды. Түзеткіште синусоидалы кернеу тұрақты кернеуге айналады және түрлендіргішке беріледі. Үшфазалы импульстік инвертордың қуаты алты транзисторлық ажыратқыштарға ие. осы пернелер арқылы автоматты ток 120 ° фаза ығысу кері ток, соншалықты оң сәтте тікелей жеткізіледі тиісті орамасының, статор орамасының жеткізіледі. Осылайша тұрақты кернеу қажетті амплитудасының және жиіліктің үш фазалы кернеуіне айналады.
Қажетті параметрлер басқару модулі арқылы орнатылады. Пернелердің жұмысын автоматты түрде реттеу импульстік-ен модуляциясының қағидасына сәйкес жүзеге асырылады. Қуат қосқыштары күшті IGBT транзисторларын пайдаланады. Олар тиристорлармен салыстырғанда жоғары коммутациялық жиіліктерге ие және ең аз бұрмалануы бар дерлік синусоидалы ток шығарады. Осындай құрылғылардың практикалық екендігіне қарамастан, орта және жоғары қуатты қозғалтқыштар үшін олардың құны өте жоғары.
 Асинхронды қозғалтқыштың айналу жылдамдығын реттеу полюстердің жұп санының өзгеруі сондай-ақ ақжелкен электр қозғалтқыштары үшін ең таралған бақылау әдістеріне де қатысты. Мұндай қозғалтқыштар көп жылдамдық деп аталады. Бұл әдісті жүзеге асырудың екі жолы бар:
Асинхронды қозғалтқыштың айналу жылдамдығын реттеу полюстердің жұп санының өзгеруі сондай-ақ ақжелкен электр қозғалтқыштары үшін ең таралған бақылау әдістеріне де қатысты. Мұндай қозғалтқыштар көп жылдамдық деп аталады. Бұл әдісті жүзеге асырудың екі жолы бар:
Алғашқы жағдайда ойықтардың қосымша орамдарын салу үшін сымның көлденең қимасын азайту керек, бұл электр қозғалтқышының номиналды қуатын азайтуға әкеледі. Екінші жағдайда коммутациялық жабдықты, әсіресе үш және одан да көп жылдамдықтарда, сондай-ақ нашарлайтын энергетикалық өнімділіктің күрделілігі байқалады. Толық түрде, асинхронды қозғалтқыштың жылдамдығын басқарудың осы және басқа әдістерін беттің төменгі жағында жүктеуге болатын мұрағаттық файлда сипатталған.
Әдетте көп сатылы қозғалтқыштар 2, 3 немесе 4 айналу жылдамдықтарында жүргізіледі, 2 жылдамдықты қозғалтқыштар статорға бір орамасымен және 2: 1 = p2: pt, 3 жылдамдықты қозғалтқыштардағы полюс жұптарының санын ауыстырып, екі ораммен 2: 1 коэффициенті: Pr: Pi, 4 жылдамдықты электр қозғалтқыштары - статордағы екі орамасы бар, олардың әрқайсысы 2: 1 қатынасындағы полюс жұптарының қосқышымен орындалатын статорда. Көп сатылы электр қозғалтқыштары түрлі машиналармен, жүк және жолаушылар лифттерімен жабдықталған, олар желдеткіштерді, сорғыларды және т.б.
Асинхронды электр қозғалтқыштарының айтарлықтай кемшілігі олардың айналу жиілігінің салыстырмалы түрде күрделі реттеуі болып табылады.
Асинхронды электр қозғалтқыштарының айналу жылдамдығын басқарудың ықтимал жолдары қозғалтқыштың ротордың жылдамдығына есептелген білдіруді талдау арқылы орнатылуы мүмкін: n 2 = 60f 1 (1 ‑с)/с. Формуланы талдау индукция қозғалтқышының айналу жылдамдығын ротордың сырғуын өзгерту арқылы өзгертуге болатындығын көрсетеді сполюстер жұптарының саны сқозғалтқыш немесе жиілік f 1 кернеу кернеуі.
