Maszyna asynchroniczna jest maszyną elektryczną. prąd przemiennyktórego prędkość wirnika nie jest równa (w trybie napędu) do częstotliwości obrotu pola magnetycznego wytwarzanego przez prąd uzwojenia stojana.
W wielu krajach maszyny zbierające są również w rankingu maszyn asynchronicznych. Druga nazwa maszyn indukcyjnych jest indukcyjna, ponieważ prąd w uzwojeniu wirnika jest indukowany przez wirujące pole stojana. Obecnie maszyny asynchroniczne stanowią większość samochodów elektrycznych. Używane są głównie jako silniki elektryczne i są głównymi przetwornikami energii elektrycznej w energię mechaniczną.
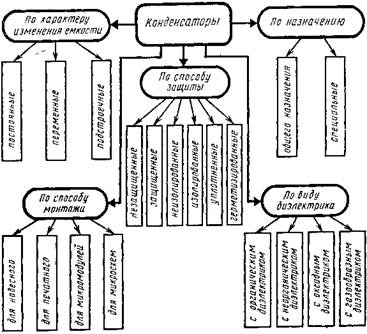
Silnik asynchroniczny z wirnikiem o wysokiej rezystancji. Silnik asynchroniczny z wirnikiem uzwojenia. Silnik z podwójną białą klatką. Połączenie gwiazda-trójkąt.
Zalety: Łatwy w produkcji, brak mechanicznego kontaktu ze statyczną częścią maszyny.
Wady: mały moment rozruchowy, znaczny prąd rozruchowy.
Maszyna asynchroniczna ma stojan i wirnik, oddzielone szczeliną powietrzną. Jego aktywnymi częściami są uzwojenia i rdzeń magnetyczny (rdzeń); wszystkie pozostałe części są strukturalne, zapewniając niezbędną wytrzymałość, sztywność, chłodzenie, możliwość obrotu itp.
Generowanie wirującego pola. Pole magnetyczne silnika asynchronicznego jest również polem wirującym. W przypadku silnik trójfazowy generowane przez trzy prądy spoza fazy, które krążą w uzwojeniu stojana. Dla wygenerowanego pola wirującego, uzwojenia powinny być równomiernie rozmieszczone na obwodzie stojana, tak jak w przypadku prądów trójfazowych. Dlatego w aparatach bipolarnych kąt pomiędzy odpowiednimi cewkami każdej fazy powinien wynosić 120 °. Prądy statora umieszczają 3 następnie na 3 zmiennych polach, również 120 ° poza fazą, powodując obracanie się pola magnetycznego.
Uzwojenie stojana jest uzwojeniem trójfazowym (w ogólności - wielofazowym), którego przewody są równomiernie rozmieszczone wokół obwodu stojana i układane w postaci faz w rowkach o kątowej odległości 120 stopni. Fazy uzwojenia stojana są połączone zgodnie ze standardowym schematem "trójkąt" lub "gwiazda" i połączone z siecią prądu trójfazowego. Magnetyzer stojana zostaje poddany ultemagnetyzacji w procesie zmiany prądu w uzwojeniu stojana, więc jest rekrutowany z elektrycznych płyt stalowych, aby zapewnić minimalne straty magnetyczne. Głównym sposobem montażu obwodu magnetycznego w pakiecie jest mieszanie.
Kierunek tego pola w danej chwili może być reprezentowany przez strzałkę. Poczucie prądów i kierunek wirującego pola w bipolarnej maszynie, która dla uproszczenia została założona jako wyposażona tylko w 6 gniazd. Czas odpowiadający każdej pozycji można wywnioskować z kąta obróconego przez pole. Przełączanie dwóch terminali sieciowych odwraca kierunek obrotu pola. Następnie wirnik porusza się w kierunku przeciwnym do ruchu wskazówek zegara.
Składa się z korpusu, w którym zamontowana jest korona ze specjalnych blach stalowych, wyposażona w szczeliny. Uzwojenia są rozmieszczone w tych szczelinach i tworzą zestaw uzwojeń zawierających tyle obwodów, ile jest faz sieci zasilającej. Praca wirnika. On jest ruchomą częścią silnika. Znajduje się wewnątrz stojana i składa się z połączenia stalowych arkuszy, które tworzą cylinder osadzony w wale silnika.
