In het paspoort van de elektromotor wordt de stroom bij de nominale belasting op de as aangegeven. Als bijvoorbeeld 13,8 / 8 A wordt aangegeven, betekent dit dat wanneer de motor wordt ingeschakeld in een 220 V-netwerk en bij nominale belasting, de stroom die wordt verbruikt door het netwerk 13,8 A zal zijn. Er wordt een stroom van 8 A verbruikt, dat wil zeggen dat de gelijkheid van bevoegdheden waar is: √ 3 x 380 x 8 = √ 3 x 220 x 13,8.
Deze toepassingen vereisen vaak speciale motoren en bijbehorende schakelmechanismen. Als de belastingskoppelcurve τ van de belasting complex is en het motorkoppel τ van de motor niet constant is, is het raadzaam om de berekening in afzonderlijke zones te verdelen, zoals weergegeven in figuur 5.
Nu worden de versnellingstijd voor individuele zones en de gemiddelde acceleratietijden die in het segment van kracht worden berekend en toegevoegd voor elk afzonderlijk snelheidsegment. Nu wordt de vergelijking gegeven om de starttijd van het niet-constante moment van versnelling te berekenen.
Als u het nominale vermogen van de motor kent (uit het paspoort), kunt u de nominale stroom bepalen. Wanneer de motor is ingeschakeld driefasig netwerk 380 V nominale stroom kan worden berekend door de volgende formule:
I n = P n / (√3U n x η x cosf),
Fig. 1. Paspoort van een elektromotor. Nominaal vermogen is 1,5 kV, nominale stroom bij een spanning van 380 V - 3,4 A.
Acceleratietijd voor onstabiele koppels. In gevallen waarbij de waarde van elk hetzelfde is als in vergelijking 2, behalve. Dit toont de som van alle zones met vermenigvuldiging van het traagheidsmoment en snelheidsverandering. Deze tijd is bijna gelijk aan de tijd berekend door de vergelijking. Figuur 6 toont de curve van snelheid en tijd, verkregen door modellering, de grafiek toont dat de snelheid toeneemt met de tijd en de nominale waarde benadert na ongeveer 7 seconden, wat overeenkomt met het resultaat berekend met een wiskundige vergelijking.
Dit artikel beschrijft het belang van de starttijd van een asynchrone motor samen met verschillende soorten startmethoden. De resultaten van beide benaderingen bleken samen te vallen. Een elektromotor met uitschakeling is bestand tegen weinig tot elektriciteit, aangezien de motorwikkelingen bijna net zo kort werken totdat ze worden geactiveerd. Wanneer de stroom wordt ingeschakeld, kan de stroom vele malen groter zijn dan de stroom wanneer de motor onder belasting op nominaal toerental draait. Deze stroom van stroom duurt slechts een fractie van een seconde.
Als niet bekend efficiëntie. en motorvermogensfactor, bijvoorbeeld in de afwezigheid van een paspoortplaat op de motor, kan de nominale stroom ervan worden bepaald met een kleine fout door de verhouding "twee ampères per kilowatt", d.w.z. als het nominaal vermogen van de motor 10 kW is, dan is de verbruikte stroom ongeveer gelijk aan 20 A.
Voor de in de figuur aangegeven motor geldt deze verhouding ook (3,4 A × 2 x 1,5). Nauwkeuriger waarden van de stromen bij gebruik van deze verhouding worden verkregen wanneer het motorvermogen vanaf 3 kW is.
De berekening van de exacte startstroom is niet mogelijk, maar het bereik kan worden bepaald als de documentatie van de fabrikant dit niet aangeeft. Lees het typeplaatje van de motor op de motor en zoek het aangegeven voltage. De National Electrical Code bepaalt dat alle motoren een naamplaat hebben die informatie biedt die specifiek is voor de elektrische prestaties van de motor.
Zoek de lettercode van de geblokkeerde rotor of de "geblokkeerde rotorcode" op het naamplaatje van de motor. Deze letters zijn weggelaten om verwarring te voorkomen. Volg de regel met de code van de letter aan de rechterkant en vind het opgegeven bereik. Het bereik wordt gespecificeerd in duizenden volt-ampères of kilowatts.
