4-6. Az egyenáramú elektromos motor kiszámítása
A számítás villamos motorral kezdődik egyenáram, mivel a számítása egyszerűbb és világosabb, mint az elektromos motorok váltakozó áram. Az alábbiakban részletesen ismertetjük az összes kiszámított értéket, amelyet ezután az AC motorokban talál. A számítás a bipoláris elektromos motorokra vonatkozik, egymást követő gerjesztéssel.
Figyelembe véve a motor teljesítményét, sebességét, feszültségét, meghatározhatja az elektromos motor összes méretét és tekercsadatait. Az elektromos motor kiszámítása a két fő méret meghatározásával kezdődik, amelyek az armatúra átmérője és hossza. Ezeket a méreteket a következő képlet tartalmazza:
ahol D a horgony átmérője, m; l a horgony hossza, m; R i - névleges teljesítmény, W; A - az armatúra lineáris terhelése, A / m; B - mágneses indukció a légrésben, T; n - névleges forgási frekvencia, fordulatszám.
Az elektromos motor armatúrájának hosszát és átmérőjét méterben fejezzük ki, mivel a motor méreteit az indukcióval és az áramlással összekötő számítási képletek kényelmesebbek és egyszerűbbek. A különböző alkatrészek gyártásának gyakorlati célú mérőműszereiben kapott számítási eredmények könnyen átalakíthatók centiméterre vagy milliméterre.
A képlet bal oldala arányos a horgony térfogatával. Valóban, ha π-vel és 4-gyel osztjuk meg, akkor a henger térfogata lesz, amely az elektromos motor horgonya. Amint az a jobb oldali oldalról látható, az armatúra térfogata arányos a P i motor teljesítményével, és fordítottan arányos a n forgási frekvenciával. Ebből arra lehet következtetni, hogy minél nagyobb a motor forgórészének forgási gyakorisága, annál kisebb lesz a mérete azonos teljesítmény mellett. Az elektromos motor méretei és egyéb részei a horgony méretétől függenek.
Az elektromos motor névleges teljesítménye, W
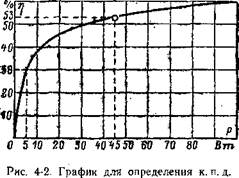
ahol E e. D. az armatúra tekercsében indukált, mágneses térben történő forgatása során; I a motor által a forrásból fogyasztott áram, A; P az elektromos motor névleges teljesítménye, W; η az elektromos motor hatékonysága, amelynek értékét az 1. ábra görbéjére lehet venni. 4-2; Amint az a görbéből látható, a hatékonysági értékek a csökkenő elektromos motor teljesítményével csökkennek.
A számított teljesítmény számértékét a (4-2) megoldással kapjuk meg, ahol az összes mennyiség értékei ismertek. A kiszámított teljesítmény mindig nagyobb, mint az elektromos motor névleges teljesítménye, mivel a villamos motor egy részét elveszíti az energia.
Az elektromos motor által fogyasztott áram, A,
ahol P a névleges teljesítmény, W; U - névleges feszültség, V; η az 1. ábra szerinti görbe mentén kifejtett hatékonyság. 4-2.
Most megadhatja és e. d. a. E, amelyre a jövőben szükség lesz:
ahol N az armatúra tekercsben lévő vezetők száma; a 2-es szorzó a nevezőben azt mutatja, hogy a teljes armatúraáram I a kollektorlemezes villákról a két tekercsvezető között, és csak az áram fele halad át az egyes vezetőkön; a termék πD az armatúra kerületét fejezi ki.
Így a lineáris terhelés megmutatja, hogy hány amper van az armatúra kerületének 1 m hosszúságában. A B lineáris A terhelést és mágneses indukciót elektromágneses terhelésnek nevezik. Megmutatják, hogy milyen nehéz az elektromos motor elektromos és mágneses értelemben. A (4-1) -ből egyértelmű, hogy minél nagyobb az AB termék, annál kisebb a horgony. Az A és B értékeknek azonban nem szabad meghaladniuk egy bizonyos határértéket, mert különben az elektromos motor nagyon meleg lesz a működés során.
Az elektromos motor fűtése azonban nem csak az elektromágneses terheléstől, hanem a működésétől is függ. Egyes villamos motorok hosszú ideig működnek anélkül, hogy megállnának például ventilátorok elektromos motorjai. Más villamos motorok időnként működnek, amikor lehűlnek, például daruk, elektromos játékosok, porszívók modelljeinek elektromos motorjai. A megszakításokkal rendelkező villanymotorok munkáját szakaszosnak nevezik. Ez azt jelenti, hogy az elektromos motor rövid ideig bekapcsol, majd megszakad, és az elektromos motor ismét bekapcsol.
Egy ilyen villanymotor befogadásának időtartamát egy bizonyos időtartam százalékában fejezzük ki, amelyet 10 percig veszünk. Például, ha az elektromos motor egy 2,5 perces időtartamra fut, és a többi idő lejár, a bekapcsolási idő 25%. Ha a motor 4 percig üzemel, akkor a bekapcsolás időtartama 40%.
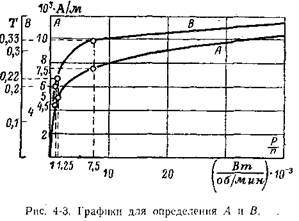
A lineáris terhelés és a mágneses indukció kiválasztása a 2. ábra szerinti görbék szerint történik. 4-3, ahol a névleges teljesítmény aránya névleges frekvencia forgatást. Az 1. ábrán A 4-3. Ábrák az A és B értékeket adják meg a hosszú működési módú elektromos motorok számára. Például, ha egy 80 W teljesítményű, 4000 fordulat / perc sebességű villamos motor teljes terhelés mellett folyamatosan működik, akkor a vízszintes tengelyen 80/4 000 = 20 10 -3 értéket helyezünk el. A függőleges vonalon az A = 9 000 A / m lineáris terhelés értékét számítjuk, és a légrés B = 0,35 T. indukcióját.
Időszakos üzemelés esetén, 25% -os bekapcsolási idővel, az elektromágneses terhelések értékei 30% -kal növelhetők, azaz 1,3-szor nagyobbak. majd
A = 9000 1,3 = 11 700 A / m,
és mágneses indukció
B = 0,35 1,3 = 0,455 T.
