Vrijwel alle machines zijn uitgerust met asynchrone motoren als elektrische aandrijving. Ze hebben een eenvoudig ontwerp en geen hoge kosten. In dit opzicht is het belangrijk om de snelheid van de asynchrone motor te regelen. In het standaard schakelcircuit kunnen de omwentelingen echter alleen worden geregeld met behulp van mechanische transmissiesystemen (versnellingsbakken, katrollen), hetgeen niet altijd gemakkelijk is. Elektrische regeling van de rotorsnelheid heeft meer voordelen, hoewel het bedradingsschema van een inductiemotor ingewikkeld is.
Voor sommige componenten van de automatische uitrusting is elektrische regeling van de rotatiesnelheid van de as van een asynchrone elektromotor geschikt. Dit is de enige manier om een vloeiende en nauwkeurige aanpassing van de bedieningsmodi te bereiken. Er zijn verschillende manieren om de rotatiesnelheid te regelen door de frequentie, spanning en vorm van de stroom te manipuleren. Ze worden allemaal in het diagram weergegeven.
Van de methoden die in de figuur worden weergegeven, is de meest gebruikelijke regeling van de rotorsnelheid de wijziging van de volgende parameters:
Met de laatste twee methoden kunt u de rotatiesnelheid wijzigen zonder een aanzienlijke afname in efficiëntie en vermogensverlies, terwijl de andere aanpassingsmethoden bijdragen aan een afname van de efficiëntie evenredig met de hoeveelheid slip. Maar die en anderen hebben hun voor- en nadelen. Omdat meestal asynchrone motoren met een eekhoornkooi rotor worden gebruikt in de productie, zullen alle verdere discussies over dit type elektromotoren gaan.
voor frequentieregulatie voornamelijk gebruikte halfgeleideromzetters. Hun werkingsprincipe is gebaseerd op de eigenaardigheden van de asynchrone motor, waarbij de rotatiefrequentie van het magnetische veld van de stator afhangt van de frequentie van de voedingsspanning. De rotatiesnelheid van het statorveld wordt bepaald door de volgende formule:
n1 = 60f / p, waarbij n1 de veldrotatiefrequentie (rpm) is, de f-frequentie van het voedingsnetwerk (Hz), p het aantal paren statorpolen is, 60 de herreke- ningscoëfficiënt van de dimensie is.
Voor een efficiënte werking van een asynchrone motor zonder verlies, is het noodzakelijk om de geleverde spanning samen met de frequentie te wijzigen. De spanning zou moeten veranderen afhankelijk van het laadmoment. Als de belasting constant is, verandert de spanning evenredig met de frequentie.
Met moderne frequentieregelaars kunt u de snelheid in een breed bereik verlagen en verhogen. Dit zorgde ervoor dat ze veelvuldig werden gebruikt in apparatuur met gecontroleerd trekken, bijvoorbeeld in machines met meerdere contacten van gelast gaas. Daarin wordt de draaisnelheid van de asynchrone motor, die de wikkelas aandrijft, geregeld door een halfgeleideromvormer. Met deze aanpassing kan de operator, die de juistheid van de technologische bewerkingen volgt, in stappen versnellen of vertragen terwijl de machine is afgestemd.
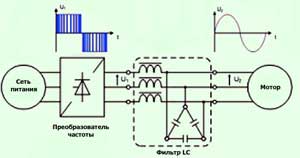
Laten we meer in detail stilstaan bij het werkingsprincipe van de frequentieomvormer. Het is gebaseerd op het principe van dubbele conversie. De regelaar bestaat uit een gelijkrichter, een pulsomvormer en een regelsysteem. In de gelijkrichter wordt de sinusvormige spanning omgezet in een constante spanning en aan de omvormer toegevoerd. De power driefasige pulsomvormer heeft zes transistorschakelaars. Via deze automatische toetsen wordt een constante spanning aangelegd op de statorwikkelingen, zodat op het juiste moment de directe wikkeling en vervolgens de tegenstroom met een faseverschuiving van 120 ° naar de bijbehorende wikkelingen vloeit. Aldus wordt de constante spanning getransformeerd in een wisselende driefasen spanning van de gewenste amplitude en frequentie.
De vereiste parameters worden ingesteld via de besturingsmodule. Automatische aanpassing van de werking van de toetsen wordt uitgevoerd volgens het principe van pulsbreedtemodulatie. Voedingsschakelaars maken gebruik van krachtige IGBT-transistors. Ze hebben, in vergelijking met thyristors, een hoge schakelfrequentie en produceren bijna sinusvormige stroom met minimale vervorming. Ondanks de bruikbaarheid van dergelijke apparaten, blijven hun kosten voor middelgrote en krachtige motoren zeer hoog.
