Rotatory elektromagnetyczne działają na wirnik i bieguny stojana.
momenty tej samej wielkości i skierowane w przeciwnych kierunkach.
Moc wymagana do obracania biegunów stojana z częstotliwością synchroniczną
gdzie jest prędkość kątowa.
Moc mechaniczna opracowana przez wirnik
gdzie  - prędkość kątowa wirnika.
- prędkość kątowa wirnika.
Różnica mocy
gdzie R E2 - straty elektryczne w uzwojeniu wirnika;
m 2 - liczba faz uzwojenia wirnika;
R 2 - aktywna rezystancja uzwojenia wirnika;
I 2 - prąd wirnika.
skąd 
Moment obrotowy:
 (12.4).
(12.4).
gdzie CT jest współczynnikiem przekształcenia silnika z hamowanym wirnikiem,
 - stała.
- stała.
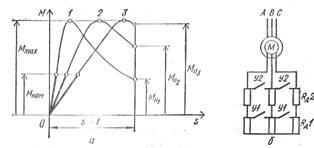
Na rys. 12.5 pokazuje zależność momentu elektromagnetycznego od poślizgu w postaci ciągłej linii.
Pozwól siłownik, napędzany obrotowo przez ten silnik, wytwarza przeciwny moment hamowania M2.
Na rysunku 12.5 są dwa punkty, dla których równość M um = M 2
;
to są punkty a
i w
.
W punkcie a
silnik pracuje stabilnie. Jeśli silnik pod wpływem jakiejkolwiek przyczyny zmniejszy prędkość obrotową, wówczas jego poślizg wzrośnie, a wraz z nim zwiększy się moment obrotowy. W rezultacie prędkość silnika wzrośnie, a waga zostanie przywrócona. M um = M 2
;.
W punkcie w
działanie silnika nie może być stabilne: przypadkowe odchylenie prędkości obrotowej spowoduje zatrzymanie silnika lub dojście do punktu a
.
W rezultacie cała rosnąca gałąź charakterystyki jest obszarem stabilnej pracy silnika, a cała malejąca część jest obszarem niestabilnej pracy. Punkt b
, odpowiadający maksymalnemu momentowi, oddziela obszary stabilnej i niestabilnej pracy.
Maksymalna wartość momentu obrotowego odpowiada krytycznemu poślizgowi S k
. Slip S = 1
odpowiada punktowi początkowemu. Jeśli wielkość momentu hamowania przeciwnego M 2
więcej rozruchu MP, silnik po włączeniu nie uruchomi się, pozostanie nieruchomy.
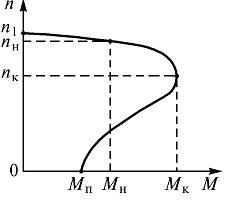
Charakterystyka mechaniczna silnik indukcyjny nazywane jest zależnością prędkości obrotowej silnika od momentu obrotowego na wale n 2 = f (M 2). Charakterystykę mechaniczną otrzymuje się w warunkach U 1 - const, f 1 - const. Charakterystyką mechaniczną silnika jest zależność momentu obrotowego od poślizgu, zbudowanego w innej skali. Na rys. 12.6 przedstawia typowy charakterystyka mechaniczna silnik asynchroniczny.
Przy rosnącym obciążeniu wielkość momentu obrotowego na wale wzrasta do pewnej wartości maksymalnej, a prędkość obrotowa maleje. Zasadniczo moment rozruchowy silnika asynchronicznego jest mniejszy niż maksimum. Wynika to z faktu, że w trybie rozruchu, gdy n 2 = 0 i S = 1, silnik indukcyjny jest w trybie podobnym do zwarcie w transformatorze. Pole magnetyczne wirnika jest skierowane przeciwnie do pola magnetycznego stojana.
Wynikowy lub główny strumień magnetyczny w szczelinie powietrznej maszyny w trybie rozruchu, jak również EMF w stojanie i wirniku E 1 i E 2 są znacznie zmniejszone. Prowadzi to do zmniejszenia początkowego momentu obrotowego silnika i do gwałtownego wzrostu prądu rozruchowego.
12.4. Regulacja częstotliwości obrotów silników asynchronicznych.
Asynchroniczne odwracanie silnika
Ze wzoru (12.2) otrzymujemy
 . (12.11)
. (12.11)
Z wzoru (12.11) można zauważyć, że prędkość obrotową silnika asynchronicznego można zmienić na trzy sposoby:
1. poprzez zmianę częstotliwości napięcia zasilania;
2. Zmieniając liczbę biegunów silnika. W tym celu umieszcza się uzwojenie w szczelinach stojana, które można przełączać na inną liczbę biegunów;
3. zmiana poślizgu. Ta metoda może być stosowana w silnikach asynchronicznych z wirnik fazowy. W tym celu reostat regulacyjny wchodzi w skład obwodu wirnika. Zwiększenie aktywnego oporu obwodu wirnika prowadzi do zwiększenia poślizgu od S a do S g (patrz rys. 12.5), aw konsekwencji do zmniejszenia prędkości silnika.
Silniki asynchroniczne są proste w konstrukcji i niezawodne w działaniu. Wadą silników asynchronicznych jest trudność w kontrolowaniu ich prędkości obrotowej.
Aby odwrócić trójfazowy silnik asynchroniczny (zmienić kierunek obrotów silnika na przeciwny), należy zamienić dwie fazy, to znaczy zamienić dowolne dwa druty liniowe odpowiednie dla uzwojenia stojana silnika.
Dla każdego silnika asynchronicznego można wyznaczyć tryb znamionowy, to jest tryb pracy ciągłej, w którym silnik nie przegrzewa się powyżej temperatury zadanej. Zostaje wywołana liczba M odpowiadająca trybowi nominalnemu. moment nominalny. Odpowiadający temu poślizg nominalny dotyczy silników asynchronicznych o średniej mocy s H0M = 0,02 ... 0,06, tj. znamionowa prędkość n i om jest w ramach
n Mr. = n 0 (1 - s 0) = (0,94 ... 0,98) n 0
Postawa maksymalny moment do nominalnego do m = = Mmax / M Pan nazwał przeciążenie silnika asynchronicznego. Zwykle k t = 1,8 ... .2,5.
Podczas rozruchu, czyli podczas rozruchu i przyspieszania, silnik asynchroniczny znajduje się w warunkach znacznie różniących się od warunków normalnej pracy. Moment opracowany przez silnik musi przekraczać moment oporu ładunku, w przeciwnym razie silnik nie będzie w stanie przyspieszyć. Tak więc, biorąc pod uwagę uruchomienie silnika, jego moment rozruchowy odgrywa ważną rolę.
Stosunek początkowego momentu obrotowego Mp opracowany przez silnik w stanie stacjonarnym, tj. Z n = 0, do nominalnego momentu obrotowego k p = M p / M nom jest nazywany krotnością początkowego momentu obrotowego.
Maksymalny moment M max nazywany jest krytycznym momentem maszyny asynchronicznej. Praca maszyny z momentem przekraczającym nominalną jest możliwa tylko na krótko, w przeciwnym razie żywotność maszyny zostanie zmniejszona z powodu przegrzania.
W wyniku wzajemnego oddziaływania wirującego strumienia magnetycznego z prądami wywołanymi przez niego w przewodach uzwojenia wirnika, siły działają na te przewodniki w kierunku stycznym. Znajdź wartość momentu utworzonego przez te siły na wale maszyny.
Moc elektromagnetyczna przekazywana do wirnika przez wirujące pole magnetyczne jest gładka:
gdzie M uh - moment elektromagnetyczny działając na wirnik.
Zgodnie z równoważnym obwodem jednej fazy maszyny:
Na podstawie tych wyrażeń znajdujemy:
Biorąc pod uwagę aktualny prąd wirnika, EMF, rezystancję indukcyjną otrzymujemy:
Wprowadzamy stałą i zaniedbując moment tarcia, przedstawiamy wyrażenie chwili na wałku w postaci:
Jeżeli strumień magnetyczny F wyraża się weber, prąd I 2 - w amperach moment obrotowy będzie mierzony w Newton metrach (Nm).
Moment obrotowy maszyny zależy od zmiany pod obciążeniem f, I 2 i, ale może być reprezentowany jako funkcja jednej zmiennej. Jako taka zmienna dla silnika asynchronicznego najwygodniej wybrać poślizg s.
Zgodnie z wcześniej zbadanymi wzorami:
Zakładając, że częstotliwość sieci pozostaje niezmieniona, wprowadzamy
36. Metody regulacji częstotliwości obrotu piekła za pomocą zwarcia. wirnik
37. Rozpoczęcie i regulacja częstotliwości rotacji ciśnienia krwi za pomocą f.r.
Regulacja poprzez zmianę poślizgu odbywa się poprzez zmianę rezystancji R p regulacyjnego nastawnika w obwodzie wirnika.
