Deyarli barcha mashinalar elektr haydovchi sifatida asinxron motorlar bilan jihozlangan. Ular oddiy dizayni va yuqori narx emas. Shu jihatdan asinxron vosita tezligini nazorat qilish muhim ahamiyatga ega. Biroq, standart kommutatsiya devorida uning inqiloblari faqat mexanik uzatish tizimlari (tishli qutilar, kasnaklar) yordamida boshqarilishi mumkin, bu har doim ham qulay emas. Rotor tezligining elektr boshqaruvi ko'proq afzalliklarga ega, biroq indüksiyon motorining simi diagrammasi murakkablashadi.
Avtomatik uskunaning ayrim qismlariga nisbatan asenkron elektr mexanizmi shaftining aylanish tezligini elektrni boshqarish mos keladi. Bu ish rejimlarini silliq va aniq sozlashning yagona yo'li. Chastotani, kuchlanishni va oqim shaklini o'zgartirish orqali aylanish tezligini boshqarishning bir necha yo'li mavjud. Ular diagrammada ko'rsatilgan.
Rasmda keltirilgan usullardan rotor tezligini tartibga solish uchun eng keng tarqalgan usuli quyidagi parametrlarning o'zgarishi hisoblanadi:
Oxirgi ikki usul, sizda rentabellik va kuch yo'qotishining sezilarli pasayishi holda aylanish tezligini o'zgartirish imkonini beradi, boshqa sozlash usullari slip miqdoriga mutanosib ravishda samaradorlikni pasaytirishga yordam beradi. Ammo bu va boshqalar o'zlarining afzalliklari va kamchiliklariga ega. Ishlab chiqarishda ko'pincha asinxron motorlar ishlab chiqarilgandan so'ng, bu turdagi elektr motorlariga tegishli bo'ladi.
Uchun chastota regulyatsiyasi asosan yarimo'tkazgich konvertorlari ishlatilgan. Ularning ishlash printsipi stator magnit maydonining aylanish chastotasi besleme zo'riqishida chastotasiga bog'liq bo'lgan asinxron motorning o'ziga xos xususiyatlariga asoslanadi. Stator maydonining aylanish tezligi quyidagi formula bilan belgilanadi:
n1 = 60f / p, bu erda n1 dala aylanish chastotasi (rpm), ta'minot tarmog'ining (Hz) f-chastotasi, p stator qutblarining juftligi soni, 60 o'lchovni qayta hisoblash koeffitsienti.
Asynxli vositani yo'qotishsiz samarali ishlashi uchun etkazib berilgan kuchlanishni chastotali bilan almashtirish kerak. Zo'riqish yuk momentiga qarab o'zgarishi kerak. Agar yuk barqaror bo'lsa, kuchlanish chastotaga mutanosib ravishda o'zgaradi.
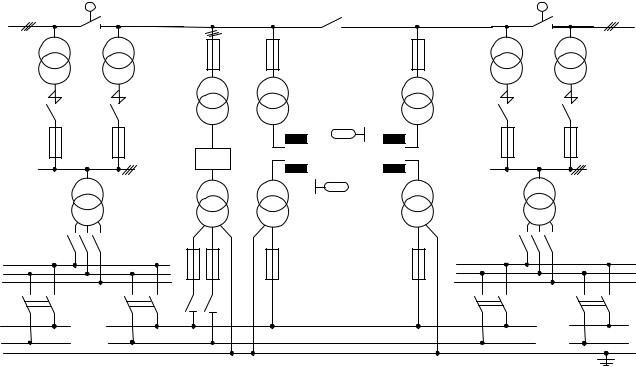
Zamonaviy chastota regulyatorlari sizni keng doiradagi tezlikni kamaytirishga va oshirishga imkon beradi. Bu esa, ularni nazorat ostida ushlash bilan jihozda, misol uchun, payvandlash tarmoqlarining ko'p kontaktli mashinalarida keng qo'llanilishini ta'minladi. Ularda sariq milni boshqaradigan asenkron motorning aylanish tezligi yarim o'tkazgich konverteri bilan tartibga solinadi. Ushbu sozlama operatorni sozlashda texnologik operatsiyalarning to'g'riligini kuzatish, mashinani sozlashda bosqichma-bosqich tezlashtirish yoki to'xtatish uchun imkon beradi.