Jelölje l / d = e-vel. A kis elektromos motorok e értéke 0,4 és 1,6 között mozog. Ha szükséges egy kisebb, de nagyobb átmérőjű villamos motorra, akkor e = 0,4. Éppen ellenkezőleg, ha az elektromos motort kis átmérőjű csőbe kell keverni, akkor e = 1,6 értéket választunk. Ha az elektromos motor méretei nem kapcsolódnak semmilyen feltételhez, akkor általában e = 1. A bal oldali (4-1) l / D = e arány ismertetése, az egyik ismeretlen l-ből és (4-1) -ből mentesítve van:
D meghatározása: l = De. Így meghatározzák az elektromos motor fő méreteit.
Most az armatúra tekercsének kiszámításához fordulunk. Ehhez szükséges az elektromos motor mágneses fluxusának meghatározása.
Ha a légrés mágneses indukciója szorozódik azzal a területtel, amelyen keresztül az erők belépnek a horgonyba, akkor megkapjuk az elektromos motor mágneses fluxusát, amelyet görög F (phi) betűvel jelölünk:
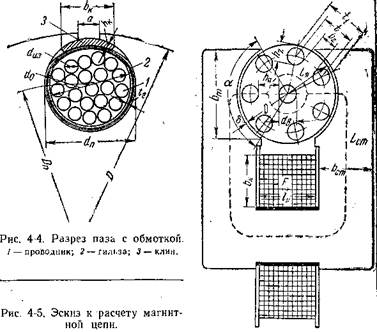
A mágneses fluxust weberben mérjük. A görög τ (tau) betű az oszloposzlopot jelenti, vagyis az armatúra kerülete egy pólusban. A bipoláris motorban a pólus felosztás τ = πD / 2. Az a (alp) görög betű azt jelzi, hogy a pólus-osztás melyik részét foglalja el a b t pólus íve (4-5. Ábra). Általában a = 0,65. Így a termék az τl adja meg a horgonyhoz képest a pólus területét.
A horgonyok hornyainak számát a Z≈3D arány határozza meg, amelyben a horgony átmérője centiméterben van kifejezve. Javasoljuk, hogy a legközelebb álljon a kapott páratlan számhoz. A horgony vezetőinek számát a képlet határozza meg
A vezetők száma egy nyílásban N z = N / Z. A számítás során kapott N z számot a legközelebbi egész számhoz kell kerekíteni, hogy a tekercselés két rétegben lehessen. A hornyok számának és a vezetők számának megválasztása a villamos motor számítási példájából egyértelmű lesz.
Az armatúra tekercsének vezeték keresztmetszetét úgy határozhatjuk meg, hogy a vezetékben lévő áramot az áram sűrűséggel osztjuk. Az áram sűrűsége azt jelzi, hogy hány amper áthalad a huzal minden négyzet milliméterén, és azt a görög A betű (delta) jelöli. Így a huzal keresztmetszete, mm 2,
A saját áramú egyenáramú motorok áramsűrűségét 6 és 12 A / mm 2 között kell kiválasztani. A nagy fordulatszámú kis motoroknál az áramsűrűség közelebb kerül a felső ajánlott értékhez. Az alacsonyabb sebességű nagyobb motorok közelebb vannak az alacsonyabb értékhez.
A vezeték e része előzetes. A táblázat második oszlopában. 4-1, meg kell találni a standard vezeték keresztmetszetét, amely a legközelebb van a számított értékhez. A táblázat első oszlopában megtaláljuk a d drótát. A szükséges átmérőjű huzal hiánya nem akadályozhatja meg az elektromos motor gyártását, mivel nagy a lehetősége a vezeték cseréjére. Először is, egy huzal helyettesíthető két vezetékkel, ha ezeknek a vezetékeknek a keresztmetszete megegyezik a cserélhető huzal keresztmetszetével. A huzal keresztmetszete az átmérő négyzetétől függ, ami azt jelenti, hogy egy 2-szer kisebb keresztmetszetű huzal esetén az átmérő 2-szer kisebb lesz. Például egy 0,29 mm átmérőjű huzal helyett két, 0,2 mm átmérőjű huzalt használhat. Ebben az esetben az áram sűrűsége szinte változatlan, de a horonyban lévő vezetékek száma 2-szeresére nő. A horony töltési sűrűsége a huzalokkal szintén növekszik, mivel mindegyik huzalnak kétrétegű szigetelése van. Az ilyen tekercselés kanyarodása nehezebb lesz. Lehetőség van egy drót két különböző átmérőjű cserére. Például 0,29 mm átmérőjű huzal helyett két huzalt lehet: egy 0,31 mm átmérőjű, a másik pedig 0,27 mm átmérőjű. Mint látható a táblázatból. 4 1, a két cserehuzal keresztmetszeteinek összege megegyezik a kicserélhető huzal keresztmetszetével:
0,075 + 0,057 = 0,132 mm2.
A d végső drótátmérő kiválasztása esetén szükséges a táblázathoz. A 4-2 szigetelt vezeték d, a szigetelés kétoldalas vastagsága:
Határozza meg a horony méretét. Az S, mm 2 horony keresztmetszetét a tekercsvezetők elhelyezéséhez a következő képlettel lehet kiszámítani:
ahol k s a rés kitöltési együtthatója, amely megmutatja, hogy a vezetők mennyire szorosan kitöltik a hornyot.
Minél kisebb a töltési tényező, annál nagyobb a horony területe. Minél nagyobb a töltési tényező, és annál vastagabb a résszigetelés, annál nehezebb a tekercselés. A saját gyártású villanymotoroknál ajánlott a 2 mm-es rovátkával szigetelni 0,2 mm vastag kartonból. A tekercselés tetején a 3 ék 0,3 mm vastag kartonból készül (4-4. Ábra) a horonyba. A számításokban a k 3 = 0,4 kitöltési tényezőt is megteheti.
Az előregyártott elektromos motorokban a hornyok összetett körte alakúak (lásd a 2-10. Ábrát), hogy több vezetőt tudjanak befogni anélkül, hogy gyengítenék a fogak vastagságát a hornyok között. Önállóan gyártott villanymotoroknál a legegyszerűbb egy fúrólyukakat fúrni egy préselt armatúra magban (4-5. Ábra).
A horony átmérőjét a keresztmetszete határozza meg:
A szomszédos hornyok közepei közötti távolság, mm
és egy fog vastagsága, mm,
A fogak vastagsága keskeny helyen legalább 2 mm legyen. Ha a számítással a fogak vastagsága kisebb, mint 2 mm, meg kell növelni az armatúra átmérőjét. A horony hornyának 1 mm-rel nagyobbnak kell lennie, mint a szigetelt vezeték átmérője.