Zgodnie z projektem wirnika maszyny asynchroniczne dzielą się na dwa główne typy: z wirnikiem klatkowym i wirnikiem fazowym. Oba typy mają taką samą konstrukcję stojana i różnią się tylko wydajnością uzwojenia wirnika. Rdzeń magnetyczny wirnika jest podobny do obwodu magnetycznego stojana - od elektrycznych płyt stalowych.
Zasada działania
Wirnik silnika trójfazowego przechodzi przez wirujące pole wytwarzane w stojanie. Uzwojenie wirnika może być wykonane jako stojan w postaci rozproszonej, z cewkami połączonymi szeregowo; lub także w oparciu o paski. Te pręty z odlewanego ciśnieniowo aluminium są połączone równolegle i jednocześnie zwierane dwoma pierścieniami końcowymi. Pierścienie te często łączą się ze stopem aluminium, który wypełnia rowki wirnika.
W obu przypadkach uzwojenie wirnika zamyka się, gdy silnik jest uruchomiony. Połączone działanie pola wirującego i pola ze względu na prąd wirnika określa, podobnie jak we wszystkich silnikach, moment obrotowy. Moment ten pociąga wirnik w kierunku obrotu wirującego pola i przekazuje prędkość bardzo zbliżoną do synchronizmu. Zarówno w stanie spoczynku, jak iw początkowym okresie rozruchu, silnik trójfazowy działa w taki sam sposób jak zwykły transformator i wytwarza resztkowe napięcie wirnika w wirniku, którego wartość zależy również od stosunku liczby obrotów.
Napięcie jest doprowadzane do uzwojenia stojana, pod działaniem którego prąd przepływa przez te uzwojenia i wytwarza wirujące pole magnetyczne. Pole magnetyczne działa na uzwojenie wirnika i zgodnie z prawem indukcji elektromagnetycznej indukuje w nich emf. W uzwojeniu wirnika pod działaniem indukowanego pola elektromagnetycznego powstaje prąd. Prąd w uzwojeniu wirnika wytwarza własne pole magnetyczne, które oddziałuje z wirującym polem magnetycznym stojana. W rezultacie siła działa na każdy ząb magnetycznego obwodu wirnika, który, składając się wzdłuż koła, wytwarza obrotowy moment elektromagnetyczny, który powoduje obrót wirnika.
W silnikach z wirującym uzwojeniem to napięcie może być mierzone w pierścieniach ślizgowych. Jego wartość jest zwykle podana na tabliczce znamionowej. Kiedy silnik pracuje, skuteczne napięcie wirnika jest więc równe tylko różnicy między dwoma poprzednimi.
Jeżeli wirnik musi się obracać z prędkością synchroniczną, jest oczywiste, że oba napięcia będą równe, tak że efektywne napięcie wirnika będzie zerowe. W takim przypadku prąd nie przepływa przez wirnik, a moment obrotowy zniknie. Dlatego silnik trójfazowy zawsze pozostaje w tyle za szybkością synchronizmu: jak mówią, ześlizguje się. Różnica między ostatnią a rzeczywistą prędkością silnika jest względną prędkością silnika względem pola. Otrzymuje on nazwę poślizgu danego szczegółu, aby podzielić względną prędkość na synchroniczność; zazwyczaj wyrażone w procentach.
Najczęściej spotykany wśród silników elektrycznych Dostaje trójfazowy silnik asynchroniczny, po raz pierwszy zaprojektowany przez słynnego rosyjskiego elektryka M. O. Dolivo-Dobrovolsky.
Silnik asynchroniczny wyróżnia się prostotą i prostą konserwacją. Podobnie jak w przypadku każdej maszyny prądu przemiennego, silnik asynchroniczny składa się z dwóch głównych części; stojan i wirnik. Stojan jest nieruchomą częścią maszyny, wirnik jest jego częścią obrotową. Maszyna asynchroniczna ma właściwość odwracalności, tzn. Może być używana zarówno w trybie generatora, jak iw trybie silnika. Ze względu na szereg istotnych wad, generatory asynchroniczne prawie nigdy nie są używane, natomiast silniki asynchroniczne, jak zauważono powyżej, są bardzo rozpowszechnione.