Wanneer de motor stationair draait, wordt een kleine hoeveelheid stroom verbruikt van het netwerk (nullaststroom). Naarmate de belasting toeneemt, neemt het stroomverbruik toe. Met toenemende stroom verhoogt de verwarming van de wikkelingen. Hoge overbelasting leidt ertoe dat de verhoogde stroom oververhitting van de motorwikkelingen veroorzaakt en dat het gevaar bestaat dat de isolatie wordt verkoold (verbranding van elektrische motoren).
Vermenigvuldig elk getal in het bereik met 1, deel elk resultaat door de motorspanning op het typeplaatje. Het resulterende bereik is het startstroombereik. De scheiding van de motorspanning met 230 volt geeft een startstroombereik van 8 tot 1 ampère.
De startstroom is slechts van voorbijgaande aard en als de stroomonderbreker de juiste waarde heeft, zal deze een fractie van een seconde in de huidige spikes niet ontkoppelen. Wanneer de motorwikkelingen worden geactiveerd, creëren ze weerstand tegen de stroom en begint de stroom te dalen. Wanneer de motor op volle toeren draait, staat het huidige niveau op het niveau dat op het typeplaatje van de motor is aangegeven als de maximale belasting.
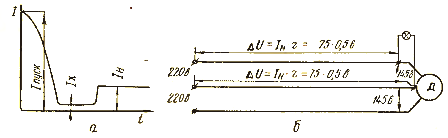
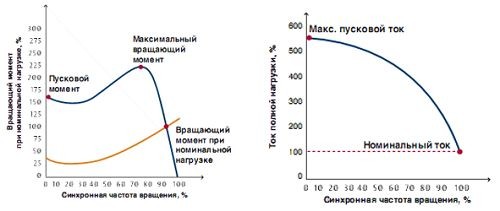
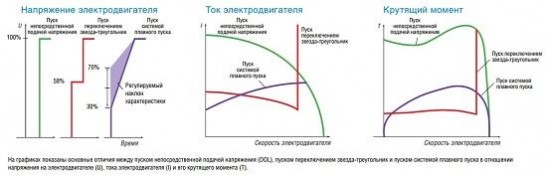
Op het moment van opstarten vanuit het netwerk, verbruikt een elektrische motor de zogenaamde startstroom, die 3 tot 8 keer groter kan zijn dan de nominale stroom. De aard van de huidige verandering wordt weergegeven in de grafiek (Fig. 2, a).
Fig. 2. De aard van veranderingen in de stroom verbruikt door de motor van het netwerk (a), en het effect van hoge stroom op de spanningsschommelingen in het netwerk (b)
Spanning is belangrijk voor het bepalen van de startstroom. Als het motortypeplaatje verschillende spanningen aangeeft, moet u de gebruikte spanning bepalen. Gemakkelijke plaats om het te meten wanneer de motor is uitgeschakeld. Het type spanning bepaalt de meetmethode. Meet de driefasenstroom tussen de twee hete contacten en verdubbel deze. De afzonderlijke fasestroom wordt gemeten tussen twee hete terminals. Eenfasestroom wordt gemeten van de hotterminal naar aarde.
Elektromotoren hebben een nominale spanning en frequentie en een nominale vollaststroom, die te vinden is op het typeplaatje van de motor. De motoren moeten werken op nominale spanning en frequentie, en dan kan de motoroverbelasting worden berekend door de actuele motorstroom te vergelijken met de nominale vollaststroom. De motoren warmen op bij overbelasting, wat de duur van hun isolatie vermindert. Als het typeplaatje van de motor echter een servicefactor geeft, kan de motor met deze hoeveelheid worden overbelast zonder schade aan te richten.
De exacte waarde van de startstroom voor elke specifieke motor kan worden bepaald door de waarde te kennen start huidige tarieven - Ik start / ik ben nom. De veelheid aan startstroom is een van de technische kenmerken van de motor, die te vinden is in catalogi. De startstroom wordt bepaald door de volgende formule: ik start = I n x (ik start / ik nom). Met een nominale motorstroom van 20 A en een startstroomverhouding van 6 is de startstroom bijvoorbeeld 20 x 6 = 120 A.
Haal de nominale spanning en frequentie op van het typeplaatje van de motor. Zorg ervoor dat de stroomtoevoer naar de motor overeenkomt met de nominale spanning. Als deze nummers niet overeenkomen, geeft het meten van de motorstroom mogelijk geen goede indicatie van motorverwarming en overbelasting.
