4-6. VÝPOČET DC ELEKTRICKÉHO MOTORA
Výpočet začína elektromotorom jednosmerný prúd, pretože jeho výpočet je jednoduchší a jasnejší ako elektromotory aC prúd, Tu je detailné vysvetlenie všetkých vypočítaných hodnôt, ktoré potom nájdeme v striedavých motoroch. Výpočet je určený pre bipolárne elektromotory s postupným budením.
Vzhľadom na výkon, rýchlosť a napätie motora môžete určiť všetky rozmery a údaje o navíjaní elektromotora. Výpočet elektrického motora začína určením dvoch hlavných rozmerov, ktorými sú priemer a dĺžka armatúry. Tieto rozmery sú zahrnuté do vzorca:
kde D je priemer kotvy, m; l je dĺžka kotvy, m; R i - menovitý výkon, W; A - lineárne zaťaženie armatúry, A / m; B - magnetická indukcia vo vzduchovej medzere, T; n - menovitá frekvencia otáčania, otáčky za minútu.
Dĺžka a priemer kotvy elektromotora sú vyjadrené v metroch, pretože výpočtové vzorce, ktoré spájajú rozmery motora s indukciou a prietokom, sú pohodlnejšie a jednoduchšie. Výsledky výpočtu získané v metroch na praktické účely pri výrobe rôznych častí sa dajú ľahko previesť na centimetre alebo milimetre.
Ľavá strana vzorca je úmerná objemu kotvy. V skutočnosti, ak ho vynásobíte π a rozdeľte o 4, dostanete objem valca, ktorý je kotvou elektrického motora. Ako je zrejmé z pravej strany vzorca, objem kotvy je úmerný výkonu motora P i a nepriamo úmerný frekvencii otáčania n. Z toho možno vyvodiť, že čím väčšia je frekvencia otáčania kotvy motora, tým menšie budú jeho rozmery pri rovnakom výkone. Veľkosti a iné časti elektrického motora závisia od veľkostí kotvy.
Menovitý výkon elektrického motora, W
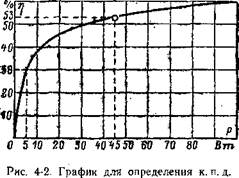
kde E je e. D. s. Indukovaný v vinutí kotvy počas jeho otáčania v magnetickom poli, V; I je prúd spotrebovaný motorom zo zdroja A; P je menovitý výkon elektrického motora W; η je účinnosť elektrického motora, ktorej hodnota sa môže odobrať pozdĺž krivky z obr. 4-2; Ako je zrejmé z krivky, hodnoty účinnosti sa znižujú pri znižovaní výkonu elektrického motora.
Číselná hodnota vypočítaného výkonu sa získa riešením (4-2), kde sú známe hodnoty všetkých množstiev. Vypočítaný výkon je vždy väčší ako menovitý výkon elektrického motora, pretože súčasť dodanej energie sa stratí v samotnom elektrickom motore.
Prúd spotrebovaný elektromotorom A,
kde P je menovitý výkon W; U - menovité napätie, V; η je efektívnosť pozdĺž krivky na obr. 4-2.
Teraz môžete definovať a e. d. a. E, ktoré budú potrebné v budúcnosti:
kde N je počet vodičov v navíjaní armatúry; multiplikátor 2 v menovateli ukazuje, že celkový prúd 1 kotvy z vidlic kolektorovej dosky medzi dvoma vodičmi navíjania a len polovica prúdu prechádza cez každý vodič; výrobok πD vyjadruje obvod kotvy.
Takže lineárne zaťaženie ukazuje koľko ampérov na 1 m dĺžku obvodu kotvy. Lineárne zaťaženie A a magnetická indukcia vo vzduchovej medzere B sa nazývajú elektromagnetické zaťaženie. Ukazujú, ako elektrický motor je ťažký z elektrického a magnetického pohľadu. Z (4-1) je jasné, že čím väčší je produkt AB, tým menšia bude kotva. Hodnoty A a B by však nemali prekročiť určitý limit, pretože inak bude počas prevádzky elektromotor veľmi horúci.
Ohrev elektrického motora však závisí nielen od elektromagnetického zaťaženia, ale aj od času jeho prevádzky. Niektoré elektrické motory pracujú dlhší čas bez zastavenia, napríklad elektromotory ventilátorov. Ostatné elektromotory prerušujú prevádzku, počas ktorej ochladzujú napríklad elektrické motory modelov žeriavov, elektrických prehrávačov a vysávačov. Práca elektromotorov s prerušeniami sa nazýva prerušovaná. To znamená, že elektromotor sa krátko zapne, potom dôjde k prerušeniu a elektrický motor sa znova zapne.
Trvanie zahrnutia takéhoto elektrického motora je vyjadrené ako percento určitého časového intervalu, ktoré sa odoberá počas 10 minút. Napríklad, ak elektromotor beží po dobu 2,5 minút a zvyšok času je vyšší, čas zapnutia je 25%. Ak motor beží 4 minúty, trvanie zahrnutia 40%.
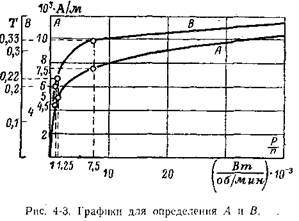
Voľba lineárneho zaťaženia a magnetickej indukcie sa uskutočňuje podľa kriviek na obr. 4-3, kde pomer nominálneho výkonu k menovitá frekvencia rotácie. Na obr. 4-3 sú uvedené hodnoty A a B pre elektrické motory s dlhým režimom prevádzky. Napríklad, ak elektromotor s výkonom 80 W pri otáčkach 4000 ot./min nepretržite pracuje pri plnom zaťažení, potom na vodorovnú os vyčnieme hodnotu 80/4 000 = 20 10 -3. Na vertikálnej línii počítame hodnotu lineárneho zaťaženia A = 9 000 A / m a indukciu vo vzduchovej medzere B = 0,35 T.
Pri prerušovanej prevádzke s časovým oneskorením 25% sa hodnoty elektromagnetického zaťaženia môžu zvýšiť o 30%, t. J. Ich vynásobiť 1,3-krát. potom
A = 9000 1,3 = 11 700 A / m,
a magnetickou indukciou
B = 0,35 1,3 = 0,455 T.
