Takmer všetky stroje sú vybavené asynchrónnymi motormi ako elektrický pohon. Majú jednoduchý dizajn a nie vysoké náklady. V tejto súvislosti je dôležité riadiť rýchlosť asynchrónneho motora. Avšak v štandardnom spínacom okruhu je možné jeho otáčky ovládať iba pomocou mechanických prevodových systémov (prevodovky, remenice), čo nie je vždy výhodné. Elektrické ovládanie otáčok rotora má viac výhod, hoci komplikuje schému zapojenia indukčného motora.
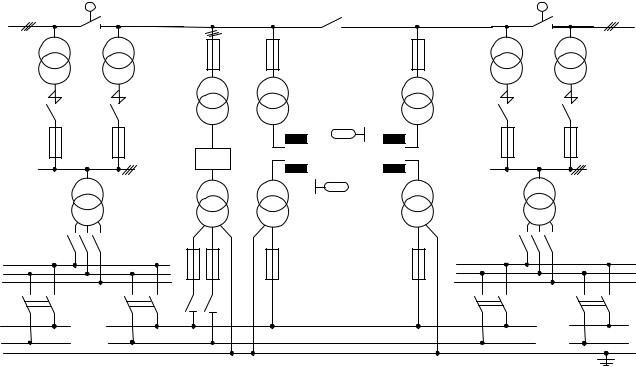
Pre niektoré súčasti automatického zariadenia je vhodná elektrická regulácia rýchlosti otáčania hriadeľa asynchrónneho elektrického motora. Toto je jediný spôsob, ako dosiahnuť hladké a presné nastavenie prevádzkových režimov. Existuje niekoľko spôsobov, ako ovládať rýchlosť otáčania manipuláciou s frekvenciou, napätím a tvarom prúdu. Všetky sú uvedené v diagrame.
Z metód uvedených na obrázku je najčastejšou reguláciou rýchlosti rotora zmena nasledujúcich parametrov:
Posledné dve metódy umožňujú zmeniť rýchlosť otáčania bez výrazného zníženia účinnosti a straty výkonu, ostatné spôsoby prispôsobenia prispievajú k zníženiu účinnosti úmerne k množstvu sklzu. Ale tí a iní majú svoje výhody a nevýhody. Vzhľadom na to, že asynchrónne motory s rotorom veveričiek sú vo výrobe najčastejšie používané, všetky ďalšie diskusie sa budú týkať tohto typu elektromotorov.
pre frekvenčná regulácia prevažne polovodičové konvertory. Ich princíp fungovania je založený na zvláštnostiach asynchrónneho motora, kde frekvencia otáčania magnetického poľa statora závisí od frekvencie napájacieho napätia. Rýchlosť otáčania statorového poľa sa určuje podľa tohto vzorca:
n1 = 60f / p, kde n1 je frekvencia otáčania poľa (rpm), f frekvencia napájacej siete (Hz), p je počet dvojíc statorových pólov, 60 je koeficient prepočtu rozmeru.
Pre účinnú prevádzku asynchrónneho motora bez straty je potrebné meniť napájané napätie spolu s frekvenciou. Napätie sa musí meniť v závislosti od momentu zaťaženia. Ak je zaťaženie konštantné, potom sa napätie mení v pomere k frekvencii.
Moderné regulátory frekvencie umožňujú znížiť a zvýšiť rýchlosť v širokom rozsahu. Tým sa zabezpečilo ich široké využitie v zariadeniach s riadeným ťahom, napríklad v multikontaktných strojoch zváraných pletiv. V nich je rýchlosť otáčania asynchrónneho motora, ktorý poháňa navíjací hriadeľ, regulovaná polovodičovým meničom. Toto nastavenie umožňuje operátorovi, ktorý sleduje správnosť technologických operácií, urýchliť alebo spomaliť v krokoch pri ladení stroja.
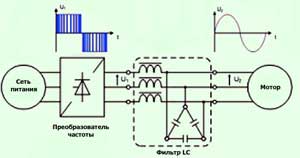
Zoberme si podrobnejšie princíp fungovania frekvenčného meniča. Vychádza z princípu dvojitej konverzie. Regulátor pozostáva z usmerňovača, impulzného meniča a riadiaceho systému. V usmerňovači sa sínusové napätie mení na konštantné napätie a napája sa do meniča. Trojfázový impulzný menič má šesť tranzistorových spínačov. Prostredníctvom týchto automatických tlačidiel sa na statorové vinutia aplikuje konštantné napätie, takže v správnom momente príde k priamemu vinutiu a spätnému prúdu s fázovým posunom 120 ° na zodpovedajúce vinutia. Takto sa konštantné napätie transformuje na striedavé trojfázové napätie požadovanej amplitúdy a frekvencie.