Жылжымалы өзгерістерге байланысты жиіліктік бақылау статор орамасына қолданылатын кернеуді өзгерту арқылы немесе ротордың тізбегіндегі белсенді қарсылығын өзгерту арқылы мүмкін болады.
Активті кедергісі өзгеруімен жиілікті бақылауфазалық роторлы асинхронды қозғалтқыштар ғана мүмкін, олардың орамында (сақиналық сақиналар көмегімен) қозғалтқышты қосқандағыдай қосымша реттеу кедергісі қосылады. Дегенмен, бастапқы қарсылық жылдамдықты басқару үшін қолайлы емес, себебі ол үздіксіз жұмыс істеу үшін арналмаған. Реттеу кедергісі ұзаққа созылған токтарға төтеп беруі керек.
Ротор тізбегінің белсенді қарсылығын жоғарылату арқылы қозғалтқыш роторының сыни сырғанау мәні с жоғарыда келтірілген формулаға сәйкес өседі.
Әр түрлі қосымша кедергілерді қосқанда, қозғалтқыштың механикалық сипаттамалары отбасын алуға болады, мысалы, күріш. 11, онда оның қозғалтқыш білігіне тұрақты жүктеме кезіндегі ротордың тізбегіндегі белсенді қарсылығын жоғарылату керек, жұмыс нүктесі жаңа механикалық сипаттамасынан екіншісіне ауысып, жаңа қарқындылыққа сәйкес келеді. Ротордың сырғуының ұлғаюы, демек, индукциялық қозғалтқыш роторының айналу жиілігінің төмендеуі байқалады. Бұл әдіспен реттеу әдісі слиптің кең ауқымында болуы мүмкін, бірақ азаятын жиілікте механикалық сипаттаманың қатаңдығы бұзылып, электр жоғалуы көбеюде.
Қуат кернеуін өзгерту арқылы жылдамдықты басқарубұл сәттің сыни құндылығы М k және, демек, мән М(с) кез келген слайдта кернеудің квадрасына пропорционалды U 1 2. 12-суретте көрсетілген қисықтардан байқалатын болсақ, қозғалтқыш білігіне тұрақты жүктеме моменті болған кезде, жұмыс нүктесі жаңа, төмендеген кернеуге сәйкес келетін бір механикалық сипаттан екіншісіне ауысады U 1. Ротордың сырғуының ұлғаюы, демек, индукциялық қозғалтқыш роторының айналу жиілігінің төмендеуі байқалады. Осы әдіспен индукциялы қозғалтқышты реттеу тек сыни сәтте және ротордың сырғытпасымен шектелген шағын слиптер ауқымында ғана мүмкін болады.
Кернеу төмендеген кезде кернеудің квадратына пропорционалды қозғалтқыштың крутящий сәтте күрт төмендеуі және, демек, сипатталған әдісті қолдану көлемін шектейтін сыни сәттің көптігі бойынша қозғалтқыштың жүктемесінің күрт төмендеуі байқалады.
Асинхронды қозғалтқыштың сақал-торды роторымен айналу жылдамдығын реттеу, көрсетілгендей, мүмкін полюстердің жұп санының өзгеруімоторлы қозғалтқыштар үшін пайдаланылатын орамасының секциясын ауыстыруына байланысты. әдісі тұрақты жиілігі кернеуі контуры, асинхронды қозғалтқыштың жылдамдық статор полюстерін жұп санына байланысты, бұл шын мәнінде тұрады. Осылайша, содан кейін жұп полюстер түрлі сандар екі немесе одан да көп жеке орамасының орналастыру асинхронды қозғалтқыш, электр дейін жеке орамдарда әрбір Статор болса, біз әр түрлі магнит өрісі айналу жылдамдығын, және, демек, ротордың алуға болады. Өкінішке орай, бұл үнемді және қарапайым әдіс қозғалтқыштың жылдамдығын реттеуге мүмкіндік бермейді. Өнеркәсіп электр қозғалтқыштарының серияларын игерді, олардың айналу жылдамдығы қуат жоғалтпай 2, 3 және 4 рет сатылармен реттеледі. Сондай-ақ, көп қозғалтқышты электр қозғалтқыштарының дизайны біртұтас электр қозғалтқыштарға қарағанда әлдеқайда күрделі, бұл оларды бағалауға әкеледі.