Označme l / d = e. Hodnota e pre malé elektromotory sa pohybuje od 0,4 do 1,6. Ak je potrebné získať elektromotor s menšou dĺžkou, ale s väčším priemerom, potom použijeme e = 0,4. Naopak, ak by mal byť elektrický motor zmiešaný do rúry malého priemeru, potom sme zvolili e = 1,6. Ak rozmery elektromotora nesúvisia s žiadnymi podmienkami, potom zvyčajne berú e = 1. Predstavujeme pomer l / D = e v ľavej časti (4-1), oslobodený od jedného neznámeho l a (4-1) má tvar:
Definovaním D nájdeme l = De. Preto sú určené hlavné rozmery elektromotora.
Teraz sa obrátime na výpočet vinutia kotvy. Preto je potrebné určiť magnetický tok elektrického motora.
Ak sa magnetická indukcia vo vzduchovej medzere vynásobí plochou, cez ktorú vstupujú sily silnice do kotvy, získame magnetický tok elektrického motora, ktorý označujeme gréckym písmom F (phi):
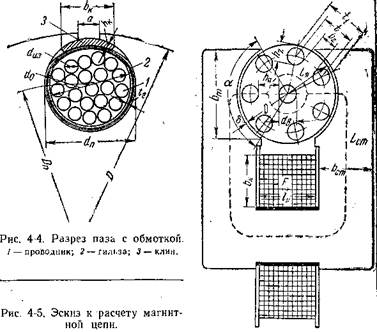
Magnetický tok sa meria v weber. Grécke písmeno τ (tau) označuje rozdelenie pólov, to znamená časť kruhu kotvy, ktorá spadá na jeden pól. V bipolárnom motore je rozdelenie pólov τ = πD / 2. Grécke písmeno a (alfa) označuje, ktorá časť oddelenia pólu je obsadená oblúkom pólu b t (obrázok 4-5). Zvyčajne trvá a = 0,65. Výrobok ατl teda udáva plochu pólu, ktorý smeruje k kotve.
Počet drážok kotvy sa stanoví z pomeru Z3D, v ktorom je priemer kotvy vyjadrený v centimetroch. Odporúča sa vziať čo najbližšie k prijatému nepárnemu číslu. Počet vodičov kotvy je určený vzorcom
Počet vodičov v jednom slotu N z = N / Z. Počet N z získaných vo výpočte by sa mal zaokrúhliť na najbližšie rovnomerné celé číslo, aby sa navíjanie mohlo navinúť do dvoch vrstiev. Voľba počtu drážok a počtu vodičov bude jasná z číselného príkladu výpočtu elektrického motora.
Prierez drôtu pre vinutie kotvy možno určiť tak, že prúd vo vodiči rozdelíme prúdovou hustotou. Hustota prúdu udáva, koľko ampérov prechádza cez každý štvorcový milimetr drôtu a je označené gréckym písmenom A (delta). Prierez drôtu, mm 2,
Hustota prúdu pre samočinné jednosmerné motory by sa mala zvoliť od 6 do 12 A / mm 2. Pre malé motory s vysokou frekvenciou otáčania sa prúdová hustota bližšie k hornej odporúčanej hodnote. Väčšie motory s nižšou rýchlosťou sú bližšie k nižšej hodnote.
Táto časť vodičov je predbežná. V druhom stĺpci tabuľky. 4-1, musíte nájsť prierez štandardného vodiča, ktorý je najbližší k vypočítanému vodiču. V prvom stĺpci tejto tabuľky nájdeme priemer drôtu d. Neprítomnosť drôtu s požadovaným priemerom nemôže zabrániť výrobe elektrického motora, pretože existujú veľké príležitosti na výmenu drôtu. Po prvé, jeden drôt môže byť nahradený dvomi drôtmi, ak je prierez týchto drôtov rovnaký ako ten vodič, ktorý sa má nahradiť. Prierez drôtu závisí od štvorca jeho priemeru, čo znamená, že pri drôte s prierezom 2 krát menším bude priemer √ 2 krát menší. Napríklad namiesto drôtu s priemerom 0,29 mm môžete mať dva drôty s priemerom 0,2 mm. V tomto prípade je prúdová hustota takmer nezmenená, ale počet drôtov v drážke sa zvýši o 2 krát. Hustota plnenia drážky drôty sa tiež zvýši, pretože každý drôt má dvojvrstvovú izoláciu. Natočenie takéhoto vinutia bude ťažšie. Je možné nahradiť jeden drôt dvoma rôznymi priemermi. Napríklad namiesto drôtu s priemerom 0,29 mm môžete mať dva drôty: jeden s priemerom 0,31 mm a druhý s priemerom 0,27 mm. Ako je vidieť z tabuľky. 4 1 je súčet prierezov dvoch náhradných drôtov rovnaký ako prierez drôtu, ktorý sa má nahradiť:
0,075 + 0,057 = 0,132 mm2.
Výber konečného priemeru d, je potrebné pre tabuľku. 4-2 určiť priemer izolovaný drôt d od, pridanie obojstrannej hrúbky δ izolácie:
Určte veľkosť drážky. Prierez drážky S, mm 2, potrebný na umiestnenie vinutia, sa môže vypočítať podľa vzorca:
kde k s je koeficient plnenia drážok, ktorý ukazuje, ako tesne vodiče plnia drážku.
Čím je faktor plnenia menší, tým väčšia musí byť plocha drážky. Čím väčší je faktor zaťaženia a čím hustejšia je izolácia drážky, tým ťažšie je navíjanie vinutia. Pri samomazdených elektromotoroch sa odporúča izolovať pomocou zárezového objímky 2 z lepenky s hrúbkou 0,2 mm. V hornej časti navíjania je klin 3 vyrobený z lepenky s hrúbkou 0,3 mm (obr.4-4) do drážky. Vo výpočtoch môžete použiť koeficient plnenia k 3 = 0,4.
V prefabrikovaných elektromotorech majú drážky komplexný tvar hrušiek (pozri obr. 2 až 10), takže môžu prijímať viac vodičov bez oslabenia hrúbky zubov medzi drážkami. V samostatne vyrábaných elektromotorech je najjednoduchšie vŕtať okrúhle drážky do lisovaného jadra kotvy (obr.4-5).
Priemer drážky je určený jeho prierezom:
Vzdialenosť medzi stredmi susedných drážok, mm
a hrúbka zuba, mm,
Hrúbka zuba v úzkom mieste musí byť aspoň 2 mm. Ak je výpočtom hrúbka zuba menšia ako 2 mm, je potrebné zvýšiť priemer kotvy. Drážka drážky by mala byť o 1 mm väčšia ako priemer izolovaného drôtu.