Požadované parametre sa nastavujú prostredníctvom riadiaceho modulu. Automatické nastavenie ovládania kľúčov sa vykonáva podľa princípu pulznej modulácie. Výkonové spínače používajú výkonné IGBT tranzistory. V porovnaní s tyristormi majú vysokú frekvenciu spínania a vytvárajú takmer sínusový prúd s minimálnym skreslením. Napriek praktickosti takýchto zariadení sú ich náklady na motory so stredným a vysokým výkonom naďalej veľmi vysoké.
 Nastavenie rýchlosti otáčania metódy asynchrónneho motora zmeny v počte dvojíc pólov sa vzťahuje aj na najbežnejšie metódy kontroly elektrických motorov vo veveričkách. Takéto motory sa nazývajú viaceré rýchlosti. Existujú dva spôsoby implementácie tejto metódy:
Nastavenie rýchlosti otáčania metódy asynchrónneho motora zmeny v počte dvojíc pólov sa vzťahuje aj na najbežnejšie metódy kontroly elektrických motorov vo veveričkách. Takéto motory sa nazývajú viaceré rýchlosti. Existujú dva spôsoby implementácie tejto metódy:
V prvom prípade, aby sa drážky vložili do drážok, je potrebné znížiť prierez drôtu a to vedie k zníženiu menovitého výkonu elektrického motora. V druhom prípade existuje komplikácia spínacieho zariadenia, najmä pri troch alebo viacerých rýchlostiach, ako aj zhoršujúcej sa energetickej výkonnosti. Podrobnejšie sú tieto a ďalšie metódy riadenia rýchlosti asynchrónneho motora opísané v archívnom súbore, ktorý je možné stiahnuť v spodnej časti stránky.
Zvyčajne sa vyrábajú viacotáčkové motory pri 2, 3 alebo 4 rotačných rýchlostiach, pričom 2-rýchlostné motory sa vyrábajú s jedným vinutím na stator a prepínajú sa počet dvojic pólov v pomere 2: 1 = p2: pt, trojrýchlostné motory - s dvoma vinutiami na stator, z ktorých jedna je vykonávaná s prepínačom 2: 1 = Pr: Pi, 4-rýchlostné motory - s dvoma vinutiami na stator, z ktorých každý je vykonávaný prepínačom počtu párov pólov v pomere 2: 1. Viacotáčkové elektromotory sú vybavené rôznymi strojmi, nákladnými a osobnými výťahmi, používajú sa na pohon ventilátorov, čerpadiel atď.
Významnou nevýhodou asynchrónnych elektromotorov je pomerne zložitá regulácia frekvencie ich otáčania.
Možné spôsoby riadenia rýchlosti otáčania asynchrónnych elektromotorov možno stanoviť analýzou výrazu zaznamenaného pre rýchlosť rotora motora: n 2 = 60f 1 (1 ‑s)/p, Analýza vzorca ukazuje, že rýchlosť otáčania indukčného motora môže byť zmenená zmenou sklzu rotora spočet dvojíc pólov rmotor alebo frekvenciu f 1 napájacie napätie.
Riadenie frekvencie posuvnými odchýlkami je možné zmenou napätia na statorovom vinutí alebo zmenou aktívneho odporu v obvode rotora.
Kontrola frekvencie aktívnou zmenou odporuje možné len pre asynchrónne motory s fázovým rotorom, vo vinutí ktorého (pomocou kĺzavých krúžkov) je zapnutý dodatočný nastavovací odpor rovnakým spôsobom ako pri štartovaní motora. Odolnosť pri rozjazde však nie je vhodná na reguláciu otáčok, pretože nie je konštruovaná na nepretržitú prevádzku. Nastavenie odporu musí odolávať prúdom, ktoré sú porovnateľné s rozbehom, po dlhú dobu.
S nárastom aktívneho odporu obvodu rotora je hodnota kritického sklzu rotora motora s v súlade s vyššie uvedeným vzorcom sa zvyšuje.