 De rotatiesnelheid van de asynchrone motormethode aanpassen veranderingen in het aantal paren polen is ook van toepassing op de meest gebruikelijke regelmethoden voor eekhoornkooi-elektromotoren. Dergelijke motoren worden multi-speed genoemd. Er zijn twee manieren om deze methode te implementeren:
De rotatiesnelheid van de asynchrone motormethode aanpassen veranderingen in het aantal paren polen is ook van toepassing op de meest gebruikelijke regelmethoden voor eekhoornkooi-elektromotoren. Dergelijke motoren worden multi-speed genoemd. Er zijn twee manieren om deze methode te implementeren:
In het eerste geval is het, om extra windingen in de groeven te plaatsen, nodig om de dwarsdoorsnede van de draad te verkleinen, en dit leidt tot een afname in het nominale vermogen van de elektromotor. In het tweede geval is er een complicatie van schakelapparatuur, met name voor drie of meer snelheden, evenals verslechterde energieprestaties. Meer gedetailleerd worden deze en andere methoden voor het regelen van de snelheid van een asynchrone engine beschreven in het archiefbestand dat onderaan de pagina kan worden gedownload.
Gewoonlijk worden multi-speed motoren geproduceerd met 2, 3 of 4 rotatiesnelheden, waarbij 2-toerentallen worden geproduceerd met één wikkeling op de stator en het aantal poolparen wordt gewijzigd in de verhouding 2: 1 = p2: pt, 3-toerentallen motoren - met twee wikkelingen op de stator, waarvan een wordt uitgevoerd met een 2: 1 schakelaar = Pr: Pi, 4-toerentallen motoren - met twee wikkelingen op de stator, die elk worden uitgevoerd met een schakelaar van het aantal poolparen in de verhouding 2: 1. Multi-speed elektromotoren zijn uitgerust met verschillende machines, vracht- en passagiersliften, ze worden gebruikt om ventilatoren, pompen, enz. Aan te drijven.
Een belangrijk nadeel van asynchrone elektromotoren is de relatief complexe regeling van de frequentie van hun rotatie.
Mogelijke manieren om de rotatiesnelheid van asynchrone elektrische motoren te regelen, kan worden vastgesteld door de uitdrukking te analyseren die is vastgelegd voor de rotorsnelheid van de motor: n 2 = 60f 1 (1 ‑s)/p. Analyse van de formule laat zien dat de rotatiesnelheid van een inductiemotor kan worden veranderd door de slip van de rotor te veranderen shet aantal paren polen rmotor of frequentie f 1 voedingsspanning.
Frequentiecontrole door glijdende variatie is mogelijk door het variëren van de spanning die wordt aangelegd aan de statorwikkeling of door het veranderen van de actieve weerstand in het rotorcircuit.
Frequentiecontrole door actieve weerstandsveranderinghet is alleen mogelijk voor asynchrone motoren met een faserotor, in de wikkeling waarvan (door middel van sleepringen) een extra instelweerstand wordt ingeschakeld op dezelfde manier als bij het starten van de motor. De startweerstand is echter niet geschikt voor snelheidsregeling, omdat deze niet is ontworpen voor continu gebruik. De weerstand aanpassen moet bestand zijn tegen stromen die vergelijkbaar zijn met het starten, gedurende lange tijd.
Met een toename van de actieve weerstand van het rotorcircuit, de waarde van de kritische slip van de motorrotor s om in overeenstemming met de bovenstaande formule toeneemt.
Met inbegrip van verschillende extra weerstanden is het mogelijk om een familie van mechanische karakteristieken van de motor te verkrijgen, zoals die getoond in Fig. 11, waaruit volgt dat met een verhoging van de actieve weerstand in het rotorcircuit met een constant belastingsmoment op de motoras, het werkpunt verschuift van het ene mechanische kenmerk naar het andere, overeenkomend met een nieuwe, verhoogde weerstand. Er is een toename in de slip van de rotor, en bijgevolg een afname van de rotatiefrequentie van de rotor van een inductiemotor. Regeling met deze methode is mogelijk in een breed gebied van slip, echter met afnemende frequentie, wordt de stijfheid van de mechanische karakteristiek verstoord en nemen elektrische verliezen toe.