Počet kolektorových dosiek v elektromotoroch pre nízke napätie (12 V a nižšie) sa považuje za rovnaký ako počet otvorov pre armatúry. Umiestnenie vinutia kotvy v drážkach a ich pripojenie k kolektorovým doskám sú popísané v kapitole. 5. Prierez uhlíkovej a grafitovej kefy S y, cm 2 sa vyberá podľa vzorca:
kde? u - prúdová hustota pod štetcom ,? u = 5 ÷ 8 A / cm2.
Výpočet kotvy končí.
Obrátime sa na výpočet magnetického systému a budiaceho vinutia. Pri improvizovanom elektrickom motore je najjednoduchším spôsobom použiť magnetický systém otvoreného typu (obrázok 4-5). Vo výpočte je najprv určená vzduchová medzera δ medzi kotvou a pólmi. Pri DC strojoch je veľkosť vzduchovej medzery určená vzorcom
Uhol oblúka pólu možno nájsť pomocou hodnoty a = 0,65. Polovica obvodu je 180 °; a = 180 ° 0,65 = 117 °, zaokrúhlené na 120 °.
Veľkosť magnetického obvodu sa vypočíta podľa odporúčanej magnetickej indukcie vo svojich oblastiach. Pri výpočte prierezu pólov a rámu sa magnetický tok zvyšuje o 10%, pretože niektoré z priamok sa nachádzajú medzi bokmi rámu a obchádzajú kotvu. Preto je magnetický tok pólov a rámový článok F = 1,1 F.
Indukcia v ráme má článok B = 0,5 T. Dĺžka elektrického vedenia v rámci L st určeného skicou (obrázok 4-5). Tu bodkovaná čiara zobrazuje cestu magnetického toku. Skladá sa z týchto častí: dve vzduchové medzery, dva zuby, kotva a lôžko. Ak chcete zistiť, ktoré n. a. by mala vytvoriť excitačnú cievku, je potrebné vypočítať n. a. (Iw) pre každú z týchto sekcií a potom všetky zložené. Začnime výpočet n. a. od vzduchovej medzery.
Magnetická sila dvoch vzduchových medzier:
kde δ je vzduchová medzera na jednej strane kotvy, m; k δ je koeficient vzduchovej medzery, ktorý zohľadňuje, koľko sa zvyšuje magnetický odpor vzduchovej medzery v dôsledku prítomnosti drážok v kotve; môže byť považované za k δ = 1,1; B - indukcia vo vzduchovej medzere, T.
Určiť n. a. zuby kotvy musia poznať indukciu v zube. Hrúbka zuba je určená (4-12). Magnetický tok vstupuje do zuba cez časť obvodu kotvy, ktorá je obsadená jednou korunou zuba a jednou štrbinou drážky. Označuje sa ozubené rozdelenie t 1 a je určené vzorcom
Indukcia v zube bude toľkokrát viac ako indukcia vo vzduchovej medzere, koľkokrát hrúbka zuba je menšia ako zubovité rozdelenie. Okrem toho treba poznamenať, že časť dĺžky kotvy je obsadená izolačnými vrstvami medzi vrstvami oceľových kotiev, ktoré tvoria približne 10%. Preto indukcia v zube môže byť určená vzorcom
Táto indukcia na stole. 4-3 zodpovedá intenzite poľa H z. Na výpočet n. a. dvojnásobok výšky zuba, je potrebné vynásobiť H z dvojitou výškou zuba. Avšak vzhľadom na to, že s kruhovými drážkami klesá indukcia v hornej a dolnej časti zuba, vynásobte H z výškou jedného zuba lw z = H z h z.
Pri výpočte indukcie v jadre kotvy je potrebné vziať do úvahy, že magnetický tok v ňom je rozvetvený a preto len jedna polovica toku zodpovedá jednému úseku. Prierez jadra kotvy podľa obr. 4-5 sa rovná vzdialenosti od základne drážky k hriadeľu vynásobenej dĺžkou kotvy l:
Je tiež potrebné vziať do úvahy izolačné vrstvy medzi listami. Teda indukcia v jadre kotvy
Táto indukcia na stole. 4-3 zodpovedá Hj. Magnetizačná sila jadra kotvy:
kde L i je dĺžka sily v jadre, m, podľa obr. 4-5:
Ako je vidieť na obr. 4-5 tento elektromotor nemá žiadne vyčnievajúce tyče, ktoré sa zlúčili s rámom. Preto sa výpočet pevnej časti magnetického obvodu zníži na výpočet lôžka. Šírka rámu je určená danou indukciou B = 0,5 T, m,
Hustota poľa Hst pre indukciu 0,5 T je uvedená v tabuľke. 4-3. Pri určovaní dĺžky sily v rámčeku sa stretávame s ťažkosťami, pretože dĺžka strany rámu závisí od hrúbky cievky a stále ju nevieme. Z tohto dôvodu vezmeme hrúbku cievky b do = 30 δ, kde δ je vzduchová medzera. Vzťah medzi hrúbkou cievky a medzerou je spôsobený skutočnosťou, že n závisí hlavne od veľkosti medzery. a. cievky a tým aj veľkosť cievky. Určenie dĺžky sily v rámci L st môžete vypočítať n. a. rám:
Teraz pridáme n. a. všetky stránky:
Takéto č. a. by mal vytvoriť cievku, keď motor beží vo voľnobehu. Ale pri zaťažení, keď prúd v armatúre rastie, sa objaví demagnetizujúci efekt. magnetické pole kotva. Preto n. a. cievka by mala mať určitú rezervu, ktorá sa vypočíta podľa vzorca
Preto n. a. cievky so zaťažením motora
![]()
Proces kotvy prechádza budiacou cievkou a preto počet závitov cievky bude w = Iw / I.
Na určenie prierezu vodiča by mal byť prúd rozdelený prúdovou hustotou. Zoberie sa menej ako pri vinutí kotvy, pretože závit cievky je pevný a preto horšie chladený.
Prierez cievky, mm 2, s = I /?.
