4-6. BEREKENING VAN DC ELEKTRISCHE MOTOR
De berekening begint met een elektromotor gelijkstroom, omdat de berekening ervan eenvoudiger en duidelijker is dan bij elektromotoren wisselstroom. Hier volgt een gedetailleerde uitleg van alle berekende waarden, die vervolgens worden gevonden in AC-motoren. De berekening wordt gegeven voor bipolaire elektromotoren met sequentiële excitatie.
Gezien het vermogen, de snelheid en de spanning van de motor, kunt u alle afmetingen en motorwikkelinggegevens bepalen. De berekening van de elektromotor begint met de bepaling van de twee hoofdafmetingen, die de diameter en lengte van het anker zijn. Deze dimensies zijn opgenomen in de formule:
waarbij D de diameter van het anker is, m; l is de lengte van het anker, m; R i - nominaal vermogen, W; A - lineaire belasting van het anker, A / m; B - magnetische inductie in de luchtspleet, T; n - nominale rotatiefrequentie, rpm.
De lengte en diameter van het anker van de elektromotor worden uitgedrukt in meters, omdat de berekeningsformules die de afmetingen van de motor verbinden met inductie en stroming handiger en eenvoudiger zijn. De in meters verkregen berekeningsresultaten voor praktische doeleinden van het vervaardigen van verschillende onderdelen kunnen eenvoudig worden omgezet in centimeters of millimeters.
De linkerkant van de formule is evenredig met het volume van het anker. Inderdaad, als je het vermenigvuldigt met π en deelt door 4, krijg je het volume van de cilinder, dat is het anker van de elektromotor. Zoals aan de rechterzijde van de formule te zien is, is het volume van het anker evenredig met het vermogen van de motor Pi en omgekeerd evenredig met de rotatiefrequentie n. Hieruit kan worden geconcludeerd dat hoe groter de rotatiefrequentie van het anker van de motor, des te kleiner de afmetingen zijn bij hetzelfde vermogen. En de afmetingen en andere delen van de elektromotor zijn afhankelijk van de afmetingen van het anker.
Nominaal vermogen van de elektromotor, W
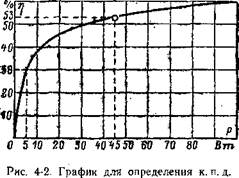
waar E is e. D. s. Geïnduceerd in de ankerwikkeling tijdens zijn rotatie in een magnetisch veld, V; I is de stroom verbruikt door de motor van de bron, A; P is het nominale vermogen van de elektromotor, W; η is het rendement van de elektrische motor, waarvan de waarde langs de curve van afb. 4-2; Zoals uit de curve blijkt, nemen de rendementswaarden af met afnemende elektrische motorvermogen.
De numerieke waarde van het berekende vermogen wordt verkregen door op te lossen (4-2), waarbij de waarden van alle hoeveelheden bekend zijn. Het berekende vermogen is altijd groter dan het nominale vermogen van de elektromotor, omdat een deel van de toegevoerde energie verloren gaat in de elektromotor zelf.
De stroom verbruikt door de elektromotor, A,
waarbij P het nominale vermogen is, W; U - nominale spanning, V; η is de efficiëntie langs de curve in afb. 4-2.
Nu kunt u definiëren en e. d. a. E, die in de toekomst nodig zal zijn:
waarbij N het aantal geleiders in de ankerwikkeling is; vermenigvuldiger 2 in de noemer laat zien dat de totale ankerstroom I van de collectorplaat zich voortbeweegt tussen de twee geleiders van de wikkeling en slechts de helft van de stroom door elke geleider gaat; het product πD geeft de omtrek van het anker weer.
De lineaire belasting toont dus hoeveel ampères per lengte van 1 m van de armatuuromtrek. Lineaire belasting A en magnetische inductie in de luchtspleet B worden elektromagnetische belastingen genoemd. Ze laten zien hoe sterk de elektromotor wordt geladen in een elektrische en magnetische relatie. Uit (4-1) is het duidelijk dat hoe groter het product AB, hoe kleiner het anker zal zijn. Maar de waarden van A en B mogen een bepaalde limiet niet overschrijden, omdat anders de elektromotor tijdens bedrijf zeer heet zal zijn.
De verwarming van de elektromotor is echter niet alleen afhankelijk van elektromagnetische belastingen, maar ook van het tijdstip waarop deze wordt gebruikt. Sommige elektromotoren werken lang zonder de elektrische motoren van ventilatoren te stoppen. Andere elektromotoren werken met tussenpozen waarbij ze afkoelen, bijvoorbeeld elektrische motoren van modellen van kranen, elektrische spelers, stofzuigers. Het werk van elektromotoren met onderbrekingen wordt intermitterend genoemd. Dit betekent dat de motor een korte tijd aan gaat, dan breekt er een onderbreking en schakelt de motor weer in.
De duur van de opname van een dergelijke elektromotor wordt uitgedrukt als een percentage van een bepaalde periode, die gedurende 10 minuten wordt genomen. Als de elektromotor bijvoorbeeld gedurende een periode van 2,5 minuten werkt en de rest van de tijd is verstreken, is de inschakeltijd 25%. Als de motor 4 minuten loopt, is de duur van de opname 40%.
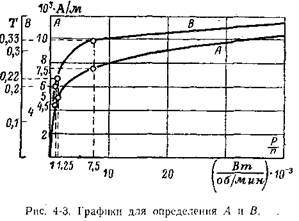
De keuze van lineaire belasting en magnetische inductie wordt gemaakt volgens de krommen van Fig. 4-3, waarbij de verhouding van het nominale vermogen tot nominale frequentie rotatie. In Fig. 4-3 krijgen de waarden van A en B voor elektromotoren met een lange bedrijfsmodus. Als een elektrische motor met een vermogen van 80 W bij een toerental van 4000 tpm continu werkt bij volledige belasting, dan plaatsen we op de horizontale as de waarde 80/4 000 = 20 10 -3. Op de verticale lijn tellen we de waarde van de lineaire belasting A = 9 000 A / m en inductie in de luchtspleet B = 0,35 T.
Bij intermitterende werking met een inschakeltijd van 25%, kunnen de waarden van elektromagnetische belastingen met 30% worden verhoogd, d.w.z. ze 1,3 keer zo groot worden. dan
A = 9000 1.3 = 11 700 A / m,
en magnetische inductie
B = 0,35 1,3 = 0,455 T.