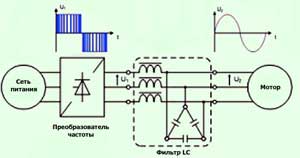
Chastotani konvertaciya ishlash tamoyiliga batafsil to'xtalib o'tamiz. Ikki marta konvertatsiya qilish tamoyiliga asoslanadi. Regulyator rektifikator, impuls invertori va nazorat qilish tizimidan iborat. Tekshirgichda sinusoidal kuchlanish turg'un voltajga aylanadi va inverterga yuboriladi. Uch fazali kuchlanish inverterining kuchi olti transistorli kalitlarga ega. Ushbu avtomatik tugmachalar yordamida stator sariqlariga doimo voltaj qo'llaniladi, shuning uchun to'g'ridan-to'g'ri, to'g'ridan-to'g'ri shamol va 120 ° gacha bo'lgan o'zgarishlar oqimi bilan bog'liq sariqlarga kelishi kerak. Shunday qilib, doimiy kuchlanish istalgan amplituda va chastotaning o'zgaruvchan uch fazali kuchlanishiga aylantiriladi.
Kerakli parametrlar boshqaruv moduli orqali o'rnatiladi. Kalitlarning ishlashini avtomat tarzda sozlash pulse-width modulatsiyasi tamoyiliga muvofiq amalga oshiriladi. Quvvat kalitlari kuchli IGBT tranzistorlarini ishlatadi. Ular tiristorlar bilan taqqoslaganda, yuqori chastotali chastotaga ega va sinusoidal oqimni minimal distorsiyadan hosil qiladi. Bunday qurilmalarning amaliyligiga qaramasdan, ularning o'rtacha va yuqori quvvatli dvigatellari uchun sarf-xarajatlari juda yuqori.
 Asenkron vosita usulining aylanish tezligini sozlash polen juftlarining sonidagi o'zgarishlar shuningdek, sincap qafasidagi elektr motorlari uchun eng keng tarqalgan usullarni qo'llaydi. Bunday motorlar ko'p tezlikli deb nomlanadi. Ushbu usulni qo'llashning ikki yo'li mavjud:
Asenkron vosita usulining aylanish tezligini sozlash polen juftlarining sonidagi o'zgarishlar shuningdek, sincap qafasidagi elektr motorlari uchun eng keng tarqalgan usullarni qo'llaydi. Bunday motorlar ko'p tezlikli deb nomlanadi. Ushbu usulni qo'llashning ikki yo'li mavjud:
Birinchi holatda, oluklarga qo'shimcha sariqlarni qo'yish uchun simning kesishishini kamaytirish kerak, va bu elektr motorining nominal kuchini pasayishiga olib keladi. Ikkinchi holatda, ayniqsa, uch va undan ko'p tezliklarda, shuningdek, yomonlashib borayotgan energiya ko'rsatkichlari uchun uskunani almashtirishning murakkabligi bor. Keyinchalik batafsilroq, bu va boshqa asinxron vosita tezligini nazorat qilishning boshqa usullari arxiv faylida tasvirlangan va sahifaning past qismida yuklab olish mumkin.
Odatda, ko'p tezlikli motorlar 2, 3 yoki 4 aylanish tezligida ishlab chiqariladi, 2-tezlikli motorlar stator ustidagi bitta sariq bilan ishlab chiqariladi va ikkita sariq holda 2: 1 = p2: pt, 3 tezkor motorlardagi qutb juftlarining sonini almashadi. Statorda 2: 1 switch = Pr: Pi, 4-tezlikdagi motorlar - statordagi ikkita sariq bilan amalga oshiriladi, ularning har biri 2: 1 nisbatidagi qutb juftliklarining sonini o'zgartiradi. Ko'p tezlikli elektr motorlar turli xil mashinalari, yuk va yo'lovchi liftlari bilan jihozlangan, ular fanatlar, nasoslar va boshqalarni ishlatish uchun ishlatiladi.
Asenkron elektr motorlarining muhim kamchiliklari ularning aylanish chastotasining nisbatan murakkab regulyatsiyasi.