Dlatego silnik trójfazowy jest zasadniczo asynchroniczny. Wraz ze wzrostem obciążenia, a wraz z nim prąd wirnika, liczba obrotów maleje. Napęd na cztery koła konwencjonalnych silników trójfazowych wynosi około 5% dla małej mocy i 2-3% dla starszych silników. Charakterystyka pracy silnika trójfazowego jest podobna do charakterystyki silnika bocznikowego z ciągłym prądem. Dzięki interkalującemu oporowi w obwodzie wirnika, można uzyskać bardziej wyraźną charakterystykę redukcji dla celów sterowania prędkością, ale wtedy zmniejsza się większe straty i wydajność silnika.
Dlatego rozważymy działanie maszyny asynchronicznej w trybie silnika, czyli proces przekształcania energii elektrycznej w energię mechaniczną.
Wielofazowe uzwojenie prądu zmiennego wytwarza wirujące pole magnetyczne, którego prędkość obrotowa na minutę
Jeśli wirnik obraca się z prędkością n2 równą prędkości obrotu pola magnetycznego (n2 = n1), wówczas ta prędkość jest nazywana synchroniczną.
Przy prędkości wirującego pola magnetycznego nazywa się szybkość synchronizacji i jest. Gdy linie pola magnetycznego obcinają pręty wirnika, tworzą siła elektromotoryczna, co prowadzi do występowania prądów, które krążą w przeciwnych kierunkach, tj. prądy te wytwarzane są w oddzielnych wątkach przy 180º. Przewody te są narażone na siły, które mają tendencję do przemieszczania ich w kierunku prostopadłym pole magnetyczne, a tym samym stworzyć tak zwany moment obrotowy.
Określana jest wartość momentu obrotowego silnika. K = Strumień magnetyczny wirującego pola. Prędkość wirnika powinna być mniejsza niż prędkość strumienia magnetycznego, ponieważ gdyby miały taką samą prędkość, pręty wirnika nie byłyby odcięte od linii przepływu, a zatem nie generowałaby się emisja, prąd w wirniku byłby zerowy.
Jeśli wirnik obraca się z prędkością inną niż prędkość obrotu pola magnetycznego (n2n1), wówczas prędkość ta jest nazywana asynchroniczną.
W silniku asynchronicznym proces roboczy może przebiegać tylko z prędkością asynchroniczną, tj. Przy prędkości obrotowej wirnika nie równej prędkości obrotowej pola magnetycznego.
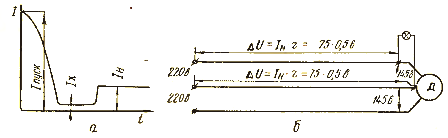
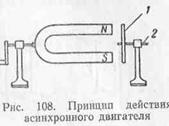
Prędkość wirnika może różnić się bardzo niewiele od prędkości Julii, ale kiedy silnik pracuje, zawsze będzie mniej (n2 Ze względu na opór powietrza i tarcie wirnik nie osiąga prędkości równej prędkości przepływu. Ta różnica nazywa się poślizgiem. Mamy, że intensywność w wirniku zostanie określona następującym wyrażeniem. Jeśli zastąpimy równania 1 i 1 w równaniu 2, otrzymamy moment obrotowy silnika w zależności od poślizgu. Intensywność i moment obrotowy są wprost proporcjonalne do poślizgu zarówno pod próżnią, jak i pod pełnym obciążeniem. Rysunek 13 pokazuje związek między zmianą momentu obrotowego a prądem wirnika z prędkością asynchronicznego silnika ze zwartym wirnikiem i niską impedancją. Widzimy, że w spoczynku silnik pochłania około sześć i pół razy prąd przy pełnym obciążeniu, a moment obrotowy jest półtora razy większy od momentu przy pełnym obciążeniu. Działanie silnika asynchronicznego opiera się na zjawisku, nazwie dysku Arago-Lenz (ryc. 108). Zjawisko to polega na tym, że: jeżeli przed biegunami magnesu trwałego umieścimy miedzianą tarczę 1, która swobodnie siedzi na osi 2 i zacznie obracać magnes wokół swojej osi za pomocą rączki, wówczas miedziana tarcza obróci się w tym samym kierunku. Dzieje się tak dlatego, że kiedy magnes się obraca, linie magnetyczne jego pola, zamykając się od bieguna północnego biegunem południowym, przenikają przez dysk i indukują w nim prądy wirowe, 3 w wyniku oddziaływania prądów wirowych z polem magnetycznym magnesu, powstaje siła, która