Regulator - urządzenie, które monitoruje działanie obiektu kontrolnego i generuje dla niego sygnały sterujące (regulacyjne).
Regulatory mogą być wykonane jako oddzielne urządzenie lub jako pakiet aplikacji w głównym programie urządzenia sterującego.
Kontrolery można podzielić na:
1. do wykorzystania na energię zewnętrzną:
regulatory bezpośredniego działania, nie wykorzystują energii zewnętrznej. Pracują kosztem energii wytwarzanej przez czujnik, są proste w budowie, nie drogie, ale nie mają wysokiej dokładności. Używany w najprostszych systemach sterowania.
regulatory nie są bezpośrednią akcją, wykorzystują energię zewnętrzną, ponieważ ich praca jest głównym typem regulatorów.
2. w związku z wykorzystywaną energią zewnętrzną:
3. w postaci regulowanego parametru: temperatura, ciśnienie, poziom, przepływ itp.
4. Zgodnie z prawem regulacji, tj. o zmianie regulującego wpływu w czasie przy zmianie regulowanego parametru (poprzez postać charakterystyki przejściowej regulatora). Te regulatory mogą być typu sprzętowego (analogowego) i cyfrowego, w postaci pakietu oprogramowania.
Wyróżnia się następujące rodzaje regulacji:
Właściwości i typy regulatora
1. P regulatorproporcjonalny regulator.
Funkcja transferu kontrolera P: Gp (s) = Kp. Regulator generuje akcję kontrolną na obiekcie proporcjonalnie do wielkości błędu (im większy błąd e, tym większe działanie kontrolne Y = Kp * e).
2. I-controllerregulator całkujący.
Funkcja przesyłania kontrolera I: Gi (s) = 1 / Ti * s. Działanie kontrolne jest proporcjonalne do całki błędu e:
3.
D-regulatorregulator różnicujący.
Funkcja transferuD-regulator: G d(
s) =
T d *
s. D regulator tworzy akcję kontrolną tylko wtedy, gdy zmienna sterująca została zmieniona:Y=
T d *
de/
dt.
Miej P-regulator , jest również nazywany statycznym, zmiana położenia RO jest proporcjonalna do odchylenia kontrolowanego parametru " e"Od podanej wartościX 0.