Podľa tabuľky. 4-1 nájdeme najbližší štandardný prierez a priemer drôtu. Po výbere značky drôtu podľa tabuľky. 4-2 nájdeme priemer izolovaného drôtu d pz. Ak chcete zistiť hrúbku cievky, potrebujete poznať oblasť, mm 2, obsadenú závitmi cievky, ktorú možno určiť podľa vzorca
Rozdelenie oblasti o dĺžku cievky, ktorá je v náčrte označená l, dostaneme hrúbku cievky, mm,
Takže podľa menovitých údajov elektromotora, ktoré sú vyjadrené iba v troch číslach pomocou vzorcov a tabuliek, sme určili všetky rozmery elektromotora, ktoré sú potrebné na jeho výrobu. Vypočítaný elektrický motor bude spoľahlivo pracovať a jeho vykurovanie neopustí prípustné normy. Toto je hodnota výpočtu elektrického motora. Bolo by možné "odhadnúť" všetky tieto rozmery bez výpočtov? Pravdepodobne by musel byť elektromotor niekoľkokrát vykreslený, aby sa dosiahol uspokojivý výsledok, pretože sa stali niekoľkokrát viac času na týchto zmenách ako na výpočte, nehovoriac o poškodených materiáloch. Okrem toho sa v procese výpočtu dostanete zručnosť technických výpočtov a znalostí teórie elektrických vozidiel.
NV Vinogradov, Yu.N. Vinogradov
Ako vypočítať a vyrobiť elektrický motor
Moskva 1974
Podmienky pre výber elektrického motora
Výber jedného z katalógových typov elektromotorov sa považuje za správny za nasledujúcich podmienok:
a) najkompletnejšia zhoda pracovného stroja (pohonu) s elektromotorom na mechanických vlastnostiach. To znamená, že elektromotor musí mať takú mechanickú charakteristiku, pri ktorej by mohol informovať pohon o potrebných hodnotách rýchlosti a zrýchlenia, a to počas prevádzky aj počas štartu;
b) maximálne využitie výkonu motora v procese. Teplota všetkých aktívnych častí elektromotora v najťažších prevádzkových režimoch by mala byť čo najbližšie k teplote vykurovania stanovenej normami, ale nesmie byť vyššia ako teplota;
c) zhoda elektrického motora s pohonom a environmentálne podmienky pre konštrukciu;
d) súlad motora s parametrami jeho napájacej siete.
Pri výbere elektrického motora sú potrebné nasledujúce počiatočné údaje: 
a) názov a typ mechanizmu;
b) maximálny výkon na hnacom hriadeli mechanizmu, ak je režim prevádzky kontinuálny a zaťaženie je konštantné a v iných prípadoch - grafy zmeny výkonu alebo momentu odporu ako funkcia času;
c) rýchlosť otáčania hnacieho hriadeľa mechanizmu;
d) spôsob združenia mechanizmu s hriadeľom motora (v prítomnosti prevodových stupňov je uvedený typ prevodového stupňa a prevodový pomer);
e) množstvo krútiaceho momentu pri štartovaní, ktoré by elektromotor mal poskytovať na hnacom hriadeli mechanizmu;
e) limity regulácie rýchlosti poháňaného mechanizmu s uvedením hornej a dolnej hodnoty rýchlostí a zodpovedajúcich hodnôt výkonu a krútiaceho momentu;
g) povahu a kvalitu (plynulosť, nadmorskú výšku) požadovanej regulácie rýchlosti;
h) frekvenciu štartu alebo štartu pohonu v priebehu jednej hodiny; a) environmentálne charakteristiky.
Voľba elektrického motora založená na zohľadnení všetkých podmienok sa vykonáva podľa katalógových údajov.
V prípade mechanizmov širokého použitia je výber elektrického motora výrazne zjednodušený údajmi obsiahnutými v príslušných informáciách výrobcov a zmiernil sa s uvedením typu elektromotora vzhľadom na sieťové parametre a charakter prostredia.
Výber výkonu motora
Výber výkonu motora by mal byť v súlade s povahou zaťaženia pracovného stroja. Tento znak sa hodnotí z dvoch dôvodov: 
a) podľa nominálneho režimu prevádzky;
b) zmeny spotreby energie.
Existujú nasledujúce režimy činnosti:
a) dlhé (dlhé), keď je pracovná doba tak dlhá, že vykurovanie elektromotora dosiahne svoju hodnotu v ustálenom stave (napríklad v čerpadlách, pásových dopravníkoch, ventilátoroch atď.);
b) krátkodobo, ak doba trvania pracovnej doby nie je dostatočná na dosiahnutie teploty vykurovania elektromotorom zodpovedajúcim tomuto zaťaženiu a stopovacie doby naopak postačujú na ochladenie elektromotora na teplotu okolia. V tomto režime môžu elektromotory prevádzkovať rôzne mechanizmy;
c) prerušovane - s relatívnou dobou aktivácie 15, 25, 40 a 60% s trvaním jedného cyklu najviac 10 minút (napríklad pri žeriavoch, niektorých strojoch, generátoroch motorov na zváranie jedným operátorom atď.).
Podľa zmien spotreby energie sa líšia tieto prípady:
a) konštantné zaťaženie, keď je množstvo spotrebovanej energie počas prevádzky konštantné alebo má malé odchýlky od priemernej hodnoty, ako napríklad odstredivé čerpadlá, ventilátory, kompresory s konštantným prietokom atď.
b) premenné zaťaženiekeď sa množstvo spotrebovanej energie pravidelne mení, napríklad v prípade rýpadiel, žeriavov, niektorých strojov atď .;
c) pulzujúce zaťaženie, keď sa množstvo spotrebovaného energie nepretržite mení, ako napríklad piestové čerpadlá, drviče čeľustí, obrazovky atď.
Výkon elektrického motora musí spĺňať tri podmienky:
a) normálne vykurovanie počas prevádzky; 
b) dostatočná kapacita preťaženia;
c) dostatočný rozbehový krútiaci moment.
Všetky elektromotory sú rozdelené do dvoch hlavných skupín:
a) pre dlhý režim prevádzky (bez obmedzenia trvania zaradenia);
b) pre prerušované použitie s časmi spínania 15, 25, 40 a 60%.
V prvej skupine, v katalógoch a pasoch, nepretržitá energia, ktorú môže elektrický motor vyvinúť neurčito, je pre druhú skupinu indikovaný výkon, ktorý môže elektrický motor vyvinúť, pracujúci s prerušeniami na neobmedzene dlhú dobu s určitým časovým oneskorením.
Vo všetkých prípadoch je správne zvolený takýto elektromotor, ktorý pri práci s bremenom, ale podľa plánu nastaveného pracovným strojom dosiahne plne povolené vykurovanie všetkých jeho častí. Voľba elektrických motorov s takzvaným "výkonovým rozpätím", založená na maximálnom možnom zaťažení podľa harmonogramu, vedie k nedostatočnému využitiu elektrického motora a následne ku zvýšeniu kapitálových nákladov a prevádzkových nákladov znížením výkonových faktorov a účinnosti.