Aanwijzing door l / D = e. De e-waarde voor kleine elektromotoren varieert van 0,4 tot 1,6. Als het nodig is om een elektromotor met een kleinere lengte te verkrijgen, maar met een grotere diameter, dan nemen we e = 0,4. Integendeel, als de elektromotor in een pijp met een kleine diameter moet worden gemengd, kiezen we voor e = 1,6. Als de afmetingen van de elektromotor niet gerelateerd zijn aan enige omstandigheden, neem dan meestal e = 1. Introductie van de verhouding l / D = e in het linkerdeel (4-1), bevrijd van een onbekende l en (4-1) heeft de vorm:
Door D te definiëren, vinden we l = De. Aldus worden de hoofdafmetingen van de elektromotor bepaald.
We gaan nu in op de berekening van de ankerwikkeling. Hiervoor is het noodzakelijk om de magnetische flux van de elektromotor te bepalen.
Als de magnetische inductie in de luchtspleet wordt vermenigvuldigd met het gebied waardoor de krachtlijnen het anker binnendringen, verkrijgen we de magnetische flux van de elektromotor, die we aanduiden met de Griekse letter F (phi):
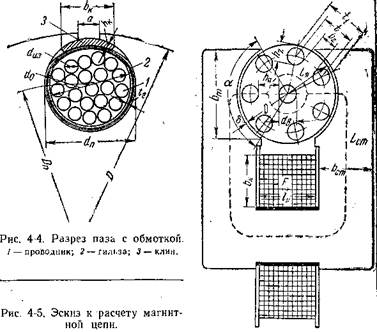
Magnetische flux wordt gemeten in weber. De Griekse letter τ (tau) geeft poolverdeling aan, d.w.z. het deel van de armatuuromtrek op één pool. In een bipolaire motor is de poolverdeling τ = πD / 2. De Griekse letter a (alpha) geeft aan welk deel van de poolverdeling wordt ingenomen door de boog van de pool b t (figuur 4-5). Neem meestal a = 0.65. Zo geeft het product het gebied van de paal naar het anker toe.
Het aantal groeven van het anker wordt bepaald uit de verhouding Z3D, waarin de diameter van het anker wordt uitgedrukt in centimeters. Het wordt aanbevolen het dichtst bij het ontvangen oneven nummer te komen. Het aantal geleiders van het anker wordt bepaald door de formule
Het aantal geleiders in één slot Nz = N / Z. Het bij de berekening verkregen aantal N z moet worden afgerond op het dichtstbijzijnde gehele even getal, zodat de wikkeling in twee lagen kan worden gewonden. De keuze van het aantal groeven en het aantal geleiders zal duidelijk zijn uit het numerieke voorbeeld van de berekening van de elektromotor.
De draadgrootte voor de ankerwikkeling kan worden bepaald door de stroom in de geleider te delen door de stroomdichtheid. De stroomdichtheid geeft aan hoeveel ampères door elke vierkante millimeter van de draad gaan en wordt aangeduid met de Griekse letter A (delta). Dus de doorsnede van de draad, mm 2,
De stroomdichtheid voor zelfgemaakte DC-motoren moet worden gekozen van 6 tot 12 A / mm 2. Voor kleine motoren met een hoge rotatiefrequentie wordt de stroomdichtheid dichter bij de aanbevolen bovenwaarde genomen. Grotere motoren met lagere snelheden liggen dichter bij de lagere waarde.
Dit gedeelte van de draad is voorlopig. In de tweede kolom van de tabel. 4-1, moet u de dwarsdoorsnede van de standaarddraad vinden die het dichtst bij de berekende kabel komt. In de eerste kolom van deze tabel vinden we de draaddiameter d. Het ontbreken van draden met de vereiste diameter kan de vervaardiging van de elektromotor niet voorkomen, omdat er grote mogelijkheden zijn om de draad te vervangen. Allereerst kan één draad worden vervangen door twee draden, als de doorsnede van deze draden dezelfde is als die van de te vervangen draad. De doorsnede van de draad is afhankelijk van het kwadraat van de diameter, wat betekent dat voor een draad met een doorsnede die 2 keer kleiner is, de diameter √ 2 keer kleiner is. In plaats van een draad met een diameter van 0,29 mm, kunt u bijvoorbeeld twee draden nemen met een diameter van 0,2 mm. In dit geval is de stroomdichtheid bijna ongewijzigd, maar het aantal draden in de groef neemt met 2 keer toe. De dichtheid van het vullen van de groef met draden zal ook toenemen, omdat elke draad een tweelagige isolatie heeft. Het wikkelen van een dergelijke bocht zal moeilijker zijn. Het is mogelijk om één draad te vervangen door twee met verschillende diameters. In plaats van een draad met een diameter van 0,29 mm, kunt u bijvoorbeeld twee draden nemen: een met een diameter van 0,31 mm en de andere met een diameter van 0,27 mm. Zoals te zien is in de tabel. 4 1, is de som van de dwarsdoorsneden van de twee vervangingsdraden gelijk aan de doorsnede van de draad die wordt vervangen:
0,075 + 0,057 = 0,132 mm2.
Het kiezen van de uiteindelijke draaddiameter d, het is noodzakelijk voor de tafel. 4-2 bepaal de diameter geïsoleerde draad d van, tweezijdige dikte δ van isolatie toevoegen:
Bepaal de grootte van de groef. De dwarsdoorsnede van de groef S, mm 2, vereist voor plaatsing van de wikkelgeleiders, kan worden berekend met de formule:
waarbij ks de slotvulcoëfficiënt is, die aangeeft hoe strak de geleiders de groef vullen.
Hoe kleiner de vulfactor, des te groter moet het oppervlak van de groef zijn. Hoe groter de vulfactor en hoe dikker de gleufisolatie, hoe moeilijker het is om de wikkeling op te winden. Bij zelf gemaakte elektromotoren wordt aanbevolen om te isoleren met een keepmof 2 van een 0,2 mm dik karton. Bovenop de wikkeling is een wig 3 gemaakt van 0,3 mm dik karton (fig. 4-4) in de groef. In de berekeningen kunt u de vulfactor k 3 = 0,4 nemen.
In geprefabriceerde elektromotoren hebben de groeven een complexe peervormige vorm (zie afb. 2-10), zodat ze meer geleiders kunnen bevatten zonder de dikte van de tanden tussen de groeven te verzwakken. Bij zelf gemaakte elektromotoren is het het eenvoudigst om ronde groeven in een samengedrukte armatuurkern te boren (fig. 4-5).
De diameter van de groef wordt bepaald door de doorsnede:
De afstand tussen de middelpunten van aangrenzende groeven, mm
en dikte van een tand, mm,
De dikte van de tand op een smalle plaats moet minimaal 2 mm zijn. Als, door berekening, de dikte van de tand minder dan 2 mm is, is het noodzakelijk om de diameter van het anker te vergroten. De sleuf van de groef moet 1 mm groter zijn dan de diameter van de geïsoleerde draad.