powoduje obrót dysku. Na podstawie prawa Lenza kierunek każdego indukowanego prądu jest taki, że przeciwdziała powodowi, który go spowodował. Dlatego prądy wirowe w korpusie dysku mają tendencję do opóźniania obrotu magnesu, ale, nie będąc w stanie tego zrobić, powodują obracanie się dysku tak, że podąża on za magnesem. Prędkość obrotu dysku jest zawsze mniejsza niż prędkość obrotowa magnesu. Gdyby z jakiegoś powodu prędkości te stały się takie same, to lichi magnetyczne nie przekroczyłyby dysku, a zatem nie byłoby w nim prądów wirowych, tj. Nie byłoby siły, przy której dysk się obraca. Jeśli rezystancja wirnika zostanie zwiększona do trzech razy, moment rozruchowy można podwoić, praktycznie zmniejszając prąd o 25%. W tym przypadku wirnik jest uważany za o wysokiej wytrzymałości. Zapewnia to dobrą charakterystykę rozruchową silnika, dlatego jego głównym zastosowaniem są aplikacje związane z kolejnymi uruchomieniami i przystankami. Jeśli konieczne jest połączenie dobrego momentu rozruchowego silnika z wirnikiem o wysokiej wytrzymałości z silnikiem o wysokiej wydajności z wirnikiem o niskiej rezystancji, konieczna jest zmiana oporu wirnika. Osiąga się to za pomocą trójfazowego uzwojenia w wirniku zamiast białej celi. W silnikach asynchronicznych magnes stały zastępowany jest przez wirujące pole magnetyczne wytwarzane przez trójfazowe uzwojenie stojana, gdy jest ono włączane w sieci prądu przemiennego. Obrotowe pole magnetyczne stojana przecina się z przewodnikami uzwojenia wirnika i indukuje je w nich. c. Jeśli uzwojenie wirnika jest zamknięte dla dowolnego oporu lub krótkiego, to przez to Podczas rozruchu cały opór jest w obwodzie, stopniowo tłumiony do zera, gdy silnik otrzymuje prędkość. Ponieważ silnik klatkowy ma stałą prędkość, jeśli chcesz zmienić prędkość, musisz użyć tego silnika, który pozwala na użycie szerokiego zakresu prędkości od zera do około 95%. Inną procedurą, która pozwala na wzrost i wzrost wzrostu wirnika o niskim wirniku, jest silnik wirnika nawinięty na podwójną klatkę z wiewiórką. Duże pręty są umieszczone wewnątrz wirnika, jego reaktancja jest bardzo wysoka na częstotliwości sieci i krąży bardzo niewiele do zatrzymanego wirnika. pod wpływem indukowalnego e. d. przepływy prądu. W rezultacie pole uzwojenia stojana wytwarza moment obrotowy, pod działaniem którego rotor zaczyna się obracać. Na przykład wybierz część obwodu wirnika, na którym znajduje się jeden przewodnik jego uzwojenia. Pole stojana jest reprezentowane przez biegun północny N, który obraca się w przestrzeni i wokół wirnika w kierunku zgodnym z ruchem wskazówek zegara z liczbą obrotów N na minutę. W konsekwencji biegun N przesuwa się względem przewodu uzwojenia wirnika od lewej do prawej, w wyniku czego indukowany jest w nim przewodnik. c, który zgodnie z zasadą prawej ręki, jest skierowany do widza (znak "kropka") Jeśli uzwojenie wirnika jest zamknięte, to pod działaniem e. d. prąd przepływa przez to uzwojenie, które jest również kierowane do widza w naszym wybranym przewodniku. Wręcz przeciwnie, cienkie pręty powierzchni wirnika mają małe reaktywne opory, ale wysokie opory. Dlatego tylko pręty wirnika o wysokiej wytrzymałości, które działają jak wirnik o wysokiej wytrzymałości, są transportowane tylko podczas rozruchu. Odwrotnie, kiedy silnik osiąga prędkość, reaktancja w grubych prętach zmniejsza się, gdy całkowity prąd wirnika wzrasta, aż prędkość stanie się prawie równa prądowi płynącemu przez cienkie pręty, podczas gdy opór jest mały w czasie działania. W wyniku oddziaływania prądu w przewodzie uzwojenia wirnika z polem magnetycznym powstaje siła, która przesuwa przewodnik w kierunku określonym przez regułę lewej ręki, tj. Od