Nadmerné zvýšenie výkonu motora môže v priebehu zrýchlenia viesť aj k trhlinám.
Ak má motor dlhú dobu pracovať s konštantným alebo mierne sa meniacim zaťažením, určenie jeho sily nie je ťažké a je vyrobené podľa vzorca, zvyčajne vrátane empirických koeficientov.
Oveľa ťažšie je výber výkonu elektrických motorov iných režimov prevádzky.
Krátkodobé zaťaženie je charakterizované skutočnosťou, že doby započítania sú krátke a prestávky sú dostatočné na úplné ochladenie elektrického motora. V tomto prípade sa predpokladá, že zaťaženie elektrického motora počas periódy zapnutia zostáva konštantné alebo takmer konštantné.
Aby mohol byť elektrický motor správne používaný na vykurovanie v tomto režime, je potrebné ho zvoliť tak, aby jeho nepretržitý výkon (uvedený v katalógoch) bol menší ako výkon zodpovedajúci krátkodobému zaťaženiu, to znamená, že elektrický motor má počas krátkodobej práce tepelné preťaženie.
Ak sú periódy prevádzky elektromotora podstatne nižšie ako čas potrebný na jeho úplné vykurovanie, ale prestávka medzi periódami zapnutia je výrazne kratšia ako doba úplného chladenia, nastane krátkodobé zaťaženie.
Prakticky by sa mal rozlišovať medzi dvoma typmi takejto práce:
a) zaťaženie v priebehu práce je konštantné v rozsahu a jeho graf je preto zobrazený ako obdĺžniky, ktoré sa striedajú s prestávkami;
b) zaťaženie počas pracovného obdobia sa mení podľa viac či menej komplikovaného zákona.
V oboch prípadoch môže byť problém výberu elektrického motora napájaním analyticky a graficky riešený. Obe tieto metódy sú pomerne komplikované, preto sa prakticky odporúča zjednodušená metóda ekvivalentných veličín, ktorá zahŕňa tri metódy:
a) priemerný štvorcový prúd;
b) priemerný štvorcový výkon;
c) stredný štvorcový moment.
Kontrola mechanickej preťažiteľnosti motora
Po výbere výkonu motora podľa podmienok vykurovania je potrebné skontrolovať mechanickú preťažiteľnosť motora, t.j. uistite sa, že maximálny zaťažovací moment podľa rozvrhu počas prevádzky a krútiaci moment pri štarte nepresiahne hodnoty maximálny moment podľa katalógu. 
Pri asynchrónnych a synchrónnych elektromotorech je hodnota prípustného mechanického preťaženia spôsobená ich sklopným elektromagnetickým momentom po dosiahnutí zastavenia týchto elektromotorov.
Množstvo maximálnych momentov vo vzťahu k nominálnej hodnote by malo byť 1,8 pre trojfázové asynchrónne elektromotory s prstencovými prstencami najmenej 1,65 pre tie isté skratované elektrické motory. Množstvo maximálneho krútiaceho momentu synchrónneho motora by tiež nemalo byť menšie ako 1,65 pri menovitých napätiach, kmitočtovom a budiacom prúde s výkonovým faktorom 0,9 (pri vodiacom prúde).
Takmer asynchrónne a synchrónne elektrické motory majú mechanickú preťažiteľnosť až do 2-2,5 a pre niektoré špeciálne elektromotory táto hodnota stúpa na 3-3,5.
Prípustné preťaženie elektrických motorov jednosmerného prúdu je určené pracovnými podmienkami a podľa GOST je od 2 do 4 dolná hranica platí pre elektromotory s paralelnou a hornú hranicu pre elektromotory so sériovým budením.
Ak výživu a distribučnej siete sú citlivé na zaťaženie, potom by sa mala vykonať kontrola mechanickej preťažiteľnosti s prihliadnutím na straty napätia v sieťach.
Pre asynchrónne skratované a synchrónne elektromotory musí byť násobok počiatočného momentu najmenej 0,9 (vzhľadom na nominálny).
Množstvo počiatočného momentu elektrických motorov s dvojitou veveričkou a hlbokou drážkou je oveľa vyššie a dosahuje 2-2,4.
Pri výbere výkonu elektrického motora treba mať na pamäti, že ohrev elektromotorov je ovplyvňovaný frekvenciou včlenení. Prípustná frekvencia inklúzií závisí od bežného sklzu, otočného momentu rotora a od pomeru počiatočného prúdu.
Asynchrónne motory bežných typov neumožňujú žiadne zaťaženie od 400 do 1000 a elektrické motory so zvýšeným sklzom - od 1100 do 2700 štartov za hodinu. Pri štartovaní zaťaženia sa výrazne zníži prípustný počet inklúzií.
Štartovací prúd elektromotora so skratovaným rotorom je veľký a táto okolnosť pri podmienkach častého štartu a najmä pri zvýšenej dobe zrýchlenia je dôležitá.
Na rozdiel od elektromotorov s fázovým rotorom, v ktorom sa časť tepla generovaného pri spúšťaní uvoľňuje v reostatu, t.j. mimo stroja, v skratovaných elektrických motoroch, všetko teplo sa uvoľňuje v samotnom stroji, čo spôsobuje jeho zvýšené zahriatie. Výber výkonu týchto elektromotorov sa preto musí robiť s ohľadom na vykurovanie pri mnohých štartoch.
Elektrický motor - Je to mechanizmus, ktorý slúži na premenu elektrickej energie na mechanickú. Princípom činnosti akéhokoľvek elektromotora je zákon elektromagnetickej indukcie. Elektrický motor sa zvyčajne skladá z pevnej časti (statora) a rotora (alebo kotvy), v ktorom sú vytvorené pevné alebo rotujúce magnetické polia. Elektromotory sú rôznych typov a modifikácií, sú široko používané v mnohých odvetviach ľudskej činnosti a predstavujú jednu z hlavných zložiek mechanizmov a pohonov na rôzne účely. Z charakteristík elektrického motora závisí priamo na efektívnosti výroby.
Hlavné časti, ktoré tvoria Elektromotory sú stator a rotor. Rotor je časť motora, ktorá sa otáča, a stator - ktorý zostáva stacionárny. Princíp fungovania elektrického motora je uzavretý v interakcii rotačného magnetického poľa vytvoreného statorovým vinutím a elektrického prúdu, ktorý je umiestnený v uzavretom vinutí rotora. Tento proces iniciuje otáčanie rotora v smere poľa.