Korzyści P-regulator - jego prędkość (mała regulacja czasutp ) i wysoka stabilność procesu regulacyjnego.
Wada - błąd statyczny δ
X, tj. po zakończeniu procesu regulacyjnego (podczas regulacjit p) parametr nie zwraca dokładnie określonej wartości, ale różni się od podanej wartości δ
X, co zmniejsza dokładność regulacji. Wraz ze wzrostem wzmocnienia Kp, wielkość δ
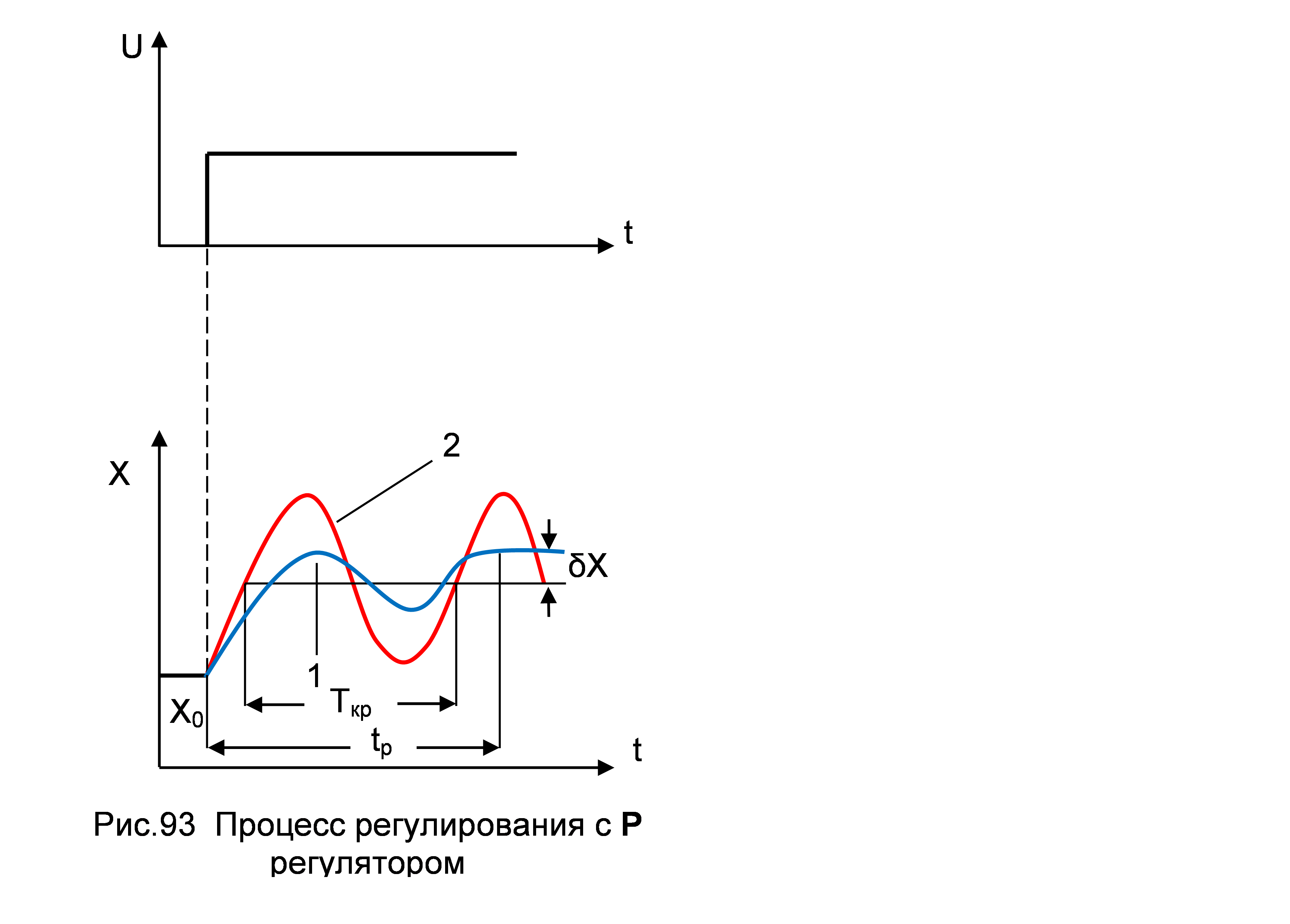
Humory, ale ASR może stracić stabilność. W systemie CR = Кр кр w układzie występują oscylacje bez tłumienia o stałej amplitudzie, a dla jeszcze większych wartości współczynnika K, ze wzrostem amplitudy. Ryc. 93
1 –
regulowany proces za pomocąPregulator z K p<
K p
.кр
2 - Regulowany proces, gdyK p = K r.kr
T cr - okres niezakłóconej oscylacji przyK p = K r.kr
t p - czas regulacji dla zrównoważonego procesu
X 0 - wartość początkowa regulowanego parametru
δ X - błąd statyczny
Miej Ja-regulator jest również nazywanya statyczne, zmiana położenia RO jest proporcjonalna do całki odchylenia " e"Regulowany parametr od jego wartości zadanej X 0 . Regulator będzie się poruszał, aż parametr osiągnie dokładnie ustawioną wartość, tj. nie ma błędu statycznego δ X = 0. To jest jego godność, ale wadą jest jej słaba stabilność, wspaniały czas regulacji. Może być stosowany na samopoziomujących się obiektach bezwładnościowych.

Miej D -Regulatorefekt regulacji jest proporcjonalny do prędkości odchylenia parametru od zadania, tj. pochodna odchylenia« e». Rysunek 94 ze zmianą krokuU (t), pojawia się sygnał błędu eco zmniejszy proces regulacyjnyt dopóki parametr nie osiągnie nowej wartościU (t) .t 0 - początek odchylenia parametru,t 1- moment zadziałania regulatora bez sygnału pochodnego; "Δ" to strefa niewrażliwości regulatora.
Współczynnik odchyleń w początkowym momencie jest duży i dlatego sygnał prędkości będzie duży, kontroler natychmiast wejdzie w życie t1 , nawet przed zauważalnym odchyleniem "Δ" parametru, a parametr będzie szybciej ustawiony na zadanie U (t).
