Prawie wszystkie maszyny są wyposażone w silniki asynchroniczne, takie jak napęd elektryczny. Mają prostą konstrukcję, a nie wysokie koszty. W związku z tym ważne jest kontrolowanie prędkości silnika asynchronicznego. Jednak w standardowym obwodzie przełączającym jego obroty można kontrolować tylko za pomocą mechanicznych układów przeniesienia napędu (skrzyń biegów, kół pasowych), co nie zawsze jest wygodne. Sterowanie elektryczne prędkością wirnika ma więcej zalet, chociaż komplikuje schemat elektryczny silnika indukcyjnego.
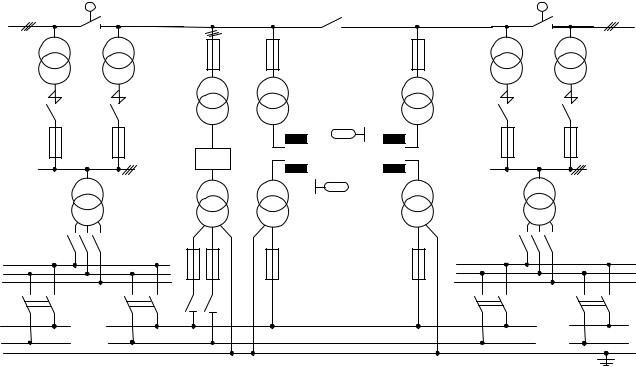
W przypadku niektórych elementów wyposażenia automatycznego odpowiednia jest elektryczna regulacja prędkości obrotowej wału asynchronicznego silnika elektrycznego. Jest to jedyny sposób uzyskania płynnej i precyzyjnej regulacji trybów pracy. Istnieje kilka sposobów kontrolowania prędkości obrotowej poprzez manipulowanie częstotliwością, napięciem i kształtem prądu. Wszystkie są pokazane na schemacie.
Spośród metod przedstawionych na rysunku najpowszechniejszym sposobem regulacji prędkości wirnika jest zmiana następujących parametrów:
Dwie ostatnie metody pozwalają na zmianę prędkości obrotowej bez znaczącego spadku wydajności i strat mocy, inne metody regulacji przyczyniają się do zmniejszenia wydajności proporcjonalnej do wielkości poślizgu. Ale te i inne mają swoje wady i zalety. Ponieważ w produkcji wykorzystywane są najczęściej silniki asynchroniczne z wirnikiem klatkowym, wszystkie dalsze dyskusje będą dotyczyć tego typu silników elektrycznych.
Dla regulacja częstotliwości głównie używane konwertery półprzewodnikowe. Ich zasada działania opiera się na specyfice silnika asynchronicznego, w którym częstotliwość obrotu pola magnetycznego stojana zależy od częstotliwości napięcia zasilania. Prędkość obrotowa pola stojana jest określona następującą formułą:
n1 = 60f / p, gdzie n1 jest częstotliwością obrotu pola (rpm), częstotliwością f sieci zasilającej (Hz), p jest liczbą par biegunów stojana, 60 jest współczynnikiem ponownego obliczenia wymiaru.
W celu sprawnego działania silnika asynchronicznego bez strat konieczna jest zmiana napięcia zasilającego wraz z częstotliwością. Napięcie powinno się zmieniać w zależności od momentu obciążenia. Jeśli obciążenie jest stałe, napięcie zmienia się proporcjonalnie do częstotliwości.
Nowoczesne regulatory częstotliwości pozwalają zmniejszyć i zwiększyć prędkość w szerokim zakresie. Zapewniło to ich szerokie zastosowanie w sprzęcie z kontrolowanym ciągnięciem, na przykład w wielostronnych maszynach spawanej siatki. W nich prędkość obrotowa silnika asynchronicznego, który napędza wałek naciągowy, jest regulowana za pomocą konwertera półprzewodnikowego. Ta regulacja umożliwia operatorowi śledzenie poprawności operacji technologicznych, przyspieszanie lub zwalnianie w krokach po dostrojeniu maszyny.
