На сегодняшний день асинхронные электродвигатели являются самыми распространёнными потребителями электроэнергии в мире и используются повсеместно, начиная от бытовых устройств, таких как пылесос, холодильник или вентилятор и заканчивая крупными промышленными установки, в которых мощность электродвигателей измеряется в мегаваттах. Это насосные станции, конвейеры, горнодобывающие установки, системы вентиляции или дымоудаления и т.д. Согласно статистики в мире используется около 300 миллионов трехфазных асинхронных электродвигателей с напряжением 380В.
Ежегодно около 10% из этих электродвигателей выходят из строя из-за неправильной эксплуатации, перегрузок или аварийных режимов работы. Часто выход из строя связано с процессом пуска асинхронного электродвигателя, когда он должен набрать номинальную скорость вращения в механизмах с большим моментом инерции. Соответственно момент пуска для асинхронного электродвигателя является тяжелым режимом работы с большой механической и электрической нагрузкой. Пусковые токи асинхронного электродвигателя могут превышать номинальные в 10 – 12 раз.
Виды пуска электродвигателей и их особенности
Прямой пуск асинхронного электродвигателя – это наиболее традиционный способ пуска, который используется с момента появления электродвигателей и до настоящего времени. Это наиболее технически просто реализуемое и экономически выгодное решение, позволяющее запустить электродвигатель при номинальном напряжении. При таком способе пуска используется минимальный набор коммутационного оборудования, однако в настоящее время он в основном применяется для пуска электродвигателей небольших мощностей в связи с определенным количеством недостатков, который можно разделить на 2 категории: электрические и механические.
Электрические проблемы:
При прямом пуске асинхронного электродвигателя происходит довольно большой бросок тока, который приводит к падению напряжения в питающей сети. А также может привести к срабатыванию защиты, особенно в случаях, когда не применяется специальные аппараты для защиты электродвигателя. Кроме того, в случае затяжного пуска, длительное протекание тока превышающего номинальный в 6 -8 раз оказывает значительное тепловое и электродинамическое воздействие как на кабель подключенный к электродвигателю, так и на обмотки асинхронного электродвигателя, что приводит к их повышенному износу.
Механические проблемы:
Высокий начальный пусковой момент может привести к значительному толчку и, следовательно, к существенной нагрузке на механизмы электропривода, такие как ремни или крепления узла подшипника. Это вызывает их сокращение срока службы или полный выход из строя. В случае особо ответственных производств простои оборудования в течение времени пока будет производиться ремонт могут привести к значительным убыткам. При останове, как и при пуске, возникают сильные механические вибрации, вызванные переходными процессами. Они не позволяют осуществить синхронную работу нескольких независимых узлов в сложных станках линиях или установках.
Пуск по схеме звезда-треугольник , также является одним из известных способов пуска асинхронных электродвигателей. Этот метод используется для снижения механических нагрузок и ограничения пускового тока. Но и у него есть несколько недостатков. Во-первых, электродвигатель обязательно должен иметь 6 клемм для подключения питания. Во-вторых, для пуска по данной схеме необходимы 3 контактора, что опять же увеличивает стоимость и габариты установки. При переключении со схемы звезда на схему треугольник все равно происходит, пусть и кратковременный, но большой по амплитуде бросок тока. В-третьих, требуется использование двух кабелей от пункта управления до электродвигателя, что в случае длинных линий достаточно дорого. И последний недостаток заключается в том, что останов электродвигателя при подобной схеме подключения точно такой же как и при прямом пуске.
Третий способ пуска – использование устройств плавного пуска .
Устройство плавного пуска – это механическое, электронное или электромеханическое устройство, используемое для плавного пуска или останова электродвигателей. Благодаря применению устройства плавного пуска можно одновременно обеспечить плавный разгон и останов асинхронного электродвигателя, добиться улучшения стабильности электрических сетей, то есть уменьшить броски тока при пуске и значительно уменьшить просадки напряжения в сети при тяжелом пуске. Кроме того, использование систем плавного пуска минимизируют механические перегрузки оборудования при пуске и останове, уменьшает износ механизмов и тем самым увеличивает срок службы асинхронных электродвигателей, редукторов, муфт и других деталей привода. Поэтому самым оптимальным решением по соотношению функционал – стоимость для пуска асинхронных электродвигателей, в случае если нет необходимости постоянного регулирования скорости, являются устройства плавного пуска.
Общая
характеристика условий пуска синхронных
и асинхронных двигателей.
Пуск двигателей в ход, или пусковой
режим электропривода, входящего в состав
комплексной нагрузки - это процесс
перехода двигателей и соответственно
рабочих механизмов из неподвижного
состояния
в состояние вращения с нормальной
скоростью.
Пуск двигателей, являющийся существенной частью режима работы двигателей, относится к числу нормальных переходных процессов.
При проектировании электропривода и выборе соответствующего двигателя устанавливают
время пуска двигателя;
допустимость продолжительности процесса пуска;
проверяют плавность пуска (что особенно важно, например, для подъемных кранов и печатных машин);
определяют нагрев двигателя при пуске;
находят величину ускорения и его постоянство при пуске (что желательно для ряда механизмов, например для пассажирских лифтов).
Большие токи при пуске могут вызвать понижение напряжения, создать неблагоприятное влияние на другие двигатели и другие виды нагрузки и привести к тому, что данный двигатель будет фактически разгоняться медленнее, чем это предполагалось при неизменном напряжении на его зажимах. В этих условиях требуется определение времени пуска двигателей и зависимости пускового тока от времени. Вследствие снижения напряжения в сети вращающий момент двигателя может оказаться либо меньше момента сопротивления механической нагрузки, либо ненамного больше и разгон двигателя будет соответственно или невозможен, или недопустимо затянут.
Во время пуска двигатель должен развивать вращающий момент, необходимый, во-первых, для преодоления момента сопротивления механизма и, во-вторых, для создания определенной кинетической энергии вращающихся масс агрегата. При пуске двигатель потребляет от источника повышенное количество энергии, что и отражается в увеличении пускового тока. Кратность пускового тока по отношению к номинальному составляет у асинхронных двигателей 1.5 – 2 при реостатном пуске (для двигателей с фазным ротором) и 5 – 8 при пуске двигателя с короткозамкнутым ротором.
Повышенный нагрев при пуске накладывает определенные ограничения на электроприводы, применяющиеся там, где требуются частые пуски в ход. В этих условиях используют двигатели специальных конструкций, а также проводят различные мероприятия, облегчающие пуск.
Условия пуска обычно разделяют на легкие, нормальные и тяжелые.
При легких условиях требуемый момент в начале вращения двигателя составляет 10 – 40 % от номинального.
К нормальным условиям пуска относятся такие, при которых механизм требует пускового момента, равного 50 – 75 % от номинального.
К тяжелым условиям пуска относятся такие, при которых требуемый начальный момент составляет 100% номинального и выше. К последним относятся условия пуска таких механизмов, как компрессоры, дробильные барабаны, различные устройства для перемешивания, а также насосы с открытой задвижкой, приводы со значительным моментом инерции. В некоторых специальных случаях, например при использовании однофазных двигателей и синхронных двигателей, у которых не предусмотрен самозапуск, электрический пуск агрегата в ход заменяется механическим с помощью разгонных устройств. Такие случаи, однако, становятся все более и более редкими и не будут рассматриваться в данном курсе.
Для облегчения тяжелых условий пуска в некоторых приводах применяются специальные механические средства: центробежные, сцепные ферромагнитные или гидравлические муфты, с помощью которых двигатель принимает нагрузку лишь после того, как он достиг нужной скорости и стал развивать надлежащий вращающий момент.