Asenkron elektr motorlarining aylanish tezligini boshqarishning mumkin bo'lgan usullari vosita rotor tezligi uchun qayd etilgan ifodani tahlil qilish yo'li bilan o'rnatilishi mumkin: n 2 = 60f 1 (1 ‑b)/s. Formuladan tahlil qilish shuni ko'rsatadiki, indüksiyon vosita aylanish tezligi rotorun kaymasını o'zgartirib o'zgartirilishi mumkin bqutb juftligi soni svosita yoki chastota f 1 besleme zo'riqishida.
Stator sarg'ishchasiga tatbiq etilgan kuchlanishning o'zgarishi yoki rotor pallasida faol qarshilikni o'zgartirish orqali chastota o'zgarishini chastota nazorat qilish mumkin.
Faol qarshilik o'zgarishi bilan chastotani nazorat qilishfaqatgina faza rotoriga ega bo'lgan asenkron motorlar uchun sariqlikda (slip uzuklari orqali) dvigatelni ishga tushirish bilan bir xil tarzda qo'shimcha sozlash qarshiligi yoqilgan bo'lishi mumkin. Biroq, dastlabki qarshilik tezlikni nazorat qilish uchun mos emas, chunki u uzluksiz ishlash uchun mo'ljallanmagan. Qarshilikni qarshilik uzoq vaqt davomida boshlanishi bilan solishtiradigan oqimlarga bardoshli bo'lishi kerak.
Rotor pervazining faol qarshiligi, vosita rotorining kritik kaymasının qiymati bilan b yuqoridagi formulaga muvofiq oshiriladi.
Turli xil qo'shimcha qarshiliklarni o'z ichiga olgan holda, vosita mexanik xususiyatlarining oilasini olish mumkin, masalan. Rotor devirida vosita chizig'ida doimiy yuk moment bilan faol qarshiligining ortishi bilan operatsion nuqtasi yangi mexanik xususiyatdan boshqasiga o'tib, yangi, chidamli qarshilikka mos keladi. Rotorning slipida va shuning uchun indüksiyon motorining rotorining aylanish chastotasining pasayishi bor. Ushbu usul bilan regulyatsiya keng slaydda bo'lishi mumkin, ammo chastotani kamaytirish bilan mexanik xarakteristikaning qattiqligi buziladi va elektr yo'qotish kuchayadi.
Besleme voltajini o'zgartirish orqali tezlikni nazorat qilishbu momentning kritik qiymatiga bog'liqligi sababli mumkin M k, va shuning uchun qiymati M(b) biron bir slipda besleme zo'riqishida kvadratiga mutanosib bo'ladi U 1 2. Shakl 12da ko'rsatilgan egri chiziqlar mexanik milya ustida doimiy yuk momenti bilan ishlaydigan nuqta yangi mexanik xususiyatdan boshqasiga o'tib, yangi, kam kuchlangan voltajga mos keladi U 1. Rotorning slipida va shuning uchun indüksiyon motorining rotorining aylanish chastotasining pasayishi bor. Ushbu usul bilan indüksiyon motorini tartibga solish, faqat muhim bir vaqt va rotor kaymasıyla cheklangan kichik kayma oralig'ida mumkin.
Ta'kidlash kerakki, kuchlanish kamayib ketganda, kuchlanish kvadratiga mutanosib, vosita kritik momentida keskin pasayish kuzatiladi va shuning uchun ta'riflangan usulning qo'llanilish doirasini cheklaydigan kritik Turkning ko'pligi jihatidan mexanizmning haddan tashqari yuklanish hajmining keskin pasayishi kuzatiladi.