Vrátane rôznych dodatočných odporov je možné získať rodinu mechanických charakteristík motora, ako sú tie, ktoré sú znázornené na obr. 11, z čoho vyplýva, že s nárastom aktívneho odporu v okruhu rotora s konštantným momentom zaťaženia na hriadeli motora prebieha pracovný bod z jednej mechanickej charakteristiky na druhú, čo zodpovedá novému zvýšenému odporu. Existuje zvýšenie sklzu rotora a následne zníženie frekvencie otáčania rotora indukčného motora. Regulácia pomocou tejto metódy je možná v širokom rozsahu sklzu, ale s klesajúcou frekvenciou, tuhosť mechanickej charakteristiky je narušená a elektrické straty vzrastú.
Riadenie rýchlosti zmenou napájacieho napätiačo je možné vzhľadom na skutočnosť, že kritická hodnota momentu M k, a teda aj hodnotu M(s) pri akomkoľvek sklzu je úmerná štvorcu napájacieho napätia U 1 2. Z kriviek znázornených na obrázku 12 je zrejmé, že s konštantným momentom zaťaženia na hriadeli motora prebieha pracovný bod z jednej mechanickej charakteristiky na druhú, čo zodpovedá novému zníženému napätiu U 1. Existuje zvýšenie sklzu rotora a následne zníženie frekvencie otáčania rotora indukčného motora. Regulácia asynchrónneho motora pomocou tejto metódy je možná iba v malom rozsahu sklzu, ktorý je obmedzený kritickým momentom a sklzom rotora.
Treba poznamenať, že keď sa napätie znižuje, dochádza k prudkému poklesu kritického krútiaceho momentu motora, ktorý je úmerný štvorcu napätia, a teda prudké zníženie preťažiteľnosti motora z hľadiska množstva kritického krútiaceho momentu, čo obmedzuje rozsah použitia opísaného spôsobu.
Kroková regulácia rýchlosti otáčania asynchrónneho motora s rotorom vo veveričke, ako je naznačené, je možná zmeny v počte dvojíc pólovv dôsledku prepínania častí jeho vinutia, ktoré sa používajú pre viacotáčkové motory. Podstata metódy spočíva v tom, že pri konštantnej frekvencii napájacieho napätia závisí otáčavosť indukčného motora na počte dvojíc pólov statorového vinutia. Pokiaľ sú teda na stator asynchrónneho motora umiestnené dve alebo viac samostatných vinutia s rôznym počtom párov pólov, potom je každé pripojenie na sieť samostatné, je možné získať rôzne frekvencie otáčania magnetického poľa a teda rotora. Táto ekonomická a relatívne jednoduchá metóda bohužiaľ neumožňuje plynulé nastavovanie otáčok motora. Priemysel zvládol výrobu sérií elektromotorov, ktorých otáčky sú regulované v krokoch 2, 3 a 4 krát bez straty výkonu. Treba tiež poznamenať, že návrh viacotáčkových elektromotorov je oveľa komplikovanejší ako jednorýchlostné elektrické motory, čo vedie k ich zhodnoteniu.
Rýchlosť otáčania asynchrónneho motora môže byť tiež nastavená. zmena frekvencie napájacieho prúdu, ale táto metóda sa prakticky nepoužíva pre výkonné motory kvôli nedostatku jednoduchých a nákladovo efektívnych zariadení, ktoré regulujú frekvenciu prúdu v obvodoch s vysokým výkonom. Vývoj a priemyselný rozvoj silných a lacných riadených polovodičových zariadení (diódy, tyristory) umožňuje realizáciu jednoduchých a spoľahlivých frekvenčných meničov a nízkonapäťových meničov výkonu, pomocou ktorých môžete ľahko nastaviť rýchlosť otáčania asynchrónneho elektromotora so skratovaným rotorom, čo výrazne zjednodušuje pohon rôznych mechanizmov, zatiaľ čo často nie sú potrebné prevodovky, prevodovky, prevodovky.
Strana 17 z 51
Asynchrónne motory sú základom modernej AC mechaniky. Účinnosť tohto elektrického pohonu je z veľkej časti určená možnosťou regulácie rýchlosti.
Možnosti asynchrónnych motorov z hľadiska riadenia rýchlosti rotora sú určené výrazom
.
Z tohto výrazu vyplýva, že frekvencia otáčania sa dá upraviť troma spôsobmi: zmenou frekvencie, počtom dvojíc pólov p a skĺznuť s, Zvážte každú z týchto metód podrobnejšie.