Verdelen volgens nominale belastingstroom van het motorplaatplaatje. Dit is de belastingsfactor voor de motor. Dit betekent dat de motor 10% overbelast is. Als de belastingsfactor 0 of minder is, is de motor niet overbelast. Controleer het naamplaatje van de motor op de servicefactor. Veel motoren hebben een servicefactor van 15, wat betekent dat de motor 15% zonder schade kan worden overbelast. Als de motor in het voorbeeld uit stap 2 een servicefactor van 15 had, zou de overbelasting acceptabel zijn en zou de motor zonder schade kunnen werken.
Kennis van de werkelijke hoeveelheid startstroom is nodig om zekeringen te selecteren, om de werking van elektromagnetische ontladingen tijdens het starten van de motor te controleren bij het selecteren van stroomonderbrekers en om de hoeveelheid spanningsdaling in het netwerk bij het starten te bepalen.
Een grote startstroom, waarvoor het netwerk meestal niet is ontworpen, veroorzaakt een aanzienlijke vermindering van de netspanning (afbeelding 2, b).
Controleer het typeplaatje van de motor op omgevingstemperatuur en isolatieklasse. Elektrische motoren zijn meestal ontworpen om te werken bij een omgevingstemperatuur van 40 graden. Als de motor altijd werkt bij een omgevingstemperatuur die ver onder de nominale omgevingstemperatuur ligt, kan de motor mogelijk overbelast raken zonder schade aan te richten. Neem contact op met de fabrikant voor informatie over het nieuwe typeplaatje, op basis van een lagere nominale omgevingstemperatuur.
Als de motor draait met een isolatietemperatuur die aanzienlijk lager is maximale temperatuurHet is mogelijk dat de motor overbelast raakt zonder schade aan te richten. Als er bij het opstarten een onverwachte overstroombeveiliging optreedt, betekent dit dat de startstroom de normale limieten overschrijdt. Als gevolg hiervan kan een maximale release worden bereikt, de levensduur kan worden verkort en zelfs sommige apparaten kunnen worden vernietigd. Om deze situatie te voorkomen, moet de redundantie van schakelapparatuur worden beschouwd. In overeenstemming met het risico, tonen de tabellen de combinatie van een stroomonderbreker, een schakelaar en een thermisch relais om coördinatie van type 1 of type 2 te verkrijgen. Soms kan deze waarde maximaal 25 keer zijn. . Hoewel motoren met een hoog rendement op de markt te vinden zijn, zijn hun inschakelstromen in de praktijk ongeveer hetzelfde als sommige van de standaardmotoren.
Als we de weerstand van de draden van de bron naar de motor gelijk aan 0,5 Ohm nemen, de nominale stroom I n = 15 A en de startstroom vijf keer de nominale stroom, dan is het spanningsverlies in de draden op het moment van starten 0,5 x 75 + 0, 5 x 75 = 75 V.
Aan de klemmen van de motor, evenals aan de klemmen van een aantal werkende elektromotoren, zal er 220 - 75 = 145 V zijn. Een dergelijke afname van de spanning kan het remmen van de werkende motoren veroorzaken, wat een nog grotere toename van de netwerkstroom en gesprongen zekeringen tot gevolg zal hebben.
Het gebruik van een starterdelastarter, een statische softstarter of een frequentieregelaar vermindert de inschakelstroom. Ook "Asynchrone motoren" voor meer informatie. Om technische en financiële redenen is het meestal voordelig om de aangeleverde stroom te verminderen asynchrone motoren. Dit kan worden bereikt met behulp van condensatoren zonder de kracht van de motoren te beïnvloeden.
De toepassing van dit principe op de werking van asynchrone motoren wordt ook wel "arbeidsfactor-verbetering" of "arbeidsfactorcorrectie" genoemd. Zoals beschreven in het hoofdstuk "Power Factor Correction", kan het schijnbare vermogen dat wordt geleverd aan een inductiemotor aanzienlijk worden verminderd door condensatoren te gebruiken die op de shunt zijn aangesloten.
de elektrische lampen op de momenten dat de motor wordt gestart, wordt de warmte verlaagd (de lampen "knipperen"). Daarom streven ze er bij het starten van de elektromotoren naar de startstromen te verminderen.