Sincap kafesli rotorli asenkron motorning aylanish tezligini bosqichma-bosqich tartibga solish, polen juftlarining sonidagi o'zgarishlarjuda tezkor dvigatellarda ishlatiladigan sariq qismlarini almashtirishga bog'liq. Usulning mohiyati shundan iboratki, tarmoq chastotasining doimiy chastotasida indüksiyon motorining qaytish tezligi stator sargısının qutblari soniga bog'liq. Shunday qilib, agar mos kelmaydigan dvigatelning statoriga turli xil sonli ikki yoki ikkita alohida sariq o'rnatilgan bo'lsa, unda har bir sariq alohida tarmoqqa ulangan bo'lsa magnit maydonning va shuning uchun rotorning turli aylanish chastotalarini olish mumkin. Afsuski, bu iqtisodiy va nisbatan oddiy usul, vosita tezligini muammosiz tuzatishga imkon bermaydi. Sanoat elektr motorlarining seriyasini ishlab chiqdi, uning aylanish tezligi 2, 3 va 4 martali kuchlarni yo'qotmasdan tartibga solingan. Shuni ham ta'kidlash kerakki, juda tezkor elektr motorlarining dizayni bir martali elektr motoriga qaraganda ancha murakkab, bu ularning qadrlanishiga olib keladi.
Asenkron motorni aylanish tezligi ham sozlanishi mumkin. besleme oqimining chastotasini o'zgartirish, lekin bu usul yuqori kuchlanish davrlarida oqimning chastotasini tartibga soladigan oddiy va arzon narxlardagi qurilmalar etishmasligi tufayli kuchli dvigatellar uchun amalda foydalanilmaydi. Shu bilan birga, kuchli va arzon boshqariladigan yarimo'tkazgichli qurilmalar (diodlar, tiristorlar) ishlab chiqish va sanoatni rivojlantirish oddiy va ishonchli chastotali konvertorlar va past kuchlanishli kuch-konvertorlarni ishga tushirish imkonini beradi, bu bilan qisqa vaqtli rotorli asenkron elektr motorining aylanish tezligini osongina moslash mumkin, turli xil mexanizmlarning harakatlanishini soddalashtiradi, ko'pincha shinalar, transmissorlar, transmissiyalarga ehtiyoj yo'q.
Sahifa 17 ning 51
Asenkron motorlar zamonaviy AC apparati asosidir. Ushbu elektr haydovchi samaradorligi ko'pincha tezlikni tartibga solish imkoniyatlari bilan aniqlanadi.
Rotor tezligi nazorati jihatidan asinxron motorlarning salohiyati ifoda bilan aniqlanadi
.
Ushbu iboradan aylanish chastotasi uchta yo'l bilan o'rnatilishi mumkin: chastotani o'zgartirib, polietilen juftlar soni s va slip b. Ushbu usullarning har birini batafsilroq ko'rib chiqing.
Bu usul bugungi kunda eng umidli hisoblanadi. Chastotani o'zgartirish yarimo'tkazgich chastotasi konvertori yordamida amalga oshiriladi (4.2.2-rasm, a). Chastotani o'zgartirish bilan bir vaqtda magnit oqimni barqarorligini ta'minlash uchun kuchlanish ham tartibga solinadi. Stressni oqim bilan bog'liq ifodadan F,
,
bu kuchlanish chastotaga mutanosib ravishda sozlanishi kerak
![]() .
.
Ushbu qonundan chetga chiqish oqimning o'zgarishiga olib keladi F.bu noto'g'ri. Chindan ham, oqim oshgani sayin, magnit devorning to'yinganligi oshadi, po'latdagi yo'qotishlar va magnitlangan oqim oshadi. Oqimning kamayishi vosita maksimal momentini va boshqa bir qator nomaqbul hodisalarning pasayishiga olib keladi.
Bilan ![]() mexanizmning mexanik xususiyatlari quyidagicha ko'rinadi. 4.28, b turlari. Chastotani kamaytirganda, vositaning dastlabki momenti oshadi va maksimal darajada kamayadi. Dvigatelning ishchi qatlami kichik bo'lib qolmoqda, bu mexanik ishning iqtisodiy usulini belgilaydi. Biroq, mexanizmi aylanish tezligini nazorat qilishning ushbu uslubi juda yuqori, chunki chastota konvertori to'liq dvigatel kuchida bajarilishi kerak.
mexanizmning mexanik xususiyatlari quyidagicha ko'rinadi. 4.28, b turlari. Chastotani kamaytirganda, vositaning dastlabki momenti oshadi va maksimal darajada kamayadi. Dvigatelning ishchi qatlami kichik bo'lib qolmoqda, bu mexanik ishning iqtisodiy usulini belgilaydi. Biroq, mexanizmi aylanish tezligini nazorat qilishning ushbu uslubi juda yuqori, chunki chastota konvertori to'liq dvigatel kuchida bajarilishi kerak.