Táto metóda je v súčasnosti najsľubnejšia. Zmena frekvencie sa vykonáva pomocou polovodičového frekvenčného meniča (obrázok 4.28, a). Súčasne so zmenou frekvencie je tiež regulované napätie, aby sa zabezpečila stálosť magnetického toku. Z výrazu súvisiaceho s napätím F,
,
z toho vyplýva, že napätie musí byť nastavené v pomere k frekvencii
![]() .
.
Odchýlka od tohto zákona vedie k zmene toku Fčo je nežiaduce. V skutočnosti, s rastúcim tokom sa zvyšuje nasýtenie magnetického obvodu, straty ocele a zvyšuje sa magnetizujúci prúd. Zníženie prietoku spôsobuje pokles maximálneho krútiaceho momentu motora a počet ďalších nežiaducich javov.
na ![]() mechanické charakteristiky motora sú znázornené na obr. 4.28 b druh. Znížením frekvencie počiatočného krútiaceho momentu motora sa zvyšuje a maximálne mierne klesá. Pracovný sklz motora zostáva malý, čo charakterizuje ekonomický režim prevádzky motora. Náklady na túto metódu riadenia frekvencie otáčania motora sú však veľmi vysoké, pretože frekvenčný menič sa musí vykonávať pri plnom výkone motora.
mechanické charakteristiky motora sú znázornené na obr. 4.28 b druh. Znížením frekvencie počiatočného krútiaceho momentu motora sa zvyšuje a maximálne mierne klesá. Pracovný sklz motora zostáva malý, čo charakterizuje ekonomický režim prevádzky motora. Náklady na túto metódu riadenia frekvencie otáčania motora sú však veľmi vysoké, pretože frekvenčný menič sa musí vykonávať pri plnom výkone motora.
Táto metóda regulácie, na rozdiel od predchádzajúcej, umožňuje meniť rýchlosť otáčania iba v krokoch. Používa sa v mechanizmoch ako dúchadlá, dopravníky, výťahy, výťahy. Motory s prepínacím počtom párov stožiarov sú volané viacrýchlostnej, Asynchrónne motory s viacerými otáčkami sa zvyčajne vykonávajú v dvoch, troch a štyroch krokoch. Dvojrýchlostné motory sa vyrábajú s jedným vinutím, ak čísla dvojice pólov zodpovedajú nasledujúcemu vzťahu:
.
Tri a štyrirýchlostné motory sú dostupné s dvoma vinutiami. Pri trojrýchlostných motoroch sa vykoná iba jedno navíjanie so spínaním počtu párov pólov a vo štvorrých motoroch sú obe vinutia vykonávané ako dvojrýchlostné. Navíjanie rotora viacotáčkových motorov je skratované. Nevyžaduje prepínanie schémy pripojenia, pretože požadovaný počet dvojic pólov navíjania rotora je vytvorený automaticky statorovým poľom.
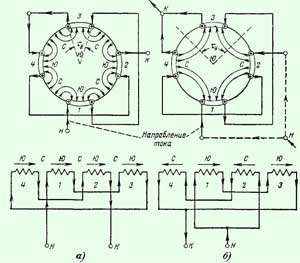
Zmena počtu pólov sa vykonáva zmenou schémy pripojenia statorových vinutí. Na obr. 4.29 ukazuje tri varianty spojovacích sekcií.
Možnosť "a" zodpovedá konzistentnému začleneniu úsekov, v tomto prípade sa vytvára magnetické pole s pólmi. V možnosti "b" sa druhá časť zapne postupne. Výsledné pole má póly. Napätie navíjania zostáva nezmenené, ![]() a moment vyvíjaný motorom sa znižuje na polovicu,
a moment vyvíjaný motorom sa znižuje na polovicu, ![]() , V možnosti "b" sa druhá časť zapne v antiparalelnom režime. Výsledné pole bude mať tiež póly, ale silu vinutia
, V možnosti "b" sa druhá časť zapne v antiparalelnom režime. Výsledné pole bude mať tiež póly, ale silu vinutia ![]() zdvojnásobuje a krútiaci moment motora zostáva konštantný
zdvojnásobuje a krútiaci moment motora zostáva konštantný ![]() .
.
 |
Preto, aby sa zmenil počet párov pólov, je nevyhnutné, aby každá fáza vinutí pozostávala z dvoch identických častí. Keď obe časti prúdia prúdy rovnakého smeru, počet pólov, keď sa v jednom z nich zmení smer prúdu, sa počet pólov zníži na polovicu. Pri prepínaní počtu pólov z jedného na druhého sa rozdelenie pólov znižuje na polovicu, pričom fázová zóna trojfázového vinutia sa mení z 60 ° na 120 ° (obrázok 4.30).