Tak więc ten regulator ma zwiększoną prędkość - to jest jego godność.Wada - nietrwałe w pracy, nie używane osobno przez poetę. Ale ta zasada służy poprawie jakości regulacji.PDi PIDregulatory.
Łącząc najprostszyP, I, D , regulatory, zdobądźPI, PD, PIDregulatory. W praktyce głównie używane R, PI, PIDregulatory
PI - regulator, kombinacja RiJaregulatory. Ma zalety obu. Od R -dobra stabilność odJaδ X = 0.
PD- regulator, kombinacja Ri Dregulatory.Ma zalety obu. Od R -dobra tolerancja odD– poprawiona wydajność, ale błąd statyczny utrzymuje sięδ X jak u Rregulator.
PID- regulator, kombinacja P, I i Dregulatory.Ma zaletytrzy R -dobra tolerancja odJa- brak błędu statycznegoδ X = 0, od D– zwiększona prędkość.
PID- regulator według swoich możliwości jest najbardziej uniwersalny.Obecnie głównie w wersji elektronicznej i cyfrowejPID -Regulatorzy, na podstawiez czego różne przepisy prawne mogą zostać wdrożone.
Schemat strukturalny PIDregulator
Ryc. 95 pokazuje schemat blokowyRegulator PID
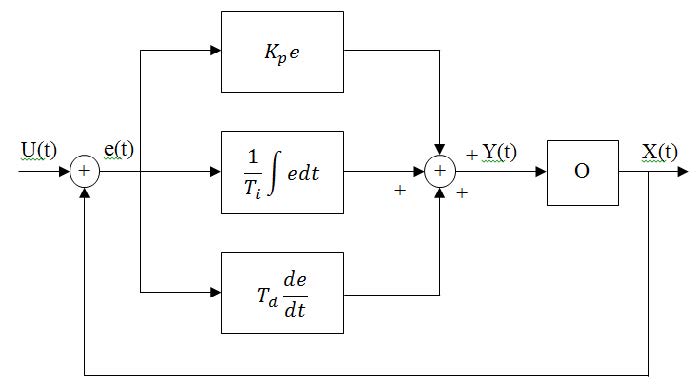
Ryc. 95 Wykres regulatora PID
K p- wzmocnienie regulatora
T i- stała integracja
T d- ciągłe różnicowanie
Są to parametry strojenia regulatorów.
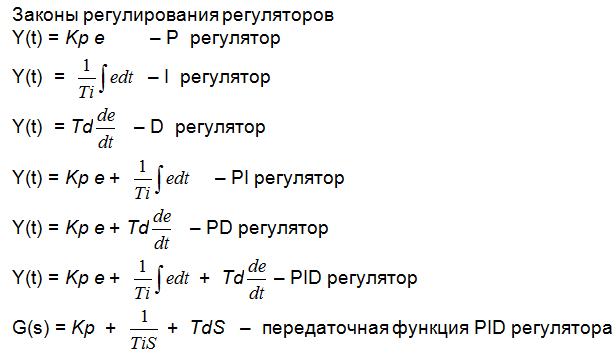
Przejściowa charakterystyka regulatorów pokazano na ryc. 96. DlaP, Ii Dregulatory są podobne do charakterystyk odpowiednich standardowych jednostek. W przypadku pozostałych regulatorów charakterystyki uzyskuje się poprzez dodanie charakterystykiRegulatory P, I i D.
Przejściowe charakterystyki pokazują, w jaki sposób zmienia się regulacyjny wpływ regulatoraY w czasie, gdy regulowany parametr odchyla się X z pracy i kiedy sygnał błędu "e".
Gdy odchylenie obniża temperaturę w obiekcie(X) y Rregulator, zawór sterujący otwiera się nieznacznie(Y) proporcjonalny do odchylenia temperatury i zatrzymania. Zapotrzebowanie na ciepło wzrośnie i temperatura, odzyskać szybko, ale nie do końca, wystąpi błąd statyczny δ X.
Miej PIDregulator, z powodu R iD komponentów, zawór najpierw otwiera się silnie, zapewniając szybkie dostarczanie ciepła, ale potem, aby nie nastąpiło przegrzanie, zaczyna się pokrywać, dostarczając niezbędnego ciepła do obiektu. Wtedy zaczyna działaćJa składnik który otwiera zawór aż do usunięcia błędu statycznego δ X. Tak więcDskładnik zwiększa prędkość regulatora, i Jaskładnik usuwa błąd statyczny δ X.