Az alacsony feszültségű (12 V és annál alacsonyabb) elektromos motoroknál a gyűjtőlemezek számát az armatúra rések számának kell tekinteni. Az armatúra tekercselését a hornyokba és a kollektorlemezekhez való csatlakoztatását a 3. fejezet ismerteti. 5. Az S y, cm 2 szén-grafitkefe keresztmetszete a következő képlet szerint van kiválasztva:
hol? u - az áram sűrűsége az ecset alatt ,? u = 5 ÷ 8 A / cm2.
A horgony kiszámítása itt ér véget.
A mágneses rendszer és a gerjesztő tekercs kiszámításához fordulunk. Az improvizált elektromos motor esetében a legegyszerűbb módja egy nyitott típusú mágneses rendszer használata (4-5. Ábra). A számítás során először a horgony és a pólusok közötti δ légrést határozzuk meg. Az egyenáramú gépeknél a légrés méretét a képlet határozza meg
A pólusszög szöge az a = 0,65 értékkel érhető el. A kerületi fele 180 °; ezért a = 180 ° 0,65 = 117 °, 120 ° -ra kerekítve.
A mágneses áramkör méretét az ajánlott mágneses indukció alapján számítják ki. A pólusok és a keret keresztmetszetének kiszámításakor a mágneses fluxus 10% -kal nő, mivel a vonalak egy része a keret oldalai között van, kikerülve a horgonyt. Ezért a pólusok mágneses fluxusa és az F F-keret = 1,1 F.
Indukció a keretben B cikk = 0,5 T. hossz tápvezeték a vázlat által meghatározott L-es keretben (4-5. ábra). Itt a pontozott vonal a mágneses fluxus útvonalát mutatja. A következő részekből áll: két légrés, két fog, egy horgony és egy ágy. Hogy megtudja, melyik n. a. gerjesztő tekercset kell létrehoznia, ezért n. a. (Iw) mindegyik szekcióhoz, majd mindegyikük összehajtva. Kezdjük a számítást n. a. a légrésből.
Két légrés mágnesezőereje:
ahol δ a légrés a horgony egyik oldalán, m; k δ a légrés koefficiens, amely figyelembe veszi, hogy a légrés mágneses ellenállása mennyiben nő a horgok jelenléte miatt; tekinthető k δ = 1,1; B - a légrés indukciója, T.
Az n meghatározásához. a. a horgonytól fogaknak meg kell tudniuk a fogak indukcióját. A fog vastagságát (4-12) határozza meg. A mágneses fluxus az armatúra kerületének egy részén keresztül jut a fogba, amelyet a fog egy koronája és a horony egy nyílása foglal el. Ezt a t 1 fogazott osztásnak nevezik, és a képlet határozza meg
A fogban történő indukció annyiszor több lesz, mint egy légrés indukciója, hányszor a fog vastagsága kisebb, mint egy dentate osztás. Ezenkívül meg kell jegyezni, hogy a horgony hosszának egy részét szigetelő rétegek foglalják el az acél horgonyok lapjai között, amelyek körülbelül 10% -ot alkotnak. Ezért a fogban az indukció a képlettel meghatározható
Ez az indukció az asztalon. A 4-3. N kiszámításához. a. a fog magasságának kétszerese, a Hz-t meg kell szorozni a fog kettős magasságával. Tekintettel azonban arra, hogy a kerek nyílásoknál a fog felső és alsó részén az indukció csökken, a H z szorzata egy fog lw z = H z h z magasságával.
Az armatúra magában lévő indukció kiszámításakor figyelembe kell venni, hogy a mágneses fluxus elágazó, ezért csak egy rész képezi a fluxusnak csak a felét. Az armatúra mag keresztmetszete a 2. ábra szerint. A 4-5. Ábra megegyezik a horony aljától a tengellyel való távolsággal, szorozva az l armatúra hosszával:
Szükséges továbbá figyelembe venni a lemezek közötti szigetelő rétegeket is. Így az indukció az armatúra magjában
Ez az indukció az asztalon. A 4-3. Az armatúra magjának mágnesezőereje:
ahol L i a magban lévő erővonal hossza, m, az 1. ábra szerint. 4-5:
Amint az a 2. ábrán látható. 4-5. Ábrákon, ez az elektromos motor nem rendelkezik kiálló pólusokkal, amikor összeolvadt a kerettel. Ezért a mágneses áramkör rögzített részének kiszámítása az ágy kiszámításához csökken. A keret szélességét B = 0,5 T, m, adott indukció határozza meg.
A Hst indukciós térerősség a 0,5 T indukcióhoz a táblázatban található. 4-3. A keretben lévő erővonal hosszának meghatározásakor nehézséggel találkozunk, mivel a keret oldalának hossza függ a tekercs vastagságától, és még mindig nem tudjuk. Ezért a b tekercs vastagsága = 30 δ, ahol δ a légrés. A tekercs vastagsága és a rés közötti összefüggést az okozza, hogy n elsősorban a rés méretétől függ. a. tekercs, és így a tekercs mérete. Az L oszlopban lévő erővonal hosszának meghatározása esetén n. a. keret:
Most hozzáadjuk az n-et. a. minden oldal:
Ilyen n. a. tekercset kell létrehoznia, amikor a motor üresjáratban van. A terhelés alatt azonban, amikor az armatúrában lévő áram növekszik, egy demagnetizáló hatás jelenik meg. mágneses mező horgonyt. Ezért n. a. a tekercsnek valamilyen mozgásterével kell rendelkeznie, amelyet a képlettel számítanak
Így n. a. tekercsek motorterheléssel
![]()
A gerjesztő tekercsen áthalad az armatúraáram, ezért a tekercs fordulatainak száma w = Iw / I.
A vezeték keresztmetszetének meghatározásához az áramot meg kell osztani az áram sűrűséggel. Kevesebb, mint az armatúra tekercselésnél, mivel a tekercs fordulatai rögzítettek, és ennélfogva rosszabbak a hűtés.
Tekercshuzal keresztmetszete, mm 2, s = I /?
A táblázat szerint. 4-1 a legközelebbi szabványos keresztmetszetet és a drótátmérőt találjuk. Miután kiválasztotta a huzal márkáját, a lap szerint. 4-2 a szigetelt vezeték d pz átmérőjét találjuk. A tekercs vastagságának megismeréséhez meg kell ismernie a tekercs fordulatai által elfoglalt területet 2, amelyet a képlet határoz meg.