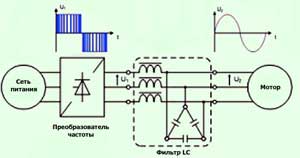
Przyjrzyjmy się bliżej zasadzie działania przetwornicy częstotliwości. Opiera się na zasadzie podwójnej konwersji. Regulator składa się z prostownika, falownika i układu sterowania. W prostowniku napięcie sinusoidalne jest przekształcane na stałe napięcie i podawane do falownika. Trójfazowy falownik mocy ma sześć przełączników tranzystorowych. Poprzez te automatyczne klucze, stałe napięcie jest podawane na uzwojenia stojana, tak że w odpowiednim momencie, uzwojenie bezpośrednie i prąd wsteczny z przesunięciem fazowym o 120 ° docierają do odpowiednich uzwojeń. W ten sposób stałe napięcie jest przekształcane na przemienne napięcie trójfazowe o pożądanej amplitudzie i częstotliwości.
Wymagane parametry ustawia się za pomocą modułu sterującego. Automatyczna regulacja działania klawiszy odbywa się zgodnie z zasadą modulacji szerokości impulsu. Przełączniki zasilania wykorzystują potężne tranzystory IGBT. W porównaniu z tyrystorami mają wysoką częstotliwość przełączania i wytwarzają prąd prawie sinusoidalny przy minimalnych zniekształceniach. Pomimo praktyczności takich urządzeń, ich koszt dla silników średniej i dużej mocy pozostaje bardzo wysoki.
 Regulacja prędkości obrotowej silnika asynchronicznego zmiany liczby par biegunów dotyczy również najbardziej powszechnych metod sterowania silnikami elektrycznymi klatkowymi. Takie silniki nazywane są wielobiegunowo. Istnieją dwa sposoby wdrożenia tej metody:
Regulacja prędkości obrotowej silnika asynchronicznego zmiany liczby par biegunów dotyczy również najbardziej powszechnych metod sterowania silnikami elektrycznymi klatkowymi. Takie silniki nazywane są wielobiegunowo. Istnieją dwa sposoby wdrożenia tej metody:
W pierwszym przypadku, aby umieścić dodatkowe zwoje w rowkach, konieczne jest zmniejszenie przekroju poprzecznego drutu, a to prowadzi do zmniejszenia mocy znamionowej silnika elektrycznego. W drugim przypadku występuje komplikacja urządzeń przełączających, zwłaszcza dla trzech lub więcej prędkości, a także pogorszenie charakterystyki energetycznej. Bardziej szczegółowo, ta i inne metody kontrolowania prędkości silnika asynchronicznego są opisane w pliku archiwum, który można pobrać na dole strony.
Zwykle silniki wielobiegowe są produkowane z 2, 3 lub 4 prędkościami obrotowymi, przy produkcji silników 2-biegowych z jednym uzwojeniem na stojanie i przełączaniu liczby par biegunów w stosunku 2: 1 = p2: pt, silniki 3-biegowe - z dwoma uzwojeniami na stojanie, którego dokonuje się za pomocą przełącznika 2: 1 = Pr: Pi, silniki 4-biegowe - z dwoma uzwojeniami na stojanie, z których każdy jest realizowany za pomocą przełącznika liczby par biegunów w stosunku 2: 1. Wielobiegowe silniki elektryczne są wyposażone w różne maszyny, windy towarowe i osobowe, służą do napędzania wentylatorów, pomp itp.
Istotną wadą asynchronicznych silników elektrycznych jest stosunkowo złożona regulacja częstotliwości ich obrotów.