lewej do prawej. Wraz z przewodnikiem zaczyna się poruszać i wirnikiem. Jeżeli siła F działająca na przewodzie uzwojenia wirnika jest pomnożona przez odległość tego przewodnika od osi wirnika (ramię podające siłę), wówczas uzyskujemy moment wytworzony przez prąd tego przewodnika. Ponieważ na wirniku umieszczona jest duża liczba przewodów, suma iloczynu sił działających na każdy z przewodów wyznacza moment obrotowy wytwarzany przez silnik w odległościach tych przewodów od osi wirnika. Pod wpływem momentu obrotowego rotor wchodzi w ruch obrotowy w kierunku obrotu pola magnetycznego. Dlatego, aby odwrócić silnik, to znaczy zmienić kierunek obrotu wirnika, konieczna jest zmiana kierunku obrotu pola magnetycznego wytworzonego przez uzwojenie stojana. Osiąga się to poprzez zmianę rotacji faz uzwojeń stojana; w tym celu dowolne dwa z trzech przewodów łączących uzwojenie stojana z siecią powinny być wymieniane względem terminali sieci. Silniki rewersyjne wyposażone są w przełączniki, za pomocą których możliwa jest zmiana rotacji fazowej uzwojeń stojana, a tym samym kierunek obrotu wirnika. Biorąc pod uwagę, że moc wyjściowa stojana jest równa mocy wejściowej w wirniku, musimy. Zużycie energii = pochłonięta moc - strata. Jeśli pomnożysz licznik i mianownik przez poprzednie zmniejszenie o liczbę otrzymanych faz. Załączona figura przedstawia osiągi silnika ruchu indukcyjnego, w którym jest obserwowany, gdy współczynnik mocy wzrasta wraz z obciążeniem silnika. Uruchom silnik trójfazowy. Jeśli silnik trójfazowy jest podłączony bezpośrednio do sieci, bez żadnego oporu wprowadzonego do obwodu wirnika, zaczyna się prąd rozruchowy, który jest prawie zwarty. W konwencjonalnych silnikach z ramą wirnika jest 5-8 razy większy od prądu znamionowego. Poprzez wprowadzenie rezystancji do uzwojenia wirnika prąd rozruchowy można zredukować do pożądanej wartości. Osiąga się to w silnikach z wirnikiem nawijającym, z pierścieniami kontaktowymi stykającymi się z rozrusznikiem. Pomimo wysokiego prądu rozruchowego pochłanianego przez normalny wirnik separatora, początkowy moment obrotowy generowany przez klatkę jest bardzo niski, ponieważ w tym momencie współczynnik mocy wirnika jest również bardzo mały. Bez względu na kierunek obrotu wirnika jego prędkość n2, jak już wskazano, jest zawsze mniejsza niż prędkość pola magnetycznego stojana. Jeśli założymy, że w pewnym momencie prędkość wirnika była równa liczbie obrotów pola stojana, wówczas przewody uzwojenia wirnika nie będą przecinały linii magnetycznych pola stojana i nie będzie prądu w wirniku. W tym przypadku moment obrotowy będzie równy zeru, prędkość wirnika będzie się zmniejszać w porównaniu do prędkości pola stojanu, aż do momentu osiągnięcia momentu obrotowego, równoważąc moment hamowania, który składa się z momentu obrotowego; obciążenie na wale i moment tarcia w samochodzie. Podczas zwijania wirników, początkowy współczynnik mocy można znacznie poprawić dzięki rozrusznikowi, uzyskując w ten sposób wyższy moment rozruchowy. Gdy prąd rozruchowy nie powinien przekraczać wartości umiarkowanej, silniki wirnika separatora są uruchamiane za pomocą połączenia gwiazda-trójkąt. W tym celu konieczne jest, aby uzwojenie stojana zostało zaprojektowane tak, aby zwykłe połączenie serwisowe było połączeniem w trójkącie. Jeśli, na przykład, założymy, że w tym ostatnim przypadku prąd rozruchowy jest 6 razy większy od wartości nominalnej, to połączenie gwiazdowe zmniejsza ten współczynnik do. Należy jednak pamiętać, że początkowy moment obrotowy również zmniejsza się w tej samej proporcji. Dlatego możliwe jest uruchomienie tylko w próżni lub przy średnim obciążeniu, co w większości przypadków jest