Асинхронды қозғалтқыштың айналу жылдамдығы да реттелуі мүмкін. жеткізу тогының жиілігін өзгерту, бірақ бұл әдіс қуатты қозғалтқыштар үшін қолданылмайды, өйткені жоғары қуатты электр тізбектеріндегі ток жиілігін реттейтін қарапайым және үнемді құрылғылардың жоқтығынан. Сонымен қатар, қуатты әрі арзан басқарылатын жартылай өткізгішті құрылғылар (диодтар, Тиристорлық) әзірлеу және коммерциялық даму, ол айтарлықтай, ол оңай тиін-ротордың бар асинхронды қозғалтқыштардың айналу жылдамдығын реттеу мүмкін болып табылатын арқылы, қарапайым және сенімді түрлендіргіштер жиілікті және кернеу кіші және орта қуаттағы жүзеге асыруға мүмкіндік береді әртүрлі тетіктердің жетілдірілуін жеңілдетеді, алайда жиіліктерге, трансмиссиялық қорапқа, трансмиссияға қажеттілік жоқ.
Page 17 of 51
Асинхронды қозғалтқыштар заманауи АЖ-нің негізі болып табылады. Бұл электржетектің тиімділігі көбінесе жылдамдық реттеу мүмкіндігімен анықталады.
Асинхронды қозғалтқыштардың ротордың айналу жылдамдығын бақылау тұрғысынан мүмкіндіктері өрнекпен анықталады
.
Осы өрнектен ротация жиілігі үш жолмен реттелуі мүмкін: жиіліктің өзгеруі, полюстер жұптарының саны с және сырғу с. Осы әдістердің әрқайсысын егжей-тегжейлі қарастырыңыз
Бұл әдіс қазіргі уақытта ең перспективалы болып табылады. Жиілік өзгерісі жартылай өткізгіш жиілік түрлендіргіші арқылы жүзеге асырылады (4.28-сурет, а). Магнит ағынының тұрақтылығын қамтамасыз ету үшін кернеу жиіліктің өзгеруімен қатар реттеледі. Стресті ағынға байланысты өрнектен F,
,
кернеу жиілікте пропорционалды түрде реттелуі керек
![]() .
.
Осы заңнан ауытқу ағынның өзгеруіне әкеледі Fбұл жағымсыз. Шынында да, ағынның көбеюі кезінде магнит тізбегінің қанықтылығы артып, болаттың жоғалуы және магнитизация токі артады. Ағынның азаюы қозғалтқыштың ең үлкен моментінің азаюына және бірқатар басқа жағымсыз әсерлерге әкеледі.
С ![]() қозғалтқыштың механикалық сипаттамалары суретте көрсетілген. 4.28, b түрі. Жиілік азайған кезде қозғалтқыштың іске қосу моменті артады, ал ең аз азаяды. Қозғалтқыштың жұмыс істемесі қозғалтқыштың үнемді жұмыс режимін сипаттайтын кішкентай болып қалады. Дегенмен, қозғалтқыштың айналу жиілігін бақылаудың осы әдісінің құны өте жоғары, себебі жиілік түрлендіргіші толық қозғалтқыш қуатында орындалуы керек.
қозғалтқыштың механикалық сипаттамалары суретте көрсетілген. 4.28, b түрі. Жиілік азайған кезде қозғалтқыштың іске қосу моменті артады, ал ең аз азаяды. Қозғалтқыштың жұмыс істемесі қозғалтқыштың үнемді жұмыс режимін сипаттайтын кішкентай болып қалады. Дегенмен, қозғалтқыштың айналу жиілігін бақылаудың осы әдісінің құны өте жоғары, себебі жиілік түрлендіргіші толық қозғалтқыш қуатында орындалуы керек.