Om de startstroom te verminderen, kan een motorstartcircuit worden gebruikt met een statorwikkeling die schakelt van ster naar delta.In dit geval neemt de fasespanning af met √ W-tijden en dienovereenkomstig is de startstroom beperkt. Nadat de rotor een bepaalde snelheid heeft bereikt, worden de statorwikkelingen omgeschakeld naar het delta-circuit en wordt de spanning ervan gelijk aan de nominale spanning. Schakelen gebeurt meestal automatisch met behulp van een tijd- of stroomrelais.
De blindvermogencompensatie wordt met name aanbevolen voor motoren die lang meegaan met verminderd vermogen. De stroom die na correctie van de arbeidsfactor aan de motor wordt geleverd, wordt bepaald. De aanvullende informatie in deze release heeft betrekking op andere belangrijke gebieden die van invloed kunnen zijn op de keuze van het beste type motor voor een bepaalde taak.
Motorcases, zekeringen, thermische overbelastingsbeveiliging en motorstarters zullen in een latere versie worden besproken. De informatie in deze release is alleen van toepassing op dit type en kan niet worden toegepast op andere typen. Driefasige asynchrone elektrode-eenheid met eekhoorn kooi Deze motor heeft een rotor bestaande uit ijzeren platen, maar heeft geen wikkeling op de rotor; daarom heeft het geen borstels, schakelaars of glibberige ringen. Alle wikkelingen bevinden zich op de stator, die ook is gemaakt van ijzerlaminaten met verschillende aantallen noord- en zuidpolen.
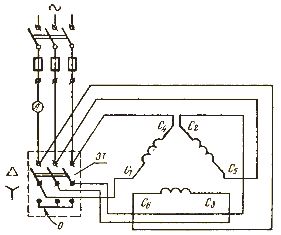
Fig. 3. Schema van startmotor van de elektromotor met schakelen van statorwikkelingen van een ster naar een driehoek
transformatie elektrische stroom De kinetiek wordt uitgevoerd met behulp van verschillende soorten elektromotoren. Deze apparaten worden veel gebruikt in de moderne productie en in het dagelijks leven. Meestal werken elektrische motoren als elektrische aandrijvingen van machines en mechanismen, en worden ze gebruikt om pompapparatuur, ventilatiesystemen en vele andere eenheden en apparaten te bedienen. In verband met een dergelijke brede toepassing is de berekening van het vermogen van de elektromotor van bijzonder belang. Voor deze doeleinden zijn veel verschillende methoden ontwikkeld die het uitvoeren van berekeningen in relatie tot specifieke bedrijfsomstandigheden mogelijk maken.
De motor werkt op een constante snelheid, bepaald door de frequentie van de lijn, en het aantal paren magnetische polen dat het heeft. Met uitzondering van een klein aantal slipsnelheden bij volle belasting, werkt het niet bij lagere snelheden zonder ernstige oververhitting.
Stroom- en spanningskarakteristieken Motorstroom. Koppel wordt gecreëerd door de huidige thread; hoe hoger de stroom, hoe hoger de koppeloutput. De stroom is ook verantwoordelijk voor de temperatuurstijging van de wikkelingen. Elke bedrijfstoestand, zoals lage spanning, onjuiste frequentie of koppeloverbelasting, die leidt tot een overschrijding van de nominale nominale waarde, zal leiden tot een abnormale temperatuurstijging.
Er zijn veel soorten en modificaties van elektromotoren. Elk van hen heeft zijn eigen kracht en andere parameters.
De belangrijkste classificatie verdeelt deze apparaten in permanente en elektrische motoren. wisselstroom. De eerste optie wordt veel minder vaak gebruikt, omdat voor de werking ervan de verplichte beschikbaarheid van een bron vereist is. gelijkstroom of apparaat dat transformeert wisselspanning in gelijkstroom. De implementatie van deze voorwaarde in moderne productie vereist aanzienlijke extra kosten.
Doorgaans kunnen motoren tot 90% van de nominale spanning houden en ondanks een abnormale temperatuurstijging zal deze niet groot genoeg zijn om de isolatie te beschadigen. De startstroom en de stroomafname zullen echter hoger zijn dan normaal. Tegelijkertijd is het noodzakelijk om de bedrading, de zekering en de thermische overbelastingsbeveiliging goed af te stellen. Bovendien zal het motorgeluid aanzienlijk toenemen en kan dit ongewenst zijn.