Het aantal collectorplaten in elektromotoren voor laagspanning (12 V en lager) is gelijk aan het aantal ankersleuven. Het leggen van de ankerwikkeling in de groeven en het verbinden daarvan met de collectorplaten worden beschreven in Hoofdstuk. 5. De doorsnede van de koolstof-grafietborstel S y, cm 2, wordt geselecteerd door de formule:
waar? u - huidige dichtheid onder de borstel ,? u = 5 ÷ 8 A / cm 2.
De berekening van het anker eindigt hier.
We wenden ons tot de berekening van het magnetisch systeem en de bekrachtigingswikkeling. Voor een geïmproviseerde elektromotor is de eenvoudigste manier om een magnetisch open systeem te gebruiken (Figuur 4-5). In de berekening wordt allereerst de luchtspleet δ tussen het anker en de polen bepaald. In DC-machines wordt de grootte van de luchtspleet bepaald door de formule
De hoek van de poolboog kan worden gevonden door de waarde van a = 0,65. De helft van de omtrek is 180 °; daarom a = 180 ° 0,65 = 117 °, afgerond tot 120 °.
De grootte van het magnetische circuit wordt berekend volgens de aanbevolen magnetische inductie in zijn gebieden. Bij het berekenen van de doorsnede van de polen en het frame, neemt de magnetische flux met 10% toe, omdat sommige lijnen tussen de zijkanten van het frame sluiten, waarbij het anker wordt omzeild. Daarom zijn de magnetische flux van de polen en het frame F-artikel = 1,1 F.
Inductie in het frame neemt B-artikel = 0,5 T. Lengte stroomlijn in het frame L st bepaald door de schets (Fig. 4-5). Hier toont de stippellijn het magnetische fluxpad. Het bestaat uit de volgende secties: twee luchtspleten, twee tanden, een anker en een bed. Om uit te vinden welke n. a. zou een excitatiespoel moeten maken, het is noodzakelijk om n te berekenen. a. (IW) voor elk van deze secties en vervolgens allemaal gevouwen. Laten we de berekening beginnen n. a. vanuit de luchtopening.
Magnetiserende kracht van twee luchtspleten:
waarbij δ de luchtspleet aan één kant van het anker is, m; k δ is de luchtspleetcoëfficiënt die rekening houdt met hoeveel de magnetische weerstand van de luchtspleet toeneemt als gevolg van de aanwezigheid van groeven in het anker; we kunnen aannemen dat k δ = 1,1; B - inductie in de luchtspleet, T.
Om n te bepalen. a. de tanden van het anker moeten de inductie in de tand kennen. De dikte van de tand wordt bepaald door (4-12). De magnetische flux komt de tand binnen via een deel van de armatuuromtrek, die wordt bezet door een kroon van de tand en een sleuf van de groef. Het wordt de getande divisie van t 1 genoemd en wordt bepaald door de formule
Inductie in een tand zal zo vaak meer zijn dan inductie in een luchtspleet, hoeveel keer de dikte van een tand minder is dan een dentaatafdeling. Bovendien moet worden opgemerkt dat een deel van de lengte van het anker wordt ingenomen door isolatielagen tussen de vellen van stalen ankers, die ongeveer 10% vormen. Daarom kan de inductie in de tand worden bepaald door de formule
Deze inductie op de tafel. 4-3 komt overeen met de veldsterkte Hz. Om n te berekenen. a. twee keer de hoogte van de tand, is het noodzakelijk om Hz te vermenigvuldigen met de dubbele hoogte van de tand. Omdat bij ronde gleuven de inductie in de bovenste en onderste delen van de tand afneemt, vermenigvuldigt u Hz met de hoogte van één tand lw z = H z hz.
Bij het berekenen van de inductie in de ankerkern moet er rekening mee worden gehouden dat de magnetische flux erin vertakt is, en daarom wordt slechts de ene helft van de flux door één sectie bepaald. Dwarsdoorsnede van de ankerkern volgens fig. 4-5 is gelijk aan de afstand van de basis van de groef tot de schacht, vermenigvuldigd met de lengte van het anker l:
Het is ook noodzakelijk om rekening te houden met de isolerende lagen tussen de vellen. Aldus inductie in de ankerkern
Deze inductie op de tafel. 4-3 komt overeen met H i. De magnetiserende kracht van de armatuurkern:
waarbij Li de lengte is van de krachtlijn in de kern, m, volgens Fig. 4-5:
Zoals te zien in fig. 4-5, deze elektromotor heeft geen uitstekende palen, omdat deze zijn samengevoegd met het frame. Daarom wordt de berekening van het vaste deel van het magnetische circuit gereduceerd tot de berekening van het bed. De breedte van het frame wordt bepaald door de gegeven inductie B = 0,5 T, m,
De veldsterkte Hst voor inductie 0,5 T is te vinden in tabel. 4-3. Bij het bepalen van de lengte van de krachtlijn in het frame ondervinden we moeilijkheden, omdat de lengte van de zijkant van het frame afhankelijk is van de dikte van de spoel en we weten het nog steeds niet. Daarom nemen we de dikte van de spoel b tot = 30 δ, waarbij δ de luchtspleet is. De relatie tussen de spoeldikte en de spleet is te wijten aan het feit dat n hoofdzakelijk afhankelijk is van de grootte van de spleet. a. spoel, en dus de grootte van de spoel. Bepaal de lengte van de krachtlijn in het frame L st, u kunt n berekenen. a. kader:
Nu voegen we n toe. a. alle sites:
Zo'n n. a. moet een spoel creëren wanneer de motor stationair draait. Maar als de stroom in het anker onder belasting toeneemt, zal er een demagnetiserend effect optreden. magnetisch veld anker. Daarom n. a. de spoel moet enige marge hebben, die wordt berekend met de formule
Dus, n. a. spoelen met motorbelasting
![]()
Een ankerstroom zal door de excitatiespoel gaan en daarom zal het aantal windingen van de spoel w = Iw / I zijn.
Om de doorsnede van de draad te bepalen, moet de stroom worden gedeeld door de stroomdichtheid. Het wordt minder genomen dan voor de ankerwikkeling, omdat de windingen van de spoel zijn gefixeerd en daarom slechter zijn afgekoeld.
Spoeldraaddoorsnede, mm 2, s = I /?.