A terület elválasztása a tekercs hosszával, melyet a vázlatban l-nek jelölünk, a tekercs vastagságát kapjuk, mm,
Tehát a villamos motor névleges adatai szerint, amelyek csak három számban vannak kifejezve, képletek és táblázatok felhasználásával, meghatároztuk az elektromos motor összes méretét, amely a gyártásához szükséges. A számított elektromos motor megbízhatóan működik, és a fűtés nem hagyja el a megengedett normákat. Ez az elektromos motor kiszámításának értéke. Lehet-e „kiszámítani” ezeket a méreteket számítások nélkül? Valószínűleg a villamos motort többször kell átdolgozni ahhoz, hogy kielégítő eredményt érjünk el, miután többször több időt töltöttek ezekre a módosításokra, mint a számításra, nem is beszélve a sérült anyagról. Ezenkívül a számítási folyamat során megszerzi a technikai számítások és az elektromos autók elméletének ismeretét.
NV Vinogradov, Yu.N. Vinogradov
Hogyan kell kiszámítani és készíteni az elektromos motort
Moszkva 1974
Az elektromos motor kiválasztásának feltételei
Az elektromos motorok egyik katalógustípusának megválasztása helyesnek tekinthető az alábbi feltételek mellett:
a) az elektromos motoros munkagép (hajtás) legteljesebb megfelelése a mechanikai tulajdonságoknak. Ez azt jelenti, hogy az elektromos motornak olyan mechanikai jellemzővel kell rendelkeznie, amelynél a hajtásnak a sebesség és a gyorsulás szükséges értékeit is tájékoztatnia kell mind a működés során, mind az indításkor;
b) a motor teljesítményének maximális felhasználása a folyamatban. Az elektromos motor összes aktív részének hőmérséklete a legsúlyosabb üzemmódokban a lehető legközelebb legyen a szabványok által meghatározott fűtési hőmérséklethez, de nem haladhatja meg azt;
c) az elektromos motornak a hajtásnak való megfelelősége és a tervezési környezeti feltételek;
d) a motor megfelel az ellátási hálózat paramétereinek.
Az elektromos motor kiválasztásához a következő kezdeti adatok szükségesek: 
a) a mechanizmus neve és típusa;
b) a mechanizmus meghajtó tengelyének maximális teljesítménye, ha a működési mód folyamatos és a terhelés állandó, és más esetekben - a teljesítmény vagy az ellenállás pillanatában bekövetkező változások grafikonjai az idő függvényében;
c) a mechanizmus hajtótengelyének forgási sebessége;
d) a mechanizmus motoros tengellyel való csuklós módja (sebességváltók jelenlétében a hajtómű típusa és a sebességváltó aránya látható);
e) az indításkor fellépő nyomaték mennyisége, amelyet az elektromos motornak a mechanizmus hajtótengelyén kell biztosítania;
e) a hajtott mechanizmus sebességszabályozásának határértékei a sebességek felső és alsó értékeinek, valamint a megfelelő teljesítmény és nyomaték értékeinek megjelölésével;
g) a szükséges sebességszabályozás jellege és minősége (simasága, magassága);
h) a hajtás indításának vagy indításának gyakorisága egy órán belül; és) környezeti jellemzők.
A villamos motor kiválasztása az összes feltétel figyelembevételével a katalógus adatai alapján történik.
Széles körű használat esetén a villamos motor kiválasztása jelentősen egyszerűsödik a gyártók vonatkozó információiban szereplő adatokkal, és leáll az elektromos motor típusának meghatározása a hálózati paraméterek és a környezet jellege tekintetében.
A motor teljesítményének kiválasztása
A motor teljesítményét a munkagép terhelésének jellegétől függően kell elvégezni. Ezt a karaktert két okból értékelik: 
a) a névleges működési mód szerint;
b) a fogyasztott energia mennyiségének változása.
A következő üzemmódok vannak:
a) hosszú (hosszú), amikor a munkaidő olyan hosszú, hogy elektromos motorfűtés eléri a stabil állapotát (például szivattyúkban, öv konvejerekben, ventilátorokban stb.);
b) rövid távú, amikor a munkaidő időtartama nem elegendő ahhoz, hogy elérje az ebből a terhelésnek megfelelő villanymotor fűtési hőmérsékletét, és ezzel ellentétben a stopperek elegendőek ahhoz, hogy az elektromos motort a környezeti hőmérsékletre lehűljék. Ebben az üzemmódban az elektromos motorok különböző mechanizmusokat működtethetnek;
c) időszakos - 15, 25, 40 és 60% -os aktiválás relatív időtartama egy ciklus legfeljebb 10 percig (például darukon, néhány gépen, egykezes hegesztő motor generátoroknál stb.).
Az energiafogyasztás változása szerint a következő esetek különböznek:
a) állandó terhelés, ha az üzemelés során elfogyasztott energia mennyisége állandó vagy kisebb eltérést mutat az átlagos értéktől, például centrifugálszivattyúkhoz, ventilátorokhoz, állandó légáramú kompresszorokhoz stb .;
b) változó terhelésamikor a fogyasztott energia mennyisége rendszeresen változik, például a kotrógépek, daruk, egyes gépek stb. esetében;
c) pulzáló terhelés, amikor az elfogyasztott energia mennyisége folyamatosan változik, például a dugattyús szivattyúk, az állkapcsos törők, a képernyők stb.
Az elektromos motor teljesítményének három feltételnek kell megfelelnie:
a) normál fűtés működés közben; 
b) elegendő túlterhelési kapacitás;
c) elegendő indítónyomaték.
Minden villamos motor két fő csoportra oszlik:
a) hosszú üzemmódra (a felvétel időtartamának korlátozása nélkül);
b) időszakos használat esetén 15, 25, 40 és 60% -os átkapcsolási idővel.
Az első csoport esetében a katalógusokban és az útlevelekben a második csoport számára a folyamatos teljesítmény, amelyet az elektromos motor határozatlan ideig fejleszthet, jelzi a villamos motor által kifejlesztett erőt, megszakításokkal, határozatlan időre, bizonyos időben történő megszakítással.
Minden esetben megfelelően megválasztott villamos motornak tekinthető, amely a terheléssel, de a munkagép által beállított ütemezéssel teljes mértékben megengedi az összes alkatrész megengedett fűtését. Az úgynevezett „teljesítménykülönbségű” villamos motorok kiválasztása az ütemezés legnagyobb lehetséges terhelésén alapul, ami a villamos motor alulhasznosításához vezet, következésképpen a tőkeköltségek és a működési költségek növekedéséhez a teljesítménytényezők és a hatékonyság csökkentésével.