Hlavné typy elektromotorov:
Ak hovoríme o takýchto elektromotoroch ako asynchrónne elektromotorypotom sa vzťahujú na druh motora striedavého prúdu. Takéto motory sú podobné jednofázové elektrické motory , a dvojfázové a trojfázové. V asynchrónnych motoroch sa frekvencia striedavého prúdu vo vinutí nezhoduje s frekvenciou otáčania rotora. Proces asynchrónneho motora je zabezpečený časovým rozdielom magnetických polí statora a rotora. Otáčanie rotora v dôsledku toho je oneskorené vzhľadom na pole statora. Predám elektromotor asynchrónny typ možné pre stroje, ktoré nevyžadujú špeciálne podmienky fungovania spúšťacieho mechanizmu.
Typy elektromotorov podľa stupňa ochrany pred vonkajším prostredím:
Elektrické motory s ochranou proti explózii majú trvalé bývanie, ktorá sa stane v prípade, že motory roztrhnutiu, bráni poraziť všetky ostatné časti mechanizmu a zabráni vzniku požiaru.
Chránené motory počas prevádzky sú uzavreté špeciálnymi ventilmi a sieťami, ktoré chránia mechanizmus pred prienikom cudzích predmetov. Používa sa v prostredí, kde nie je vysoká vlhkosť a nečistoty plynov, prachu, dymu a chemikálií.
Uzavreté elektrické motory mať špeciálnu škrupinu, ktorá nepreniká prachom, plynom, vlhkosťou a inými látkami a prvkami, ktoré môžu spôsobiť poškodenie mechanizmu motora. Takéto elektromotory sú hermetické a neplačené.
oblasť použitia frekvenčných meničov pomerne rozsiahle. Sú požadované v obrábacích strojoch a elektrických pohonoch priemyselných mechanizmov, dopravníkov, odsávacích ventilačných systémov atď. Princíp činnosti je pravidlo chastotnika výpočtu uhlovej rýchlosti hriadeľa, ktorý zahŕňa také faktory, ako je frekvencia siete. Tým, že sa mení frekvencia sily vinutia motora môže byť riadený otáčok motora v priamom pomere, čím sa zníži rýchlosť motora alebo zvýšenie ich. Tieto zariadenia sa tiež nazývajú "invertory", a to vďaka metóde, ktorou je riešená úloha súčasného riadenia frekvencie a napätia na výstupe konvertora. Všetky frekvenčné meniče sú nevyhnutne označené značkami, ktoré sú označené ich charakteristikami:
Väčšina priemyselných frekvenčných meničov je určená na prácu trojfázové siete AC, ale existujú aj iné modely, ako napríklad chastotniki pre jednofázové motory.
Život modernej osoby je ťažké si predstaviť bez takého mechanizmu ako elektrický motor. Pozrite sa okolo - získali takmer univerzálnu distribúciu. Dnes sa používajú nielen vo všetkých odvetviach priemyslu, ale aj v doprave, objektoch a zariadeniach, ktoré obklopujú každodenný život, v práci a doma. Sušičky vlasov, ventilátory, šijacie stroje, stavebné náradie - nie je kompletný zoznam zariadení, ktoré používajú elektrické motory.
Obzvlášť bezpečné odlišujú práve motory, takže sú široko používané v jednotkách spracovania kovu, drevoobrábacích strojov a iných priemyselných zariadení, v kovacích lisov, zdvíhacích strojov, výťahy, tkanie, šitie, stroje, priemyselné ventilátory, kompresory, čerpadlá, odstredivky, miešačky na betón , Elektrické motory žeriava sa používajú v kapitálových, priemyselných a občianskych stavbách, v baníctve, hutníckom priemysle, energetike, doprave.
Metro, električka, trolejbus - všetky tieto druhy dopravy majú svoju existenciu elektrickému motoru. Každá kancelária alebo obytná budova dnes nemožno predstaviť bez klimatizácie alebo systému čistenia vzduchu - používajú tiež elektrické motory. Prevádzka väčšiny moderných zariadení nie je možná bez elektrického motora, a preto závisí od kvality a spoľahlivosti tohto mechanizmu. Jeho zlomenie môže viesť k veľmi smutným výsledkom až po zastavenie výroby a obrovským finančným stratám. Preto je možné získať elektrické motory iba od spoľahlivého a dôveryhodného dodávateľa, ktorý zaručuje kvalitu výrobku.
Princíp motora je vplyv magnetizmu, ktorý vám umožňuje účinne premeniť elektrickej energie v mechanickom. Princíp premeny energie v rôznych typoch elektrických motorov rovnaký pre všetky typy elektrických motorov, ale konštrukcia motorov a metód pre rýchlosť riadenie momentu sa môže líšiť. Všetci sú známi zo školy najjednoduchší príklad elektrický motor - keď sa rám otáča medzi pólmi permanentného magnetu. Samozrejme, zariadenie elektromotora, ktoré sa používa v priemyselných strojoch alebo domácich spotrebičoch, je oveľa komplikovanejšie. Pozrime sa, ako funguje asynchrónny elektromotor, ktorý je najrozšírenejší v priemysle.
Princíp činnosti asynchrónneho motora.
Princíp činnosti indukčný motor, rovnako ako ostatné, je založená na použití rotujúceho magnetického poľa. Rýchlosť otáčania magnetického poľa sa zvyčajne nazýva synchrónne, pretože zodpovedá rýchlosti otáčania magnetu. Rýchlosť otáčania valca sa nazýva asynchrónna, to znamená, že sa nezhoduje s rýchlosťou otáčania magnetu. Rýchlosť otáčania valca (rotora) sa odlišuje od synchrónnej rýchlosti otáčania magnetického poľa malým množstvom, ktoré sa nazýva posuv. Vynútiť silu elektrického prúdu vytvoriť rotujúce magnetické pole a použiť ho na rotáciu rotora sa zvyčajne používa trojfázový prúd.
Na póloch železného jadra prstencového tvaru, nazývaného stator elektrického motora, sú tri vinutia, siete trojfázový prúd vzájomne voči sebe v uhle 120 °. Vnútri jadra je upevnený na osi kovového valca, ktorý sa nazýva rotor elektrického motora. Ak sú vinutia prepojené a pripojené k trojfázovej prúdovej sieti, celkový magnetický tok vytvorený tromi pólami sa bude otáčať. Celkový magnetický tok súčasne zmení svoj smer zmenou smeru prúdu v statorových vinutiach (póloch). V tomto prípade, v jednom období zmeny prúdu vo vinutí, bude magnetický tok robiť úplnú otáčku. Rotačný magnetický tok odnesie valček a dostaneme tak asynchrónny elektromotor.