Volgens de tabel. 4-1 vinden we de dichtstbijzijnde standaard doorsnede en draaddiameter. Het merk van een draad gekozen hebben, volgens tab. 4-2 vinden we de diameter van de geïsoleerde draad d pz. Om de dikte van de spoel te achterhalen, moet u het gebied, mm 2, kennen dat bezet is door de windingen van de spoel, wat kan worden bepaald door de formule
Door het gebied te delen door de lengte van de spoel, die in de schets is aangeduid met l, krijgen we de dikte van de spoel, mm,
Dus volgens de nominale gegevens van de elektromotor, die in slechts drie getallen worden uitgedrukt, met behulp van formules en tabellen, hebben we alle dimensies van de elektromotor bepaald die nodig zijn voor de fabricage ervan. De berekende elektromotor werkt betrouwbaar en de verwarming zal de toegestane normen niet verlaten. Dit is de waarde van de berekening van de elektromotor. Zou het mogelijk zijn om al deze dimensies zonder berekeningen te "raden"? Waarschijnlijk zal de elektromotor meerdere keren moeten worden vernieuwd om een bevredigend resultaat te verkrijgen, omdat deze meerdere malen meer tijd heeft besteed aan deze wijzigingen dan aan de berekening, om nog maar te zwijgen van de beschadigde materialen. Bovendien, tijdens het berekenen, ontvangt u een vaardigheid in technische berekeningen en kennis van de theorie van elektrische auto's.
NV Vinogradov, Yu.N. Vinogradov
Hoe de elektrische motor te berekenen en te maken
Moskou 1974
Voorwaarden voor het selecteren van een elektromotor
De keuze van een van de catalogustypen elektrische motoren wordt als correct beschouwd onder de volgende voorwaarden:
a) de meest volledige overeenstemming van de werkende machine van de elektrische motor (aandrijving) met de mechanische eigenschappen. Dit betekent dat de elektromotor een dergelijk mechanisch kenmerk moet hebben, waarin het de aandrijving de noodzakelijke waarden van snelheid en versnelling kan meedelen, zowel tijdens het gebruik als aan het begin van de koers;
b) het maximale gebruik van motorvermogen in het proces. De temperatuur van alle actieve delen van de elektromotor in de zwaarste bedrijfsmodi moet zo dicht mogelijk bij de verwarmingstemperatuur liggen die door de normen wordt bepaald, maar mag deze niet overschrijden;
c) overeenstemming van de elektromotor met de aandrijving en omgevingscondities in termen van het ontwerp;
d) overeenstemming van de motor met de parameters van zijn voedingsnetwerk.
De volgende initiële gegevens zijn nodig voor de keuze van de elektromotor: 
a) de naam en het type mechanisme;
b) het maximale vermogen op de aandrijfas van het mechanisme, als de werkingsmodus continu is en de belasting constant is, en in andere gevallen - grafieken van veranderingen in vermogen of moment van weerstand als een functie van tijd;
c) de rotatiesnelheid van de aandrijfas van het mechanisme;
d) de wijze van koppeling van het mechanisme met de motoras (in de aanwezigheid van tandwielen, het type versnelling en overbrengingsverhouding zijn aangegeven);
e) de hoeveelheid koppel bij het opstarten, die de elektromotor moet leveren op de aandrijfas van het mechanisme;
e) de grenzen van de snelheidsregeling van het aangedreven mechanisme met aanduiding van de bovenste en onderste waarden van de snelheden en de overeenkomstige waarden van vermogen en koppel;
g) de aard en kwaliteit (zachtheid, hoogte) van de vereiste snelheidsregeling;
h) de frequentie van starten of starten van de rit binnen een uur; en) milieukenmerken.
De keuze van een elektromotor gebaseerd op het rekening houden met alle condities geschiedt volgens catalogusgegevens.
Voor brede mechanismen wordt de keuze van een elektromotor aanzienlijk vereenvoudigd door de gegevens in de relevante informatie van de fabrikanten en wordt deze beperkt tot het verduidelijken van het type elektromotor met betrekking tot netwerkparameters en de aard van de omgeving.
Selectie van motorvermogen
De keuze van motorvermogen moet worden gemaakt in overeenstemming met de aard van de belastingen van de werkende machine. Dit personage wordt op twee gronden beoordeeld: 
a) volgens de nominale bedrijfsmodus;
b) veranderingen in de hoeveelheid verbruikt vermogen.
Er zijn de volgende werkingsmodi:
a) lang (lang) wanneer de werkperiode zo lang is dat elektrische motor verwarming de steady-state-waarde bereikt (bijvoorbeeld in pompen, transportbanden, ventilatoren, enz.);
b) op korte termijn, wanneer de duur van de werkperiode onvoldoende is om de temperatuur van verwarming door de elektromotor overeenkomend met de gegeven belasting te bereiken, en de stopperioden daarentegen volstaan om de elektrische motor tot de omgevingstemperatuur te koelen. In deze modus kunnen elektrische motoren verschillende mechanismen bedienen;
c) met tussenpozen - met een relatieve activeringsduur van 15, 25, 40 en 60% met een duur van één cyclus van niet meer dan 10 minuten (bijvoorbeeld in kranen, sommige machines, generatoren voor lasmotoren met één operator, enz.).
Volgens de wijzigingen in het stroomverbruik, verschillen de volgende gevallen:
a) constante belasting, wanneer de hoeveelheid stroom die wordt verbruikt tijdens bedrijf constant is of kleine afwijkingen heeft van de gemiddelde waarde, zoals bijvoorbeeld voor centrifugaalpompen, ventilatoren, compressoren met constante luchtstroom, enz.;
b) variabele belastingwanneer de hoeveelheid verbruikt vermogen periodiek verandert, zoals bijvoorbeeld in graafmachines, kranen, sommige machines, enz .;
c) pulserende belasting, wanneer de hoeveelheid verbruikt vermogen continu verandert, zoals bijvoorbeeld in zuigerpompen, kaakbrekers, zeven, enz.
Het vermogen van de elektromotor moet aan drie voorwaarden voldoen:
a) normale verwarming tijdens bedrijf; 
b) voldoende overbelastingscapaciteit;
c) voldoende startkoppel.
Alle elektromotoren zijn onderverdeeld in twee hoofdgroepen:
a) voor een lange werkingswijze (zonder de duur van de opname te beperken);
b) voor intermitterende werking met schakeltijden van 15, 25, 40 en 60%.
Voor de eerste groep, in catalogi en paspoorten, is de continue kracht die de elektromotor onbeperkt kan ontwikkelen, voor de tweede groep, het vermogen dat de elektromotor kan ontwikkelen, het werken met onderbrekingen voor een oneindig lange tijd met een bepaalde inschakeltijd.
Correct geselecteerd in alle gevallen wordt beschouwd als een dergelijke elektromotor, die, werkend met de belasting, maar het schema ingesteld door de werkende machine, de volledige toegestane verwarming van alle onderdelen bereikt. De keuze van elektromotoren met de zogenaamde "vermogensmarge", gebaseerd op de grootst mogelijke belasting van het schema, leidt tot een onderbenutting van de elektromotor en dientengevolge tot een toename van kapitaalkosten en bedrijfskosten door het verminderen van vermogensfactoren en efficiëntie.