Snelheidsregeling door de voedingsspanning te wijzigenmogelijk vanwege het feit dat de kritieke waarde van het moment M k, en daarom de waarde M(s) bij elke slip is evenredig met het kwadraat van de voedingsspanning U 1 2. Het is duidelijk uit de curven getoond in Fig. 12 dat met een constant belastingsmoment op de motoras, het werkpunt verschuift van de ene mechanische karakteristiek naar een andere, corresponderend met een nieuwe, gereduceerde spanning U 1. Er is een toename in de slip van de rotor, en bijgevolg een afname van de rotatiefrequentie van de rotor van een inductiemotor. De regeling van de asynchrone motor met deze methode is alleen mogelijk in een klein slipbereik, dat wordt beperkt door het kritieke moment en de rotorslip.
Opgemerkt moet worden dat wanneer de spanning afneemt, er een scherpe afname in het kritische koppel van de motor is, evenredig met het kwadraat van de spanning en daarom een sterke afname van de overbelastingscapaciteit van de motor in termen van het veelvoud van het kritische koppel, hetgeen het toepassingsgebied van de beschreven werkwijze beperkt.
Stapregeling van de rotatiesnelheid van een asynchrone motor met een eekhoorn-kooi rotor, zoals aangegeven, is mogelijk door veranderingen in het aantal paren polenvanwege het schakelen van secties van zijn wikkeling, die wordt gebruikt voor motoren met meerdere snelheden. De essentie van de methode ligt in het feit dat bij een constante frequentie van de netspanning de rotatiesnelheid van een inductiemotor afhankelijk is van het aantal paren polen van de statorwikkeling. Als dus twee of meer afzonderlijke wikkelingen met verschillende aantallen poolparen op de stator van een asynchrone motor worden geplaatst, is het, wanneer elke wikkeling afzonderlijk met het netwerk is verbonden, mogelijk om verschillende rotatiefrequenties van het magnetische veld en dus de rotor te verkrijgen. Helaas maakt deze economische en relatief eenvoudige methode het niet mogelijk het motortoerental soepel aan te passen. De industrie heeft de productie van series elektrische motoren onder de knie, waarvan de rotatiesnelheid in stappen van 2, 3 en 4 keer wordt geregeld zonder verlies van vermogen. Het moet ook worden opgemerkt dat het ontwerp van multi-speed elektromotoren veel ingewikkelder is dan single-speed elektromotoren, wat tot hun waardering leidt.
De rotatiesnelheid van de asynchrone motor kan ook worden aangepast. veranderen van de frequentie van de voedingsstroom, maar deze methode wordt praktisch niet gebruikt voor krachtige motoren vanwege het ontbreken van eenvoudige en kosteneffectieve apparaten die de frequentie van de stroom in hoogvermogencircuits regelen. Tegelijkertijd kunnen dankzij de ontwikkeling en industriële ontwikkeling van krachtige en goedkope halfgeleiderapparaten (diodes, thyristors) eenvoudige en betrouwbare frequentieomvormers en laagspannings-omvormers worden geïmplementeerd, waarmee u eenvoudig de rotatiesnelheid van een asynchrone elektromotor met een kortgesloten rotor kunt aanpassen, die aanzienlijk vereenvoudigt de aandrijving van verschillende mechanismen, terwijl vaak geen versnellingsbakken, versnellingsbakken of transmissies nodig zijn.
Pagina 17 van 51
Asynchrone motoren vormen de basis van de moderne frequentieregelaar. De efficiëntie van deze elektrische aandrijving wordt grotendeels bepaald door de mogelijkheden van snelheidsregeling.
De mogelijkheden van asynchrone motoren in termen van rotorsnelheidsregeling worden bepaald door de uitdrukking
.
Uit deze uitdrukking volgt dat de rotatiefrequentie op drie manieren kan worden aangepast: door de frequentie te veranderen, het aantal paren van polen p en uitglijden s. Overweeg elk van deze methoden in meer detail.
Deze methode is momenteel de meest veelbelovende. De frequentieverandering wordt uitgevoerd met behulp van een halfgeleider frequentie-omvormer (figuur 4.28, en). Gelijktijdig met de verandering in frequentie, wordt de spanning ook geregeld, om de constantheid van de magnetische flux te verzekeren. Van de uitdrukking met betrekking tot stress tot flow F,
,
hieruit volgt dat de spanning moet worden aangepast in verhouding tot de frequentie
![]() .
.