Pytania testowe
1. Jeśli masz R regulator kr wzrost, a następnie jak się zmieni δ X?
2. Co daje Jaskładnik regulatora?
3. Na której nieruchomościi jak to działa Dskładnik regulatora?
4. Który regulator jakości jest najgorszy i najlepszy?
Regulatory obwodów elektrycznych
Na ryc. 97 pokazuje możliwe przykłady wykonania regulatorów na wzmacniaczach operacyjnych. R regulator jest wdrażanyDA1.
Współczynnik zysku R składnik Cr = Rp / R1. Na schemacie PID regulator na DA1 repeater R składnik, ponieważ K =R / R = 1 i funkcje wzmacniacza DA 4, który jest równocześnie urządzeniem porównującymktóry oe porównuje sygnał z setera+ U z sygnałem z czujnika -Ux Ich różnica e = U- Ux serwowane przy wejściuDA. Zarejestruj się ezależy od kierunku zmiany parametru. Ustawienia dlaJaczęści T i= RiDziękiii dla D części Td = RdCd. Na DA5 Tworzony jest sumator, który podsumowuje wszystkie komponenty i na wyjściu otrzymujemy sygnał zmieniający sięPIDdo prawa.
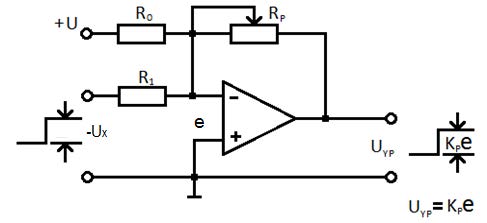
P regulator
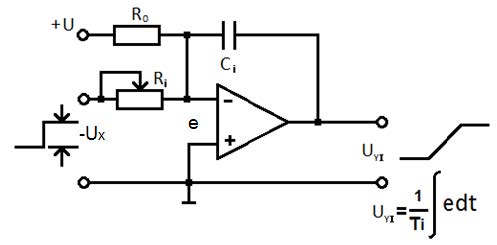
I regulator

D regulator
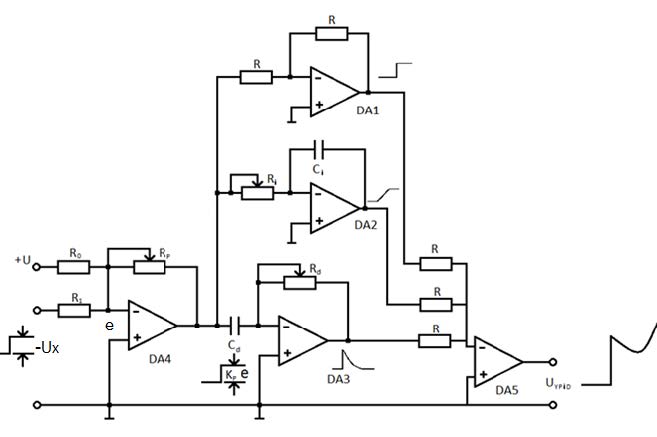
Kontroler PID
Ryc. 97 Układy elektryczneKontrolki P, I, D i PID
Elektroniczne prawo regulacyjne Tja,Td.