Een overmatige toename van het motorvermogen kan ook leiden tot schokken tijdens het accelereren.
Als de motor lange tijd moet werken met een constante of enigszins variërende belasting, dan is het bepalen van het vermogen niet moeilijk en gebeurt volgens de formules, meestal inclusief empirische coëfficiënten.
Het is veel moeilijker om de kracht van elektromotoren van andere bedrijfsmodi te kiezen.
Kortstondige belasting wordt gekenmerkt door het feit dat de perioden van opname kort zijn en pauzes voldoende zijn voor volledige koeling van de elektromotor. In dit geval wordt aangenomen dat de belasting van de elektromotor constant wordt gehouden of bijna constant gedurende perioden van inschakelen.
Om ervoor te zorgen dat de elektromotor op de juiste wijze wordt gebruikt voor verwarming in deze modus, is het noodzakelijk deze zo te kiezen dat zijn continu vermogen (aangegeven in de catalogi) minder is dan het vermogen dat overeenkomt met de belasting op korte termijn, d.w.z. dat de elektromotor een thermische overbelasting heeft gedurende de perioden van zijn werking op korte termijn.
Als de werkingsperiodes van de elektromotor beduidend minder zijn dan de tijd die nodig is voor de volledige verwarming, maar de pauze tussen de perioden van inschakelen aanzienlijk korter is dan de tijd van volledige koeling, treedt een kortstondige belasting op.
Praktisch gezien zou men een onderscheid moeten maken tussen twee soorten van dergelijk werk:
a) de belasting tijdens de werkperiode is constant van omvang en dientengevolge wordt de grafiek ervan weergegeven als rechthoeken afgewisseld met pauzes;
b) de belasting tijdens de werkperiode varieert volgens een min of meer gecompliceerde wet.
In beide gevallen kan het probleem van het kiezen van een elektrische motor door vermogen zowel analytisch als grafisch worden opgelost. Beide methoden zijn nogal gecompliceerd, daarom is een vereenvoudigde methode van equivalente grootte praktisch aan te raden, die drie methoden omvat:
a) gemiddelde blokstroom;
b) gemiddeld vierkant vermogen;
c) het gemiddelde vierkante moment.
Controle van de mechanische overbelastingscapaciteit van de motor
Na het selecteren van het motorvermogen volgens de verwarmingsomstandigheden, is het noodzakelijk om de mechanische overbelastingscapaciteit van de motor te controleren, d.w.z. ervoor te zorgen dat het maximale belastingsmoment volgens het schema tijdens bedrijf en het koppel bij het starten de waarden niet zal overschrijden maximale moment volgens de catalogus. 
In asynchrone en synchrone elektromotoren wordt de waarde van de toegestane mechanische overbelasting veroorzaakt door hun kantelende elektromagnetische moment, bij het bereiken waar deze elektromotoren stoppen.
Het aantal maximale momenten ten opzichte van de nominale waarde moet 1,8 zijn voor driefasige asynchrone elektromotoren met sleepringen van niet minder dan 1,65 voor dezelfde kortgesloten elektromotoren. Het veelvoud van het maximumkoppel van een synchrone motor mag ook niet lager zijn dan 1,65 bij nominale spanningen, frequentie en bekrachtigingsstroom, met een arbeidsfactor van 0,9 (bij voorloopstroom).
Bijna asynchrone en synchrone elektromotoren hebben een mechanische overbelastingscapaciteit van maximaal 2-2,5, en voor sommige speciale elektromotoren stijgt deze waarde naar 3-3.5.
De toegestane overbelasting van elektromotoren met gelijkstroom wordt bepaald door de werkomstandigheden en volgens GOST is van 2 tot 4, de ondergrens geldt voor elektromotoren met parallel, en de bovengrens voor elektromotoren met seriebekrachtiging.
Als voedend en distributienetwerk zijn gevoelig voor de belasting, dan moet de controle van de mechanische overbelastingscapaciteit worden gemaakt rekening houdend met de spanningsverliezen in de netwerken.
Voor asynchrone kortgesloten en synchrone elektrische motoren moet de veelvoud van het aanvangsmoment ten minste 0,9 zijn (ten opzichte van de nominale waarde).
In feite is het veelvoud van het initiële moment in elektrische motoren met een dubbele eekhoornkooi en met een diepe groef veel hoger en bereikt het 2-2.4.
Bij het kiezen van het vermogen van de elektromotor moet in gedachten worden gehouden dat de verwarming van de elektromotoren wordt beïnvloed door de frequentie van insluitsels. De toelaatbare frequentie van insluitsels hangt af van de normale slip, het zwaaimoment van de rotor en de startstroomverhouding.
Asynchrone motoren van normale typen laten geen belasting toe van 400 tot 1000, en elektromotoren met verhoogde slip - van 1100 tot 2700 starts per uur. Bij het starten onder belasting wordt het toegestane aantal insluitsels aanzienlijk verminderd.
De startstroom van een elektromotor met een eekhoorn-kooi rotor heeft een grote waarde, en deze omstandigheid in omstandigheden van frequente start, en in het bijzonder met een verhoogde versnellingstijd, is belangrijk.
In tegenstelling tot elektromotoren met een faserotor, waarbij een deel van de bij het opstarten opgewekte warmte wordt vrijgegeven in een regelweerstand, d.w.z. buiten de machine, in kortgesloten elektromotoren, komt alle warmte vrij in de machine zelf, die zijn verhoogde verwarming veroorzaakt. Daarom moet bij de keuze van het vermogen van deze elektromotoren rekening worden gehouden met de verwarming tijdens talrijke starts.
Elektrische motor - Het is een mechanisme dat dient om elektrische energie om te zetten in mechanisch. Het principe van de werking van een elektromotor is de wet van elektromagnetische inductie. Gewoonlijk bestaat een elektromotor uit een vast onderdeel (stator) en een rotor (of anker), waarin vaste of roterende magnetische velden worden gecreëerd. Elektrische motoren zijn van verschillende typen en modificaties, worden op grote schaal gebruikt in vele takken van menselijke activiteit en vertegenwoordigen een van de hoofdcomponenten in de mechanismen en aandrijvingen voor verschillende doeleinden. Van de kenmerken van de elektromotor is direct afhankelijk van de productie-efficiëntie.
De belangrijkste onderdelen daarvan bestaat Elektromotoren zijn stator en rotor. De rotor is het deel van de motor dat draait en de stator - die stationair blijft. Het werkingsprincipe van de elektromotor wordt geconcludeerd in de interactie van een roterend magnetisch veld gecreëerd door de statorwikkeling en de elektrische stroom, die zich bevindt in de gesloten rotorwikkeling. Dit proces initieert de rotatie van de rotor in de richting van het veld.