A motor teljesítményének túlzott emelkedése ugyancsak rázkódáshoz vezethet a gyorsulás során.
Ha a motornak hosszú ideig állandó vagy enyhén változó terheléssel kell működnie, akkor a teljesítmény meghatározása nem nehéz, és a képletek szerint történik, általában empirikus együtthatókat is beleértve.
Sokkal nehezebb választani az egyéb működési módok villamos motorjainak teljesítményét.
A rövid távú terhelést az jellemzi, hogy a befogadás időtartama rövid, és a szünetek elegendőek az elektromos motor teljes hűtéséhez. Ebben az esetben azt feltételezzük, hogy az elektromos motor terhelése a bekapcsolás időszakában állandó vagy majdnem állandó.
Annak érdekében, hogy a villamos motor ebben az üzemmódban megfelelően használható legyen, úgy kell kiválasztani, hogy a folyamatos teljesítménye (a katalógusokban feltüntetve) kisebb legyen, mint a rövid távú terhelésnek megfelelő teljesítmény, azaz, hogy az elektromos motor hőterhelése a rövid távú munkák ideje alatt.
Ha az elektromos motor üzemideje lényegesen kisebb, mint a teljes fűtéshez szükséges idő, de a bekapcsolási időszakok közötti szünet lényegesen rövidebb, mint a teljes hűtés ideje, akkor rövid távú terhelés következik be.
Gyakorlatilag megkülönböztetni kell két ilyen típusú munkát:
a) a terhelés a munkavégzés ideje alatt állandó nagyságú, következésképpen grafikonja szünetekkel váltakozó téglalapként van ábrázolva;
b) a munkaidő alatt a terhelés többé-kevésbé bonyolult jog szerint változik.
Mindkét esetben az elektromos motor kiválasztása a teljesítmény alapján mind analitikusan, mind grafikusan megoldható. Mindkét módszer meglehetősen bonyolult, ezért gyakorlatilag ajánlott egyszerűsített, azonos nagyságú módszer, amely három módszert tartalmaz:
a) átlagos négyzetáram;
b) átlagos négyzetes teljesítmény;
c) az átlagos négyzetes pillanat.
A motor mechanikus túlterhelésének ellenőrzése
Miután kiválasztotta a motor teljesítményét a fűtési körülményeknek megfelelően, ellenőrizni kell a motor mechanikus túlterhelési kapacitását, azaz győződjön meg róla, hogy a maximális terhelési nyomaték az ütemezésnek megfelelően működés közben és a nyomaték az indításkor nem haladja meg az értékeket maximális pillanat a katalógus szerint. 
Az aszinkron és szinkron elektromos motoroknál a megengedett mechanikus túlterhelés értékét a dönthető elektromágneses pillanat okozza, amikor ezek az elektromos motorok megállnak.
A névleges értékhez viszonyított maximális pillanatok sokasága 1,8 legyen a háromfázisú aszinkron villanymotoroknál, amelyek csúszógyűrűvel nem kevesebb, mint 1,65 ugyanazon rövidre záródó villamos motoroknál. A szinkronmotor maximális nyomatékának többszöri értéke sem lehet 1,65-nél alacsonyabb névleges feszültség, frekvencia és gerjesztési áram esetén, 0,9-es teljesítménytényezővel (a vezetőáramnál).
Szinte aszinkron és szinkron elektromos motorok mechanikai túlterhelhetősége 2-2,5, és néhány speciális elektromos motor esetében ez az érték 3-3,5-re emelkedik.
Az egyenáramú villamos motorok megengedett túlterhelését a munkakörülmények határozzák meg, és a GOST szerint 2-4, az alsó határ a párhuzamos villamos motorokra és a soros gerjesztéssel rendelkező villamos motorok felső határára vonatkozik.
Ha táplálja és hálózatot érzékenyek a terhelésre, akkor a mechanikus túlterhelési kapacitás ellenőrzését a hálózati feszültségveszteségek figyelembevételével kell elvégezni.
Az aszinkron rövidzárlatú és szinkron elektromos motorok esetében a kezdeti pillanatszámnak legalább 0,9-nek kell lennie (a névleges értékhez viszonyítva).
Valójában a kettős mókus ketrecben és mély horonyú motorokban a kezdeti pillanat sokasága jóval magasabb, és eléri a 2-2,4-et.
Az elektromos motor teljesítményének kiválasztásakor figyelembe kell venni, hogy az elektromos motorok fűtését befolyásolja a zárványok gyakorisága. A zárványok megengedett gyakorisága függ a normál csúszástól, a forgórész forgási pillanattól és az indítási áram arányától.
A normál típusú aszinkronmotorok 400 és 1000 közötti terhelést nem tesznek lehetővé, és a megnövekedett csúszással rendelkező elektromos motorok 1100 és 2700 között indulnak óránként. A terhelés alatti indításkor a zárványok megengedett száma jelentősen csökken.
A rövidzárlatos rotorral ellátott elektromos motor indítási árama nagy, és ez a körülmény a gyakori indításkor, és különösen a megnövekedett gyorsulási idő mellett fontos.
Ellentétben a villamos motorokkal, amelyek fázis rotorral rendelkeznek, amelyben az indítás során keletkező hő egy része reostatban, azaz a gépen kívül, rövidre záródó villamos motorokban szabadul fel, és a hő mindegyikében önmagában felszabadul, ami megnöveli a fűtést. Ezért a villamos motorok teljesítményének megválasztását a fűtés során figyelembe kell venni a számos indítás során.
Elektromos motor - Olyan mechanizmus, amely az elektromos energiát mechanikusvá alakítja. Az elektromos motor működésének elve az elektromágneses indukció törvénye. Általában egy elektromos motor rögzített részből (állórész) és rotorból (vagy horgonyból) áll, amelyben rögzített vagy forgó mágneses mezők jönnek létre. Az elektromos motorok különböző típusúak és módosítások, széles körben használatosak az emberi tevékenység számos ágában, és a mechanizmusok és hajtások egyik fő összetevője a különböző célokra. Az elektromos motor jellemzőitől függ a gyártási hatékonyság.
Ennek fő részei Elektromos motorok az állórész és a rotor. A forgórész a motor forgó része, és az állórész, amely helyhez kötött. Az elektromos motor működési elve az állórész tekercselés által létrehozott forgó mágneses tér és a zárt forgórész tekercsében található elektromos áram kölcsönhatásában következik be. Ez az eljárás elindítja a forgórész forgását a mező irányába.