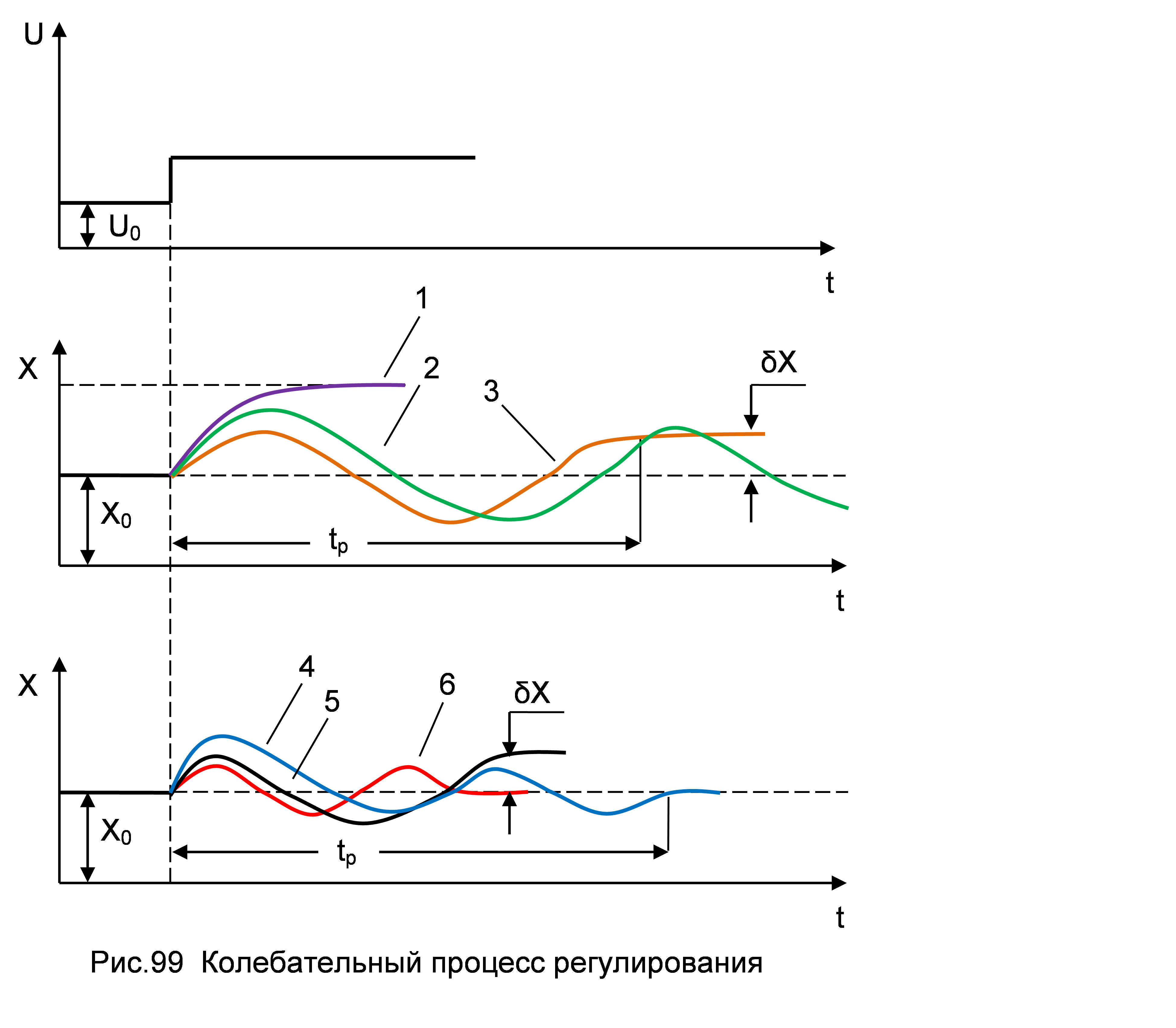
1 - bez regulatora
2 – Jaregulator
3 – Pregulator
4 – PIregulator
5 – PDregulator
6 – PIDregulator
X 0 - wartość początkowa regulowanego parametru
δ x - błąd statyczny
Przy innych wartościach równych, proporcjonalne-całkujące-różnicowe lub PID (PID - proporcjonalne-całkujące-pochodne) regulatory pozwalają zwiększyć dokładność sterowania o 5-100 razy w porównaniu z pozycjonerem.
Najczęściej w zadaniach systemu sterowania przemysłowego stosuje się regulację dwupozycyjną i regulację PID.
Dwustopniowa regulacja włącza się lub wyłącza siłownik (na przykład nagrzewnica), w zależności od tego, czy zmierzony parametr jest niższy, czy wyższy w stosunku do ustawionego poziomu. Przy regulacji typu on-off system zawsze zawiera wahania parametrów technologicznych, a zakres tych fluktuacji określają tylko parametry systemu (bezwładność czujników, siłownika i samego układu) i jest praktycznie niezależny od regulatora.