Możliwe sposoby kontrolowania prędkości obrotowej asynchronicznych silników elektrycznych można ustalić analizując wyrażenie zarejestrowane dla prędkości wirnika silnika: n 2 = 60f 1 (1 ‑s)/str. Analiza wzoru pokazuje, że prędkość obrotową silnika indukcyjnego można zmienić poprzez zmianę poślizgu wirnika sliczba par biegunów strsilnik lub częstotliwość f 1 napięcie zasilania.
Kontrola częstotliwości poprzez zmianę poślizgu jest możliwa poprzez zmianę napięcia przyłożonego do uzwojenia stojana lub przez zmianę aktywnego oporu w obwodzie wirnika.
Kontrola częstotliwości poprzez aktywną zmianę rezystancjijest to możliwe tylko w przypadku silników asynchronicznych z wirnikiem fazowym, których uzwojenie (za pomocą pierścieni ślizgowych) powoduje dodatkową rezystancję regulacji w taki sam sposób, jak przy uruchamianiu silnika. Jednak opór początkowy nie jest odpowiedni do sterowania prędkością, ponieważ nie jest przeznaczony do pracy ciągłej. Regulacja oporu musi wytrzymywać prądy porównywalne do rozruchu, przez długi czas.
Wraz ze wzrostem aktywnego oporu obwodu wirnika, wartość krytycznego poślizgu wirnika silnika s zgodnie z powyższą formułą wzrasta.
Wraz z różnymi dodatkowymi rezystancjami możliwe jest uzyskanie rodziny właściwości mechanicznych silnika, takich jak te pokazane na rys. 11, z czego wynika, że wraz ze wzrostem rezystancji czynnej w obwodzie wirnika ze stałym momentem obciążenia na wale silnika, punkt pracy przesuwa się z jednej charakterystyki mechanicznej do drugiej, co odpowiada nowemu, zwiększonemu oporowi. Występuje wzrost poślizgu wirnika, aw konsekwencji spadek częstotliwości obrotu wirnika silnika indukcyjnego. Regulacja za pomocą tej metody jest możliwa w szerokim zakresie poślizgu, jednak z malejącą częstotliwością sztywność charakterystyki mechanicznej zostaje zakłócona i zwiększają się straty elektryczne.
Kontrola prędkości poprzez zmianę napięcia zasilaniamożliwe ze względu na fakt, że krytyczna wartość chwili M k, a zatem wartość M(s) przy każdym poślizgu jest proporcjonalna do kwadratu napięcia zasilającego U 1 2. Z krzywych pokazanych na rys. 12 wynika, że przy stałym momencie obciążenia na wale silnika punkt pracy zmienia się z jednej charakterystyki mechanicznej na drugą, co odpowiada nowemu, zmniejszonemu napięciu U 1. Występuje wzrost poślizgu wirnika, aw konsekwencji spadek częstotliwości obrotu wirnika silnika indukcyjnego. Regulacja silnika indukcyjnego za pomocą tej metody jest możliwa tylko w niewielkim zakresie poślizgu, który jest ograniczony momentem krytycznym i poślizgiem wirnika.
Należy zauważyć, że gdy napięcie maleje, następuje gwałtowny spadek krytycznego momentu obrotowego silnika, proporcjonalny do kwadratu napięcia, a zatem gwałtowny spadek mocy przeciążeniowej silnika pod względem wielości krytycznego momentu obrotowego, co ogranicza zakres zastosowania opisanej metody.