Az elektromos motorok fő típusai:
Ha ilyen villamos motorokról beszélünk aszinkron elektromos motorokakkor a váltakozó áramú motorok típusára utalnak. Az ilyen motorok hasonlóak egyfázisú elektromos motorok , és két- és háromfázisú. Az aszinkron motorokban a tekercsben lévő váltakozó áram frekvenciája nem egyezik a rotor forgási gyakoriságával. Az aszinkron motor folyamatát az állórész és a forgórész mágneses mezőinek időbeli különbsége biztosítja. A forgórész forgása az állórész mezőhöz képest késleltetett. Vásároljon elektromos motort aszinkron típus olyan gépek esetében, amelyek nem igénylik a trigger mechanizmus különleges működési feltételeit.
Az elektromos motorok típusai a külső környezet védelmének mértékétől függően:
Robbanásbiztos elektromos motorok erős teste van, amely robbanás esetén a motort megakadályozza a mechanizmus többi részének legyőzését és megakadályozza a tüzet.
Védett motorok működés közben speciális szelepekkel és hálókkal zárva vannak, amelyek megvédik a mechanizmust az idegen tárgyak behatolásától. Olyan környezetben használatos, ahol nincs magas páratartalom és gázok, por, füst és vegyszerek.
Zárt villamos motorok rendelkezik egy speciális héjjal, amely nem jut be a porba, gázokba, nedvességbe és más anyagokra és elemekre, amelyek károsíthatják a motort. Az ilyen villamos motorok hermetikusak és nyomásmentesek.
alkalmazási körét frekvenciaváltók meglehetősen kiterjedt. Ezek a szerszámgépek és az ipari mechanizmusok, szállítószalagok, kipufogó szellőztető rendszerek stb. A chastotnik elve a tengely forgási szögsebességének kiszámítására vonatkozó szabály, amely olyan tényezőket foglal magában, mint a hálózati ellátás frekvenciája. Így a motor tekercsének tápellátási frekvenciájának megváltoztatásával a motor forgórészének forgási sebességét közvetlen kapcsolatban lehet szabályozni, ezáltal csökkentve az elektromos motor sebességét vagy növelve őket. Ezeket az eszközöket "invertereknek" is nevezik, köszönhetően annak a módszernek, hogy a frekvencia és a feszültség egyidejű vezérlése a konverter kimeneténél megoldható. Minden frekvenciaváltó szükségszerűen jelekkel van ellátva, amelyek jellemzői:
A legtöbb ipari frekvenciaváltó úgy van kialakítva, hogy a készülékben működjön háromfázisú hálózatok AC, azonban vannak más modellek, mint például a chastotniki egyfázisú motorokhoz.
Egy modern személy életét nehéz elképzelni anélkül, hogy ilyen mechanizmus lenne, mint egy elektromos motor. Nézzünk körül - szinte univerzális elosztást kaptak. Ma már nemcsak minden iparágban, hanem a mindennapi életben, a munkahelyi és otthoni környezetben lévő tárgyakban és eszközökben is használják őket. Hajszárítók, ventilátorok, varrógépek, építési szerszámok - ez nem teljes listája az elektromos motorokat használó eszközöknek.
Különösen biztonságos halad pontosan motorok, így széles körben használják a hajtások a fémmegmunkálás, faipari gépek és egyéb ipari gépek, a kovácssajtók, emelőgépek, felvonók, szövés, varrás, gép, ipari ventilátorok, kompresszorok, szivattyúk, centrifugák, betonkeverők . A daru villanymotorokat a tőke, az ipari és a polgári építés, a bányászat, a kohászati ipar, az energia, a közlekedés területén használják.
Metró, villamos, trolibusz - mindezek a fajták a villamos motorhoz tartoznak. Bármilyen irodát vagy lakóépületet nem lehet elképzelni légkondicionáló vagy légtisztító rendszer nélkül - elektromos motorokat is használnak. A legmodernebb berendezések üzemeltetése elektromos motor nélkül nem lehetséges, és ezért nagyban függ a mechanizmus minőségétől és megbízhatóságától. A törés nagyon szomorú eredményekhez vezethet, akár a termelés leállításáig és a hatalmas pénzügyi veszteségekig. Ezért csak olyan megbízható és megbízható szállítótól lehet beszerezni az elektromos motorokat, akik garantálják a termékminőséget.
A motor alapelve a mágnesesség hatása, amely lehetővé teszi a hatékony átalakítást elektromos energia mechanikusan. A villamos motorok különböző típusaiban az energiaátalakítás elve minden villamos motor esetében azonos, de a motorok tervezése és a forgó momentum sebességének szabályozására szolgáló módszerek eltérőek lehetnek. Mindenki ismert az iskolából legegyszerűbb példa villanymotor - amikor a keret egy állandó mágnes pólusai között forog. Természetesen az elektromos motor, amelyet ipari gépekben vagy háztartási készülékekben használnak, sokkal bonyolultabb. Vessünk egy pillantást arra, hogy egy olyan aszinkron villanymotor, amelyet az iparág leggyakrabban használ.
Az aszinkron motor működésének elve.
A működés elve indukciós motormint a többi, forgó mágneses mező használatán alapul. A mágneses tér forgási sebességét általában szinkronnak nevezik, mivel ez megfelel a mágnes forgási sebességének. A henger forgási sebességét aszinkronnak nevezik, vagyis nem egyezik meg a mágnes forgási sebességével. A henger (forgórész) forgási sebessége a mágneses tér szinkronsebességétől egy kis mennyiségben, a csúszásnak nevezik. Erőt kényszeríteni elektromos áram hozzon létre egy forgó mágneses mezőt, és a forgórész forgatásához használják általában háromfázisú áramot.
A gyűrű alakú vasgyűrűs pólusok, az elektromos motor státora, három tekercs, hálózat háromfázisú áram egymáshoz képest 120 ° -os szögben. A mag belsejében a fémhenger tengelyére van rögzítve, amit az elektromos motor forgórészének neveznek. Ha a tekercsek összekapcsolódnak és a háromfázisú áramhálózathoz csatlakoznak, akkor a három pólus által létrehozott teljes mágneses fluxus forog. A teljes mágneses fluxus egyidejűleg megváltoztatja az irányt az áramlás irányának megváltozásával az állórész tekercsekben (pólusokban). Ebben az esetben a tekercsek áramának egy időszakában a mágneses fluxus teljes fordulatot eredményez. A forgó mágneses fluxus elveszi a hengeret, és így aszinkron elektromos motort kapunk.