Als de spanning bij volledige belasting niet in evenwicht is tussen de fasen, is de motor defect of is de voedingslijn uit balans. Om te bepalen waar de fout ligt, meet u eerst de spanning van alle fasen. Verplaats vervolgens alle hoogspanningslijnen naar één fase en herhaal de metingen. Als een hogere spanning versnelt bij het opnieuw verbinden, is de voedingslijn niet gebalanceerd. Corrigerende maatregelen kunnen als volgt worden genomen.
Maar ondanks significante tekortkomingen, hebben DC-motoren een hoog rendement startmoment en stabiel werken, zelfs bij hoge overbelastingen. Vanwege zijn kwaliteiten worden deze units veel gebruikt in elektrisch vervoer, in de metallurgische en machinegereedschappenindustrie.
De meeste moderne apparatuur werkt echter met AC-motoren. De basis van de werking van deze apparaten ligt, waardoor een geleidende omgeving ontstaat. Het magnetische veld wordt gemaakt met behulp van windingen, gestroomlijnd door stromingen of met behulp van permanente magneten. AC-motoren kunnen zijn.
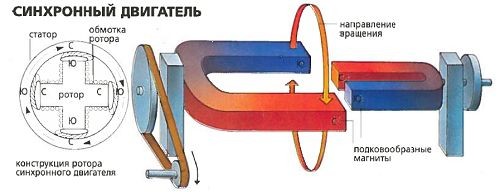
Het gebruik van synchrone elektrische motoren wordt toegepast in apparatuur waarbij een constante rotatiesnelheid vereist is. Dit zijn DC-generatoren, pompen, compressoren en andere soortgelijke installaties. Verschillende modellen hebben hun eigen technische kenmerken. De waarde van de rotatiesnelheid kan bijvoorbeeld in het bereik van 125-1000 omwentelingen per minuut liggen en het vermogen bereikt 10 duizend kilowatt.
In veel uitvoeringen bevindt zich een kortgesloten wikkeling op de rotor. Met de hulp, indien nodig, is gemaakt asynchrone start, waarna de synchrone motor normaal blijft werken, waardoor het verlies van elektrische energie wordt geminimaliseerd. Deze motoren worden gekenmerkt door een klein formaat en een hoog rendement.

AC inductiemotoren zijn veel meer verbreid op industrieel gebied. Ze hebben een zeer hoge snelheid. magnetisch veldaanzienlijk hoger dan de rotatiesnelheid van de rotor. Een aanzienlijk nadeel van deze apparaten wordt beschouwd als een verlaging van de efficiëntie tot 30-50% van de norm bij lage belastingen. Bovendien worden tijdens het opstarten de parameters van de stroom meerdere keren groter in vergelijking met de prestatie-indicatoren. Deze problemen worden geëlimineerd door gebruik te maken van frequentieomvormers en softstarters.
Asynchrone motoren worden gebruikt in die faciliteiten die vaak aan en uit moeten schakelen, bijvoorbeeld in liften, lieren en andere apparaten.
De keuze van de elektromotor voor een pompinstallatie hangt af van de specifieke omstandigheden, allereerst - van het watertoevoerschema. In de meeste gevallen wordt de watertoevoer uitgevoerd met behulp van een watertank of waterboiler. Om het hele systeem aan te drijven, worden centrifugaalpompen met asynchrone motoren gebruikt.
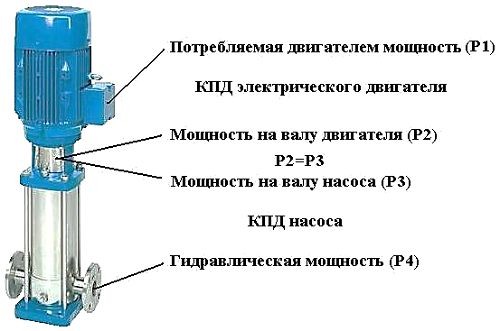
De keuze van het optimale pompvermogen wordt uitgevoerd afhankelijk van de behoefte aan toevoer en druk van de vloeistof. De pompstroom QH wordt gemeten in liters die in 1 uur worden toegevoerd en wordt l / h genoemd. Deze parameter wordt bepaald door de volgende formule: Qн = Qmaxч = (kch х kсут х Qср.сут) / (24 η), waarbij Qmaxч de mogelijke maximale waterstroom per uur is, l / h, kch de onregelmatigheidscoëfficiënt van het uurstroomdebiet is, kday de onregelmatigheidscoëfficiënt is dagelijkse stroomsnelheid (1,1 - 1,3), η is de efficiëntie van de pompeenheid, rekening houdend met waterverliezen), Qav.day - de waarde van het gemiddelde dagelijkse waterverbruik (l / dag).