Для управления пуском и ограничения пускового тока могут применяться пускорегулирующая аппаратура и специальные схемы пуска.
Схемы пуска. В основном используются три схемы пуска, которые рассмотрены применительно к синхронным двигателям; пуск асинхронных двигателей отличается лишь тем, что в нем отсутствует последняя стадия – подача возбуждения и втягивание в синхронизм.
Автотрансформаторный пуск осуществляется по схеме, показанной на рис.11.1,а . При пуске сначала включается нулевой выключатель 1 , после чего включается выключатель 2 , присоединяющий автотрансформатор к сети. Двигатель подключен к пониженному (через автотрансформатор) напряжению разгоняясь, потребляет сравнительно небольшой ток. По достижению подсинхронной скорости, включается возбуждение и двигатель входит в синхронизм; выключатель 1 отключается и включается шунтирующий выключатель 3 , который подает на двигатель нормальное напряжение.
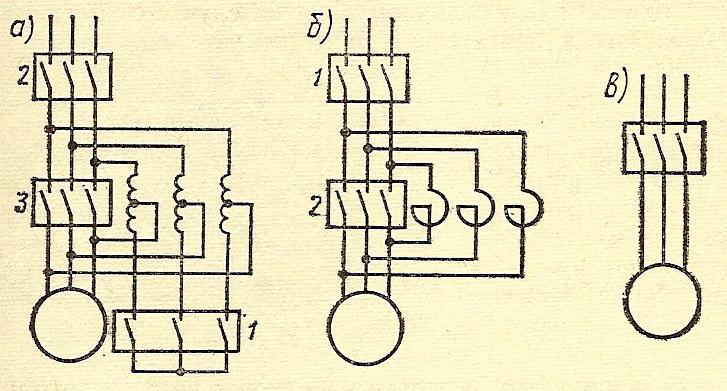
Рис.15.1. Схемы пуска двигателей:
а – автотрансформаторный; б – реакторный; в - прямой
У синхронных двигателей при легком пуске возбуждение на двигатель подается до включения выключателя 3 ; при тяжелом пуске возбуждение подключается после включения шунтирующего выключателя, т.е. после подачи на двигатель полного напряжения сети.
Если напряжение сети снижается с помощью автотрансформатора в k раз, то ток, потребляемый из сети при пуске, снижается пропорционально квадрату напряжения k 2 раз. Однако автотрансформатор довольно дорого и обладает недостатками в эксплуатации, так как создает толчки тока при переключении и иногда служит причиной аварии. Все это привело к тому, что от автотрансформаторного пуска отказываются и в настоящее время он применяется крайне редко.
Реакторный пуск осуществляется согласно схеме, приведенной на рис.11.1,б . Пусковой реактор ограничивает величину пускового тока и снижает напряжение на двигателе при пуске за счет падения напряжения в реакторе. В начале пуска шунтирующий выключатель 2 отключен. С помощью выключателя 1 двигатель подключается к сети через реактор. По мере разгона двигателя ток снижается. Это приводит к уменьшению падения напряжения в реакторе и, следовательно, к увеличению напряжения на двигателе. При подсинхронной скорости двигатель получает возбуждение и входит синхронизм, после чего включается шунтирующий выключатель 2 , выключая пусковой реактор. При этом двигатель оказывается подключенным непосредственно к сети.
Величина сопротивления реактора

где
 -
величина, до которой необходимо ограничить
пусковой ток с помощью реактора;
-
величина, до которой необходимо ограничить
пусковой ток с помощью реактора; -
пусковой ток двигателя при номинальном
напряжении
-
пусковой ток двигателя при номинальном
напряжении на его зажимах.
на его зажимах.
При
напряжении сети
 ,
отличном в общем случае от,
величина напряжения
,
отличном в общем случае от,
величина напряжения ,
подводимого к двигателю при пуске,
,
подводимого к двигателю при пуске,
 .
.
При этом пусковой ток двигателя

Пусковой момент при реакторном пуске снижается:
Недостаток пуска через реактор – необходимость дополнительного оборудования (пускового реактора и шунтирующего выключателя). Рассмотренную схему обычно применяют при необходимости значительного снижения тока в сети и достаточности для пуска небольшого превышения пускового момента над статическим моментом механизма.
Прямой пуск осуществляется согласно схеме, приведенной на ри.11.1, в . Двигатель включается на полное напряжение сети с помощью выключателя. Вращающий асинхронный момент заставляет двигатель достигнуть подсинхронной скорости, после чего подается возбуждение и он входит в синхронизм. Преимущество прямого пуска – отсутствие сложных пусковых устройств, простота схемы и значительное сокращение времени пуска.
УРАВНЕНИЕ ДВИЖЕНИЯ ПРИ ПУСКЕ И ЕГО ИНТЕГРИРОВАНИЕ
Процесс движения двигателя описывается уравнением
 ,
(1)
,
(1)
где М – электромагнитный момент двигателя; М мех – момент сопротивления рабочего механизма; Т j – постоянная инерции агрегата.
В случае синхронного двигателя
 .
.
Постоянная инерции Т j определяется суммой маховых моментов двигателя и механизма (нагрузки):

Определение
времени разбега при пуске или остановке
требует выяснения зависимости вращающего
момента двигателя М и момента сопротивления
механизма М мех
от скольжения, причем при определении
зависимости
 необходимо учитывать влияние сопротивления,
через которое двигатель подключается
к сети.
необходимо учитывать влияние сопротивления,
через которое двигатель подключается
к сети.
Заметим,
что для упрощения анализа переходных
режимов часто при определении зависимости
пользуются только статическими
характеристиками, хотя при резком
изменении напряжения питания двигатели
(включении двигателя в сеть, переключении
на резервный источник питания, понижении
напряжения в случае короткого замыкания
в сети и т.д.) следовало бы пользоваться
динамическими характеристиками.
Переходные слагающие токов в цепях
статора и ротора двигателя, которые
создают дополнительные динамические
составляющие момента, изменяющиеся во
времени даже при постоянном скольжении,
не учитывают. Обычно влияние дополнительных
моментов на время пуска или выбега
невелико и ими пренебрегают (учитывая
только при определении наибольших
механических усилий).
При
решении уравнения (1) необходимо учитывать
характер зависимостей
и .
Здесь могут быть применены аналитические
методы решения уравнения движения
синхронных генераторов и способ
последовательных интервалов. Возможны
упрощенные решения при аппроксимации
зависимостейипрямыми или некоторыми кривыми, при
которых интегрирование (1) оказывается
возможным.
.
Здесь могут быть применены аналитические
методы решения уравнения движения
синхронных генераторов и способ
последовательных интервалов. Возможны
упрощенные решения при аппроксимации
зависимостейипрямыми или некоторыми кривыми, при
которых интегрирование (1) оказывается
возможным.
Рассмотрим способ последовательных интервалов, обеспечивающий решение при любых зависимостях моментов М. Техника расчета пусковых режимов двигателей при этом несколько отличается от техники расчета устойчивости. Однако все общие положения способов не изменяются и ниже излагаются только некоторые особенности.
Пуск асинхронных двигателей.
Здесь можно рассмотреть два случая – общий и частный.
Общий
случай
:
.
Предполагая, что М и М мех
не зависят ни от времени, ни от ускорения
и целиком определяются скольжением s,
построим статические характеристики
и, как разность их, зависимость![]() .
Разобьем
.