Az állórész tekercseit "csillag" segítségével lehet összekötni, de egy forgó mágneses mező is kialakul, ha "háromszög" -vel van összekötve. Ha kicseréljük a második és harmadik fázis tekercseit, a mágneses fluxus a forgásirányt ellenkező irányba változtatja. Ugyanez az eredmény érhető el az állórész tekercsének cseréje nélkül, de a hálózat második fázisának áramát az állórész harmadik fázisa és a harmadik szakasz az állórész második fázisa felé irányítva. Ily módon lehetőség van a mágneses tér forgásirányának megváltoztatására bármely két fázis kapcsolásával.
A modern aszinkron villanymotor állórészének kioldatlan pólusai vannak, azaz az állórész belső felülete teljesen sima. Az örvényáram-veszteségek csökkentése érdekében az állórész magot vékony préselt acéllemezekből állítják össze. Az összeszerelt állórész magot acél tokban rögzítik. Az állórész hornyaiban rézdrótot húzunk. Az elektromos motor állórészének fázistekercsét egy "csillag" vagy "háromszög" köti össze, amelyre a tekercsek kezdetei és végei megjelennek - egy speciális szigetelő pajzson. Az állórész ilyen eszköze nagyon kényelmes, mivel lehetővé teszi, hogy a tekercseket különböző standard feszültségekre kapcsolja.
Az aszinkron motor rotora, mint egy állórész, bélyegzett acéllemezekből áll. A forgórész hornyaiba tekercselés történik. A rotor kialakításától függően az aszinkron villanymotorok motorokhoz vannak osztva mókus ketrec rotor és fázis rotor. A forgórész forgórészének tekercselése réz rúdból van kialakítva, amely a rotor hornyaiba van behelyezve. A rúd végei rézgyűrűvel vannak összekötve. Ezt a tekercset mókus ketrec-tekercsnek nevezik. Ne feledje, hogy a rézrudak nem vannak szigetelve.
Az elektromos motor kiválasztásának feltételei
Az elektromos motorok egyik katalógustípusának megválasztása helyesnek tekinthető az alábbi feltételek mellett:
a) az elektromos motoros munkagép (hajtás) legteljesebb megfelelése a mechanikai tulajdonságoknak. Ez azt jelenti, hogy az elektromos motornak olyan mechanikai jellemzővel kell rendelkeznie, amelynél a hajtásnak a sebesség és a gyorsulás szükséges értékeit is tájékoztatnia kell mind a működés során, mind az indításkor;
b) a motor teljesítményének maximális felhasználása a folyamatban. Az elektromos motor összes aktív részének hőmérséklete a legsúlyosabb üzemmódokban a lehető legközelebb legyen a szabványok által meghatározott fűtési hőmérséklethez, de nem haladhatja meg azt;
c) az elektromos motornak a hajtásnak való megfelelősége és a tervezési környezeti feltételek;
d) a motor megfelel az ellátási hálózat paramétereinek.
Az elektromos motor kiválasztásához a következő kezdeti adatok szükségesek:
a) a mechanizmus neve és típusa;
b) a mechanizmus meghajtó tengelyének maximális teljesítménye, ha a működési mód folyamatos és a terhelés állandó, és más esetekben - a teljesítmény vagy az ellenállás pillanatában bekövetkező változások grafikonjai az idő függvényében;
c) a mechanizmus hajtótengelyének forgási sebessége;
d) a mechanizmus motoros tengellyel való csuklós módja (sebességváltók jelenlétében a hajtómű típusa és a sebességváltó aránya látható);
e) az indításkor fellépő nyomaték mennyisége, amelyet az elektromos motornak a mechanizmus hajtótengelyén kell biztosítania;
e) a hajtott mechanizmus sebességszabályozásának határértékei a sebességek felső és alsó értékeinek, valamint a megfelelő teljesítmény és nyomaték értékeinek megjelölésével;
g) a szükséges sebességszabályozás jellege és minősége (simasága, magassága);
h) a hajtás indításának vagy indításának gyakorisága egy órán belül; és) környezeti jellemzők.
A villamos motor kiválasztása az összes feltétel figyelembevételével a katalógus adatai alapján történik.
Széles körű használat esetén a villamos motor kiválasztása jelentősen egyszerűsödik a gyártók vonatkozó információiban szereplő adatokkal, és leáll az elektromos motor típusának meghatározása a hálózati paraméterek és a környezet jellege tekintetében.
A motor teljesítményének kiválasztása
A motor teljesítményét a munkagép terhelésének jellegétől függően kell elvégezni. Ezt a karaktert két okból értékelik:
a) a névleges működési mód szerint;
b) a fogyasztott energia mennyiségének változása.
A következő üzemmódok vannak:
a) hosszú (hosszú), amikor a munkaidő olyan hosszú, hogy elektromos motorfűtés eléri a stabil állapotát (például szivattyúkban, öv konvejerekben, ventilátorokban stb.);
b) rövid távú, amikor a munkaidő időtartama nem elegendő ahhoz, hogy elérje az ebből a terhelésnek megfelelő villanymotor fűtési hőmérsékletét, és ezzel ellentétben a stopperek elegendőek ahhoz, hogy az elektromos motort a környezeti hőmérsékletre lehűljék. Ebben az üzemmódban az elektromos motorok különböző mechanizmusokat működtethetnek;
c) időszakos - 15, 25, 40 és 60% -os aktiválás relatív időtartama egy ciklus legfeljebb 10 percig (például darukon, néhány gépen, egykezes hegesztő motor generátoroknál stb.).
Az energiafogyasztás változása szerint a következő esetek különböznek:
a) állandó terhelés, ha az üzemelés során elfogyasztott energia mennyisége állandó vagy kisebb eltérést mutat az átlagos értéktől, például centrifugálszivattyúkhoz, ventilátorokhoz, állandó légáramú kompresszorokhoz stb .;
b) változó terhelés, ha a fogyasztott energia mennyisége rendszeresen változik, például a kotrógépek, daruk, néhány gép stb. esetében;
c) pulzáló terhelés, amikor az elfogyasztott energia mennyisége folyamatosan változik, például a dugattyús szivattyúk, az állkapcsos törők, a képernyők stb.
Az elektromos motor teljesítményének három feltételnek kell megfelelnie:
a) normál fűtés működés közben;
b) elegendő túlterhelési kapacitás;
c) elegendő indítónyomaték.