wystarczającym warunkiem. Ponieważ starter gwiazda-trójkąt, ze względu na liczne kontakty, wymaga okresowej rozrywki, zadba o jego porzucenie w instytucjach, w których taka pomoc nie istnieje. Maszyna asynchroniczna - jest to elektryczna maszyna prądu przemiennego, której prędkość wirnika nie jest równa (w trybie silnikowym mniej) do częstotliwości obrotu pola magnetycznego wytwarzanej przez prąd uzwojenia stojana. Zalety: Wady: Silnik indukcyjny został po raz pierwszy zastosowany przez Galileo Ferraris w 1885 roku we Włoszech. W 1888 roku Ferraris opublikował swoje badania w artykule w Królewskiej Akademii Nauk w Turynie (później, w tym samym roku, Tesla otrzymał patent USA nr 381.968, w którym opublikował teoretyczne podstawy do zrozumienia działania silnika). Silnik indukcyjny z wirnikiem klatkowym został zaproponowany przez Dolivo-Dobrovolsky około rok później. Maszyna asynchroniczna ma stojan i wirnik, oddzielone szczeliną powietrzną. Jego aktywnymi częściami są uzwojenia i rdzeń magnetyczny; wszystkie pozostałe części są strukturalne, zapewniając niezbędną wytrzymałość, sztywność, chłodzenie, możliwość obrotu itp. Uzwojenie stojana jest uzwojeniem trójfazowym (w ogólności - wielofazowym), którego przewody są równomiernie rozmieszczone wokół obwodu stojana i układane w postaci faz w rowkach o kątowej odległości 120 stopni. Fazy uzwojenia stojana są połączone zgodnie ze standardowym schematem "trójkąt" lub "gwiazda" i połączone z siecią prądu trójfazowego. Rdzeń magnetyczny stojana został poddany ultemagnetyzacji w procesie zmiany (obrotu) strumienia magnetycznego uzwojenia wzbudzenia, dlatego jest wykonany z laminatu (zwerbowanego z płytek) ze stali elektrotechnicznej, aby zapewnić minimalne straty magnetyczne. Konstruując maszyny asynchroniczne wirnika są podzielone na dwa główne typy: zwarte rotor i z faza wirnik. Oba typy mają taką samą konstrukcję stojana i różnią się tylko wydajnością uzwojenia wirnika. Rdzeń magnetyczny wirnika jest podobny do obwodu magnetycznego stojana - od stali elektrotechnicznej i laminowanej. Asynchroniczny wirnik klatkowy Zwarte uzwojenie wirnika, często nazywane "klatką wiewiórkową" ze względu na zewnętrzne podobieństwo konstrukcji, składa się z prętów miedzianych lub aluminiowych zwartych z końców dwóch pierścieni. Rdzenie tego uzwojenia są wsuwane w rowki rdzenia wirnika. W maszynach o małej i średniej mocy, wirnik jest zwykle wytwarzany przez wlewanie stopionego stopu aluminium w rowki rdzenia wirnika. Wraz z prętami klatki wiewiórki, pierścienie zwarciowe i ostrza końcowe są odlewane, samoczynnie wentylują wirnik i wentylują maszynę jako całość. W maszynach dużej mocy "klatka wiewiórkowa" wykonana jest z miedzianych prętów, których końce są przyspawane do pierścieni zwarciowych. Często rowki wirnika lub stojana są ukosowane w celu zmniejszenia wyższych harmonicznych emitowanych przez pulsacje strumienia magnetycznego z powodu obecności zębów, których opór magnetyczny jest znacznie niższy niż opór magnetyczny uzwojenia, a także w celu zmniejszenia hałasu powodowanego przez przyczyny magnetyczne. Aby poprawić charakterystykę rozruchową asynchronicznego silnika elektrycznego za pomocą wirnika klatkowego, a mianowicie zwiększyć początkowy moment obrotowy i zmniejszyć prąd rozruchowy, na rotorze zastosowano specjalny kształt rowka. W tym samym czasie zewnętrzna część rowka wirnika zewnętrznego od osi obrotu ma mniejszy przekrój poprzeczny niż wewnętrzny. Pozwala to na wykorzystanie efektu przesunięcia prądu, dzięki czemu zwiększa się aktywny opór uzwojenia wirnika przy dużych przesuwach (przy uruchomieniu). Silniki asynchroniczne ze zwartym wirnikiem mają mały moment rozruchowy i znaczny prąd rozruchowy, co stanowi znaczącą wadę "klatki wiewiórki". Dlatego są one stosowane w tych napędach elektrycznych, które nie wymagają dużych punktów początkowych. Spośród zalet należy zwrócić uwagę na łatwość wytwarzania i brak mechanicznego kontaktu z nieruchomą częścią maszyny, co gwarantuje trwałość i zmniejsza koszty konserwacji. Ze specjalną konstrukcją rotora, gdy rdzeń magnetyczny "rotor" pozostaje nieruchomy, a tylko pusty aluminiowy cylinder (klatka wiewiórka lub zwarte uzwojenie wirnika) obraca się w szczelinie magnetycznej, możliwe jest uzyskanie małej bezwładności silnika. Wirnik fazowy ma uzwojenie trójfazowe (ogólnie - wielofazowe), zwykle połączone zgodnie z "gwiazdą" i wyświetlane na pierścieniach kontaktowych obracających się razem z wałem maszyny. Użycie szczotek metalowo-grafitowych przesuwających się wzdłuż tych pierścieni do obwodu uzwojenia wirnika: Trójfazowy asynchroniczny silnik kolektora napędzany przez wirnik. Silnik asynchroniczny, umożliwiający płynną regulację prędkości od minimum do podwójnej synchronizacji. Strukturalnie silnik to maszyna z wirnikiem fazowym, która jest zasilana. Ponadto uzwojenie stojana jest zasilane przez zespół szczotki-kolektora, który jest jednym kolektorem i dwoma zestawami szczotek obracającymi się względem siebie. Zmiana położenia szczotek, osiągnięcie różnych prędkości obrotowych. Takie silniki otrzymały największy rozwój w latach 30. XX wieku. Napięcie jest doprowadzane do uzwojenia stojana, pod działaniem którego prąd przepływa przez te uzwojenia i wytwarza wirujące pole magnetyczne. Pole magnetyczne wpływa na uzwojenie wirnika i indukuje w nich emf zgodnie z prawem indukcji magnetycznej. W uzwojeniu wirnika pod działaniem indukowanego pola elektromagnetycznego powstaje prąd. Prąd w uzwojeniu wirnika wytwarza własne pole magnetyczne, które oddziałuje z wirującym polem magnetycznym stojana. W rezultacie siła działa na każdy pręt, który, składając się wzdłuż koła, wytwarza obrotowy moment elektromagnetyczny wirnika. Gdy uzwojenie stojana jest zasilane prądem trójfazowym (zwykle wielofazowym), powstaje wirujące pole magnetyczne, którego synchroniczna prędkość obrotowa [obr / min] jest związana z częstotliwością sieci [Hz] poprzez: gdzie jest liczba par biegunów magnetycznych uzwojenia stojana. W zależności od liczby par biegunów, następujące wartości częstotliwości obrotu pola magnetycznego stojana mogą wynosić przy częstotliwości napięcia zasilającego 50 Hz: Większość silników ma 1-3 par biegunów rzadziej 4. Większa liczba biegunów jest używana bardzo rzadko, takie maszyny mają niską sprawność i współczynnik mocy. Charakterystyka mechaniczna maszyny asynchronicznej: a jest trybem odzyskiwania energii do sieci (tryb generatora), b jest trybem silnika, c jest trybem przeciw włączeniu (tryb hamulca elektromagnetycznego). Jeśli wirnik jest nieruchomy lub częstotliwość jego obrotu jest mniejsza niż synchroniczna, wówczas wirujące pole magnetyczne przecina się z przewodnikami uzwojenia wirnika i indukuje w nich emf, pod działaniem, którego prąd powstaje na uzwojeniu wirnika. Siły elektromagnetyczne działają na przewodniki z prądem tego uzwojenia, uzwojenia wzbudzenia umieszczone w polu magnetycznym; ich całkowita siła tworzy elektromagnetyczny moment obrotowy, który porywa wirnik za polem magnetycznym. Jeśli moment ten jest wystarczająco duży, rotor obraca się, a jego prędkość obrotowa w stanie ustalonym [rpm] odpowiada równości momentu elektromagnetycznego hamowania wytwarzanego przez obciążenie na wale, siły tarcia w łożyskach, wentylacji itp. Częstotliwość obrotu rotora nie może osiągnąć częstotliwości obrotu pola magnetycznego, ponieważ w tym przypadku prędkość kątowa obrotu pola magnetycznego względem uzwojenia wirnika staje się zerowa, pole magnetyczne nie będzie już indukować EMF w uzwojeniu wirnika, a z kolei generować moment obrotowy; w związku z tym, dla trybu pracy silnika maszyny asynchronicznej, nierówność jest prawdziwa: Względna różnica między częstotliwościami rotacji pola magnetycznego i wirnika jest nazywana poślizg: Oczywiście, gdy tryb silnika. Jeśli wirnik zostanie przyspieszony za pomocą zewnętrznego momentu obrotowego (na przykład silnika) do częstotliwości większej niż prędkość obrotowa pola magnetycznego, kierunek EMF w uzwojeniu wirnika i aktywny składnik prądu wirnika ulegnie zmianie, to znaczy, że maszyna asynchroniczna przejdzie do tryb generatora. Jednocześnie zmieni się kierunek i moment elektromagnetyczny, który będzie spowalniał. W trybie poślizgu generatora. Aby pracować w trybie HELL w generatorze, wymagane jest bierne źródło mocy, które wytwarza przepływ wzbudzenia. W przypadku braku początkowego pola magnetycznego w uzwojeniu stojana, przepływ wzbudzenia jest tworzony za pomocą magnesów stałych lub z aktywnym obciążeniem w wyniku resztkowej indukcji maszyny i kondensatorów połączonych równolegle z fazami uzwojenia stojana. Asynchroniczny generator zużywa prąd magnesujący o znacznej mocy i wymaga obecności generatorów mocy biernej w sieci w postaci maszyn synchronicznych, kompensatorów synchronicznych, akumulatorów kondensatorów statycznych (BSC). Pomimo łatwości konserwacji generator asynchroniczny jest wykorzystywany stosunkowo rzadko, głównie jako pomocnicze źródło małej mocy i jako urządzenie hamujące (na przykład, silnik windy lub schodzące w dół schody metra, pracuje w trybie generatora, dostarczając energię do sieci). w tym trybie dostępny jest testowy e-mail. maszyny, gdy nie ma przekładni i siłownika na wale. W tym trybie można zbadać straty przeniesienia energii stojana na wirnik i na tym etapie udoskonalono cechy konstrukcyjne poszczególnych elementów, ponieważ n2 = n1, zatem S = 0. Przy obciążeniu znamionowym S = 0,01 - 0,08 Jeśli zmienisz kierunek rotacji wirnika lub pola magnetycznego tak, aby obracały się w przeciwnych kierunkach, wówczas EMF i aktywny składnik prądu w uzwojeniu wirnika będą wysyłane w taki sam sposób, jak w trybie silnika, a urządzenie będzie zużywać moc czynną z sieci. Jednakże moment elektromagnetyczny będzie skierowany przeciwnie do momentu obciążenia, co opóźni się. W przypadku reżimu nierówności są prawdziwe: Ten tryb jest używany przez krótki czas, ponieważ generuje dużo ciepła, którego silnik nie jest w stanie rozproszyć, co może go wyłączyć. Przez kontrolę asynchronicznego silnika prądu przemiennego rozumie się zmianę prędkości wirnika i / lub jego moment obrotowy. Istnieją następujące sposoby sterowania silnikiem asynchronicznym:Urządzenie asynchroniczne urządzenia
Plan:
Wprowadzenie
Wprowadzenie
W wielu krajach maszyny zbierające są również w rankingu maszyn asynchronicznych. W Rosji maszyny zaczęto nazywać maszynami asynchronicznymi. indukcja.
Obecnie maszyny asynchroniczne stanowią większość samochodów elektrycznych. Używane są głównie jako silniki elektryczne i są głównymi przetwornikami energii elektrycznej w energię mechaniczną. 1. Historia
2. Budowa
2.1. Wirnik klatkowy
2.2. Wirnik fazowy
2.3. Silnik Schrage-Richtera
3. Zasada działania
4. Prędkość obrotowa pola stojana
n, rpm
str
3000
1
1500
2
1000
3
300
10
5. Tryby działania
5.1. Tryb silnika
5.2. Tryb generatora
5.3. Tryb bezczynności
5.4. Tryb hamulca elektromagnetycznego
6. Sposoby sterowania silnikiem asynchronicznym
Uwagi
Tekst jest dostępny na licencji Creative Commons Uznanie autorstwa-Na tych samych warunkach.