Разобьем на ряд равных интервалов (рис.12.12) по
скольжению:
на ряд равных интервалов (рис.12.12) по
скольжению:
 .
.
Тогда уравнение движения (12-1) на любом интервале будет иметь вид
 или
или
 .
.
Аналогично можно выразить и приращение скорости вращения (оборотов):
 ,
(2,а)
,
(2,а)
где
 - среднее значение избыточного момента
на данном интервале.
- среднее значение избыточного момента
на данном интервале.
Время от момента пуска до конца любого i -го интервала
 .
(2,б)
.
(2,б)
Точность
решения возрастает с уменьшением
величины
 и
соответственно с увеличением количества
интервалов.
и
соответственно с увеличением количества
интервалов.

Частный
случай:
 .
Аналитическое решение уравнения (12-1)
можно получить, если принять, чтов
течение всего процесса разбега (или
выбега); пусть при этом М определяется
выражением, соответствующим упрощенной
схеме замещения двигателя:
.
Аналитическое решение уравнения (12-1)
можно получить, если принять, чтов
течение всего процесса разбега (или
выбега); пусть при этом М определяется
выражением, соответствующим упрощенной
схеме замещения двигателя:
 ,
(3)
,
(3)
В этом случае избыточный момент определится из выражения (1) с учетом (3):
 ,
(4)
,
(4)
причем
 .
.
В
общем случае согласно (1) время разбега
(или выбега) от
 до
до

или после подстановки (4)
Время
разбега
 от скорости
от скорости до скорости
до скорости определяется решением (5) при
определяется решением (5) при :
:
где - установившееся скольжение по окончании разбега.
При
разбеге без нагрузки

 .
.
Из
(6) для полного времени пуска
![]() получаем
получаем .
Это означает асимптотическое приближение
скорости к ее установившемуся значению.
.
Это означает асимптотическое приближение
скорости к ее установившемуся значению.
Приближенно
время пуска
 можно найти, принимая (на основании
расчетов или опытов)
можно найти, принимая (на основании
расчетов или опытов)
 :
:
Время
выбега от скорости
 до скорости
до скорости определяется решением (5) при
определяется решением (5) при :
:
где

Время
выбега от предшествующего установившегося
режима до полной остановки определяется
подстановкой величин
 в равенство (6б). При отключении одиночного
двигателя от сети время выбега
в равенство (6б). При отключении одиночного
двигателя от сети время выбега
 (7)
(7)
откуда скольжение двигателя в любой момент времени
 (8)
(8)
и скорость вращения
где
скорость до отключения двигателя
 .
.
В соответствии с равенством (9) можно заключить, что кривая выбега (зависимость скорости вращения агрегата от времени) отключенного от сети двигателя с постоянным моментом сопротивления на валу представляет собой прямую линию.
На основании (7) время полной остановки агрегата
 .
(10а)
.
(10а)
При моменте сопротивления на валу, равном номинальному, время остановки примерно равно постоянной инерции:
 .
(10б)
.
(10б)
По времени остановки агрегата с не зависящим от скорости моментом сопротивления на валу экспериментально определяется постоянная инерции:
 (10в).
(10в).
Пуск
синхронных двигателей.
Синхронные двигатели при пуске
подключаются сначала к сети невозбужденными.
Их обмотки возбуждения при этом
короткозамкнуты или замкнуты на
сопротивление
 ,
где
,
где - сопротивление обмотки возбуждения.
Разгоняясь как асинхронные, они достигают
скорости, близкой к синхронной
(подсинхронная скорость). После этого
двигателям подается возбуждение и они,
приобретаясвойства
синхронного двигателя
,
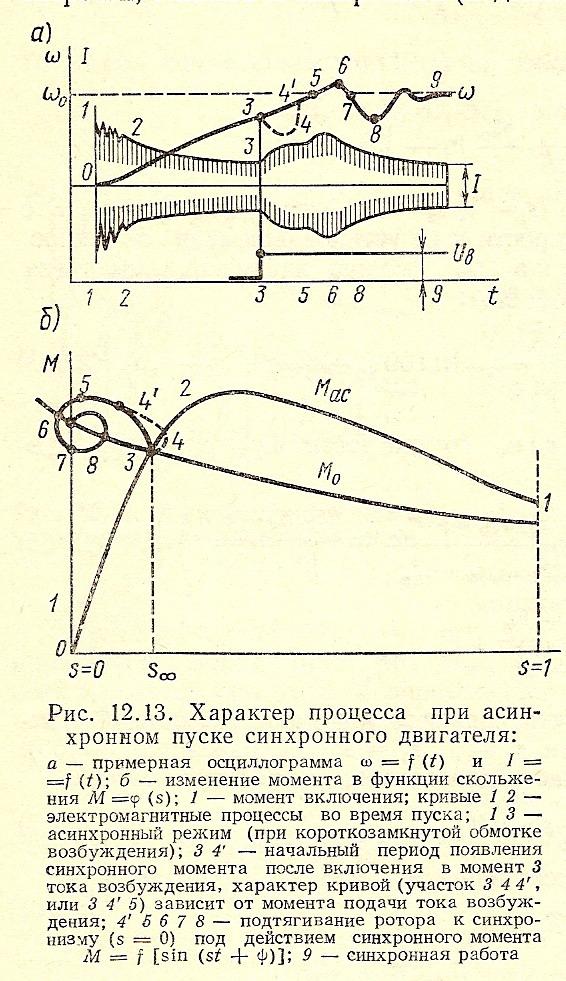
входят в синхронизм. Таким образом,
процесс пуска синхронного двигателя
можно разбить условно на два этапа
(рис.12.13): 1) – разгон до подсинхронной
скорости (
- сопротивление обмотки возбуждения.
Разгоняясь как асинхронные, они достигают
скорости, близкой к синхронной
(подсинхронная скорость). После этого
двигателям подается возбуждение и они,
приобретаясвойства
синхронного двигателя
,
входят в синхронизм. Таким образом,
процесс пуска синхронного двигателя
можно разбить условно на два этапа
(рис.12.13): 1) – разгон до подсинхронной
скорости ( )
происходит в основном под действием
среднего асинхронного момента; 2) –
вхождение в синхронизм под влиянием
моментов, обусловленных возбуждением
и зависящих от угла между осью ротора
и вектором вращающегося поля статора.
)
происходит в основном под действием
среднего асинхронного момента; 2) –
вхождение в синхронизм под влиянием
моментов, обусловленных возбуждением
и зависящих от угла между осью ротора
и вектором вращающегося поля статора.
На
первом этапе
пуска существенны начальный толчок
периодической слагающей тока статора
-
 ,
где
,
где - напряжение сети в той точке, где оно
может быть принято не зависящим от
режима двигателя;
- напряжение сети в той точке, где оно
может быть принято не зависящим от
режима двигателя; ,
причем
,
причем - внешнее сопротивление цепи статора
между точкой с напряжениеми выводами статора данного двигателя.
- внешнее сопротивление цепи статора
между точкой с напряжениеми выводами статора данного двигателя.
Длительность разгона до подсинхронной скорости можно определять так же, как и для асинхронных двигателей. Однако при проектировании ее обычно находят графоаналитическими методами. Более точно изменение токов статора и ротора в процессе разгона двигателя может быть получено с помощью уравнения Парка-Горева.
На
втором этапе
пуска на несинхронно вращающийся ротор
синхронного двигателя кроме асинхронного
момента действует синхронный момент,
зависящий от угла
 и обусловленный возбуждением, а также
момент сопротивления механизма.