Ushbu tartibga solish usuli, oldingi holatdan farqli o'laroq, aylanish tezligini faqatgina bosqichlarda o'zgartirishga imkon beradi. U shamollatkich, konveyer, lift, elevator kabi mexanizmlarda qo'llaniladi. Ikkala qutbning juft sonli motorlari chaqiriladi juda tezligi. Odatda, ko'p tezlikli asenkron motorlar ikki, uch va to'rtta tezlikli qadamlar bilan amalga oshiriladi. Ikki tezlikli motorlar, bir qutbli holda ishlab chiqariladi, agar pole juftlarining soni quyidagi munosabatlarga mos keladigan bo'lsa:
.
Uchta va to'rtta tezlikli motorlar ikkita sariq bilan ishlaydi. Uchta tezlikda harakatlanadigan motorlarda pole juftlarini almashtirish bilan bitta sariqlik, to'rtta tezlikda harakatlanadigan motorlarda esa ikkita sariqlik ikkita tezlikda amalga oshiriladi. Ko'p tezlikli motorlarning rotori sariqligi qisqa tutashgan. Rotorni o'rashning kerakli sonli massasi stator maydonida avtomatik tarzda shakllantirilganligi sababli ulanish sxemasini almashtirishni talab qilmaydi.
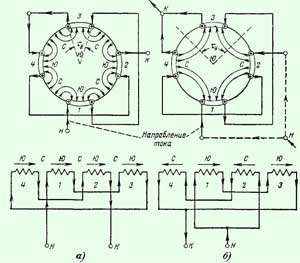
Qatorlarning sonidagi o'zgarish stator sariq qismlarining ulanish sxemasini o'zgartirish orqali amalga oshiriladi. Shakl. 4.29 ulanish birlashmalarining uch varianti ko'rsatilgan.
«A» variantida bo'linmalarning izchil qo'shilishiga to'g'ri keladi, bu holda qutbli magnit maydon hosil bo'ladi. "B" variantida ikkinchi bo'lim ketma-ketlikda yoqiladi. Olingan maydon qutblarga ega. Sarma quvvati o'zgarishsiz qolmoqda, ![]() va mexanizmi tomonidan ishlab chiqilgan vaqt ikki barobarga qisqardi,
va mexanizmi tomonidan ishlab chiqilgan vaqt ikki barobarga qisqardi, ![]() . "B" variantida ikkinchi qism parallelga qarshi rejimda yoqiladi. Olingan maydon shuningdek, qutblarga ega bo'ladi, lekin sarg'ishning kuchi
. "B" variantida ikkinchi qism parallelga qarshi rejimda yoqiladi. Olingan maydon shuningdek, qutblarga ega bo'ladi, lekin sarg'ishning kuchi ![]() ikkilamchi va vosita torku sobit turadi
ikkilamchi va vosita torku sobit turadi ![]() .
.
 |
Shunday qilib, qutb juftligini sonini o'zgartirish uchun sariqning har bir bosqichi ikkita bir xil qismdan iborat bo'lishi kerak. Ikkala qism ham bir xil yo'nalishdagi oqimlardan oqilsa, qutblar soni, ularning birida oqim yo'nalishi o'zgarganda, qutblar soni yarimga teng. Kutuplar sonini bir biridan ikkinchisiga almashtirishda, qutb bo'linishi yarim fazadan 60 ° dan 120 ° gacha o'zgarib turadi (4-rasm).
Har ikki tezlik uchun o'zgarishlar aylanishi bir xil bo'lishi kerak, zonalarda oqim yo'nalishini o'zgartirishdan tashqari, o'rashning ikki fazasini almashtirish kerak. Ko'proq qutbalar bilan sarg'ish diametrli maydonchada amalga oshiriladi. Undan keyin kamroq qutblar bilan.
Kichik bir qadam, sargının foydalanish va shuning uchun mexanizmi texnik va iqtisodiy ishlashi bir oz pasayishiga olib kelishi bilan yomonlashishiga olib keladi.