Pretože fázová rotácia obidvoch rýchlostí by mala zostať rovnaká, okrem zmeny smeru prúdov v zónach je potrebné vymeniť obe fázy vinutia. Pri väčšom počte pólov je vinutie vykonávané v priemere. Potom s menej pólov.
Malý krok vedie k zhoršeniu používania vinutia a následne k určitému zníženiu technickej a ekonomickej výkonnosti motora.
Viacotáčkové motory sú navrhnuté pre rôzne prevádzkové režimy. Najbežnejšie režimy s konštantným krútiacim momentom a konštantným výkonom. Regulácia frekvencie otáčania s konštantným krútiacim momentom je zabezpečená, keď sa navíjanie prepína z hviezdy na obvod s dvojitou hviezdou (obrázok 4.31).
Pri takomto prepínači sa prúd spotrebovaný zo siete dvakrát zvýši a následne aj výkon motora, zatiaľ čo moment sa nemení.
Posun indukčného motora sa môže meniť rôznymi spôsobmi: zmenou napätia pôsobiaceho na stator, zavedením odporu do okruhu rotora alebo zavedením dodatočného impulzu do obvodu rotora.
Pri zmene statorového napätia sa mení mechanická charakteristika motora, ako je znázornené na obr. 4.33. Zníženie napätia vedie k zníženiu tuhosti mechanickej charakteristiky a zvýšeniu sklzu. Zároveň rýchlosť rotora klesá,
.
Riadenie rýchlosti týmto spôsobom je možné v obmedzenom rozsahu odchýlok preklzu.
.
Hlavnou nevýhodou tohto spôsobu riadenia rýchlosti otáčania je nízka účinnosť v dôsledku zvýšenia strát v navíjaní rotora v pomere k frekvencii sklzu
.
 |
Preto sa vzťahuje len na motory s nízkym výkonom pracujúce v automatických riadiacich systémoch.
Pri motoroch s fázovým rotorom sa otáčky môžu meniť zmenou odporu v rotoru (obrázok 4.34).
Výhodou tejto metódy riadenia frekvencie je, že maximálny krútiaci moment zostáva nezmenený. Je tiež dôležité poznamenať, že časť straty motora sa vykonáva v rezistore, čím sa uľahčuje tepelný režim motora. Zvyšok spôsobu je podobný predchádzajúcemu a vyznačuje sa nízkou účinnosťou, malým rozsahom riadenia v závislosti od zaťaženia a "mäkkou" mechanickou charakteristikou.
Ak chcete zvýšiť účinnosť motora pri nastavovaní rýchlosti otáčania zmenou sklzu, je potrebné použiť sklzovací výkon, aby ste urobili užitočnú prácu alebo ju vrátili do siete. Ide o schémy, ktoré implementujú túto myšlienku kaskádovito, Jeden zo spoločných obvodov tohto typu je kaskádový obvod asynchrónneho ventilu (obr. 4.35).
Schéma zahŕňa asynchrónny motor s fázovým rotorom (BP), diódovým usmerňovačom (D), vyhladzovacím tlmivým členom (DR), tyristorovým meničom (I) a sieťovým transformátorom (Tr). Regulácia rýchlosti sa vykonáva zmenou napätia meniča. To vedie k zodpovedajúcej zmene napätia navíjania rotora a tým k frekvencii otáčania rotora. Výkon frekvencie sklzu vytiahnutého z navíjania rotora motora sa prenáša do siete prostredníctvom zodpovedajúceho transformátora.
Výhodou kaskádových riadiacich obvodov pre rýchlosť otáčania asynchrónnych motorov v porovnaní s obvodmi riadenia frekvencie v obvode statora (obrázok 4.28) je to, že polovodičový menič je vykonávaný na kĺzavom výkone a nie na plnom výkone motora. Táto okolnosť je obzvlášť dôležitá pre vysokovýkonné a super výkonové pohony čerpadiel, lisov, dopravníkov, zdvíhacích mechanizmov atď., Kde je potrebný obmedzený rozsah riadenia otáčok (2: 1 a menej).
Asynchrónna kaskáda ventilov s neriadeným usmerňovačom umožňuje reguláciu len smerom nadol od synchronnej rýchlosti. Ak používate riadený usmerňovač, môžete nastaviť rýchlosť zo synchronizácie. V takomto prípade je smer prevodu kĺzavého výkonu obrátený.