и обусловленный возбуждением, а также
момент сопротивления механизма.
Практически вхождение в синхронизм может произойти только после подачи возбуждения, за счет которого у двигателя будет создан дополнительный момент, меняющийся по знаку (знакопеременный). Скорость вращения двигателя под воздействием знакопеременного момента будет колебаться около средней величины с двойной частотой скольжения. На ротор действуют и другие знакопеременные моменты, а именно момент явнополюсности
и
переменная составляющая асинхронного
момента, то иногда втягивание в синхронизм
может произойти и без подачи возбуждения.
Для этого, однако, необходимо, чтобы
втягивающий момент был больше
механического:
 ,
что можно получить сравнительно редко.
Характер процесса вхождения в синхронизм
зависит от взаиморасположения ротора
и магнитного потока статора в момент
подачи возбуждения. Но положение ротора
в момент подачи возбуждения обычно
оказывает сравнительно малое влияние,
поэтому можно не предусматривать
специальных устройств для подачи
возбуждения в наивыгоднейший момент.
,
что можно получить сравнительно редко.
Характер процесса вхождения в синхронизм
зависит от взаиморасположения ротора
и магнитного потока статора в момент
подачи возбуждения. Но положение ротора
в момент подачи возбуждения обычно
оказывает сравнительно малое влияние,
поэтому можно не предусматривать
специальных устройств для подачи
возбуждения в наивыгоднейший момент.
Успешность синхронизации можно приближенно оценить по значению критического скольжения установившегося асинхронного режима без возбуждения, при котором возможно вхождение в синхронизм 2:
где
 - максимальный электромагнитный
синхронный момент при номинальном
возбуждении.
- максимальный электромагнитный
синхронный момент при номинальном
возбуждении.
Если
скольжение
 синхронного двигателя, определенное
точкой пересечения кривых среднего
асинхронного момента и момента
сопротивления, будет равно или меньше
синхронного двигателя, определенное
точкой пересечения кривых среднего
асинхронного момента и момента
сопротивления, будет равно или меньше ,
то втягивание в синхронизм обеспечено.
,
то втягивание в синхронизм обеспечено.
Однако
при изменении скольжения во время
втягивания в синхронизм динамические
характеристики асинхронного момента
могут отличаться от статических. Средний
динамический асинхронный момент при
 не равен нулю, вследствие чего скорость
вращения может оказаться выше синхронной
и вхождение двигателей в синхронизм
облегчится. Синхронные двигатели часто
втягиваются в синхронизм при скольжениях,
больших.
Поэтому при
не равен нулю, вследствие чего скорость
вращения может оказаться выше синхронной
и вхождение двигателей в синхронизм
облегчится. Синхронные двигатели часто
втягиваются в синхронизм при скольжениях,
больших.
Поэтому при следует или вводить корректировку
скольжения на основании экспериментальных
данных, полученных для аналогичных
установок, или проводить точные расчеты.
следует или вводить корректировку
скольжения на основании экспериментальных
данных, полученных для аналогичных
установок, или проводить точные расчеты.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ПУСКЕ АД МОЩНОСТЬЮ СОИЗМЕРИМОЙ С МОЩНОСТЬЮ ИСТОЧНИКА
В мощных электрических системах нарушения устойчивости наиболее вероятны при аварийных или послеаварийных режимах. В системах, у которых мощности отдельных нагрузок соизмеримы с мощностью системы, устойчивость может нарушаться и при нормальных (с точки зрения эксплуатации) режимах. Наиболее опасным в этом смысле является прямой пуск короткозамкнутых асинхронных двигателей, обычно составляющих основную часть нагрузки.
Большой пусковой ток этих двигателей вызывает резкое снижение напряжения в системе, что приводит к увеличению скольжения остальных работающих двигателей. Соотношение загрузки двигателей и снижения напряжения в сети обычно бывает таково, что реактивная мощность, потребляемая двигателями, возрастает. Это вызывает дальнейшее понижение напряжения и может привести к опрокидыванию работающих двигателей и к возникновению лавины напряжения. Происходящее нарушение устойчивости параллельно работающих станций ведет к длительному перерыву электроснабжения потребителей. Поэтому устойчивость таких систем должна особо проверяться по условиям пуска короткозамкнутых двигателей.
Весьма опасным является неудачный пуск двигателей, мощность которых соизмерима с мощностью генератора.
Анализ процессов пуска двигателей и устойчивости узлов нагрузки довольно сложен, и в инженерной практике часто пользуются упрощенными методами. Прежде чем рассмотреть их, остановимся на процессах, которые происходят при пуске асинхронного двигателя, питаемого от генератора соизмеримой мощности.
Изменение напряжения во время пуска двигателя в этом случае происходит примерно следующим образом: в первый момент после включения двигателя напряжение на шинах генератора уменьшается вследствие падения напряжения в переходном реактивном сопротивлении генератора при протекании в нем пускового тока двигателя.
В
случае отсутствия на генераторе
автоматического регулирования возбуждения
напряжение на шинах генератора начнет
уменьшаться, поскольку пусковые токи,
являясь практически реактивными до
скольжения
 ,
будут размагничивать генератор. Если
время пуска больше времени
,
будут размагничивать генератор. Если
время пуска больше времени
электромагнитного переходного процесса в генераторе, то к окончанию переходного процесса на генераторе значение напряжения будет ниже, чем начальное значение напряжения в момент пуска двигателя. На последнем этапе разгона пусковой ток резко уменьшится и одновременно повысится коэффициент мощности. Все это приведет к увеличению напряжения генератора.
Понижение напряжения на шинах генератора в процессе пуска резко изменяет все пусковые характеристики двигателя (рис.12.14), увеличивает длительность пуска, уменьшает момент двигателя, что может привести к невозможности осуществления пуска (рис.12.14,б ). Условия пуска могут быть облегчены либо выбором двигателя с меньшим пусковым током, либо автоматическим регулированием возбуждения генератора. При наличии последнего напряжение генератора после затухания переходного электромагнитного процесса может быть выше, чем начальное значение напряжения генератора в момент пуска двигателя; при определенной величине тока возбуждения напряжение может быть равно номинальному напряжению генератора (см. пример.12.1).
Запуск
одиночного (эквивалентного) двигателя.
Если пренебречь переходными процессами
возбудителя и считать, что э.д.с.
 при снижении напряжения меняется скачком
до нового установившегося значения или
при отсутствии регулирования остается
постоянной, то изменение напряжения на
генераторе от начального значения
при снижении напряжения меняется скачком
до нового установившегося значения или
при отсутствии регулирования остается
постоянной, то изменение напряжения на
генераторе от начального значения до установившегося 3
будет практически по экспоненциальному
закону:
до установившегося 3
будет практически по экспоненциальному
закону:
 (1)
(1)
Начальное
значение напряжения в момент включения
двигателя
определяется по величине переходной
э.д.с., которая в случае холостого хода
принимается равной
В
момент пуска двигатель можно заменить
постоянной нагрузкой, представленной
сопротивлением
 ,
где
,
где
 (2)
(2)
Здесь
 - к.п.д. двигателя;
- к.п.д. двигателя; - кратность пускового тока;
- кратность пускового тока; ,
, - номинальное значение коэффициента
мощности генератора и пусковое значение
коэффициента мощности двигателя
соответственно;
- номинальное значение коэффициента
мощности генератора и пусковое значение
коэффициента мощности двигателя
соответственно; - номинальные активные мощности
соответственно на шинах генератора и
на валу двигателя;
- номинальные активные мощности
соответственно на шинах генератора и
на валу двигателя; - напряжение на шинах генератора и
двигателя.