Бұл реттегі реттеу әдісі, бұрынғыдан айырмашылығы, айналу жылдамдығын тек қадамдармен өзгертуге мүмкіндік береді. Ол желдеткіштер, конвейерлер, көтергіштер, элеваторлар сияқты механизмдерде қолданылады. Қозғалтқыштар полюстер жұптарының санын ауыстырады көп жылдамдықты. Әдетте, көп сатылы асинхронды қозғалтқыштар екі, үш және төрт жылдамдық қадамдарымен орындалады. Екі жылдамдықты электр қозғалтқыштары бір ораммен дайындалады, егер полюстер жұптарының саны келесі қатынасқа сәйкес келсе:
.
Үш және төрт жылдамдықты қозғалтқыштар екі ораммен жабдықталған. Үш жылдамдықты электр қозғалтқыштарында полюстер жұптарының санын ауыстырып, бір орамдау жүзеге асырылады, төрт жылдамдықты электр қозғалтқыштарда екі орамал екі жылдамдықпен орындалады. Көп айналмалы қозғалтқыштардың роторының орамасы қысқа тұйықталу. Қосылу схемасын ауыстыруды талап етпейді, себебі ротордың орамасының қажетті полюстерінің саны автоматты түрде статор өрісі арқылы қалыптасады.
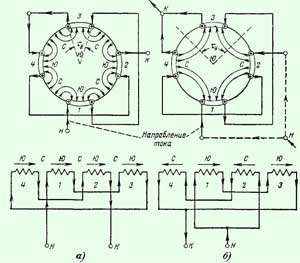
Полюстер санының өзгеруі статор орамасының секцияларының қосылу схемасын өзгерту арқылы жүзеге асырылады. Суретте. 4.29 қосылу бөлімдерінің үш нұсқасы көрсетілген.
«А» опциясы учаскелердің тұрақты үндестіруге сәйкес келеді, бұл жағдайда полюстері бар магнит өрісі қалыптасады. «B» опциясында екінші секция бір-біріне қарама-қарсы түрде қосылады. Алынған өріс полюстерге ие. Желінің қуаты өзгермейді, ![]() және қозғалтқыш арқылы әзірленген сәт екі есе азаяды,
және қозғалтқыш арқылы әзірленген сәт екі есе азаяды, ![]() . «B» опциясында екінші бөлім параллельді режимде қосылады. Алынған өрісте полюстер болады, бірақ орамның қуаты
. «B» опциясында екінші бөлім параллельді режимде қосылады. Алынған өрісте полюстер болады, бірақ орамның қуаты ![]() және қозғалтқыштың моменті тұрақты болып қалады
және қозғалтқыштың моменті тұрақты болып қалады ![]() .
.
 |
Осылайша, полюстер жұптарының санын өзгерту үшін ораманың әрбір фазасы екі бірдей бөліктен тұрады. Екі бөлік те бір бағытта ағып кеткен кезде, полюстердің саны, олардың біреуінде ағым бағыты өзгерсе, тіректердің саны екі есе азаяды. Полюстардың санын бірінен екіншісіне ауыстыру кезінде полюсті бөлу екі фазалық ораманың фазалық аймағы 60 ° -дан 120 ° -ге дейін өзгеріп отырады (4.30 сурет).
Екі жылдамдықтағы фазалық айналдыру бірдей болуы керек, өйткені аймақтардағы токтардың бағытын өзгертуден басқа орамның екі фазасын ауыстыру керек. Полюстердің көп саны орамның диаметральды қадамда орындалады. Содан кейін аз полюстермен.
Кішкене қадам орамның пайдалануының нашарлауына және, демек, қозғалтқыштың техникалық және экономикалық көрсеткіштерінің біршама төмендеуіне алып келеді.
Көп сатылы қозғалтқыштар түрлі жұмыс режимдеріне арналған. Тұрақты моментімен және тұрақты қуатымен ең көп таралған режимдер. Айналу жиілігін тұрақты крутящего жиіліктегі реттеу ораманың жұлдыздан қос жұлдыздық тізбеге ауысқан кезде беріледі (4.31-сурет).