Afwijking van deze wet leidt tot een verandering in de stroom Fdat is ongewenst. Inderdaad, als de flux toeneemt, neemt de verzadiging van het magnetische circuit toe, nemen de verliezen in staal en de magnetiserende stroom toe. De afname in stroming veroorzaakt een afname van het maximale koppel van de motor en een aantal andere ongewenste verschijnselen.
bij ![]() mechanische karakteristieken van de motor worden getoond in Fig. 4.28 b soort van. Wanneer de frequentie afneemt, neemt het startkoppel van de motor toe en neemt het maximum enigszins af. De werkstrook van de motor blijft klein, wat de economische bedrijfsmodus van de motor kenmerkt. De kosten van deze methode voor het regelen van de rotatiefrequentie van de motor zijn echter zeer hoog, aangezien de frequentie-omvormer moet worden uitgevoerd bij vol motorvermogen.
mechanische karakteristieken van de motor worden getoond in Fig. 4.28 b soort van. Wanneer de frequentie afneemt, neemt het startkoppel van de motor toe en neemt het maximum enigszins af. De werkstrook van de motor blijft klein, wat de economische bedrijfsmodus van de motor kenmerkt. De kosten van deze methode voor het regelen van de rotatiefrequentie van de motor zijn echter zeer hoog, aangezien de frequentie-omvormer moet worden uitgevoerd bij vol motorvermogen.
Deze regelmethode, in tegenstelling tot de vorige, maakt het mogelijk om de draaisnelheid alleen in stappen te wijzigen. Het wordt gebruikt in mechanismen zoals blowers, transportbanden, liften, liften. Motoren met een aantal schakelparen worden genoemd multi-speed. Typisch, asynchrone motoren met meerdere snelheden worden uitgevoerd met stappen van twee, drie en vier snelheden. Motoren met twee snelheden worden met één omwenteling vervaardigd, als de nummers van de poolparen overeenkomen met de volgende relatie:
.
Drie- en vierversnellingsmotoren zijn beschikbaar met twee wikkelingen. Bij motoren met drie snelheden wordt slechts één wikkeling uitgevoerd door het aantal poolparen om te schakelen, en bij motoren met vier snelheden worden beide wikkelingen als tweesnelheidsmotoren uitgevoerd. De wikkeling van de rotor van motoren met meerdere snelheden is kortgesloten. Het vereist geen omschakeling van het verbindingsschema, aangezien het vereiste aantal poolparen van de rotorwikkeling automatisch wordt gevormd door het statorveld.
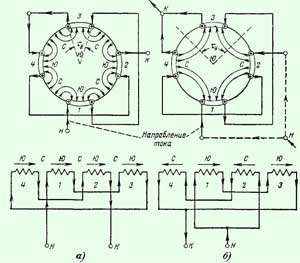
De verandering in het aantal polen wordt uitgevoerd door het verbindingsschema van de statorwikkelingsecties te wijzigen. In Fig. 4.29 toont drie varianten van verbindingssecties.
Optie "a" komt overeen met de consistente medeklinker-insluiting van secties, in dit geval wordt een magnetisch veld met polen gevormd. In optie "b" wordt de tweede sectie achtereenvolgens ingeschakeld. Het resulterende veld heeft palen. Wikkelkracht blijft ongewijzigd, ![]() en het moment ontwikkeld door de motor is gehalveerd,
en het moment ontwikkeld door de motor is gehalveerd, ![]() . In optie "b" is de tweede sectie ingeschakeld in anti-parallelle modus. Het resulterende veld zal ook palen hebben, maar de kracht van de wikkeling
. In optie "b" is de tweede sectie ingeschakeld in anti-parallelle modus. Het resulterende veld zal ook palen hebben, maar de kracht van de wikkeling ![]() verdubbelt en het motorkoppel constant blijft
verdubbelt en het motorkoppel constant blijft ![]() .
.
 |
Om dus het aantal paalparen in relatie te veranderen, is het noodzakelijk dat elke fase van de wikkeling uit twee identieke delen bestaat. Wanneer beide delen worden gevoed door stromen van dezelfde richting, neemt het aantal polen af met een factor twee wanneer de richting van de stroom in een van beide verandert. Bij het schakelen van het aantal polen van de ene naar de andere wordt de poolverdeling gehalveerd, waarbij de fasezone van de driefasenwikkeling verandert van 60 ° naar 120 ° (fig. 4.30).
Aangezien de faserotatie voor beide snelheden hetzelfde moet blijven, moet naast de verandering van de richting van de stromen in de zones, de twee fasen van de wikkeling worden verwisseld. Bij een groter aantal polen wordt de wikkeling in diametrische pitch uitgevoerd. Dan met minder palen.
Een kleine stap leidt tot een verslechtering van het gebruik van de wikkeling en dientengevolge tot een zekere afname van de technische en economische prestaties van de motor.