Regulacja krokowa prędkości obrotowej silnika asynchronicznego z wirnikiem klatkowym, jak wskazano, jest możliwa przez zmiany liczby par biegunówze względu na przełączanie sekcji uzwojenia, które jest wykorzystywane do silników wielobiegowych. Istota tej metody polega na tym, że przy stałej częstotliwości napięcia sieciowego prędkość obrotowa silnika indukcyjnego zależy od liczby par biegunów uzwojenia stojana. Tak więc, jeżeli dwa lub więcej oddzielnych uzwojeń o różnej liczbie par biegunów są umieszczone na stojanie silnika asynchronicznego, wówczas, gdy każde zwojnie jest podłączone osobno do sieci, możliwe jest uzyskanie różnych częstotliwości obrotu pola magnetycznego, a zatem i wirnika. Niestety ta ekonomiczna i stosunkowo prosta metoda nie pozwala na płynną regulację prędkości silnika. Przemysł opanował produkcję seryjnych silników elektrycznych, których prędkość obrotowa jest regulowana w krokach 2, 3 i 4 razy bez utraty mocy. Należy również zauważyć, że projektowanie wieloobrotowych silników elektrycznych jest znacznie bardziej skomplikowane niż jednobiegowe silniki elektryczne, co prowadzi do ich uznania.
Prędkość obrotową silnika asynchronicznego można również regulować. zmiana częstotliwości prądu zasilania, ale ta metoda jest praktycznie nieużywana dla potężnych silników ze względu na brak prostych i ekonomicznych urządzeń, które regulują częstotliwość prądu w obwodach dużej mocy. Jednocześnie rozwój i rozwój przemysłowy potężnych i tanich sterowanych urządzeń półprzewodnikowych (diod, tyrystorów) pozwala na zastosowanie prostych i niezawodnych przetwornic częstotliwości i niskonapięciowych przetwornic mocy, dzięki którym można łatwo dostosować prędkość obrotową asynchronicznego silnika elektrycznego ze zwartym wirnikiem, co znacznie upraszcza napęd różnych mechanizmów, a często nie ma potrzeby stosowania skrzyń biegów, skrzyń biegów, przekładni.
Strona 17 z 51
Silniki asynchroniczne są podstawą nowoczesnego napędu prądu przemiennego. Wydajność tego napędu elektrycznego w dużej mierze zależy od możliwości regulacji prędkości.
Możliwości silników asynchronicznych pod względem prędkości obrotowej wirnika są określone przez wyrażenie
.
Z tego wyrażenia wynika, że częstotliwość obrotu można regulować na trzy sposoby: zmieniając częstotliwość, liczbę par biegunów str i poślizg s. Rozważ każdą z tych metod bardziej szczegółowo.
Ta metoda jest obecnie najbardziej obiecująca. Zmiana częstotliwości odbywa się za pomocą półprzewodnikowej przetwornicy częstotliwości (ryc. 4.28, a). Równocześnie ze zmianą częstotliwości napięcie jest również regulowane, aby zapewnić stałość strumienia magnetycznego. Od wyrażenia związanego ze stresem do przepływu F,
,
wynika z tego, że napięcie należy regulować proporcjonalnie do częstotliwości
![]() .
.
Odchylenie od tej ustawy prowadzi do zmiany przepływu Fto jest niepożądane. Rzeczywiście, wraz ze wzrostem strumienia zwiększa się nasycenie obwodu magnetycznego, wzrastają straty stali i prąd magnesujący. Spadek przepływu powoduje zmniejszenie maksymalnego momentu obrotowego silnika i szereg innych niepożądanych zjawisk.
Dzięki ![]() charakterystyki mechaniczne silnika przedstawiono na rys. 4,28, b rodzaj. Kiedy częstotliwość spada, początkowy moment obrotowy silnika wzrasta, a maksimum nieznacznie maleje. Zużycie robocze silnika pozostaje małe, co charakteryzuje ekonomiczny tryb pracy silnika. Jednak koszt tej metody kontrolowania częstotliwości obrotów silnika jest bardzo wysoki, ponieważ przetwornica częstotliwości musi być wykonana przy pełnej mocy silnika.
charakterystyki mechaniczne silnika przedstawiono na rys. 4,28, b rodzaj. Kiedy częstotliwość spada, początkowy moment obrotowy silnika wzrasta, a maksimum nieznacznie maleje. Zużycie robocze silnika pozostaje małe, co charakteryzuje ekonomiczny tryb pracy silnika. Jednak koszt tej metody kontrolowania częstotliwości obrotów silnika jest bardzo wysoki, ponieważ przetwornica częstotliwości musi być wykonana przy pełnej mocy silnika.