- напряжение на шинах генератора и
двигателя.
Примем,
что
 При сделанных допущениях, согласно
векторной диаграмме можно определить
напряжение 4
на генераторе.
При сделанных допущениях, согласно
векторной диаграмме можно определить
напряжение 4
на генераторе.
 .
(3)
.
(3)
Здесь
 - полное сопротивление цепи (
- полное сопротивление цепи ( );
аналогично находятся
);
аналогично находятся и
и ,
причем сопротивление сети
,
причем сопротивление сети ,
связывающей генератор и двигатель,
введено
,
связывающей генератор и двигатель,
введено (соответственно сопротивление
(соответственно сопротивление в
в ).
В случае явнополюсного генератора
).
В случае явнополюсного генератора ,
в случае неявнополюсного
,
в случае неявнополюсного .
.
При
еще более упрощенном подходе
 .
.
Установившееся
значение напряжения может быть определено
по последней формуле при подстановке
в нее установившегося значения э.д.с.
 и сопротивление
и сопротивление .
Однако практически его проще найти с
помощью заранее рассчитанных кривых
типа показанных на рис.12.14,в
.
Зная допустимое снижение напряжения
на шинах нагрузки при пуске
.
Однако практически его проще найти с
помощью заранее рассчитанных кривых
типа показанных на рис.12.14,в
.
Зная допустимое снижение напряжения
на шинах нагрузки при пуске
 ,
можно определить предельно допустимую
мощность пускаемых двигателей, при
которой напряжение в первый момент
пуска имеет допустимую величину
,
можно определить предельно допустимую
мощность пускаемых двигателей, при
которой напряжение в первый момент
пуска имеет допустимую величину :
:
 ,
,
где
 - к.п.д. двигателя;
- к.п.д. двигателя; - коэффициент мощности;
- коэффициент мощности; - коэффициент загрузки;
- коэффициент загрузки; - пусковое сопротивление, определяемое
при
- пусковое сопротивление, определяемое
при :
:
 .
.
Зная
допустимый уровень напряжения на зажимах
генератора, можно найти величину тока
возбуждения, необходимую для поддержания
установившегося значения напряжения
не меньше
 .
Для этого, полагая
.
Для этого, полагая и
и ,
определяем по кривым соответствующую
величину
,
определяем по кривым соответствующую
величину .
где-
сопротивление цепи, включающее
.
где-
сопротивление цепи, включающее в случае явнополюсного генератора и
в случае явнополюсного генератора и - в случае неявнополюсного. Разумеется,
справедливо и обратное соотношение
- в случае неявнополюсного. Разумеется,
справедливо и обратное соотношение ,
а также
,
а также .
Если ток возбуждения будет меньше
найденного значения, то напряжение на
генераторе после включения двигателей
будет меньше допустимого и запуск
двигателей недопустимо затянется.
.
Если ток возбуждения будет меньше
найденного значения, то напряжение на
генераторе после включения двигателей
будет меньше допустимого и запуск
двигателей недопустимо затянется.
Выбор преобразователя частоты
При определении характеристик преобразователя частоты для заданной нагрузки первым шагом является рассмотрение нагрузочных характеристик. Существуют четыре различных способа расчета требуемых выходных параметров, при этом выбор способа зависит от характеристик электродвигателя.
Нагрузочные характеристики
Прежде чем определить типоразмер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми нагрузочными характеристиками. Нагрузочные характеристики различаются между собой следующим образом:
Рис. 1. Постоянный и квадратичный нагрузочный момент
Когда скорость центробежных насосов и вентиляторов увеличивается, потребляемая мощность возрастает в третьей степени (Р = n 3).
Обычный рабочий диапазон центробежных насосов и вентиляторов лежит в пределах скоростей от 50 до 90 %. Коэффициент нагрузки возрастает пропорционально квадрату скорости, т. е. приблизительно от 30 до 80 %.
Оба эти фактора проявляются в характеристиках крутящего момента электродвигателя, управляемого преобразователем частоты.
На рис 2 и 3 показаны характеристики крутящего момента для двух типоразмеров преобразователей частоты, один из них (рис. 3) имеет меньший диапазон мощности, чем другой. Для обеих характеристик крутящего момента были заданы одинаковые нагрузочные характеристики центробежного насоса.
На рис. 2 весь рабочий диапазон насоса (0-100 %) находится в пределах номинальных значений параметров двигателя. Поскольку обычный рабочий диапазон насоса находится в пределах 30-80 %, можно выбрать преобразователь частоты с меньшей выходной мощностью.

Рис. 2. Преобразователь частоты большой мощности
Рис. 3. Преобразователь частоты малой мощности
Если нагрузочный момент постоянен, электродвигатель должен быть способен развивать крутящий момент, превышающий нагрузочный момент, поскольку избыточный крутящий момент используется для разгона.
Для разгона и обеспечения высокого начального момента, например в случае привода ленточных транспортеров, достаточен кратковременный перегрузочный момент, составляющий 60 % от момента, развиваемого преобразователем частоты. Перегрузочный крутящий момент также обеспечивает системе способность преодолевать внезапные увеличения нагрузки. Преобразователь частоты, который не допускает никакого перегрузочного момента, должен выбираться таким образом, чтобы ускоряющий крутящий момент (T B) находился в пределах номинального крутящего момента.

Рис. 4. Перегрузочный крутящий момент используется для разгона
При определении нагрузочных характеристик рассматриваются четыре разных набора технических характеристик электродвигателя, позволяющие принять решения относительно выбора типоразмера преобразователя частоты по мощности.
1. Преобразователь частоты можно выбрать быстро и точно на основе значения тока l M , который потребляет электродвигатель. Если электродвигатель загружается не полностью, его ток может быть измерен при работе аналогичной системы с полной нагрузкой.
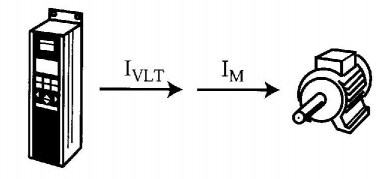
Рис. 5.
Электродвигатель 7,5 kW, 3 х 400 В потребляет ток 14,73 А.
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительный максимальный выходной ток больше или равен 14,73 А при постоянной или квадратичной характеристике крутящего момента.
Примечание:
Если преобразователь частоты выбирается на основе мощности (способы 2-4), необходимо сравнить расчетную мощность и мощность, указанную в технических данных преобразователя частоты, при одном и том же напряжении. Если преобразователь частоты рассчитывается на основе тока (способ 1), этого не требуется, поскольку выходной ток преобразователя частоты влияет на другие данные.
2. Преобразователь частоты можно выбирать на основе полной мощности S M , потребляемой электродвигателем и полной мощности, подаваемой преобразователем частоты.
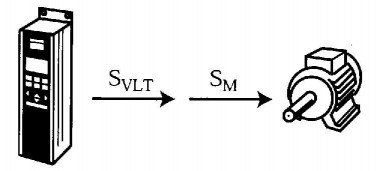
Рис. 6.
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3x400 В потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400 х 14.73 √3 / 1000= 10,2 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь частоты, у которого длительная максимальная выходная мощность больше или равна 10,2 кВА при постоянной или квадратичной характеристике крутящего момента.
3. Преобразователь частоты можно также выбирать по мощности Р м, вырабатываемой электродвигателем. Однако данный способ является неточным, поскольку cos φ и коэффициент полезного действия η изменяются с нагрузкой.