Minden villamos motor két fő csoportra oszlik:
a) hosszú üzemmódra (a felvétel időtartamának korlátozása nélkül);
b) időszakos használat esetén 15, 25, 40 és 60% -os átkapcsolási idővel.
Az első csoport esetében a katalógusokban és az útlevelekben a második csoport számára a folyamatos teljesítmény, amelyet az elektromos motor határozatlan ideig fejleszthet, jelzi a villamos motor által kifejlesztett erőt, megszakításokkal, határozatlan időre, bizonyos időben történő megszakítással.
Minden esetben megfelelően megválasztott villamos motornak tekinthető, amely a terheléssel, de a munkagép által beállított ütemezéssel teljes mértékben megengedi az összes alkatrész megengedett fűtését. Az úgynevezett „teljesítménykülönbségű” villamos motorok kiválasztása az ütemezés legnagyobb lehetséges terhelésén alapul, ami a villamos motor alulhasznosításához vezet, következésképpen a tőkeköltségek és a működési költségek növekedéséhez a teljesítménytényezők és a hatékonyság csökkentésével.
A motor teljesítményének túlzott emelkedése ugyancsak rázkódáshoz vezethet a gyorsulás során.
Ha a motornak hosszú ideig állandó vagy enyhén változó terheléssel kell működnie, akkor a teljesítmény meghatározása nem nehéz, és a képletek szerint történik, általában empirikus együtthatókat is beleértve.
Sokkal nehezebb választani az egyéb működési módok villamos motorjainak teljesítményét.
A rövid távú terhelést az jellemzi, hogy a befogadás időtartama rövid, és a szünetek elegendőek az elektromos motor teljes hűtéséhez. Ebben az esetben azt feltételezzük, hogy az elektromos motor terhelése a bekapcsolás időszakában állandó vagy majdnem állandó.
Annak érdekében, hogy a villamos motor ebben az üzemmódban megfelelően használható legyen, úgy kell kiválasztani, hogy a folyamatos teljesítménye (a katalógusokban feltüntetve) kisebb legyen, mint a rövid távú terhelésnek megfelelő teljesítmény, azaz, hogy az elektromos motor hőterhelése a rövid távú munkák ideje alatt.
Ha az elektromos motor üzemideje lényegesen kisebb, mint a teljes fűtéshez szükséges idő, de a bekapcsolási időszakok közötti szünet lényegesen rövidebb, mint a teljes hűtés ideje, akkor rövid távú terhelés következik be.
Gyakorlatilag megkülönböztetni kell két ilyen típusú munkát:
a) a terhelés a munkavégzés ideje alatt állandó nagyságú, következésképpen grafikonja szünetekkel váltakozó téglalapként van ábrázolva;
b) a munkaidő alatt a terhelés többé-kevésbé bonyolult jog szerint változik.
Mindkét esetben az elektromos motor kiválasztása a teljesítmény alapján mind analitikusan, mind grafikusan megoldható. Mindkét módszer meglehetősen bonyolult, ezért gyakorlatilag ajánlott egyszerűsített, azonos nagyságú módszer, amely három módszert tartalmaz:
a) átlagos négyzetáram;
b) átlagos négyzetes teljesítmény;
c) az átlagos négyzetes pillanat.
A motor mechanikus túlterhelésének ellenőrzése
Miután kiválasztotta a motor teljesítményét a fűtési körülményeknek megfelelően, ellenőrizni kell a motor mechanikus túlterhelési kapacitását, azaz győződjön meg róla, hogy a maximális terhelési pillanat az ütemezésnek megfelelően működés közben és az indítási pillanat nem haladja meg a maximális pillanatnyi értéket a katalógusban.
Az aszinkron és szinkron elektromos motoroknál a megengedett mechanikus túlterhelés értékét a dönthető elektromágneses pillanat okozza, amikor ezek az elektromos motorok megállnak.
A névleges értékhez viszonyított maximális pillanatok sokasága 1,8 legyen a háromfázisú aszinkron villanymotoroknál, amelyek csúszógyűrűvel nem kevesebb, mint 1,65 ugyanazon rövidre záródó villamos motoroknál. A szinkronmotor maximális nyomatékának többszöri értéke sem lehet 1,65-nél alacsonyabb névleges feszültség, frekvencia és gerjesztési áram esetén, 0,9-es teljesítménytényezővel (a vezetőáramnál).
Szinte aszinkron és szinkron elektromos motorok mechanikai túlterhelhetősége 2-2,5, és néhány speciális elektromos motor esetében ez az érték 3-3,5-re emelkedik.
Az egyenáramú villamos motorok megengedett túlterhelését a munkakörülmények határozzák meg, és a GOST szerint 2-4, az alsó határ a párhuzamos villamos motorokra és a soros gerjesztéssel rendelkező villamos motorok felső határára vonatkozik.
Ha a táp- és elosztóhálózatok terhelésérzékenyek, akkor a mechanikus túlterhelési kapacitást ellenőrizni kell, figyelembe véve a hálózati feszültségveszteségeket.
Az aszinkron rövidzárlatú és szinkron elektromos motorok esetében a kezdeti pillanatszámnak legalább 0,9-nek kell lennie (a névleges értékhez viszonyítva).
Valójában a kettős mókus ketrecben és mély horonyú motorokban a kezdeti pillanat sokasága jóval magasabb, és eléri a 2-2,4-et.
Az elektromos motor teljesítményének kiválasztásakor figyelembe kell venni, hogy az elektromos motorok fűtését befolyásolja a zárványok gyakorisága. A zárványok megengedett gyakorisága függ a normál csúszástól, a forgórész forgási pillanattól és az indítási áram arányától.
A normál típusú aszinkronmotorok 400 és 1000 közötti terhelést nem tesznek lehetővé, és a megnövekedett csúszással rendelkező elektromos motorok 1100 és 2700 között indulnak óránként. A terhelés alatti indításkor a zárványok megengedett száma jelentősen csökken.
A rövidzárlatos rotorral ellátott elektromos motor indítási árama nagy, és ez a körülmény a gyakori indításkor, és különösen a megnövekedett gyorsulási idő mellett fontos.
Ellentétben a villamos motorokkal, amelyek fázis rotorral rendelkeznek, amelyben az indítás során keletkező hő egy része reostatban, azaz a gépen kívül, rövidre záródó villamos motorokban szabadul fel, és a hő mindegyikében önmagában felszabadul, ami megnöveli a fűtést. Ezért a villamos motorok teljesítményének megválasztását a fűtés során figyelembe kell venni a számos indítás során.