Przy regulacji PID sygnał sterujący zależy od różnicy mierzonego parametru i określonej wartości, od całki, od różnicy i od szybkości zmian parametrów. W rezultacie regulator PID zapewnia stan siłownika (pośredniego między włączaniem i wyłączaniem), przy którym mierzony parametr jest równy podanemu. Gdy stan siłownika jest ustabilizowany, dokładność utrzymywania parametru w systemie wzrasta dziesięciokrotnie. Tak więc prawo regulacji zapewnia dokładność.
Zasadniczo dokładność utrzymania będzie określona przez dokładność pomiaru sygnału i intensywność zewnętrznych wpływów na obiekt.
Pb - początkowa temperatura w systemie
ti jest stałą czasową całkowania
td - stała czasu różnicowania
Sygnał sterujący regulatora PID jest definiowany przez trzy komponenty:

(P - element proporcjonalny)
Sygnał sterujący, który wytwarza regulator, zależy od tego, jak duże jest niedopasowanie (komponent proporcjonalny), jak długo utrzymuje się niedopasowanie (składnik całkowity), a na końcu, jak szybko zmienia się niedopasowanie (komponent różnicowy).
Jakość sterowania regulatorem PID w dużej mierze zależy od tego, jak dobrze wybrane parametry kontrolera odpowiadają właściwościom systemu. Oznacza to, że sterownik PID musi być skonfigurowany przed uruchomieniem.
Jakość regulacji regulatora PID zależy od dokładności ustawienia jego parametrów. Istnieje wiele różnych metod dostrajania kontrolerów PID. Większość z nich opiera się na analizie odpowiedzi przejściowej.
Krok 1. Ustaw proporcjonalną składową regulatora PID
Przed regulacją zakresu proporcjonalności komponenty całkowe i różnicowe są wyłączone lub stała całkowania ustawiona jest na maksimum możliwe, a stała różniczkowania jest ustawiona na minimum. Wymagane ustawienie jest ustawione na SP. Zakres proporcjonalności jest ustawiony na 0 (minimum możliwe). W tym przypadku regulator pełni funkcję regulatora dwupozycyjnego. Rejestrowana jest odpowiedź przejściowa.
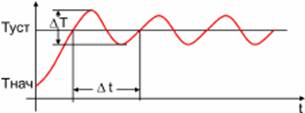
Tnach - początkowa temperatura w systemie
Tust - ustawiona temperatura (wartość zadana)
Δ T to zakres wahań temperatury
Δ t to okres wahań temperatury
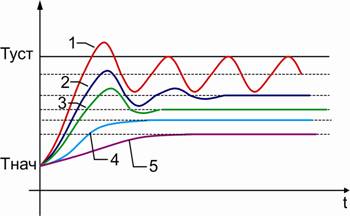
Ustaw zakres proporcjonalności równy zakresowi fluktuacji temperatury: Pb = Δ T. Ta wartość służy jako pierwsze przybliżenie zakresu proporcjonalności. Konieczne jest ponowne przeanalizowanie właściwości przejściowych i, jeśli to konieczne, skorygowanie wartości zakresu proporcjonalności. Możliwe warianty charakterystyki przejściowej pokazano na ryc.
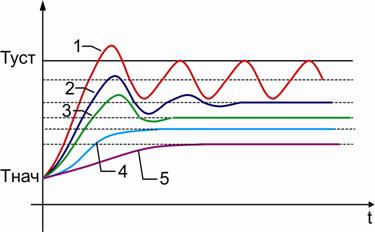
Odpowiedź przejściowa typu 1
Wartość zakresu proporcjonalności jest nadal bardzo mała, odpowiedź przejściowa (a zatem regulacja regulatora) jest daleka od optymalnej. Zakres proporcjonalności powinien zostać znacznie zwiększony.
W odpowiedzi przejściowej obserwuje się oscylacje tłumione (5-6 okresów). Jeśli w przyszłości zamierza się używać komponentu różnicowego regulatora PID, to wybrana wartość zakresu proporcjonalności jest optymalna. W tym przypadku ustawienie pasma proporcjonalnego uznaje się za zakończone.
Jeśli w przyszłości komponenty różnicowe nie będą używane, zaleca się dalsze zwiększenie zakresu proporcjonalności, aby uzyskać charakterystykę przejściową typu 3 lub 4.