Ta metoda regulacji, w przeciwieństwie do poprzedniej, umożliwia zmianę prędkości obrotowej tylko krokami. Stosowany jest w takich mechanizmach jak dmuchawy, przenośniki, windy, windy. Używane są silniki o liczbie przełączeń par biegunów wiele prędkości. Zwykle silniki asynchroniczne z wieloma prędkościami są wykonywane w dwóch, trzech i czterech krokach prędkości. Silniki dwubiegowe są produkowane z jednym uzwojeniem, jeśli liczby par biegunów odpowiadają następującej zależności:
.
Silniki trzy- i czterobiegowe są dostępne z dwoma uzwojeniami. W silnikach trójbiegowych wykonuje się tylko jedno uzwojenie z przełączaniem liczby par biegunów, aw silnikach czteroobrotowych oba uzwojenia są wykonywane z dwoma prędkościami. Uzwojenie wirnika silników wielobiegowych jest zwarte. Nie wymaga przełączania schematu połączenia, ponieważ wymagana liczba par biegunów uzwojenia wirnika jest tworzona automatycznie przez pole stojana.
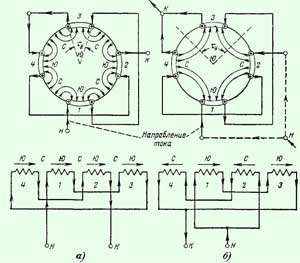
Zmiana liczby biegunów odbywa się poprzez zmianę schematu połączeń sekcji uzwojenia stojana. Na rys. 4.29 pokazuje trzy warianty łączących się sekcji.
Opcja "a" odpowiada konsekwentnemu włączeniu spółgłosek w sekcje, w tym przypadku powstaje pole magnetyczne z biegunami. W opcji "b" druga sekcja jest włączana przeciwnie. Wynikowe pole ma bieguny. Moc nawijania pozostaje niezmieniona, ![]() a moment opracowany przez silnik jest o połowę krótszy,
a moment opracowany przez silnik jest o połowę krótszy, ![]() . W opcji "b" druga sekcja jest włączana w trybie antyrównoległym. Powstałe pole będzie miało również bieguny, ale moc uzwojenia
. W opcji "b" druga sekcja jest włączana w trybie antyrównoległym. Powstałe pole będzie miało również bieguny, ale moc uzwojenia ![]() podwaja się, a moment obrotowy silnika pozostaje stały
podwaja się, a moment obrotowy silnika pozostaje stały ![]() .
.
 |
Tak więc, aby zmienić liczbę par biegunów w związku, konieczne jest, aby każda faza uzwojenia składała się z dwóch identycznych części. Kiedy obie części przepływają przez prądy o tym samym kierunku, liczba biegunów, gdy kierunek prądu zmienia się w jednym z nich, liczba biegunów jest o połowę mniejsza. Podczas przełączania liczby biegunów z jednego na drugi, podziałka bieguna jest zmniejszana o połowę, a strefa fazowa uzwojenia trójfazowego zmienia się z 60 ° na 120 ° (rys. 4.30).
Ponieważ rotacja faz dla obu prędkości powinna pozostać taka sama, oprócz zmiany kierunku prądów w strefach, konieczne jest zamienić dwie fazy uzwojenia. Przy większej liczbie biegunów nawijanie odbywa się w skoku średnicowym. Następnie z mniejszą liczbą biegunów.
Mały krok prowadzi do pogorszenia zużycia uzwojenia, a w konsekwencji do pewnego obniżenia technicznych i ekonomicznych osiągów silnika.