Hoofdtypen van elektrische motoren:
Als we praten over dergelijke elektrische motoren als asynchrone elektrische motorendan verwijzen ze naar het soort motoren van wisselstroom. Zulke motoren zijn als eenfasige elektromotoren en twee- en driefasen. In asynchrone motoren valt de frequentie van de wisselstroom in de wikkeling niet samen met de rotatiefrequentie van de rotor. Het proces van de asynchrone motor wordt geleverd door het tijdverschil van de opwekking van de magnetische velden van de stator en de rotor. Rotatie van de rotor als gevolg hiervan is vertraagd ten opzichte van het statorveld. Koop een elektromotor asynchroon type mogelijk voor machines die geen speciale werkomstandigheden van het triggermechanisme vereisen.
Typen elektromotoren volgens de mate van bescherming tegen de externe omgeving:
Explosiebestendige elektrische motoren hebben een robuuste behuizing, die, als een explosie optreedt de motor, het verslaan van alle andere delen van het mechanisme voorkomt en het optreden van een brand voorkomt.
Beschermde motoren tijdens bedrijf worden ze afgesloten met speciale kleppen en netten die het mechanisme beschermen tegen het binnendringen van vreemde voorwerpen. Gebruikt in een omgeving waar er geen hoge luchtvochtigheid en onzuiverheden van gassen, stof, rook en chemicaliën zijn.
Gesloten elektromotoren een speciale schaal hebben die geen stof, gassen, vocht en andere stoffen en elementen binnendringt die schade aan het motormechanisme kunnen veroorzaken. Dergelijke elektromotoren zijn hermetisch en niet onder druk gezet.
toepassingsgebied frequentieomvormers behoorlijk uitgebreid. Ze zijn gewild in gereedschapswerktuigen en elektrische aandrijvingen van industriële mechanismen, transportbanden, afzuigventilatiesystemen, enzovoort. Het principe van de chastotnik is de regel voor het berekenen van de hoeksnelheid van rotatie van de as, die factoren omvat als de frequentie van de netvoeding. Door de frequentie van de voedingsbron van de motorwikkeling te veranderen, is het dus mogelijk om de rotatiesnelheid van de motorrotor in een directe relatie te regelen, waardoor de omwentelingen van de elektrische motor worden verminderd of deze worden verhoogd. Deze apparaten worden ook "inverters" genoemd, dankzij de methode waarmee de taak van het gelijktijdig regelen van de frequentie en spanning aan de uitgang van de omzetter wordt opgelost. Alle frequentieomvormers zijn noodzakelijkerwijs gelabeld met tekens, waarvan de kenmerken zijn vermeld:
De meeste industriële frequentieomvormers zijn ontworpen om in te werken driefasige netwerken AC, er zijn echter ook andere modellen, zoals chastotniki voor eenfasige motoren.
Het leven van een moderne persoon is moeilijk voorstelbaar zonder een mechanisme als een elektromotor. Kijk rond - ze hebben bijna universele distributie ontvangen. Tegenwoordig worden ze niet alleen in alle industrieën gebruikt, maar ook in transport, objecten en apparaten die in het dagelijks leven, op het werk en thuis worden gebruikt. Haardrogers, ventilatoren, naaimachines, bouwhulpmiddelen - dit is geen complete lijst van apparaten die elektrische motoren gebruiken.
Bijzonder veilig onderscheiden juist door motoren, zodat ze worden veel gebruikt in de aandrijvingen van metaal-, hout- machines en andere industriële machines, in smeedpersen, hijsen, liften, weven, naaien, machines, industriële ventilatoren, compressoren, pompen, centrifuges, beton mixers . Kraanelektrische motoren worden gebruikt in de kapitaal-, industriële en civiele bouw, in de mijnbouw, de metallurgische industrie, energie, transport.
Metro, tram, trolleybus - al deze vormen van vervoer danken hun bestaan aan de elektromotor. Elk kantoor- of woongebouw vandaag de dag kan niet worden gedacht zonder een airconditioner of luchtzuiveringssysteem - ze gebruiken ook elektrische motoren. De bediening van de meeste moderne apparatuur is onmogelijk zonder een elektromotor en hangt daarom sterk af van de kwaliteit en betrouwbaarheid van dit mechanisme. Zijn breuk kan tot zeer trieste resultaten leiden, tot het stoppen van de productie en enorme financiële verliezen. Daarom is het mogelijk om elektrische motoren alleen bij een betrouwbare en vertrouwde leverancier te kopen die de productkwaliteit garandeert.
Het principe van de motor is het effect van magnetisme, waardoor je effectief kunt transformeren elektrische energie in mechanisch. Het principe van energieconversie bij verschillende typen elektromotoren is hetzelfde voor alle typen elektromotoren, maar het ontwerp van motoren en methoden voor het regelen van de snelheid van een roterend moment kunnen verschillen. Iedereen is bekend van school eenvoudigste voorbeeld elektromotor - wanneer het frame roteert tussen de polen van een permanente magneet. Natuurlijk is de apparaatmotor, die wordt gebruikt in industriële machines of huishoudelijke apparaten, veel gecompliceerder. Laten we eens kijken hoe een asynchrone elektrische motor die het meest wordt gebruikt in de industrie werkt.
Het principe van de werking van de asynchrone motor.
Werkingsprincipe inductiemotor, zoals de anderen, is gebaseerd op het gebruik van een roterend magnetisch veld. De rotatiesnelheid van het magnetische veld wordt meestal synchroon genoemd, omdat het overeenkomt met de rotatiesnelheid van de magneet. De rotatiesnelheid van de cilinder wordt asynchroon genoemd, dat wil zeggen niet samenvallend met de rotatiesnelheid van de magneet. De rotatiesnelheid van de cilinder (rotor) verschilt van de synchrone rotatiesnelheid van het magnetische veld met een kleine hoeveelheid, genaamd glijden. Te forceren om te forceren elektrische stroom creëer een roterend magnetisch veld en gebruik het om de rotor te roteren is gewoonlijk gebruikte driefasestroom.
Aan de polen van een ijzeren kern van een ringvormige vorm, de stator van een elektromotor, drie wikkelingen, netwerken driefasenstroom ten opzichte van elkaar onder een hoek van 120 °. De kern is bevestigd op de as van de metalen cilinder, de rotor van de elektromotor. Als de wikkelingen onderling verbonden zijn en verbonden zijn met het driefasige stroomnetwerk, dan roteert de totale magnetische flux die door de drie polen wordt gecreëerd. De totale magnetische flux op hetzelfde moment verandert de richting ervan met een verandering in de richting van de stroom in de statorwikkelingen (polen). In dit geval, in één periode van verandering in de stroom in de wikkelingen, zal de magnetische flux een volledige rotatie maken. De roterende magnetische flux zal de cilinder wegnemen en op deze manier krijgen we een asynchrone elektromotor.