Рис. 7.
Пример расчета мощности электродвигателя
Электродвигатель мощностью 3 кВт, имеющий cos φ = 0,80 и η = 0,81, потребляет мощность S M = P M /(η х cos φ) = 3,0 / (0,80 х 0,81)=4,6 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительная максимальная выходная мощность больше или равна 4,6 кВА при постоянной или квадратичной характеристике крутящего момента.
4. На практике номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных электродвигателей. Поэтому преобразователи частоты часто выбирают исходя именно из этого соображения, что, однако, может привести к неточному определению их характеристик, особенно если электродвигатель не нагружается полностью.

Рис. 8.
Распределение тока в преобразователе частоты (cos φ (фи) электродвигателя)
Ток для намагничивания электродвигателя подается конденсатором, находящимся в промежуточной цепи преобразователя частоты. Ток намагничивания представляет собой реактивный ток, который протекает между конденсатором и электродвигателем (рис. 9).
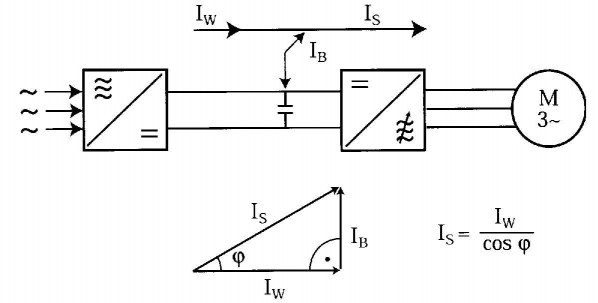
Рис. 9. Токи в преобразователе частоты
Из сети поступает только активный ток (l W). Именно поэтому выходной ток преобразователя частоты всегда больше входного тока. Кроме активного тока из сети потребляется ток I loss , (ток потерь).
Пример расчета
При отсутствии нагрузки ток 4-полюсного электродвигателя мощностью 1,1 кВт равен 1,6 А. Выходной ток подключенного преобразователя частоты составляет около 1,6 А, а входной ток при работе без нагрузки почти равен нулю.
Изготовители электродвигателей обычно указывают cos φ электродвигателя при номинальном токе. При меньшем значении cos φ (например, в случае реактивного синхронного электродвигателя) номинальный ток электродвигателя при одинаковых значениях мощности и напряжения будет больше, как видно из следующего уравнения:
I S = I W / cos φ
Если преобразователь частоты выбирается по номинальному току электродвигателя (способ 1), то снижения номинального крутящего момента электродвигателя не происходит.
Конденсатор, подключенный к клеммам электродвигателя для компенсации реактивного тока, необходимо удалить. Ввиду высокой частоты коммутации преобразователя частоты конденсатор ведет себя как короткозамкнутая цепь и вызывает существенное увеличение тока электродвигателя. Преобразователь воспримет это как замыкание на землю или короткое замыкание и отключится.
Управление скоростью электродвигателя
Выходная частота преобразователя частоты и, следовательно, скорость электродвигателя управляются одним или несколькими сигналами (0-10 В, 4-20 мА или импульсами напряжения). Когда подается сигнал на увеличение скорости, скорость электродвигателя возрастает, и вертикальная часть характеристик крутящего момента электродвигателя сдвигается вправо (рис. 10).

Рис. 10. Зависимость между управляющим сигналом и характеристиками крутящего момента электродвигателя
Если нагрузочный момент меньше, чем номинальный крутящий момент электродвигателя, скорость достигнет требуемого значения. Как показано на рис. 11, нагрузочные характеристики пересекаются с характеристиками крутящего момента электродвигателя в вертикальной части (в точке А). Если пересечение происходит в горизонтальной части (точка В), скорость электродвигателя не может длительное время превышать соответствующее значение, Преобразователь частоты допускает превышение предельного тока короткого замыкания без отключения (точка С), но продолжительность превышения обязательно должна быть ограничена по времени.
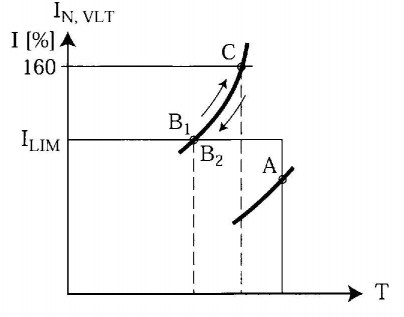
Рис. 11. Ток электродвигателя может в течение короткого времени превышать предел по току
Рампы разгона и торможения
Характеристика (рампа) разгона показывает темп, с которым происходит увеличение скорости вращения, и задается в виде времени разгона t acc . Эти рампы базируются, главным образом, на номинальной частоте электродвигателя, например, рампа разгона 5 с означает, что преобразователю частоты потребуется 5 секунд для перехода от нулевой до номинальной частоты электродвигателя (f = 50 Гц).
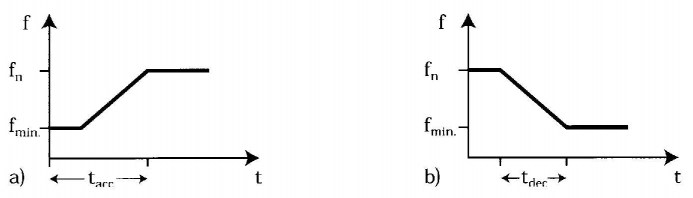
Рис. 12. Время разгона и торможения
Рампа торможения показывает, насколько быстро снижается скорость. Она задается в виде времени торможения t dec .
Возможен непосредственный переход от разгона к торможению, поскольку электродвигатель всегда отслеживает выходную частоту инвертора.
Если известен момент инерции вала электродвигателя, можно вычислить оптимальные значения времени разгона и торможения.
t acc = J x (n 2 -n 1)/[(T acc – T fric) x 9,55]
tdec = J x (n 2 -n 1)/[(T acc + T fric) x 9,55]
J - момент инерции вала электродвигателя.
T fric – момент трения системы.
Т асс - избыточный (перегрузочный) момент, используемый для разгона.
T dec - тормозящий момент (момент торможения), который возникает при уменьшении задания скорости.
n 1 и n 2 - скорости вращения на частотах f 1 и f 2 .
Если преобразователь частоты допускает кратковременный перегрузочный момент, то моменты разгона и торможения устанавливаются равными номинальному крутящему моменту электродвигателя Т. На практике время разгона и время торможения обычно одинаковы.
Пример расчета
J = 0,042 кгм 2 , T fric = 0,05 x M N , n 1 = 500 об/мин, n 2 = 1000 об/мин, Т N = 27 Нм
tacc = J х (n 2 – n 1)/ [(Т асс - T fric) х 9,55] = 0,042 х (1000 - 500)/ [(27,0 - (0,05 х 27,0)) х 9,55] = 0,1 [с]
Динамическое торможение
Когда сигнал задания скорости снижается, электродвигатель ведет себя как генератор и тормозит. Замедление при торможении зависит от величины нагрузки электродвигателя.
Электродвигатели, подключенные непосредственно к сети, отдают мощность торможения обратно в сеть.
Если электродвигатель работает от преобразователя частоты, энергия торможения сохраняется в промежуточной цепи преобразователя частоты. Если мощность, выделяемая при торможении, велика и преобразователь частоты не может рассеять ее за счет собственной конструкции, напряжение промежуточной цепи возрастает.
Напряжение промежуточной цепи может расти до тех пор, пока преобразователь частоты не будет отключен средствами защиты, и иногда к промежуточной цепи приходится подключать нагрузку в виде тормозного модуля и внешнего резистора для поглощения мощности торможения.?