De optimale waterdruk moet ervoor zorgen dat deze op een vaste plaats wordt aangevoerd onder de voorwaarde van de noodzakelijke druk. De vereiste pompkopparameters (HHP) zijn afhankelijk van de aanzuighoogte (HVS) en uitlaathoogte (NNG), die samen de statische druk (Hc), het verlies aan pijpleidingen (Hp) en het drukverschil tussen de bovenste (sloot) en lagere (Rnu) bepalen. levels.
Op basis van het feit dat de drukwaarde gelijk is aan H = P / ρg, waarbij P de druk (Pa) is, is p de vloeistofdichtheid (kg / m 3), g = 9,8 m / s2 is zwaartekrachtversnelling, g is specifiek vloeistofgewicht (kg / m 3), wordt de volgende formule verkregen: HNTP = Hc + Hn + (1 / ρ) x (Ditch - Rnu).
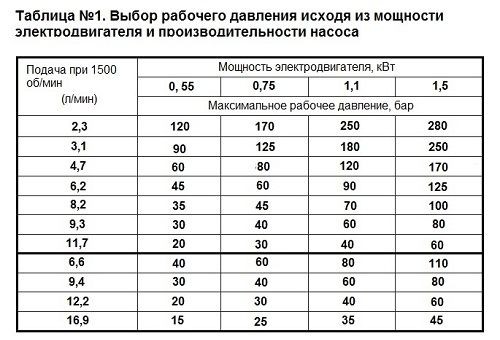
Na het berekenen van de waterstroom en de kop in de catalogus, is het al mogelijk om een pomp te selecteren met de meest geschikte parameters. Om niet te worden verward met de kracht van de elektromotor, moet deze worden bepaald aan de hand van de formule: PDA = (kz x ρ x Qn x Hn) / (ηn x ηп), waarbij kz de veiligheidsfactor is afhankelijk van het vermogen van de elektrische pomp van de pomp en is 1,05 - 1,7. Deze indicator houdt rekening met mogelijke waterlekken uit de pijpleiding als gevolg van losse verbindingen, pijplijnbreuken en andere factoren, dus de elektromotoren voor pompen moeten een bepaalde gangreserve hebben. Hoe groter het vermogen, hoe lager de veiligheidsfactor.
Bijvoorbeeld met een pompmotorvermogen van 2 kW - kz = 1,5, 3,0 kW - kz = 1,33, 5 kW - kz = 1,2, met een vermogen groter dan 10 kW - kz = 1,05 - 1,1 . Andere parameters betekenen: ηп - overdrachtsefficiëntie (directe overdracht - 1,0, V-riem - 0,98, versnelling - 0,97, vlakke tijd - 0,95), ηn - efficiëntie van zuigerpompen 0,7 - 0,9, centrifugaal 0 , 4 - 0,8, vortex 0,25 - 0,5.
Bij het kiezen van de elektromotor die het meest geschikt is voor de werking van een compressor, is het noodzakelijk om rekening te houden met de continue bedrijfsmodus van dit mechanisme en de constante belasting. De berekening van het vereiste motorvermogen P DV wordt uitgevoerd in overeenstemming met het vermogen op de as van het hoofdmechanisme. In dit geval moet rekening worden gehouden met de verliezen die optreden in de tussenverbinding van de mechanische transmissie.

Bijkomende factoren zijn de capaciteit, het doel en de aard van de productie, waarmee de compressorapparatuur wordt bediend. Ze hebben een bepaalde impact en daarom kan de apparatuur kleine maar constante aanpassingen vereisen om de prestaties op het juiste niveau te houden.
Bepaal het motorvermogen aan de hand van de formule: 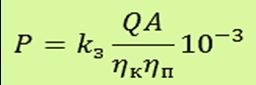 waarin:
waarin:
Werk A wordt berekend door een afzonderlijke formule: A = (Au + Aa) / 2, waarbij Au en Aa respectievelijk isotherme en adiabatische compressie voorstellen.
De waarde van het werk dat moet worden gedaan voordat de vereiste druk verschijnt, kan worden bepaald met behulp van de tabel:
|
P 2, 10 5 Pa |
||||||||
|
A, 10-3 J / m 3 |
Typische werking van de compressor wordt gekenmerkt door een continue werking. Omkeerbare elektrische aandrijvingen zijn in de regel afwezig, in- en uitschakelen is uiterst zeldzaam. Daarom is de beste optie, het verstrekken normaal werk compressoren, zal een synchrone elektromotor zijn.