Мұндай коммутатормен желіден тұтынылатын ток екі есе артады, демек, қозғалтқыш қуаты, уақыт өзгермейді.
Индукциялық қозғалтқыштың сырғуын әртүрлі тәсілмен өзгертуге болады: ротордың тізбегіне кедергі енгізу немесе ротордың тізбегіне қосымша эмфді енгізу арқылы статорға қолданылатын кернеуді өзгерту арқылы.
Статор кернеуі өзгерген кезде қозғалтқыштың механикалық сипаттамасы өзгереді, суретте көрсетілгендей. 4.33. Стресстің төмендеуі механикалық сипаттаманың қаттылығын төмендетуге және слиптің ұлғаюына әкеледі. Сонымен қатар, ротордың жылдамдығы төмендейді,
.
Осылайша жылдамдықтың реттелуі слиптің өзгеруінің шектеулі ауқымында мүмкін болады.
.
Айналу жылдамдығын бақылаудың осы әдісінің негізгі кемшілігі ротордың орамасындағы ысыраптардың слиптің жиілігіне қарай жоғарылауына байланысты төмен тиімділік болып табылады
.
 |
Сондықтан автоматты басқару жүйелерінде жұмыс істейтін төмен қуатты қозғалтқыштарға ғана қатысты.
Фазалық ротордың қозғалтқыштарында айналу жылдамдығын ротордың қарсылығын өзгерту арқылы өзгертуге болады (4.34-сурет).
Бұл жиіліктік бақылау әдісінің артықшылығы - максималды момент өзгеріссіз қалады. Қозғалтқыштың жоғалуының бір бөлігі резисторда жүзеге асырылып, қозғалтқыштың жылу режимін жеңілдететінін атап өту маңызды. Қалған әдісі бұрынғыға ұқсайды және жүктің деңгейіне және «жұмсақ» механикалық сипаттамаға байланысты төменгі тиімділікпен, шағын бақылау ауқымымен сипатталады.
Қозғалтқыштың айналу жылдамдығын реттеу кезінде қозғалтқыштың тиімділігін жоғарылату үшін пайдалы жұмысты орындау үшін сырғыма қуатын немесе оны желіге қайтару керек. Бұл идеяны жүзеге асыратын схемалар шақырылады каскадты түрде. Осы типтегі жалпы тізбектердің бірі - асинхронды клапан каскадтық тізбегі (4.35-сурет).
Схемаға фазалық ротордың (BP), диодты түзеткішті (D), тегістейтін шок (DR), тиристордың түрлендіргіші (I) және желінің үйлесімді трансформаторы (Tr) бар асинхронды қозғалтқыш кіреді. Жылдамдық реттеу инвертор кернеуін өзгерту арқылы жүзеге асырылады. Бұл ротордың орамасының кернеуіне сәйкес келеді, демек ротордың айналу жиілігі. Қозғалтқыштың роторлы орамасынан алынатын сырғыма жиілігінің қуаты сәйкес трансформатор арқылы желіге жіберіледі.
Асинхронды қозғалтқыштардың айналу жылдамдығын реттеу үшін каскадты басқару схемаларының артықшылығы стационарлық тізбектегі жиіліктік басқару тізбектерімен салыстырғанда (4.28-сурет) жартылай өткізгіштің түрлендіргіші толық қозғалтқыштың қуатында емес, жартылай өтетін қуатта орындалады. Бұл жағдай айналмалы жылдамдықты басқарудың шектеулі ауқымы қажет болатын (2: 1 және одан аз) сорғылардың, пресстердің, конвейерлердің, көтеру механизмдерінің және т.б. жоғары қуатты және супер қуатты жетектер үшін өте маңызды.
Басқарылмайтын түзеткішті асинхронды клапан каскадты реттеу синхронды жылдамдықтан төменге ғана реттеуге мүмкіндік береді. Егер басқарылатын түзеткішті қолдансаңыз, жылдамдықты синхронды түрде реттеуге болады. Бұл жағдайда сырғу қуатын беру бағыты кері қайтарылады.