Silniki wielobiegowe są przeznaczone do różnych trybów pracy. Najczęściej stosowane tryby ze stałym momentem obrotowym i stałą mocą. Regulacja częstotliwości obrotu ze stałym momentem obrotowym jest zapewniona, gdy uzwojenie przełącza się z układu gwiazdy na układ podwójny gwiazdowy (rys. 4.31).
Przy takim przełączniku prąd pobierany z sieci wzrasta dwukrotnie, aw konsekwencji moc silnika, moment się nie zmienia.
Poślizg silnika indukcyjnego można zmieniać na różne sposoby: zmieniając napięcie przyłożone do stojana, wprowadzając opór do obwodu wirnika lub wprowadzając dodatkowy emf do obwodu wirnika.
Kiedy zmienia się napięcie stojana, zmienia się charakterystyka mechaniczna silnika, jak pokazano na rys. 4,33. Spadek naprężeń prowadzi do zmniejszenia sztywności charakterystyki mechanicznej i zwiększenia poślizgu. W tym samym czasie prędkość wirnika maleje,
.
Regulacja prędkości w ten sposób jest możliwa w ograniczonym zakresie zmian poślizgu.
.
Główną wadą tego sposobu sterowania prędkością obrotową jest niska wydajność ze względu na wzrost strat w uzwojeniu wirnika proporcjonalnie do częstotliwości poślizgu
.
 |
Dlatego dotyczy tylko silników o małej mocy pracujących w automatycznych układach sterowania.
W silnikach z wirnikiem fazowym prędkość obrotową można zmienić zmieniając opór w wirniku (Rys. 4.34).
Zaletą tej metody kontroli częstotliwości jest to, że maksymalny moment obrotowy pozostaje niezmieniony. Ważne jest również, aby zauważyć, że część strat silnika jest przeprowadzana w rezystorze, co ułatwia tryb cieplny silnika. Reszta metody jest podobna do poprzedniej i charakteryzuje się niską sprawnością, małym zakresem sterowania w zależności od obciążenia i "miękką" charakterystyką mechaniczną.
Aby zwiększyć wydajność silnika przy dostosowywaniu prędkości obrotowej poprzez zmianę poślizgu, konieczne jest użycie mocy poślizgu, aby wykonać użyteczną pracę lub zwrócić ją do sieci. Schematy, które realizują ten pomysł, są nazywane kaskadowy. Jednym z typowych obwodów tego typu jest układ kaskadowy asynchronicznego zaworu (Rys. 4.35).
Schemat obejmuje silnik asynchroniczny z wirnikiem fazowym (BP), prostownik diodowy (D), dławik wygładzający (DR), falownik tyrystorowy (I) i transformator dopasowujący sieć (Tr). Regulacja prędkości odbywa się poprzez zmianę napięcia falownika. Prowadzi to do odpowiedniej zmiany napięcia uzwojenia wirnika, a tym samym do częstotliwości obrotu wirnika. Moc częstotliwości poślizgu pobieranej z uzwojenia wirnika silnika jest przekazywana do sieci przez dopasowany transformator.
Zaletą kaskadowych obwodów sterujących dla prędkości obrotowej silników asynchronicznych w porównaniu z obwodami sterowania częstotliwościami w obwodzie stojana (Rys. 4.28) jest to, że konwerter półprzewodnikowy jest wykonywany na mocy poślizgu, a nie na pełnej mocy silnika. Ta okoliczność jest szczególnie ważna dla napędów dużej mocy i super mocy pomp, pras, przenośników, mechanizmów podnoszących itp., Gdzie wymagany jest ograniczony zakres regulacji prędkości obrotowej (2: 1 i mniej).
Asynchroniczna kaskada zaworu z niezarządzanym prostownikiem umożliwia regulację tylko w dół od prędkości synchronicznej. Jeśli używasz kontrolowanego prostownika, możesz dostosować prędkość z synchronicznego. W takim przypadku kierunek przenoszenia mocy poślizgu jest odwrócony.