De statorwindingen kunnen worden verbonden door een "ster", maar een roterend magnetisch veld wordt ook gevormd wanneer ze worden verbonden door een "driehoek". Als u de windingen van de tweede en derde fase verwisselt, verandert de magnetische flux de draairichting naar het tegenovergestelde. Hetzelfde resultaat kan worden bereikt zonder de statorwikkelingen onderling uit te wisselen, maar door de stroom van de tweede fase van het netwerk naar de derde fase van de stator en de derde fase van het netwerk naar de tweede fase van de stator te leiden. Het is dus mogelijk om de draairichting van het magnetische veld te veranderen door twee fasen te schakelen.
De stator van een moderne asynchrone elektrische motor heeft niet-aangedrukte polen, d.w.z. het binnenoppervlak van de stator is volledig glad gemaakt. Om wervelstroomverliezen te verminderen, wordt de statorkern samengesteld uit dunne geperste staalplaten. De gemonteerde stator kern is bevestigd in een stalen kast. In de groeven van de stator lag een wikkeling van koperdraad. De fasewikkelingen van de stator van de elektromotor zijn verbonden door een "ster" of "driehoek", waarvoor alle begin- en einden van de wikkelingen op de behuizing worden weergegeven - op een speciaal isolerend scherm. Zo'n apparaat van de stator is erg handig, omdat je hiermee zijn wikkelingen op verschillende standaardspanningen kunt draaien.
De rotor van een asynchrone motor, zoals een stator, bestaat uit gestampte staalplaten. Een wikkeling wordt in de sleuven van de rotor gelegd. Afhankelijk van het rotorontwerp, zijn asynchrone elektromotoren onderverdeeld in motoren met eekhoorn kooi en fase rotor. Winding eekhoorn kooi rotor is gemaakt van koperen staven, gelegd in de groeven van de rotor. De uiteinden van de staven zijn verbonden met behulp van een koperen ring. Deze wikkeling wordt kronkelende eekhoornkooi genoemd. Merk op dat de koperen staven in de groeven niet geïsoleerd zijn.
Voorwaarden voor het selecteren van een elektromotor
De keuze van een van de catalogustypen elektrische motoren wordt als correct beschouwd onder de volgende voorwaarden:
a) de meest volledige overeenstemming van de werkende machine van de elektrische motor (aandrijving) met de mechanische eigenschappen. Dit betekent dat de elektromotor een dergelijk mechanisch kenmerk moet hebben, waarin het de aandrijving de noodzakelijke waarden van snelheid en versnelling kan meedelen, zowel tijdens het gebruik als aan het begin van de koers;
b) het maximale gebruik van motorvermogen in het proces. De temperatuur van alle actieve delen van de elektromotor in de zwaarste bedrijfsmodi moet zo dicht mogelijk bij de verwarmingstemperatuur liggen die door de normen wordt bepaald, maar mag deze niet overschrijden;
c) overeenstemming van de elektromotor met de aandrijving en omgevingscondities in termen van het ontwerp;
d) overeenstemming van de motor met de parameters van zijn voedingsnetwerk.
De volgende initiële gegevens zijn nodig voor de keuze van de elektromotor:
a) de naam en het type mechanisme;
b) het maximale vermogen op de aandrijfas van het mechanisme, als de werkingsmodus continu is en de belasting constant is, en in andere gevallen - grafieken van veranderingen in vermogen of moment van weerstand als een functie van tijd;
c) de rotatiesnelheid van de aandrijfas van het mechanisme;
d) de wijze van koppeling van het mechanisme met de motoras (in de aanwezigheid van tandwielen, het type versnelling en overbrengingsverhouding zijn aangegeven);
e) de hoeveelheid koppel bij het opstarten, die de elektromotor moet leveren op de aandrijfas van het mechanisme;
e) de grenzen van de snelheidsregeling van het aangedreven mechanisme met aanduiding van de bovenste en onderste waarden van de snelheden en de overeenkomstige waarden van vermogen en koppel;
g) de aard en kwaliteit (zachtheid, hoogte) van de vereiste snelheidsregeling;
h) de frequentie van starten of starten van de rit binnen een uur; en) milieukenmerken.
De keuze van een elektromotor gebaseerd op het rekening houden met alle condities geschiedt volgens catalogusgegevens.
Voor brede mechanismen wordt de keuze van een elektromotor aanzienlijk vereenvoudigd door de gegevens in de relevante informatie van de fabrikanten en wordt deze beperkt tot het verduidelijken van het type elektromotor met betrekking tot netwerkparameters en de aard van de omgeving.
Selectie van motorvermogen
De keuze van motorvermogen moet worden gemaakt in overeenstemming met de aard van de belastingen van de werkende machine. Dit personage wordt op twee gronden beoordeeld:
a) volgens de nominale bedrijfsmodus;
b) veranderingen in de hoeveelheid verbruikt vermogen.
Er zijn de volgende werkingsmodi:
a) lang (lang) wanneer de werkperiode zo lang is dat elektrische motor verwarming de steady-state-waarde bereikt (bijvoorbeeld in pompen, transportbanden, ventilatoren, enz.);
b) op korte termijn, wanneer de duur van de werkperiode onvoldoende is om de temperatuur van verwarming door de elektromotor overeenkomend met de gegeven belasting te bereiken, en de stopperioden daarentegen volstaan om de elektrische motor tot de omgevingstemperatuur te koelen. In deze modus kunnen elektrische motoren verschillende mechanismen bedienen;
c) met tussenpozen - met een relatieve activeringsduur van 15, 25, 40 en 60% met een duur van één cyclus van niet meer dan 10 minuten (bijvoorbeeld in kranen, sommige machines, generatoren voor lasmotoren met één operator, enz.).
Volgens de wijzigingen in het stroomverbruik, verschillen de volgende gevallen:
a) constante belasting, wanneer de hoeveelheid stroom die wordt verbruikt tijdens bedrijf constant is of kleine afwijkingen heeft van de gemiddelde waarde, zoals bijvoorbeeld voor centrifugaalpompen, ventilatoren, compressoren met constante luchtstroom, enz.;
b) variabele belasting, wanneer de hoeveelheid verbruikt vermogen periodiek varieert, zoals bijvoorbeeld in graafmachines, kranen, sommige machines, enz .;
c) pulserende belasting, wanneer de hoeveelheid verbruikt vermogen continu verandert, zoals bijvoorbeeld in zuigerpompen, kaakbrekers, zeven, enz.
Het vermogen van de elektromotor moet aan drie voorwaarden voldoen:
a) normale verwarming tijdens bedrijf;
b) voldoende overbelastingscapaciteit;
c) voldoende startkoppel.