Statorové vinutia môžu byť spojené "hviezdou", ale otáčavé magnetické pole je tiež vytvorené, keď sú spojené "trojuholníkom". Ak vymeníte vinutia druhej a tretej fázy, magnetický tok zmení smer otáčania na opačnú stranu. Rovnaký výsledok môže byť dosiahnutý bez zmeny umiestnenia statorového vinutia, druhé siete a riadenie fázového prúdu v statore tretej fáze siete tretej fázy - v druhej fáze statora. Preto je možné zmeniť smer otáčania magnetického poľa prepnutím akýchkoľvek dvoch fáz.
Stator moderného asynchrónneho elektromotora má nevyložené póly, to znamená, že vnútorný povrch statora je úplne hladký. Na zníženie strát vírivého prúdu je statorové jadro zostavené z tenkých lisovaných oceľových plechov. Zostavené jadro statora je upevnené v oceľovom puzdre. V drážkach statora ležal vinutie medeného drôtu. Fáza vinutia statora motora sú pripojené k "hviezda" alebo "trojuholníka", na ktorej sú zobrazené všetky začiatky a konce vinutia na budovu - špeciálne izolačné dosky. Takéto zariadenie statora je veľmi výhodné, pretože umožňuje otáčanie jeho vinutia na rôzne štandardné napätia.
Rotor asynchrónneho motora, ako stator, je zložený z lisovaných oceľových plechov. Vinutie je umiestnené v drážkach rotora. V závislosti od konštrukcie rotora sú asynchrónne elektromotory rozdelené na motory s rotor s klietkou vo veveričke a fázový rotor, Navíjanie rotoru vo veveričke je vyrobené z medených tyčí vložených do drážok rotora. Konce tyčí sú spojené medeným krúžkom. Toto navíjanie sa nazýva vinutie v klietke vo veveričke. Upozorňujeme, že medené tyče v drážkach nie sú izolované.
Podmienky pre výber elektrického motora
Výber jedného z katalógových typov elektromotorov sa považuje za správny za nasledujúcich podmienok:
a) najkompletnejšia zhoda pracovného stroja (pohonu) s elektromotorom na mechanických vlastnostiach. To znamená, že elektromotor musí mať takú mechanickú charakteristiku, pri ktorej by mohol informovať pohon o potrebných hodnotách rýchlosti a zrýchlenia, a to počas prevádzky aj počas štartu;
b) maximálne využitie výkonu motora v procese. Teplota všetkých aktívnych častí elektromotora v najťažších prevádzkových režimoch by mala byť čo najbližšie k teplote vykurovania stanovenej normami, ale nesmie byť vyššia ako teplota;
c) zhoda elektrického motora s pohonom a environmentálne podmienky pre konštrukciu;
d) súlad motora s parametrami jeho napájacej siete.
Pri výbere elektrického motora sú potrebné nasledujúce počiatočné údaje:
a) názov a typ mechanizmu;
b) maximálny výkon na hnacom hriadeli mechanizmu, ak je režim prevádzky kontinuálny a zaťaženie je konštantné a v iných prípadoch - grafy zmeny výkonu alebo momentu odporu ako funkcia času;
c) rýchlosť otáčania hnacieho hriadeľa mechanizmu;
d) spôsob združenia mechanizmu s hriadeľom motora (v prítomnosti prevodových stupňov je uvedený typ prevodového stupňa a prevodový pomer);
e) množstvo krútiaceho momentu pri štartovaní, ktoré by elektromotor mal poskytovať na hnacom hriadeli mechanizmu;
e) limity regulácie rýchlosti poháňaného mechanizmu s uvedením hornej a dolnej hodnoty rýchlostí a zodpovedajúcich hodnôt výkonu a krútiaceho momentu;
g) povahu a kvalitu (plynulosť, nadmorskú výšku) požadovanej regulácie rýchlosti;
h) frekvenciu štartu alebo štartu pohonu v priebehu jednej hodiny; a) environmentálne charakteristiky.
Voľba elektrického motora založená na zohľadnení všetkých podmienok sa vykonáva podľa katalógových údajov.
V prípade mechanizmov širokého použitia je výber elektrického motora výrazne zjednodušený údajmi obsiahnutými v príslušných informáciách výrobcov a zmiernil sa s uvedením typu elektromotora vzhľadom na sieťové parametre a charakter prostredia.
Výber výkonu motora
Výber výkonu motora by mal byť v súlade s povahou zaťaženia pracovného stroja. Tento znak sa hodnotí z dvoch dôvodov:
a) podľa nominálneho režimu prevádzky;
b) zmeny spotreby energie.
Existujú nasledujúce režimy činnosti:
a) dlhé (dlhé), keď je pracovná doba tak dlhá, že vykurovanie elektromotora dosiahne svoju hodnotu v ustálenom stave (napríklad v čerpadlách, pásových dopravníkoch, ventilátoroch atď.);
b) krátkodobo, ak doba trvania pracovnej doby nie je dostatočná na dosiahnutie teploty vykurovania elektromotorom zodpovedajúcim tomuto zaťaženiu a stopovacie doby naopak postačujú na ochladenie elektromotora na teplotu okolia. V tomto režime môžu elektromotory prevádzkovať rôzne mechanizmy;
c) prerušovane - s relatívnou dobou aktivácie 15, 25, 40 a 60% s trvaním jedného cyklu najviac 10 minút (napríklad pri žeriavoch, niektorých strojoch, generátoroch motorov na zváranie jedným operátorom atď.).
Podľa zmien spotreby energie sa líšia tieto prípady:
a) konštantné zaťaženie, keď je množstvo spotrebovanej energie počas prevádzky konštantné alebo má malé odchýlky od priemernej hodnoty, ako napríklad odstredivé čerpadlá, ventilátory, kompresory s konštantným prietokom atď.
b) variabilné zaťaženie, keď sa periodicky mení množstvo spotrebovaného energie, napríklad v prípade rýpadiel, žeriavov, niektorých strojov atď .;
c) pulzujúce zaťaženie, keď sa množstvo spotrebovaného energie nepretržite mení, ako napríklad piestové čerpadlá, drviče čeľustí, obrazovky atď.
Výkon elektrického motora musí spĺňať tri podmienky:
a) normálne vykurovanie počas prevádzky;
b) dostatočná kapacita preťaženia;
c) dostatočný rozbehový krútiaci moment.