Использование тормозного модуля и тормозного резистора позволяет осуществлять быстрое торможение при больших нагрузках. Однако, при этом возникают проблемы, связанные с нагревом. Другим решением является использование блока рекуперативного торможения. Такие блоки применяются для преобразователей частоты с неуправляемым выпрямителем и возвращают энергию торможения в питающую сеть.
В преобразователях частоты с управляемыми выпрямителями мощность торможения может возвращаться в сеть (см. рис. 13) с помощью, например, инвертора, подключенного к выпрямителю встречно-параллельно.

Рис. 13. Включение тормозного модуля и тормозного резистора
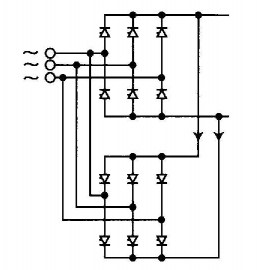
Рис. 14. Инвертор, включенный встречно-параллельно
Другой способ торможения электродвигателя - торможение постоянным током. Для создания магнитного поля в статоре используется напряжение постоянного тока, подаваемое между двумя фазами электродвигателя. Поскольку энергия торможения остается в электродвигателе и возможен перегрев, торможение постоянным током рекомендуется использовать в диапазоне низких скоростей, чтобы не превышать номинальный ток электродвигателя. Обычно торможение постоянным током ограничивается во времени.?
Реверс
Направление вращения асинхронных электродвигателей определяется порядком следования фаз питающего напряжения.
Если поменять местами две фазы, направление вращения электродвигателя изменится, и он будет вращаться в противоположном направлении.
Большинство электродвигателей сконструировано таким образом, чтобы заставить вал двигателя вращаться по часовой стрелке, если соединение выполнено следующим образом:
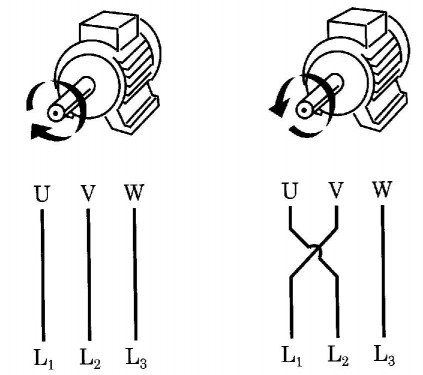
Рис. 15. Направление вращения электродвигателя изменяется путем изменения порядка следования фаз
Этому же правилу отвечает и порядок следования фаз на выходных клеммах большинства преобразователей частоты.
Преобразователь частоты может осуществлять реверс электродвигателя путем изменения порядка следования фаз с помощью электроники. Реверс производится либо путем задания отрицательной скорости, либо цифровым входным сигналом. Если при первоначальном вводе в эксплуатацию требуется, чтобы электродвигатель имел определенное направление вращения, необходимо знать заводскую настройку преобразователя частоты по умолчанию.
Поскольку преобразователь частоты ограничивает ток электродвигателя номинальным значением, двигатель, управляемый преобразователем частоты, можно реверсировать чаще, чем двигатель, подключенный непосредственно к сети.
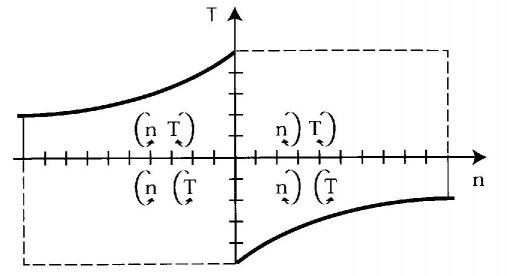
Рис. 16. Тормозной момент преобразователя частоты во время реверса
Рампы
Все преобразователи частоты имеют функции изменения скорости (рампы) для обеспечения плавной работы. Эти рампы можно изменять, и благодаря им задание скорости можно увеличивать или уменьшать в определенном интервале.
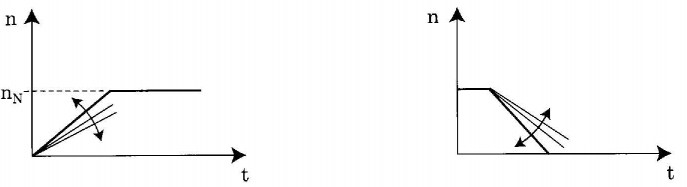
Рис. 17. Регулируемое время разгона и торможения
Угол наклона характеристики разгона/торможения (длительность разгона/торможения) можно установить таким малым, что в некоторых ситуациях электродвигатель не сможет отработать задание (не сможет разогнать/затормозить двигатель за заданное время).
Это приводит к увеличению тока электродвигателя до тех пор, пока не будет достигнут предел по току. В случае малого времени замедления (t -а) напряжение промежуточной цепи способно возрасти до такого уровня, что схема защиты преобразователя частоты остановит преобразователь.
Оптимальное время изменения скорости можно вычислить по приведенным ниже формулам.
t a = J x n/[(T N -T fric)x9,55]
t -a = J x n/[(T N +T fric)x9,55]
t a - время увеличения скорости
t -a - время уменьшения скорости
n - число оборотов
T N - номинальный крутящий момент электродвигателя
T fric - момент трения
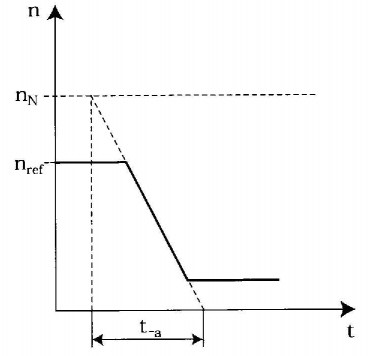
Рис. 18. Установка времени изменения скорости
Время разгона/торможения обычно выбирается исходя из номинальной скорости электродвигателя.
Текущий контроль
Преобразователи частоты могут контролировать регулируемый процесс и вмешиваться в него при неисправности.
Такой контроль может быть разделен на три вида в зависимости от объекта: контроль технологической установки, контроль электродвигателя и контроль преобразователя частоты.
Контроль установки основан на контроле выходной частоты, выходного тока и крутящего момента электродвигателя. На основании этих параметров можно устанавливать несколько пределов, превышение которых воздействует на функцию управления. Этими пределами могут быть допустимая наименьшая скорость электродвигателя (минимальная частота), допустимый наибольший ток (предел по току) или допустимый наибольший крутящий момент электродвигателя (предельный крутящий момент).
Преобразователь частоты может быть запрограммирован, например, на подачу предупреждающего сигнала, уменьшение скорости электродвигателя или останов последнего в случае выхода его скорости за установленные пределы.
Пример
В установках, использующих для соединения электродвигателя с остальной частью системы клиновой ремень, преобразователь частоты может программироваться на контроль состояния этого ремня.
Поскольку в случае разрыва ремня выходная частота будет увеличиваться быстрее, чем определяется заданной рампой, в таких ситуациях можно использовать эту частоту для подачи предупреждения или останова электродвигателя.
Контроль электродвигателя можно производить с помощью преобразователя частоты путем мониторинга тепловой модели электродвигателя или путем подключения к электродвигателю термистора. Преобразователь частоты может предотвращать перегрузку электродвигателя, действуя подобно термореле. В вычислениях, производимых преобразователем частоты, участвует и выходная частота. Это гарантирует, что электродвигатель не будет перегружаться на малых скоростях из-за ухудшения внутренней вентиляции. Современные преобразователи частоты также способны защищать электродвигатели с принудительной вентиляцией, если ток становится слишком большим.