Ko'p tezlikli motorlar turli xil ish rejimlariga mo'ljallangan. Ruxsat etilgan torque va sobit quvvat bilan eng keng tarqalgan usullari. Burilish chastotasini doimiy moment bilan tartibga solish sariq yulduzdan ikkilamchi yulduz pallasiga ulanganda ta'minlanadi (4.31-rasm).
Bunday kalit bilan, tarmoqdan iste'mol qilinadigan oqim ikki barobar ortadi, va natijada, dvigatel kuchi, vaqt o'zgarmaydi.
Bir indüksiyon vosita slip turli yo'llar bilan o'zgartirilishi mumkin: rotor pallasida qarshilik yoki rotor pallasida qo'shimcha emf kiritib, statorga tatbiq voltaj o'zgartirib.
Stator voltaji o'zgarganda, mexanizmning mexanik xususiyati o'zgaradi. 4.33. Stressning pasayishi mexanik xarakteristikaning qattiqligida va slipning ko'tarilishiga olib keladi. Shu bilan birga, rotor tezligi pasayadi,
.
Ushbu usulda tezlikni tartibga solish slipning cheklanganligi bilan chegaralanishi mumkin.
.
Aylanish tezligini nazorat qilishning ushbu uslubining asosiy kamchiliklari rotorli sariqlikdagi yo'qotishlar ortishi natijasida qayish tezligiga mutanosib ravishda past samaradorlik hisoblanadi
.
 |
Shuning uchun u avtomatik boshqaruv tizimlarida ishlaydigan kam quvvatli dvigatellarga nisbatan qo'llaniladi.
Fazli rotorli motorlarda aylanish tezligi rotordagi qarshilikni o'zgartirib o'zgartirilishi mumkin (4.34-rasm).
Chastotani nazorat qilish uslubining afzalligi maksimal torkning o'zgarmasligi hisoblanadi. Dvigatel yo'qotishning bir qismi rezistorda amalga oshirilayotganini va shuning uchun mexanizmning termal rejimini osonlashtiradi. Qolgan usuli avvalgi holatga o'xshash va kam samaradorlik, yukga qarab kichik nazorat oralig'i va "yumshoq" mexanik xarakteristikasi bilan tavsiflanadi.
Qaymoqni o'zgartirib, aylanish tezligini sozlashda dvigatelning samaradorligini oshirish uchun foydali ishni bajarish yoki tarmoqqa qaytarish uchun slipni ishlatish zarur. Ushbu g'oyani amalga oshiradigan sxemalar deyiladi kaskad. Ushbu turdagi umumiy davriy davrlardan biri asenkron-klapan kaskad davri (4.35-rasm).
Ushbu sxemada o'zgarishlar rotori (BP), diodli rektifikatri (D), tekislashtiruvchi bo'g'ma (DR), tiristor invertor (I) va tarmoqni ta`sirlovchi transformator (Tr) bilan mos kelmaydigan vosita mavjud. Tezlik regulyatori inverterning kuchlanishini o'zgartirish orqali amalga oshiriladi. Bu rotorni o'rash kuchlanishidagi o'zgarishlarga va shuning uchun rotorning aylanish tezligiga olib keladi. Dvigatelning rotorli shamolidan olingan slip chastotasining kuchi tarmoqqa mos keladigan transformator orqali uzatiladi.
Stator davridagi chastotali nazorat qilish davrlari bilan taqqoslaganda (4.28-rasm) asenkron motorlarning aylanish tezligi uchun kaskadli nazorat qilish davrlarini afzalligi shundaki, yarim Supero'tkazuvchilar konvertor motorning to'liq quvvatiga emas, balki slip kuchida amalga oshiriladi. Ushbu holat ayniqsa, aylanish tezligini nazorat qilishning cheklangan miqdori talab qilinadigan (2: 1 va undan kam) nasoslar, matkaplar, konveyerlar, o'chirish mexanizmlari va hokazolarning yuqori quvvatli va super quvvatli drayvlari uchun juda muhimdir.
Asenkron klapan kaskad boshqarilmaydigan rektifikator bilan regeneratsiyani sinxron tezlikdan pastga yo'naltirishga imkon beradi. Agar boshqariladigan rektiferni ishlatsangiz, tezkorlikni sinxronlashdan sozlashingiz mumkin. Bunday holatda, qaymoq kuchini uzatish yo'nalishi farqlanadi.