W odpowiedzi przejściowej występuje niewielkie przeregulowanie i gwałtownie rozpadające się oscylacje (1-2 okresy). Ten rodzaj przejściowej odpowiedzi zapewnia dobrą prędkość i szybki dostęp do ustawionej temperatury. W większości przypadków można go uznać za optymalny, jeżeli w systemie przełącza się z jednej temperatury na inną (przegrzanie).
Emisje są eliminowane przez dodatkowe zwiększenie zakresu proporcjonalności, tak aby uzyskać odpowiedź przejściową typu 4.
Temperatura płynnie zbliża się do wartości ustalonej bez emisji i wahań. Ten rodzaj przejściowej reakcji można również uznać za optymalny, jednak prędkość regulatora jest nieco zmniejszona.
Transientowa odpowiedź typu 5
Silnie opóźnione podejście do ustalonej wartości wskazuje, że zakres proporcjonalności jest nadmiernie duży. Dokładność regulacji dynamicznej i statycznej jest tutaj niewielka.
Należy zwrócić uwagę na dwie okoliczności. Po pierwsze, we wszystkich przypadkach uwzględnionych powyżej, stała wartość temperatury w układzie nie pokrywa się z wartością zadaną. Im większe pasmo proporcjonalności, tym większe niedopasowanie resztkowe. Po drugie, czas trwania stanów nieustalonych jest większy, tym większa jest strefa proporcjonalności. Dlatego należy dążyć do jak najmniejszego wyboru zakresu proporcjonalności. Jednocześnie, integralny komponent regulatora usuwa resztkową charakterystykę niedopasowania czysto proporcjonalnych regulatorów (regulatorów P).
Krok 2. Skonfiguruj komponent różnicowy (td) regulatora PID
Ten etap jest obecny tylko wtedy, gdy używany jest w pełni funkcjonalny kontroler PID. Jeśli komponent różnicowy nie będzie używany (używany jest regulator proporcjonalnej integralności (PI)), przejdź od razu do kroku 3 (Ustawianie integralnego składnika ti).
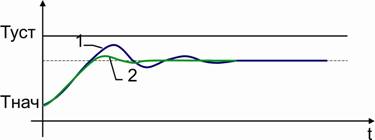
Na etapie regulacji zakresu proporcjonalności ustalane jest pasmo proporcjonalne, odpowiadające charakterystyce przejściowej typu 2, w której występują oscylacje tłumione (patrz rys. 1, krzywa 2, rys. 3, krzywa 1). Konieczne jest ustawienie stałej czasowej różniczkowania, aby charakterystyka przejściowa miała postać krzywej 2 na Rys.2. W pierwszym przybliżeniu stała czasowa różnicowania jest równa td = 0,2Δt.
Warto zauważyć, że komponent różnicowy eliminuje oscylacje tłumione i sprawia, że odpowiedź przejściowa jest podobna do typu 3 (patrz: rys. 1). W tym przypadku zakres proporcjonalności jest mniejszy niż w przypadku typu 3. Oznacza to, że dokładność kontroli dynamicznej i statycznej w obecności komponentu różnicowego (kontrolera PD) może być wyższa niż w przypadku regulatora P.
Krok 3. Skonfiguruj integralny komponent (ti) regulatora PID
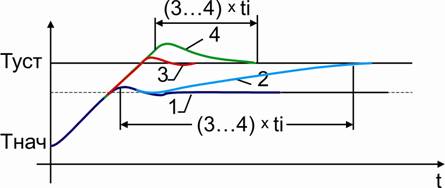
Po wyregulowaniu proporcjonalnego komponentu (i, jeśli to konieczne, komponentu różnicowego), charakterystyka przejścia jest pokazana, jak pokazano na Fig. 1, krzywa 1. Integralny komponent jest zaprojektowany do usuwania resztkowego niedopasowania między wartością temperatury ustawioną w układzie i wartością zadaną. Początkowa regulacja stałej czasowej całkowania powinna być równa wartości Δt.
Transientowa odpowiedź typu 2
Okazuje się, że zbyt duża wartość stałej czasowej całkowania. Wydajność do wartości zadanej jest bardzo długa i trwa około (3 ... 4) ti.