Všetky elektromotory sú rozdelené do dvoch hlavných skupín:
a) pre dlhý režim prevádzky (bez obmedzenia trvania zaradenia);
b) pre prerušované použitie s časmi spínania 15, 25, 40 a 60%.
V prvej skupine, v katalógoch a pasoch, nepretržitá energia, ktorú môže elektrický motor vyvinúť neurčito, je pre druhú skupinu indikovaný výkon, ktorý môže elektrický motor vyvinúť, pracujúci s prerušeniami na neobmedzene dlhú dobu s určitým časovým oneskorením.
Vo všetkých prípadoch je správne zvolený takýto elektromotor, ktorý pri práci s bremenom, ale podľa plánu nastaveného pracovným strojom dosiahne plne povolené vykurovanie všetkých jeho častí. Voľba elektrických motorov s takzvaným "výkonovým rozpätím", založená na maximálnom možnom zaťažení podľa harmonogramu, vedie k nedostatočnému využitiu elektrického motora a následne ku zvýšeniu kapitálových nákladov a prevádzkových nákladov znížením výkonových faktorov a účinnosti.
Nadmerné zvýšenie výkonu motora môže v priebehu zrýchlenia viesť aj k trhlinám.
Ak má motor dlhú dobu pracovať s konštantným alebo mierne sa meniacim zaťažením, určenie jeho sily nie je ťažké a je vyrobené podľa vzorca, zvyčajne vrátane empirických koeficientov.
Oveľa ťažšie je výber výkonu elektrických motorov iných režimov prevádzky.
Krátkodobé zaťaženie je charakterizované skutočnosťou, že doby započítania sú krátke a prestávky sú dostatočné na úplné ochladenie elektrického motora. V tomto prípade sa predpokladá, že zaťaženie elektrického motora počas periódy zapnutia zostáva konštantné alebo takmer konštantné.
Aby mohol byť elektrický motor správne používaný na vykurovanie v tomto režime, je potrebné ho zvoliť tak, aby jeho nepretržitý výkon (uvedený v katalógoch) bol menší ako výkon zodpovedajúci krátkodobému zaťaženiu, to znamená, že elektrický motor má počas krátkodobej práce tepelné preťaženie.
Ak sú periódy prevádzky elektromotora podstatne nižšie ako čas potrebný na jeho úplné vykurovanie, ale prestávka medzi periódami zapnutia je výrazne kratšia ako doba úplného chladenia, nastane krátkodobé zaťaženie.
Prakticky by sa mal rozlišovať medzi dvoma typmi takejto práce:
a) zaťaženie v priebehu práce je konštantné v rozsahu a jeho graf je preto zobrazený ako obdĺžniky, ktoré sa striedajú s prestávkami;
b) zaťaženie počas pracovného obdobia sa mení podľa viac či menej komplikovaného zákona.
V oboch prípadoch môže byť problém výberu elektrického motora napájaním analyticky a graficky riešený. Obe tieto metódy sú pomerne komplikované, preto sa prakticky odporúča zjednodušená metóda ekvivalentných veličín, ktorá zahŕňa tri metódy:
a) priemerný štvorcový prúd;
b) priemerný štvorcový výkon;
c) stredný štvorcový moment.
Kontrola mechanickej preťažiteľnosti motora
Po zvolení výkon motora vykurovacích podmienkach je potrebné skontrolovať mechanické schopnosti preťaženie motora, tj. E. Ak chcete zabezpečiť, že maximálny krútiaci moment zaťaženie na pláne na prácu a dobe rozbehu neprekročí maximálny moment v katalógu.
Pri asynchrónnych a synchrónnych elektromotorech je hodnota prípustného mechanického preťaženia spôsobená ich sklopným elektromagnetickým momentom po dosiahnutí zastavenia týchto elektromotorov.
Množstvo maximálnych momentov vo vzťahu k nominálnej hodnote by malo byť 1,8 pre trojfázové asynchrónne elektromotory s prstencovými prstencami najmenej 1,65 pre tie isté skratované elektrické motory. Množstvo maximálneho krútiaceho momentu synchrónneho motora by tiež nemalo byť menšie ako 1,65 pri menovitých napätiach, kmitočtovom a budiacom prúde s výkonovým faktorom 0,9 (pri vodiacom prúde).
Takmer asynchrónne a synchrónne elektrické motory majú mechanickú preťažiteľnosť až do 2-2,5 a pre niektoré špeciálne elektromotory táto hodnota stúpa na 3-3,5.
Prípustné preťaženie elektrických motorov jednosmerného prúdu je určené pracovnými podmienkami a podľa GOST je od 2 do 4 dolná hranica platí pre elektromotory s paralelnou a hornú hranicu pre elektromotory so sériovým budením.
Ak sú dodávateľské a distribučné siete citlivé na zaťaženie, potom by sa mala kontrolovať mechanická kapacita preťaženia s prihliadnutím na napäťové straty v sieťach.
Pre asynchrónne skratované a synchrónne elektromotory musí byť násobok počiatočného momentu najmenej 0,9 (vzhľadom na nominálny).
Množstvo počiatočného momentu elektrických motorov s dvojitou veveričkou a hlbokou drážkou je oveľa vyššie a dosahuje 2-2,4.
Pri výbere výkonu elektrického motora treba mať na pamäti, že ohrev elektromotorov je ovplyvňovaný frekvenciou včlenení. Prípustná frekvencia inklúzií závisí od bežného sklzu, otočného momentu rotora a od pomeru počiatočného prúdu.
Asynchrónne motory bežných typov neumožňujú žiadne zaťaženie od 400 do 1000 a elektrické motory so zvýšeným sklzom - od 1100 do 2700 štartov za hodinu. Pri štartovaní zaťaženia sa výrazne zníži prípustný počet inklúzií.
Štartovací prúd elektromotora so skratovaným rotorom je veľký a táto okolnosť pri podmienkach častého štartu a najmä pri zvýšenej dobe zrýchlenia je dôležitá.
Na rozdiel od elektromotorov s fázovým rotorom, v ktorom sa časť tepla generovaného pri spúšťaní uvoľňuje v reostatu, t.j. mimo stroja, v skratovaných elektrických motoroch, všetko teplo sa uvoľňuje v samotnom stroji, čo spôsobuje jeho zvýšené zahriatie. Výber výkonu týchto elektromotorov sa preto musí robiť s ohľadom na vykurovanie pri mnohých štartoch.