Fans worden veel gebruikt in veel verschillende gebieden. Universele apparaten werken in schone lucht, bij een temperatuur onder 80 0. Lucht met meer hoge koorts beweegt met behulp van speciale hittebestendige fans. Als u in een agressieve of explosieve omgeving moet werken, worden in deze gevallen modellen van anticorrosie- en explosiebestendige apparaten gebruikt.

In overeenstemming met het werkingsprincipe kunnen ventilatorinstallaties centrifugaal of radiaal en axiaal zijn. Afhankelijk van het ontwerp, ontwikkelen ze drukken van 1000 tot 15000 Pa. Daarom wordt het benodigde vermogen om de ventilator aan te drijven berekend op basis van de druk die moet worden gegenereerd.
Hiervoor wordt de formule gebruikt: Nb = Hb · Qb / 1000 · rendement, waarbij Nb het voor de aandrijving vereiste vermogen is (kW), Hb de door de ventilator (Pa) veroorzaakte druk is, Qb het verplaatste luchtvolume (m 3 / s) , efficiëntie - prestatiecoëfficiënt.
Om het vermogen van de elektromotor te berekenen, wordt de formule gebruikt: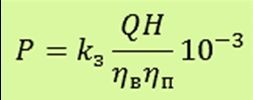 waar de parameterwaarden zijn als volgt:
waar de parameterwaarden zijn als volgt:
Met deze formule kunt u het vermogen van elektromotoren voor centrifugale en axiale ventilatoren berekenen. Voor centrifugale structuren is de efficiëntie 0,4-0,7 en voor axiale structuren 0,5-0,85. Andere ontwerpkenmerken zijn beschikbaar in speciale catalogi voor alle typen elektromotoren.
Gangreserve mag niet te groot zijn. Als deze te hoog is, zal de efficiëntie van de drive merkbaar verminderen. Bovendien kan in AC-motoren de arbeidsfactor verminderen.
Op het moment dat de motor wordt gestart, blijft de as ervan stationair. Om te kunnen ontspannen, is het nodig om een inspanning te doen, veel meer nominaal. In dit opzicht overschrijdt de startstroom ook de nominale stroom. Tijdens het afwikkelen van de as vindt een geleidelijke geleidelijke afname van de stroom plaats.
De invloed van inschakelstromen beïnvloedt de werking van de apparatuur nadelig, voornamelijk als gevolg van plotselinge spanningsdalingen. Om hun negatieve impact te verminderen, worden verschillende methoden gebruikt. Tijdens het versnellingsproces worden de motorcircuits omgeschakeld van een ster naar een driehoek frequentieomvormers en elektronische softstarters.
Aanvankelijk wordt de waarde van de nominale motorstroom berekend, in overeenstemming met het type en het nominale vermogen. Voor DC-apparaten ziet de formule er als volgt uit:
In AC-motoren wordt de nominale stroom bepaald door een andere formule:
Alle parameters hebben overeenkomstige aanduidingen:
Na het berekenen van de nominale stroom, is het mogelijk om de startstroomwaarde te berekenen aan de hand van de formule:  waarin:
waarin:
De startstroom wordt berekend voor elke motor die beschikbaar is in elektrisch circuit. In overeenstemming met de grootte wordt een stroomonderbreker geselecteerd om het hele circuit te beschermen.
De belasting van de motor wordt bepaald door de bedrijfsmodus. Het kan ongewijzigd blijven of veranderen afhankelijk van de bedrijfsomstandigheden. Bij het kiezen van een motor moet rekening worden gehouden met de aard en waarde van de verwachte belasting. Rekening houdend met deze factor, wordt het vermogen van de elektromotor berekend.
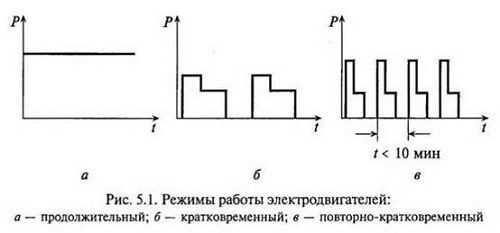
Modi waarin elektrische motoren werken: