W codziennym życiu i technologii, gdzie potrzebne są silniki małej mocy, często stosuje się tak zwane jednofazowe silniki asynchroniczne. Silnik jednofazowy różni się od silnika trójfazowego tym, że jego stojan ma jedno uzwojenie (czasami dwa) i jest zasilany przez sieć jednofazowa. Wirnik tych silników ze względu na ich małą moc zawsze wykonuje się w zwarciu w postaci koła wiewiórkowego i nie różni się od wirnika. silnik trójfazowy.
Jeśli uzwojenie silnika jednofazowego jest włączone do sieci, prąd przemienny przepływający przez niego będzie wzbudzać w samochodzie, podczas gdy jego wirnik jest nieruchomy, przemienne pole magnetyczne, którego oś również jest nieruchoma. To pole będzie indukować prądy w uzwojeniu wirnika, którego oddziaływanie z polem magnetycznym doprowadzi do pojawienia się sił skierowanych przeciwnie w prawą i lewą połówkę wirnika, w wyniku czego wynikowy moment działający na wirnik będzie zerowy. Dlatego przy jednym uzwojeniu początkowy moment rozpoczęcia silnik jednofazowy
jest równy zeru, tj. taki silnik nie może samodzielnie się poruszać. Jeśli jednak za pomocą jakiejś siły zewnętrznej poinformujemy wirnik o pewnej prędkości obrotowej, wówczas zacznie się obracać.
Rozruch silników jednofazowych odbywa się za pomocą jednego lub drugiego urządzenia rozruchowego. Działanie tych urządzeń opiera się na wykorzystaniu właściwości dwóch strumieni magnetycznych, przesuniętych w przestrzeni o 90 ° i przesuniętych fazowo o pi / 2, aby utworzyć wirujące pole magnetyczne.
8.8.1. Rozruch uzwojenia silników jednofazowych
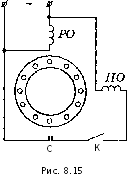
Na stojaku takiego silnika, z wyjątkiem robocze uzwojenie ROjest tzw oprogramowanie zaczyna się nawijać,obrócone w przestrzeni względem uzwojenia roboczego o 90 ° (ryc.
W momencie rozruchu uzwojenie rozruchowe jest zamykane za pomocą przycisku K, i w w wyniku połączenia transformatora powstaje w nim prąd, który jest przesunięty w fazie względem prądu zasilania o prawie pi / 2. Prądy te wytwarzają wirujące pole magnetyczne, które przyspiesza wirnik. Po przyspieszeniu uzwojenie rozruchowe otwiera się i nie bierze udziału w dalszym działaniu silnika. Silniki z takim uruchomieniem są czasami spotykane w domowych pralkach.
8.8.2. Silniki skraplaczy
W tych silnikach uzwojenie robocze i rozruchowe stojana są również przesunięte o 90 ° względem siebie na stojanie względem siebie. W momencie rozruchu uzwojenie rozruchowe oprogramowania jest podłączone do sieci za pomocą przycisku Doprzez kondensator Dzięki(rys. 8.15), dzięki czemu prąd w uzwojeniu początkowym różni się fazowo od prądu w uzwojeniu roboczym pi / 2, co zapewnia przyspieszenie wirnika.
Niektóre silniki wykorzystują dwa połączone równolegle kondensatory. C1i Dzięki 2 - oba są używane, gdy
biegnij i jeden z nich (Od 2 ) pozostaje w trakcie
praca silnika, tak aby oba zwoje działały (Rys. 8.16).
Silniki skraplaczy mają lepszą charakterystykę rozruchu i charakterystyki w porównaniu z innymi silnikami jednofazowymi, dlatego są najczęściej stosowane. 
8.8.3. Silniki jednofazowe z dzielonymi biegunami

prąd pokrywa się w fazie z emf i pozostaje w tyle za przepływem uzwojenia również przez pi / 2.
Ten prąd w pierścieniu wytwarza swój własny strumień magnetyczny, który pokrywa się z nim w fazie. Tak więc pod biegunem są dwa przesunięte fazowo strumienie magnetyczne pi / 2, tworzące wirujące pole magnetyczne. Jest to pole magnetyczne i niesie ze sobą zwarty wirnik.
Silniki Split-Polak są szeroko stosowane w napędach o małej mocy (projektory filmowe, wentylatory itp.).
Włączenie silników trójfazowych do sieci jednofazowej
W wielu przypadkach trójfazowe silniki asynchroniczne można podłączyć do sieci prądu przemiennego jednofazowego. 

Na rys. 8,18, a, bpokazuje włączenie silników trójfazowych, które mają tylko trzy końce zwojów. Skraplacz Dziękitworzy dodatkowe przesunięcie fazowe
między prądem iprzez stres przez zapewnieniepierwszy launcher chwila. Wartość tego kondensatora jest obliczana lub wybierana tak, aby zapewnić przybliżoną równość wszystkich trzech prądów fazowych. Na rys. 8,18 w, gpokazuje włączenie trójfazowych silników asynchronicznych, które mają wszystkie sześć końców uzwojenia stojana. Włączenie silników trójfazowych w sieć jednofazową umożliwia odbiór z nich tylko 40-50% ich mocy znamionowej w trybie trójfazowym.
Jak wspomniano jednofazowe silniki asynchroniczne Obecnie wykonywane są głównie jako małe maszyny o mocy rzadko przekraczającej 0,5 kW.
Stator je ma uzwojenie jednofazowektóra zwykle jest uzyskiwana z trójfazowej, połączonej w gwiazdę, z wykorzystaniem tylko dwóch jej faz. Wirnik jest dostarczany ze zwartym uzwojeniem klatkowym.
Jeśli uzwojenie stojana zasilane jest prądem przemiennym jednofazowym, powstanie zmienna (pulsująca) wartość NS. W stacjonarnym wirniku w samochodzie pojawia się naprzemienne (pulsujące) pole. Będzie indukować prądy w uzwojeniu wirnika, tak jak w uzwojeniu wtórnym transformatora. Rysunek 2.21 pokazuje kierunki prądów w przewodach zwartego wirnika w obecności pola pulsującego.
Ryc. 2.21. Prądy w przewodach uzwojenia wirnika silnika jednofazowego ze stałym wirnikiem
Oczywiście, wynikowy moment działający na wirnik będzie wynosił zero, ponieważ siły elektromagnetyczne od oddziaływania pola i prądy w uzwojeniu wirnika na jego prawej i lewej połowie będą równe i przeciwne.
Brak początkowego momentu obrotowego jest charakterystyczną cechą silnika jednofazowego z tym schematem połączeń. Dlatego on sam nie może się ruszyć. Jednakże, jeśli obrócisz wirnik za pomocą siły obcej, silnik będzie nadal obracał się niezależnie i może zostać załadowany.
Podobne zjawiska można zaobserwować w silniku trójfazowym z przerwą w jednym z przewodów zasilających. Jeżeli drut zostanie uszkodzony na nieruchomym silniku, nie będzie on wytwarzał momentu obrotowego na starcie i nie będzie się ruszał. Jeśli drut zostanie uszkodzony na obrotowym silniku trójfazowym, wówczas ten drugi będzie nadal działał jako jednofazowy. Ale jego moc w tym samym czasie powinna zostać zmniejszona do 50 ... 55% nominalnej.
Tryb działania silnika trójfazowego jako jednofazowego nie może być dozwolony, gdy moc na jego wale jest zbliżona do nominalnej, ponieważ jego uzwojenia ze względu na wzrost prądów w nich w tym trybie nagrzewa się nadmiernie w krótkim czasie.
Aby wyjaśnić powyższe zjawiska, zastępujemy zmienną pulsującą wzdłuż jednej osi NS. stojan dwa NS, obracający się w różnych kierunkach z częstotliwością synchroniczną i mający amplitudy równe połowie amplitudy pulsującego N.
Z nieruchomym wirnikiem, zarówno n. z równymi amplitudami obracającymi się względem wirnika o tej samej częstotliwości synchronicznej. Wywołane przez nie pola będą miały tę samą amplitudę. Będą indukować te same prądy w uzwojeniu wirnika. Dlatego momenty wynikające z oddziaływania pól i indukowanych przez nie prądów będą sobie równe. Ponieważ działają one w przeciwnych kierunkach, wynikowy moment wynosi zero. W konsekwencji sam wirnik nie może się obracać. Jeśli, jak wspomniano, w jakiś sposób obrócić go w dowolnym kierunku, to w tym kierunku obróci się niezależnie i osiągnie prędkość zbliżoną do synchronicznej.
Pole, które obraca się w tym samym kierunku, co wirnik, nazywa się wirowaniem bezpośrednim lub bezpośrednim, a drugie pole wiruje odwrotnie lub odwrotnie. Gdy wirnik obraca się, oba te pola są nierówne: pole wsteczne jest osłabione, podczas gdy pole wirujące bezpośrednio jest wzmacniane. Przy prędkości obrotowej zbliżonej do synchronicznej odwrotne pole jest osłabione tak bardzo, że powstałe pole staje się prawie okrągłe.
Osłabienie pola wstecznego podczas pracy silnika jednofazowego wyjaśniono w następujący sposób. Jeśli wirnik ma poślizg s względem bezpośredniego pola, to będzie miał poślizg względem pola odwrotnego:
![]()
W konsekwencji prądy indukowane przez odwrotne pole w uzwojeniu wirnika będą miały wysoką częstotliwość, na przykład gdy s = 0,05, to jest (2-s) f 1 = 1,95 · 50 = 97,5 Hz. Indukcyjna rezystancja uzwojenia wirnika przy tej częstotliwości będzie wielokrotnie większa niż jego rezystancja czynna. Prądy będą prawie czysto reaktywne; będą one miały silne działanie odmagnesowujące, tj. osłabić pole zwrotne.
Tak więc, przy małych wartościach poślizgu, moment obrotowy w silnikach jednofazowych powstaje głównie w wyniku oddziaływania pola bezpośredniego i prądów indukowanych w uzwojeniu wirnika. Moment hamowania z interakcji odwrotnego pola, silnie osłabionego i prądów (prawie czysto reaktywnych) indukowanych przez nie w uzwojeniu wirnika ma niewielkie znaczenie.

Ryc. 2.22. Jednofazowe krzywe momentu obrotowego silnika
Ponieważ prąd w wirniku jednofazowego silnika jest utworzony przez superpozycję dwóch prądów o wyraźnie różnych częstotliwościach, straty elektryczne w wirniku można uznać za równe sumie strat powodowanych przez każdy z prądów oddzielnie. Dlatego straty elektryczne w wirniku silnika jednofazowego są około dwa razy większe niż te same straty w wirniku silnika trójfazowego o odpowiedniej mocy. Mamy tu na myśli silniki z takim uzwojeniem wirnika, których nie można rozpatrywać przy przemieszczeniu prądu w jego przewodnikach. Jeżeli silniki mają głębokie rowki lub podwójną klatkę na wirniku, to straty z prądów indukowane przez przeciwne pole w przewodach uzwojenia wirnika znacznie wzrastają ze względu na przemieszczenie w nich prądu.
Dodatkowo, silnik jednofazowy cos jest niższy od silnika trójfazowego, od pierwszego bardziej aktualne na biegu jałowym (ze względu na jego składnik reaktywny). To ostatnie stanie się jasne, jeśli weźmiemy pod uwagę działanie silnika obracającego się z prędkością synchroniczną, gdy uzwojenie wirnika jest otwarte i zamknięte. W pierwszym przypadku, zarówno n. - bezpośrednie i wsteczne - wytworzą te same pola, sugerując EMF w uzwojeniu stojana, równoważąc prawie całe przyłożone napięcie.
W drugim przypadku odwrotność n. jest tworzony nie tylko przez prądy stojana, ale także przez prądy wirnika wywołane przez pole wsteczne; to, podobnie jak pole odwrotne, jest znacznie osłabione. Dlatego bezpośredni ns w tym przypadku stojan powinien się zwiększać, aby tworzone przez niego bezpośrednie pole indukowało emf w uzwojeniu stojana, które prawie całkowicie równoważy przyłożone napięcie. W drugim przypadku prąd stojana będzie prawie 2 razy większy niż w pierwszym przypadku. To tłumaczy wzrost prądu jałowego silnika jednofazowego.
Zwiększenie poślizgu powoduje zatem wzrost momentu hamowania z pola wstecznego maksymalny moment silnik jednofazowy jest mniejszy niż odpowiadający mu silnik trójfazowy.
Sprawność silnika jednofazowego jest również niższa ze względu na zwiększone straty w uzwojeniu wirnika, jak również w uzwojeniu stojana spowodowane degradacją cos.
Silnik jednofazowy jest zwykle uruchamiany, gdy na stojanie znajduje się faza pomocnicza, która jest uzwojeniem umieszczonym w szczelinach stojana, dzięki czemu jego napięcie prądu jest został przesunięty przestrzennie o 90 el. grad, stosunkowo n. główne uzwojenie stojana. Prąd w uzwojeniu pomocniczym musi być w fazie względem głównego prądu uzwojenia. Jeśli te warunki zostaną stworzone, oba uzwojenia spowodują obracanie się pola magnetycznego. Będzie on asymetryczny, ale moment, w którym powstaje mały moment hamujący na wale, jest wystarczający, aby uruchomić silnik w ruchu. Uzwojenie pomocnicze jest wyłączane, gdy silnik osiąga w przybliżeniu normalną prędkość, ponieważ oblicza się go dla obciążenia krótkotrwałego.
Dlatego też, gdy silnik pracuje jako dwufazowy i przy normalnej prędkości - jako jednofazowy. Aby uzyskać prąd w uzwojeniu pomocniczym, przesunięty fazowo w stosunku do prądu w uzwojeniu głównym, rezystancja (rys. 2.23, a) lub pojemność (rys. 2.23, b) jest dołączona szeregowo do pierwszego.

Ryc. 2.23. Jednofazowe obwody rozruchowe silnika
Zastosowanie pojemności umożliwia przesunięcie fazowe między wskazanymi prądami o 90 °, co daje znaczny wzrost początkowego momentu obrotowego.
Jednak rozprzestrzenianie silniki jednofazowe, w którym faza pomocnicza i połączona szeregowo z nią pojemność pozostają włączone przez cały czas pracy silnika. Takie silniki kondensatorów, w porównaniu do konwencjonalnych silników jednofazowych pracujących z odłączoną fazą pomocniczą, mają wyższy maksymalny moment obrotowy i lepszą sprawność i cos.
Podobnie jak większość silników elektrycznych, silnik indukcyjny AC (BP) ma stałą część zewnętrzną, zwaną stojanem, oraz rotor obracający się wewnątrz. Pomiędzy nimi znajduje się starannie wyliczona szczelina powietrzna.
Konstrukcja i zasada działania silników asynchronicznych, podobnie jak wszystkie inne, opierają się na tym, że rotacja służy do ustawienia wirnika w ruchu. pole magnetyczne. Trójfazowe ciśnienie krwi jest jedynym rodzajem silnika, w którym jest on wytwarzany w sposób naturalny ze względu na naturę źródła zasilania. W tym celu stosuje się przełączanie mechaniczne lub elektroniczne, aw jednofazowym HELL stosowane są dodatkowe elementy elektryczne.
Silnik elektryczny wymaga dwóch zestawów elektromagnesów. Zasada działania asynchroniczny silnik elektryczny polega na tym, że w stojanie powstaje jeden zestaw, ponieważ źródło prądu przemiennego jest podłączone do jego uzwojenia. Zgodnie z prawem Lenza wywołuje to siłę elektromagnetyczną (EMF) w wirniku, tak jak indukowane jest napięcie w uzwojeniu wtórnym transformatora, tworząc inny zestaw elektromagnesów. Stąd i jeszcze jedna nazwa HELL - silnik indukcyjny. Konstrukcja i zasada działania silników asynchronicznych opiera się na fakcie, że interakcja pomiędzy polami magnetycznymi tych elektromagnesów generuje moment obrotowy. W rezultacie wirnik obraca się w kierunku powstałej chwili.
Stojan składa się z kilku cienkich płyt z aluminium lub żeliwa. Są one prasowane razem w celu utworzenia pustego cylindra z rowkami. Oni są położeni izolowany drut. Każda grupa uzwojeń wraz z otaczającym je rdzeniem, po przyłożeniu do niego prądu przemiennego, wytwarza elektromagnes. Liczba biegunów BP zależy od wewnętrznego połączenia uzwojeń stojana. Jest on wykonany w taki sposób, że po podłączeniu źródła zasilania powstaje wirujące pole magnetyczne.
Wirnik składa się z kilku cienkich blach stalowych z równomiernie rozmieszczonymi prętami wykonanymi z aluminium lub miedzi. W najpopularniejszym typie, zwartym, czyli "klatce wiewiórki", pręty na końcach są połączone mechanicznie i elektrycznie za pomocą pierścieni. Ta konstrukcja jest używana w prawie 90% ciśnienia krwi, ponieważ jest prosta i niezawodna. Wirnik składa się z cylindrycznego rdzenia płytowego z osiowo rozmieszczonymi równoległymi rowkami do montażu przewodów. W każdym rowku układa się pręt miedzi, aluminium lub stopu. Są one zwierane po obu stronach za pomocą pierścieni końcowych. Ten wzór przypomina klatkę wiewiórkową, dlatego otrzymał odpowiednią nazwę.
Rowki wirnika nie są dokładnie równoległe do wału. Są one wykonane z niewielkim odchyleniem z dwóch głównych powodów. Pierwszym z nich jest zapewnienie płynnego działania ciśnienia krwi poprzez zmniejszenie szumu magnetycznego i harmonicznych. Drugi polega na zmniejszeniu prawdopodobieństwa zablokowania wirnika: jego zęby zazębiają się ze szczelinami stojana z powodu bezpośredniego przyciągania magnetycznego między nimi. Dzieje się tak, gdy ich liczba pasuje. Wirnik jest zamontowany na wale z łożyskami na każdym końcu. Jeden kawałek zwykle wystaje więcej niż drugi, aby napędzać ładunek. W niektórych silnikach pozycje są przymocowane do jałowego końca wału.
Między stojanem a rotorem znajduje się szczelina powietrzna. Energia jest przez nie przekazywana. Wygenerowany moment obrotowy powoduje rotację wirnika i obciążenia. Bez względu na rodzaj zastosowanego wirnika, urządzenie i zasadę działania silnik indukcyjny pozostają niezmienione. Z reguły ciśnienie krwi jest klasyfikowane przez liczbę uzwojeń stojana. Istnieją jednofazowe i trójfazowe silniki elektryczne.

Jednofazowe ciśnienie krwi stanowi największą część silników elektrycznych. Logiczne jest, że najtańszy i najtańszy silnik jest najczęściej używany. Jak sama nazwa wskazuje, cel, zasada działania tego typu silnika asynchronicznego opiera się na obecności tylko jednego uzwojenia stojana i pracy z jednofazowym źródłem zasilania. Wszystkie BP tego typu mają zwarcie wirnika.
Silniki jednofazowe nie uruchamiają się same. Gdy silnik jest podłączony do źródła zasilania, uzwojenie główne zaczyna płynąć prąd przemienny. Generuje pulsujące pole magnetyczne. Ze względu na indukcję wirnik jest zasilany energią. Ponieważ główne impulsy pola magnetycznego nie generują momentu potrzebnego do obrotu silnika. Wirnik zaczyna wibrować, a nie obracać. Dlatego do jednofazowego ciśnienia krwi wymaga wyzwalacza. Może zapewnić początkowe naciśnięcie, zmuszając wał do poruszania się.
Mechanizm rozruchowy jednofazowej AD składa się głównie z dodatkowego uzwojenia stojana. Ona może towarzyszyć kondensator szeregowy lub przełącznik odśrodkowy. Po przyłożeniu napięcia zasilania prąd w uzwojeniu głównym pozostaje w tyle za napięciem z powodu jego rezystancji. Jednocześnie energia elektryczna w uzwojeniu początkowym jest opóźniona lub prowadzi napięcie zasilania, w zależności od impedancji mechanizmu spustowego. Interakcja między polami magnetycznymi generowanymi przez uzwojenie główne i obwód rozruchowy tworzy wypadkowe pole magnetyczne. Obraca się w jednym kierunku. Wirnik zaczyna się obracać w kierunku powstałego pola magnetycznego.
Po osiągnięciu prędkości silnika około 75% nominalnej, przełącznik odśrodkowy wyłącza uzwojenie początkowe. Ponadto, silnik może utrzymać wystarczający moment obrotowy, aby działać niezależnie. Z wyjątkiem silników ze specjalnym kondensatorem rozruchowym, wszystko jest zwykle wykorzystywane do wytwarzania mocy nieprzekraczającej 500 watów. W zależności od różnych metod początkowych, BP jednofazowe jest dodatkowo klasyfikowane zgodnie z opisem w poniższych sekcjach.

Cel, budowa i zasada działania silnika asynchronicznego podzielonej fazy opierają się na wykorzystaniu dwóch uzwojeń: początkowego i głównego. Launcher jest wykonany z drutu o mniejszej średnicy i mniejszej liczbie zwojów w stosunku do głównej, w celu stworzenia większej odporności. Dzięki temu jego pole magnetyczne może być zorientowane pod kątem. Różni się od kierunku głównego pola magnetycznego, co prowadzi do rotacji wirnika. Uzwojenie robocze, wykonane z drutu o większej średnicy, zapewnia funkcjonowanie silnika w innym czasie.
Początkowy moment obrotowy jest niski, z reguły od 100 do 175% nominalnego. Silnik zużywa wysoki prąd rozruchowy. Jest 7-10 razy wyższa niż nominalna. Maksymalny moment obrotowy jest również 2,5-3,5 razy większy. Silniki tego typu stosowane są w małych szlifierkach, wentylatorach i dmuchawach, a także w innych urządzeniach wymagających niskiego momentu obrotowego o wydajności od 40 do 250 watów. Należy unikać stosowania takich silników, gdy cykle włączania / wyłączania są częste lub wymagany jest wysoki moment obrotowy.
Typ silnika asynchronicznego kondensatora i zasada jego działania opierają się na tym, że pojemność dostarczająca początkowego "impulsu" jest sekwencyjnie połączona z uzwojeniem rozruchowym z fazą rozdzieloną. Podobnie jak w poprzednim typie silników, istnieje również przełącznik odśrodkowy. Wyłącza obwód rozruchowy, gdy prędkość obrotowa silnika osiągnie 75% wartości znamionowej. Ponieważ kondensator jest połączony szeregowo, powoduje to większy moment rozruchowy, osiągając 2-4 razy więcej niż rozmiar pracownika. Prąd rozruchowy wynosi z reguły 4.5-5.75-krotność prądu znamionowego, który jest znacznie niższy niż w przypadku fazy rozdzielonej, ze względu na większy drut w uzwojeniu początkowym.
Zmodyfikowana opcja startu charakteryzuje się silnikiem rezystancyjnym. W tym typie pojemność silnika jest zastępowana przez rezystor. Opór jest używany, gdy wymagany jest niższy moment rozruchowy, niż przy użyciu kondensatora. Oprócz niższych kosztów, nie daje to przewagi nad startem pojemnościowym. Silniki te są stosowane w napędach pasowych: małych przenośnikach, dużych wentylatorach i pompach, a także w wielu urządzeniach z napędem bezpośrednim lub skrzynią biegów.

Konstrukcja i zasada działania asynchronicznego silnika tego typu opiera się na stałym połączeniu kondensatora szeregowo z uzwojeniem początkowym. Po osiągnięciu prędkości znamionowej silnika obwód rozruchowy staje się pomocniczy. Ponieważ pojemność musi być zaprojektowana do ciągłego użytkowania, nie może dostarczyć początkowego impulsu kondensator rozruchowy. Moment rozruchowy takiego silnika jest niski. Jest to 30-150% wartości nominalnej. Prąd rozruchowy jest niewielki - mniej niż 200% wartości znamionowej, co powoduje, że silniki elektryczne tego typu są idealne tam, gdzie wymagane jest częste włączanie i wyłączanie.
Ten projekt ma kilka zalet. Schemat można łatwo zmienić w celu użycia z kontrolerami prędkości. Silniki elektryczne można dostroić pod kątem optymalnej wydajności i wysokiego współczynnika mocy. Są uważane za najbardziej niezawodne z silników jednofazowych, głównie dlatego, że nie używają odśrodkowego przełącznika rozruchu. Używany w wentylatorach, dmuchawach i często włączanych urządzeniach. Na przykład w mechanizmach regulacyjnych, systemach otwierania drzwi i bramach garażowych.

Konstrukcja i zasada działania asynchronicznego silnika tego typu opiera się na połączeniu szeregowym kondensatora rozruchowego z uzwojeniem początkowym. Dzięki temu można uzyskać większy moment obrotowy. Ponadto ma stały kondensator połączony szeregowo z uzwojeniem pomocniczym po odłączeniu pojemności początkowej. Schemat ten pozwala na duże przeciążenie momentu obrotowego.
Ten typ silnika jest zaprojektowany dla niższych prądów pełnego obciążenia, co zapewnia jego większą wydajność. Ta konstrukcja jest najbardziej kosztowna ze względu na obecność rozruchu, kondensatory robocze i przełącznik odśrodkowy. Stosowany w maszynach do obróbki drewna, sprężarkach powietrza, wysokociśnieniowych pompach wodnych, pompach próżniowych i wszędzie tam, gdzie wymagany jest wysoki moment obrotowy. Moc - od 0,75 do 7,5 kW.
Konstrukcja i zasada działania silnika asynchronicznego tego typu polega na tym, że ma on tylko jedno uzwojenie główne i nie ma wyjścia początkowego. Start jest spowodowany faktem, że wokół niewielkiej części każdego z biegunów stojana znajduje się ekranowany miedziany pierścień, w wyniku którego pole magnetyczne w danym obszarze pozostaje w tyle za polem w części nieekranowanej. Interakcja dwóch pól prowadzi do obrotu wału.
Ponieważ nie ma cewki rozruchowej, przełącznika ani kondensatora, silnik jest prosty i niedrogi pod względem elektrycznym. Ponadto jego prędkość można regulować poprzez zmianę napięcia lub uzwojenie wielodotykowe. Konstrukcja silnika z ekranowanymi słupami umożliwia masową produkcję. Zasadniczo jest on uważany za "jednorazowy", ponieważ zastąpienie go jest znacznie tańsze niż jego naprawa. Oprócz pozytywnych cech ten wzór ma kilka wad:
Niski koszt początkowy pozwala na stosowanie tego rodzaju ciśnienia krwi w urządzeniach o niskiej mocy lub rzadko używanych. To są domowe, wielobiegowe wentylatory. Ale niski moment obrotowy, niska wydajność i niskie właściwości mechaniczne nie pozwalają na ich komercyjne lub przemysłowe zastosowanie.
![]()
Te silniki elektryczne są szeroko stosowane w przemyśle. Konstrukcja i zasada działania trójfazowego silnika asynchronicznego jest określona przez jego konstrukcję - ze zwarciem lub z wirnik fazowy. Jego uruchomienie nie wymaga kondensatora, uzwojenia rozruchowego, przełącznika odśrodkowego ani innego urządzenia. Punktem wyjścia jest średni i wysoki, a także moc i wydajność. Używane w szlifierkach, tokarkach, wiertarkach, pompach, kompresorach, przenośnikach, maszynach rolniczych itp.
To jest trójfazowe asynchroniczne i urządzenie, które zostało opisane powyżej. Stanowi prawie 90% wszystkich trójfazowych silników elektrycznych. Dostępne w pojemnościach od 250 W do kilkuset kW. W porównaniu z silnikami jednofazowymi o mocy 750 W są one tańsze i wytrzymują duże obciążenia.
Urządzenie i zasada działania trójfazowego silnika asynchronicznego z wirnikiem fazowym różnią się od typu HELL klatką typu squirrel, ponieważ na wirniku znajduje się zespół uzwojeń, którego końce nie są zwarte. Pochodzą one z pierścieni ślizgowych. Pozwala to na podłączenie do nich zewnętrznych rezystorów i styczników. Maksymalny moment obrotowy jest wprost proporcjonalny do rezystancji wirnika. Dlatego przy niskich prędkościach można go zwiększyć dodatkowym oporem. Wysoka rezystancja pozwala uzyskać duży moment obrotowy przy niskim prądzie rozruchowym.
Gdy rotor przyspiesza, rezystancja maleje, aby zmienić charakterystykę silnika, aby spełnić wymagania obciążenia. Po osiągnięciu przez silnik prędkości podstawowej, rezystory zewnętrzne zostają odłączone. A silnik elektryczny działa jak normalne ciśnienie krwi. Ten typ jest idealny dla dużych obciążeń bezwładnościowych wymagających zastosowania momentu obrotowego przy prędkości bliskiej zeru. Zapewnia przetaktowanie do maksimum w minimalnym czasie przy minimalnym poborze prądu.

Wadą takich silników jest to, że pierścienie ślizgowe i szczotki wymagają regularnej konserwacji, co nie jest wymagane dla silnika rotor klatkowy. Jeżeli uzwojenie wirnika jest zamknięte i podejmowana jest próba rozruchu (tzn. Urządzenie staje się standardowym BP), przepływa w nim bardzo duży prąd. Jest 14 razy wyższa niż nominalna przy bardzo niskim momencie obrotowym wynoszącym 60% podstawy. W większości przypadków nie znajduje zastosowania.
Zmieniając zależność prędkości obrotowej od momentu obrotowego, regulując opory wirnika, można zmieniać obroty przy określonym obciążeniu. To skutecznie zmniejsza je o około 50%, jeśli obciążenie wymaga zmiennego momentu obrotowego i prędkości, co często znajduje się w maszynach drukarskich, sprężarkach, przenośnikach, podnośnikach i windach. Zmniejszenie prędkości poniżej 50% skutkuje bardzo niską wydajnością ze względu na większą rozproszoną moc rezystancji wirnika.
Obszary zastosowania. Używane są silniki asynchroniczne małej mocy (15 - 600 W) automatyczne urządzenia oraz urządzenia gospodarstwa domowego do napędzania wentylatorów, pomp i innych urządzeń, które nie wymagają regulacji prędkości. W urządzeniach gospodarstwa domowego i urządzeniach automatycznych zwykle stosuje się jednofazowe mikrosilniki, ponieważ te urządzenia i urządzenia są zwykle zasilane jednofazową siecią prądu przemiennego.
Zasada działania i silnik jednofazowy urządzenia. Uzwojenie stojana silnika jednofazowego (ryc. 4.60, a)znajduje się w szczelinach zajmujących około dwóch trzecich obwodu stojana, co odpowiada parze biegunów. W rezultacie
(patrz rozdział 3) rozmieszczenie MDS i indukcja w szczelinie powietrznej jest zbliżona do sinusoidy. Gdy prąd przemienny przechodzi przez uzwojenie, MDS pulsuje w czasie z częstotliwością sieci. Indukcja w dowolnym punkcie luki powietrznejBh = Bm sin ωt cos (πx / τ).
Zatem w silniku jednofazowym uzwojenie stojana wytwarza stały przepływ, zmieniając się w czasie, a nie kołowy przepływ obrotowy, jak w silnikach trójfazowych o symetrycznej mocy.
Aby uprościć analizę właściwości silnika jednofazowego, reprezentujemy (4,99) jako
Bx = 0,5 W sin (ωt - πx / τ) + 0,5 W sin (ωt + πx / τ),.
Oznacza to, że zastępujemy nieruchomy przepływ pulsacyjny sumą identycznych pól kołowych obracających się w przeciwnych kierunkach i mających tę samą częstotliwość obrotu: n1pr = n1 = n1. Ponieważ właściwości silnika indukcyjnego z kołowym polem wirującym są szczegółowo omówione w § 4.7 - 4.12, analiza własności silnika jednofazowego może zostać zredukowana do rozpatrzenia wspólnego działania każdego z wirujących pól. Innymi słowy, silnik jednofazowy może być reprezentowany jako dwa identyczne silniki, których wirniki są sztywno połączone (ryc. 4.60, b), z przeciwnym kierunkiem obrotu pól magnetycznych i momentami przez nie utworzonymi Mpr i Marr. Pole, którego kierunek obrotu pokrywa się z kierunkiem obrotu wirnika, nazywa się prostym; odwrotne pole - odwrotny lub odwrotny.
Załóżmy, że kierunek rotacji wirników pokrywa się z kierunkiem jednego z obracających się pól, na przykład za pomocą nпр. Następnie poślizg wirnika względem przepływu Fpr
spr = (n1pr - n2) / n1pr = (n1 - n2) / n1 = 1 - n2 / n1..
Przesuwanie wirnika w stosunku do przepływu Fabr
spbr = (n1br + n2) / n1br = (n1 + n2) / n1 = 1 + n2 / n1..
Z (4.100) i (4.101) wynika to
so6p = 1 + n2 / n1 = 2 - spr..
Momenty elektromagnetyczne Mpr i Marr utworzony przez pola bezpośrednie i odwrotne są skierowane w przeciwnych kierunkach, a wynikowy moment silnika jednofazowego Mcięcie jest równe różnicy momentów przy tej samej prędkości wirnika.
Na rys. 4,61 pokazuje zależność M = f (s) dla silnika jednofazowego. Biorąc pod uwagę obraz, możemy wyciągnąć następujące wnioski:
a) silnik jednofazowy nie ma momentu rozruchu; obraca się w kierunku, w którym jest napędzany siłą zewnętrzną; b) prędkość obrotowa silnika jednofazowego, gdy na biegu jałowym jest mniej niż na biegu jałowym silnika trójfazowego, z powodu obecności momentu hamującego utworzonego przez pole wsteczne;
c) działanie silnika jednofazowego jest gorsze niż działanie trójfazowe; ma zwiększony poślizg przy obciążeniu znamionowym, mniejszą wydajność, mniejszą wytrzymałość na przeciążenia, co tłumaczy się również obecnością odwrotnego pola;
d) moc silnika jednofazowego wynosi około 2/3 mocy silnika trójfazowego o tej samej wielkości, ponieważ w silniku jednofazowym uzwojenie robocze zajmuje tylko 2/3 szczelin stojana. Napełnij wszystkie gniazda stojana
ponieważ w tym przypadku stosunek uzwojenia jest niewielki, zużycie miedzi wzrasta około 1,5 razy, podczas gdy moc wzrasta tylko o 12%.Uruchamianie urządzeń. Aby uzyskać moment rozruchowy, silniki jednofazowe mają uzwojenie początkowe przesunięte o 90 stopni elektrycznych w stosunku do głównego uzwojenia roboczego. Na czas rozruchu uzwojenie początkowe jest połączone z siecią za pomocą elementów zmieniających fazę - pojemności lub rezystancji. Po zakończeniu przyspieszania silnika uzwojenie początkowe zostaje odłączone, a silnik kontynuuje pracę jako jednofazowy. Ponieważ uzwojenie początkowe działa tylko przez krótki czas, jest wykonane z drutu o mniejszej przekroju niż pracująca i ułożone w mniejszą liczbę szczelin.
Rozważmy szczegółowo proces rozruchu przy użyciu pojemności C jako elementu zmieniającego fazę (ryc. 4.62, a). Na uzwojeniu początkowym F napięcie
Ú
1n = Ú
1
- Ú
C = Ú
1
+jÍ1n XCtj. jest przesunięty fazowo w stosunku do napięcia sieciowego U1 przymocowany do uzwojenia roboczego R. W związku z tym obecne wektory w pracy Ja1p i launcher JaUzwojenia 1p są przesunięte fazowo o pewien kąt. Wybierając w pewien sposób pojemność kondensatora zmieniającego fazę, można uzyskać tryb pracy przy uruchomieniu, który jest zbliżony do symetrycznego (rys. 4.62, b), tj. W celu uzyskania okrągłego pola wirującego. Na rys. 4,62, w pokazanych zależnościach M = f (s) dla silnika z włączonym uzwojeniem początkowym (krzywa 1) i wyłączonym (krzywa 2). Silnik jest uruchamiany na częściach ab cechy 1; w punkcie b uzwojenie początkowe jest wyłączone, aw przyszłości silnik się rozdzieli co cechy 2.
Ponieważ włączenie drugiego uzwojenia znacząco poprawia się charakterystyka mechaniczna W niektórych przypadkach silnik wykorzystuje silniki jednofazowe, w których uzwojenia A i B
włączone przez cały czas (ryc. 4.63, a). Takie silniki nazywane są kondensatorami.Oba zwoje silników kondensatorów zajmują, z reguły, tę samą liczbę gniazd i mają tę samą moc. Podczas uruchamiania silnika kondensatora w celu zwiększenia momentu rozruchowego zaleca się zwiększenie pojemności Cp + Cn. Po przyspieszeniu silnika przez charakterystykę 2 (Rys. 4.63, b) i zmniejszenie prądu, niektóre kondensatory ŃN są odłączone tak, że w trybie nominalnym (gdy prąd silnika staje się mniejszy niż przy uruchomieniu) wzrost pojemność oraz w celu zapewnienia działania silnika w warunkach zbliżonych do pracy z kołowym polem wirującym. W takim przypadku silnik działa zgodnie z charakterystyką 1.
Silnik kondensatora ma wysoki cos φ. Jego wadą jest stosunkowo duża masa i wymiary kondensatora, a także występowanie prądu niesinusoidalnego ze zniekształceniem napięcia zasilania, co w niektórych przypadkach prowadzi do szkodliwych skutków na liniach komunikacyjnych.
W warunkach słabego oświetlenia (niewielki moment obciążenia w okresie rozruchu) stosowane są silniki z oporem rozruchowym. R (rys. 4.64, a). Obecność rezystancji czynnej w obwodzie uzwojenia rozruchowego zapewnia mniejsze przesunięcie fazowe φp między napięciem a prądem w tym uzwojeniu (rys. 4.64, b) niż przesunięcie fazowe φp w uzwojeniu roboczym. W związku z tym prądy w uzwojeniach roboczych i rozruchowych są przesunięte fazowo o kąt φр - φп i tworzą asymetryczne (eliptyczne) pole wirujące, dzięki czemu powstaje moment rozruchowy. Silniki o oporności początkowej są niezawodne w działaniu i są dostępne w handlu. Opór początkowy wbudowany jest w obudowę silnika i chłodzony tym samym powietrzem, które chłodzi cały silnik.
Mikrosilniki jednofazowe z ekranowanymi biegunami. W tych silnikach uzwojenie stojana, podłączone do sieci, jest zwykle skoncentrowane i wzmocnione na wyraźnie zaznaczonych biegunach (ryc. 4.65, a), których arkusze są wytłoczone razem ze stojanem. W każdym biegunie jedna z końców jest pokryta przez uzwojenie pomocnicze składające się z jednego lub kilku zwartych zwojów, których osłona od łuku 1/5 do 1/2 bieguna. Wirnik silnika jest zwarty, zwykłego typu.
Strumień magnetyczny maszyny generowany przez uzwojenie stojana (przepływ na słupie) można przedstawić jako sumę dwóch składników (rys. 4.65, b) Фп = Фп1 + Фп2, gdzie Фп1 to przepływ przepływający przez część bieguna nieobjętą zwarciem cewki; Фп2 - strumień przechodzący przez część bieguna osłoniętego zwarciem.
Przepływy Fp1 i Fp2 przechodzą przez różne części wierzchołka bieguna, to znaczy są przemieszczane w przestrzeni o kąt β. Ponadto są przesunięte fazowo w stosunku do MDS Fp uzwojenia stojana pod różnymi kątami - γ1 i γ2. Wyjaśnia to fakt, że każdy biegun opisanego silnika można rozpatrywać w pierwszym przybliżeniu jako transformator, którego uzwojeniem pierwotnym jest uzwojenie stojana, a uzwojenie wtórne jest zwartą cewką. Obecny jest prąd uzwojenia stojana zamknięta pętla Emf E(rys. 4.65, c), w wyniku czego powstaje prąd Jak i MDS Fk, składanie za pomocą MDS Fp uzwojenie stojana. Reactive Current Component Jak zmniejsza strumień Php2, a aktywny przesuwa go w fazie względem MDS Fstr. Ponieważ przepływ Fp1 nie obejmuje zwarcia, kąt γ1 ma stosunkowo małą wartość (4-9 °) - mniej więcej taki sam, jak kąt fazowy między przepływem transformatora i MDS uzwojenia pierwotnego na biegu jałowym. Kąt γ2 jest znacznie większy (około 45 °),
tj. tak jak w transformatorze ze zwarciem wtórnym uzwojenia (na przykład w transformatorze prądu pomiarowego). Wynika to z faktu, że straty mocy, od których zależy kąt γ2, są determinowane nie tylko przez straty mocy magnetycznej w stali, ale również straty elektryczne w zamkniętej pętli.Przepływy Fp1 i Fp2, przesunięte w przestrzeni o kąt β i przesunięte fazowo w czasie o kąt γ = γ2 - γ1, tworzą eliptyczne wirujące pole magnetyczne (patrz rozdział 3), które wytwarza moment obrotowy działający na wirnik silnika w kierunku od pierwsza końcówka bieguna, nie pokryta zwartą cewką, do drugiej końcówki (zgodnie z naprzemiennością maksimów przepływów "faz").
Aby zwiększyć początkowy moment obrotowy rozpatrywanego silnika przez zbliżenie jego pola wirującego do okrągłego, stosowane są różne metody: boczniki magnetyczne są zainstalowane pomiędzy końcami biegunów sąsiednich biegunów, które zwiększają sprzężenie magnetyczne między uzwojeniem głównym a zwartą cewką i poprawiają kształt pola magnetycznego w szczelinie powietrznej; zwiększyć szczelinę powietrzną pod końcówką, nie objętą zwartą cewką; użyj dwóch lub więcej zwartych zwojów na jednej końcówce o różnych kątach zasięgu. Istnieją również silniki bez zwartych zwojów na biegunach, ale z asymetrycznym układem magnetycznym: różne konfiguracje poszczególnych części bieguna i różne szczeliny powietrzne. Takie silniki mają mniejszy moment rozruchowy niż silniki z ekranowanymi biegunami, ale ich sprawność jest większa, ponieważ nie mają one strat mocy w zwartych cewkach.
Rozważane konstrukcje silników z ekranowanymi biegunami są nieodwracalne. Do realizacji rewersu w takich silnikach zamiast zwartych cewek używano cewek B1, B2, B3i B4(rys. 4.65, w), z których każdy obejmuje połowę słupa. Zwarcie pary cewek B1i B4lub B2i B3można osłonić jedną lub drugą połowę słupa iw ten sposób zmienić kierunek obrotu pola magnetycznego i wirnika.
Silnik z ekranowanymi biegunami ma wiele istotnych wad: stosunkowo duży całkowite wymiary i masa; niskie cos φ ≈ 0,4 ÷ 0,6; niska sprawność η = 0,25 ÷ 0,4 ze względu na duże straty w zwarciu; mały moment rozruchowy itp. Zaletami silnika są prostota konstrukcji, a co za tym idzie wysoka niezawodność działania. Ze względu na brak zębów na stojanie, hałas silnika jest znikomy, dlatego jest często używany w urządzeniach do odtwarzania muzyki i mowy.