Transientowa odpowiedź typu 4
Okazuje się, że stała czasowa integracji jest za mała. Wyjście do wartości zadanej trwa również (3 ... 4) ti. Jeśli stała czasowa całkowania jest dalej zmniejszana, w systemie mogą wystąpić oscylacje.
Transientowa odpowiedź typu 3
Optimum.
Wynik
W związku z tym dokonaliśmy przeglądu procesu stopniowego dostrajania różnych komponentów sterownika PID. Na każdym etapie monitorowano typ odpowiedzi przejściowej i, w razie potrzeby, poprawiano wartości parametrów regulatora PID. W tym przypadku początkowe wartości parametrów były parametrami odpowiedzi przejściowej otrzymanej dla kontrolera dwupozycyjnego, a mianowicie: Pb = ΔT; ti = At; td = 0,2Δt. Doświadczenie pokazuje, że w większości przypadków te wartości parametrów zapewniają ustawienie regulatora PID zbliżone do optymalnego i nie jest wymagana żadna dalsza korekta parametrów.
Sterownik PID jest urządzeniem sterującym. proces technologicznyktóra jest używana w metodzie sterowania PID w oparciu o trzy prawa regulacji: proporcjonalną, całkowitą i różnicową.
Zintegrowane miechy i zmienne ograniczniki umożliwiają integralną regulację. Dwa mieszki różnicowe i inne ograniczenie zmienne umożliwiają sterownikowi sterowanie różnicowe.
Jeżeli wydajność wzrasta, wówczas mieszki wejściowe i dolny mieszek różnicowy rozszerzają się. Górny mieszek różnicowy rozszerza się później ze względu na zmienne ograniczenie. Pasek równowagi obraca się, a wynik natychmiast się podnosi.
Kiedy sygnał wejściowy wpada całkowicie do górnego mieszku różnicowego, mieszek ten zastosuje siłę, która zniszczy siłę wywieraną przez dolny mieszek różnicowy. W tym momencie regulacja różnicowa zatrzymuje się. W tym samym czasie, sprzężenie zwrotne rozszerza się w wyniku zmiany wydajności. Zmiana mocy wyjściowej jest stosowana do całkowego mieszka, co powoduje siłę, która ma tendencję do utrzymywania zaworu bliżej dyszy. Ta akcja utrzymuje wysoki wynik na czas, gdy zmienna procesowa nie jest równa wartości zadanej. Wyjście będzie kontynuowane do momentu, aż zmienna procesowa powróci do określonej wartości zadanej.
Regulator PID będzie dobrym wyborem dla podgrzewacza gazu opalanego gazem, ponieważ następujący po nim proces, w którym podgrzewany olej pozwala tylko na bardzo małe odchylenia temperatury oleju od wartości zadanej, a duże opóźnienia w procesie ogrzewania powodują, że bardzo trudno jest zidentyfikować i wyeliminować odchylenia. .
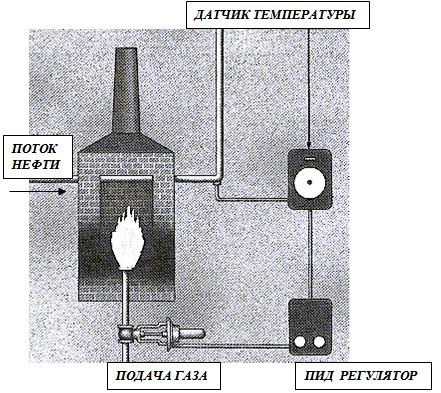
Jednym z powodów opóźnienia - pojemność. Piec ma zdolność zatrzymywania dużej ilości ciepła wewnątrz ścian. Nagromadzone ciepło przenosi się do oleju, ale transfer nie następuje natychmiast. Jeśli ściany wewnętrzne zostaną nagrzane zbyt mocno, zajmie to trochę czasu, aby obniżyć ich temperaturę, podczas której olej może się przegrzać. Jeśli ściany wewnętrzne nie są wystarczająco nagrzane, olej może nie uzyskać wystarczającej ilości ciepła.
Różnicowy składnik kontrolera PID pomaga przezwyciężyć opóźnienia poprzez opracowanie skutecznych działań zapobiegawczych. Komponent całkujący w sposób ciągły koryguje sygnał wyjściowy, gdy występuje przesunięcie, aż temperatura kontrolowana powróci do wartości zadanej.