Alle elektromotoren zijn onderverdeeld in twee hoofdgroepen:
a) voor een lange werkingswijze (zonder de duur van de opname te beperken);
b) voor intermitterende werking met schakeltijden van 15, 25, 40 en 60%.
Voor de eerste groep, in catalogi en paspoorten, is de continue kracht die de elektromotor onbeperkt kan ontwikkelen, voor de tweede groep, het vermogen dat de elektromotor kan ontwikkelen, het werken met onderbrekingen voor een oneindig lange tijd met een bepaalde inschakeltijd.
Correct geselecteerd in alle gevallen wordt beschouwd als een dergelijke elektromotor, die, werkend met de belasting, maar het schema ingesteld door de werkende machine, de volledige toegestane verwarming van alle onderdelen bereikt. De keuze van elektromotoren met de zogenaamde "vermogensmarge", gebaseerd op de grootst mogelijke belasting van het schema, leidt tot een onderbenutting van de elektromotor en dientengevolge tot een toename van kapitaalkosten en bedrijfskosten door het verminderen van vermogensfactoren en efficiëntie.
Een overmatige toename van het motorvermogen kan ook leiden tot schokken tijdens het accelereren.
Als de motor lange tijd moet werken met een constante of enigszins variërende belasting, dan is het bepalen van het vermogen niet moeilijk en gebeurt volgens de formules, meestal inclusief empirische coëfficiënten.
Het is veel moeilijker om de kracht van elektromotoren van andere bedrijfsmodi te kiezen.
Kortstondige belasting wordt gekenmerkt door het feit dat de perioden van opname kort zijn en pauzes voldoende zijn voor volledige koeling van de elektromotor. In dit geval wordt aangenomen dat de belasting van de elektromotor constant wordt gehouden of bijna constant gedurende perioden van inschakelen.
Om ervoor te zorgen dat de elektromotor op de juiste wijze wordt gebruikt voor verwarming in deze modus, is het noodzakelijk deze zo te kiezen dat zijn continu vermogen (aangegeven in de catalogi) minder is dan het vermogen dat overeenkomt met de belasting op korte termijn, d.w.z. dat de elektromotor een thermische overbelasting heeft gedurende de perioden van zijn werking op korte termijn.
Als de werkingsperiodes van de elektromotor beduidend minder zijn dan de tijd die nodig is voor de volledige verwarming, maar de pauze tussen de perioden van inschakelen aanzienlijk korter is dan de tijd van volledige koeling, treedt een kortstondige belasting op.
Praktisch gezien zou men een onderscheid moeten maken tussen twee soorten van dergelijk werk:
a) de belasting tijdens de werkperiode is constant van omvang en dientengevolge wordt de grafiek ervan weergegeven als rechthoeken afgewisseld met pauzes;
b) de belasting tijdens de werkperiode varieert volgens een min of meer gecompliceerde wet.
In beide gevallen kan het probleem van het kiezen van een elektrische motor door vermogen zowel analytisch als grafisch worden opgelost. Beide methoden zijn nogal gecompliceerd, daarom is een vereenvoudigde methode van equivalente grootte praktisch aan te raden, die drie methoden omvat:
a) gemiddelde blokstroom;
b) gemiddeld vierkant vermogen;
c) het gemiddelde vierkante moment.
Controle van de mechanische overbelastingscapaciteit van de motor
Na het selecteren van het motorvermogen volgens de verwarmingsomstandigheden, is het noodzakelijk om de mechanische overbelastingscapaciteit van de motor te controleren, d.w.z. ervoor te zorgen dat het maximale beladingsmoment volgens het schema tijdens bedrijf en het moment bij het opstarten de maximale momentwaarde uit de catalogus niet overschrijdt.
In asynchrone en synchrone elektromotoren wordt de waarde van de toegestane mechanische overbelasting veroorzaakt door hun kantelende elektromagnetische moment, bij het bereiken waar deze elektromotoren stoppen.
Het aantal maximale momenten ten opzichte van de nominale waarde moet 1,8 zijn voor driefasige asynchrone elektromotoren met sleepringen van niet minder dan 1,65 voor dezelfde kortgesloten elektromotoren. Het veelvoud van het maximumkoppel van een synchrone motor mag ook niet lager zijn dan 1,65 bij nominale spanningen, frequentie en bekrachtigingsstroom, met een arbeidsfactor van 0,9 (bij voorloopstroom).
Bijna asynchrone en synchrone elektromotoren hebben een mechanische overbelastingscapaciteit van maximaal 2-2,5, en voor sommige speciale elektromotoren stijgt deze waarde naar 3-3.5.
De toegestane overbelasting van elektromotoren met gelijkstroom wordt bepaald door de werkomstandigheden en volgens GOST is van 2 tot 4, de ondergrens geldt voor elektromotoren met parallel, en de bovengrens voor elektromotoren met seriebekrachtiging.
Als de toevoer- en distributienetwerken belastingsgevoelig zijn, moet de mechanische overbelastingscapaciteit worden gecontroleerd, rekening houdend met spanningsverliezen in de netwerken.
Voor asynchrone kortgesloten en synchrone elektrische motoren moet de veelvoud van het aanvangsmoment ten minste 0,9 zijn (ten opzichte van de nominale waarde).
In feite is het veelvoud van het initiële moment in elektrische motoren met een dubbele eekhoornkooi en met een diepe groef veel hoger en bereikt het 2-2.4.
Bij het kiezen van het vermogen van de elektromotor moet in gedachten worden gehouden dat de verwarming van de elektromotoren wordt beïnvloed door de frequentie van insluitsels. De toelaatbare frequentie van insluitsels hangt af van de normale slip, het zwaaimoment van de rotor en de startstroomverhouding.
Asynchrone motoren van normale typen laten geen belasting toe van 400 tot 1000, en elektromotoren met verhoogde slip - van 1100 tot 2700 starts per uur. Bij het starten onder belasting wordt het toegestane aantal insluitsels aanzienlijk verminderd.
De startstroom van een elektromotor met een eekhoorn-kooi rotor heeft een grote waarde, en deze omstandigheid in omstandigheden van frequente start, en in het bijzonder met een verhoogde versnellingstijd, is belangrijk.
In tegenstelling tot elektromotoren met een faserotor, waarbij een deel van de bij het opstarten opgewekte warmte wordt vrijgegeven in een regelweerstand, d.w.z. buiten de machine, in kortgesloten elektromotoren, komt alle warmte vrij in de machine zelf, die zijn verhoogde verwarming veroorzaakt. Daarom moet bij de keuze van het vermogen van deze elektromotoren rekening worden gehouden met de verwarming tijdens talrijke starts.