Multi-speed motoren zijn ontworpen voor verschillende bedrijfsmodi. De meest gebruikte modi met constant koppel en constant vermogen. Regeling van de rotatiefrequentie met een constant koppel wordt verschaft wanneer de wikkeling schakelt van een ster naar een dubbelsterrencircuit (figuur 4.31).
Met zo'n schakelaar neemt de stroom die door het netwerk wordt verbruikt tweemaal toe, en daarmee het motorvermogen, terwijl het moment niet verandert.
De slip van een inductiemotor kan op verschillende manieren worden veranderd: door de spanning op de stator aan te passen, door weerstand in het rotorcircuit te introduceren of door een extra emf in het rotorcircuit aan te brengen.
Wanneer de statorspanning verandert, verandert de mechanische karakteristiek van de motor, zoals getoond in Fig. 4.33. Een afname in spanning leidt tot een afname van de stijfheid van de mechanische karakteristiek en een toename in slip. Tegelijkertijd neemt de rotorsnelheid af,
.
Snelheidsregeling op deze manier is mogelijk in een beperkt bereik van variatie van de slip.
.
Het belangrijkste nadeel van deze methode voor het regelen van de rotatiesnelheid is het lage rendement als gevolg van de toename van verliezen in de rotorwikkeling in verhouding tot de slipfrequentie
.
 |
Daarom is het alleen van toepassing op motoren met een laag vermogen die in automatische regelsystemen werken.
Bij motoren met een faserotor kan het toerental worden gewijzigd door de weerstand in de rotor te veranderen (fig. 4.34).
Het voordeel van deze frequentieregelingsmethode is dat het maximale koppel onveranderd blijft. Het is ook belangrijk op te merken dat een deel van het motorverlies wordt uitgevoerd in een weerstand, waardoor de thermische modus van de motor wordt vergemakkelijkt. De rest van de methode is vergelijkbaar met de vorige en wordt gekenmerkt door een laag rendement, een klein regelbereik, afhankelijk van de belasting, en een "zachte" mechanische karakteristiek.
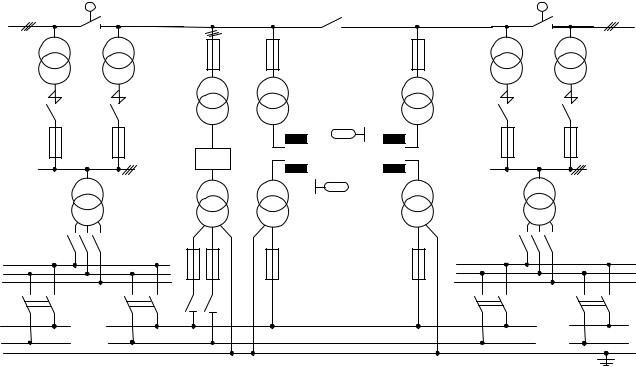
Om de efficiëntie van de motor te verhogen bij het aanpassen van de rotatiesnelheid door de slip te wijzigen, moet u de slipkracht gebruiken om nuttig werk uit te voeren of terug te zetten naar het netwerk. De schema's die dit idee implementeren worden genoemd cascade. Een van de gebruikelijke circuits van dit type is het cascadecircuit met asynchrone klep (fig. 4.35).
Het schema omvat een asynchrone motor met een faserotor (BP), een diodegelijkrichter (D), een afvlakspoel (DR), een thyristorinverter (I) en een transformator voor netwerkaanpassing (Tr). Snelheidsregeling wordt uitgevoerd door de spanning van de omvormer te wijzigen. Dit leidt tot een corresponderende verandering in de spanning van de rotorwikkeling, en dus de rotatiefrequentie van de rotor. De kracht van de slipfrequentie die uit de rotorwikkeling van de motor wordt gehaald, wordt via een bijpassende transformator naar het netwerk verzonden.
Het voordeel van cascaderegelkringen voor de rotatiesnelheid van asynchrone motoren in vergelijking met frequentiebesturingscircuits in de statorschakeling (figuur 4.28) is dat de halfgeleideromvormer wordt uitgevoerd op slipvermogen en niet op het volledige vermogen van de motor. Deze omstandigheid is vooral belangrijk voor hoogvermogen- en supervermogenaandrijvingen van pompen, persen, transportbanden, hefmechanismen, enz., Waarbij een beperkt bereik van toerentalregeling vereist is (2: 1 en minder).
Asynchrone klepcascade met niet-beheerde gelijkrichter maakt regeling alleen mogelijk vanaf de synchrone snelheid naar beneden. Als u een bestuurde gelijkrichter gebruikt, kunt u de snelheid aanpassen vanaf de synchrone. In dit geval is de richting van de overdracht van het slipvermogen omgekeerd.