Контроль преобразователя частоты традиционно производится таким образом, что в случае перегрузки по току преобразователь отключается. Некоторые преобразователи допускают кратковременную перегрузку по току. Микропроцессор в преобразователе частоты способен одновременно учитывать значение тока электродвигателя и время его приложения, что обеспечивает возможность оптимального использования преобразователя частоты без перегрузки.
По материалам Danfoss
Время пуска является одним из главных факторов при выборе двигателя. В момент пуска двигатель потребляет из сети пусковой ток, превышающий номинальный в 5-7 раз (для асинхронных двигателей с коротко- замкнутым ротором). При этом происходит усиленный нагрев обмоток, и если время пуска затягивается, температура обмоток может превысить допустимую.
Следовательно, большое значение для времени разгона имеет кратность пускового момента. Поэтому для компрессорных приводов рекомендуется применять электродвигатели с повышенным пусковым моментом (АОП).
Для агрегатов малой и средней мощности время пуска при сравнительно редких пусках обычно не превышает 3-5 с, для мощных агрегатов - 20-30 с.
Момент на валу асинхронного двигателя пропорционален квадрату напряжения. Таким образом, даже небольшое понижение напряжения в момент пуска резко снижает пусковой момент. Возможны случаи в сетях небольших мощностей, когда агрегат не может быть пущен в ход при полной нагрузке. Поэтому, выбирая двигатель, определяют величину минимально допустимого напряжения, при котором агрегат может быть пущен в ход.
Минимальный избыточный момент, обеспечивающий разгон привода, должен быть не менее 0,1 номинального момента электродвигателя. Статический момент компрессора принимается постоянным за время пуска и равным номинальному (пуск без разгрузки). Если сеть имеет недостаточную мощность и снижение напряжения может оказаться при пуске больше расчетного, то пуск следует производить при разгруженном компрессоре. Если такой пуск невозможен, двигатель с коротко-замкнутым ротором надо заменить на двигатель с фазным ротором или изменить схему пуска (применить схему с ограничением пускового тока).
Электротехника схемы управления электроприводом учитывает влияние снижения напряжения на работу аппаратуры пуска и управления (пускатели, реле и т.д.). Развитие современных компрессоров направлено на использование для их привода встроенных электродвигателей для малых, средних и крупных машин.
Исследования пусковых моментов поршневых холодильных компрессоров со встроенными электродвигателями позволили сделать определенные выводы по использованию последних для привода некоторых типов компрессоров. Так, применение встроенных электродвигателей позволяет добиться полной герметизации холодильного компрессора, отказаться от использования промежуточных звеньев (приводные ремни, муфты и т. п.), что повышает надежность установки и уменьшает количество используемого металла. Кроме того, охлаждение обмотки электродвигателя парами холодильного агента снижает его габариты за счет повышения удельной нагрузки.
Встроенные электродвигатели имеют меньшую стоимость по сравнению с электродвигателями обычного исполнения.
Работа компрессоров в широком диапазоне температур кипения и конденсации требует от встроенных электродвигателей высоких к.п.д. и коэффициента мощности cos Ф при изменении нагрузки в значительных пределах. Необходимы также хорошее охлаждение обмоток электродвигателя и надежный пуск компрессора во всем диапазоне рабочих температур.
С уменьшением пускового момента двигателя удлиняется процесс пуска, происходит перегрев изоляции, сокращение срока ее службы. Завышение пускового момента уменьшает к.п.д. и cos Ф двигателя и его перегрузочную способность.
Таким образом, задача подбора электродвигателя по пусковому моменту тесно связана с надежностью и экономичностью холодильной установки.
Исследования показали, что с увеличением числа цилиндров компрессора, махового момента, уменьшения степени сжатия кратность пускового момента уменьшается.
Экспериментальные данные позволяют для некоторых близких по конструкции компрессоров (герметичных, бессальниковых) установить следующее:
Эти данные могут быть распространены и на компрессоры, близкие по конструкции к испытанным.
При применении асинхронных короткозамкнутых электродвигателей, очень остро встает вопрос ограничения пусковых токов. Для ограничения пусковых токов применяются различные схемы пуска асинхронного двигателя.
При подаче на электродвигатель напряжения, в цепи статора двигателя возникают скачки тока, именуемые пусковым током или током заторможенного ротора. Пусковой ток при пуске трехфазного асинхронного двигателя может превышать в 5 – 7 раз выше номинального, хотя действует кратковременно. После окончания пуска двигателя, и выхода двигателя на номинальные обороты, ток падает до номинального, как показано на рис.
В каждом отдельном случае необходимо принимать меры, для снижения пусковых токов, используя различные способы пуска. Кроме этого необходимо принять специальные меры для стабилизации питающего напряжения.
Пусковые периоды
Рассматривая различные способы пуска трехфазного асинхронного двигателя, которые снизить пусковой ток, нужно следить за тем, чтобы период пуска не был слишком долгим. Потому что продолжительное время пуска двигателя может вызвать перегрев обмоток.
Следует знать основные достоинства и недостатки различных способов пуска трехфазного асинхронного двигателя. В данной таблице представлены сравнительные характеристики часто используемых способов пуска.

Прямой пуск
Что такое прямой пуск? Как следует из названия, прямой пуск трехфазного асинхронного двигателя означает, что электродвигатель подключается к сети на номинальное напряжение. Прямой пуск в англоязычной аббревиатуре обозначается как (direct-on-line starting – DOL). Его обычно применяют при стабильном питании двигателя, если вал двигателя жестко привязан к приводу, например привод вентилятора или насоса.
Прямой пуск трехфазного асинхронного двигателя от сети (DOL), на сегодняшний день является самым дешёвым и простым. Поэтому он получил и самое большое распространение в промышленности. Кроме того, он даёт минимальное увеличение температуры электродвигателя при пуске по сравнению со всеми другими способами пуска. Если величина пускового тока не ограничивается специальными нормами, то такой способ является наиболее предпочтительным, но не самым экономичным. Если величина пускового тока ограничена параметрами сети, то необходимо выбирать другие способы пуска. Простейшая схема управления трехфазным асинхронным двигателем M включает в себя силовой контактор KM, устройство зашиты от перегрузок QF тепловое реле KT и кнопки управления SB1, SB2.
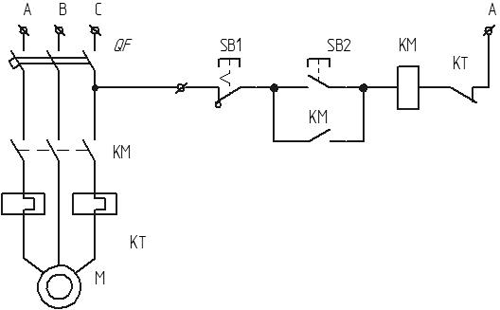
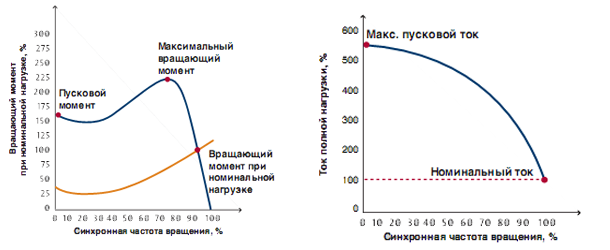
В схемах прямого пуска асинхронных двигателей пусковой момент составляет 150% -300% номинального, при этом пусковой ток может достигать 300% — 800% тока номинального.