Wprowadzenie reostatu do obwodu wirnika zmienia zależność momentu M na poślizgu s, bez wpływu na wielkość maksymalnego momentu. Trzy charakterystyki M (s): naturalna (bestorostatnaya) charakterystyka 1 odpowiada zwartemu uzwojeniu wirnika (rezystor rezystancyjny = 0), charakterystyce reostatycznej (sztucznej) 2 i 3 - wprowadzono jeden i dwa stopnie reostatu.
Wprowadzenie rezystora w obwodzie wirnika ma pozytywny wpływ na prąd rozruchowy, zmniejszając go o około 2 razy w porównaniu ze zwarciem ciśnienia krwi.
Wady tej metody: 1) niska wydajność ze względu na straty w reostacie R p; 2) zmniejszenie sztywności charakterystyk mechanicznych; 3) prędkość obrotową można regulować tylko w dół.
Uruchamianie silnika asynchronicznego z wirnikiem fazowym.Uruchomienie silników asynchronicznych znacznie różni się od warunków normalnej pracy. Moment obrotowy silnika przy uruchomieniu musi przekraczać moment oporu ładunku, rolę odgrywa początkowy moment obrotowy. Drugą ważną cechą początkową jest prąd rozruchowy. Częstotliwość prądu rozruchowego dla silników z rotor klatkowy osiąga 5-7, co może być niedopuszczalne dla silnika lub sieci i może mieć gładką wartość początkową. Silnik jest uruchamiany z wirnikiem fazowym za pośrednictwem rezystora 3-fazowego, którego każda faza jest połączona przez szczotki i pierścienie w jedną z faz wirnika. Na początku startu, reostat jest całkowicie włożony, pod koniec startu jest wyprowadzany i wszystkie trzy fazy wirnika są zwarte. Liczba kroków reostatu wynosi więcej niż dwa, a proces przełączania przy uruchomieniu jest zwykle zautomatyzowany. Wprowadzenie aktywnych rezystancji w obwodzie wirnika fazowego zwiększa moment i sprawia, że rozruch jest płynny i ogranicza prąd rozruchowy. Ta metoda rozruchu ma wiele zalet, ale ma zastosowanie tylko w przypadku silników z wirnikiem fazowym.
39,40. Urządzenie, zasada działania silnika prąd stały. Sposoby pobudzenia. EMF uzwojenia twornika i momentu elektromagnetycznego Urządzenie i zasada działania silnika prądu stałego Silnik prądu stałego składa się ze stacjonarnej części wyłącznika i części wirującej - kotwy oddzielonej szczeliną powietrzną. Główne słupy są przymocowane do wewnętrznej powierzchni stojana. Główne bieguny z uzwojeniami wzbudzenia służą do tworzenia głównego strumienia magnetycznego F w maszynie, a dodatkowe bieguny - w celu zmniejszenia iskrzenia.
Kotwica składa się z trzonu, rdzenia, uzwojenia i kolektora. Kolektor zawiera izolowane od siebie miedziane płytki, które są połączone z sekcjami uzwojenia twornika. Naprawiono szczotki są stosowane do kolektora; połączenie uzwojenia twornika z zewnętrznym obwodem elektrycznym. W wyniku oddziaływania prądu twornika I i strumienia magnetycznego F powstaje moment, M = Sffia, gdzie Cm jest stałą momentu zależną od danych konstrukcyjnych maszyny. Moment obrotowy M, silnik jest zrównoważony momentem pracy maszyny roboczej MS. Kiedy twornik obraca się z częstotliwością n, jego uzwojenie przecina strumień magnetyczny F, aw nim, zgodnie z prawem indukcji elektromagnetycznej, indukowany jest przeciw-emf E = SeFp, gdzie Ce jest stałą konstrukcyjną.
Napięcie na tworniku U twornika jest równe sumie EMF i spadkowi napięcia na rezystancji obwodu twornika U = E + RяIя = CeFn, skąd prąd twornika Iya = (U-CeFn) / Rya, a prędkość obrotowa n = (U-RyaI) / CeF /
W zależności od sposobu zasilania uzwojeń wzbudzających generatory prądu stałego są:
| a) b) c) d) |
Ryc. 50. Pobudzanie generatora: a - niezależne, b - równoległe, c - sekwencyjne, d - mieszane.
Przy niezależnym wzbudzeniu OM jest zasilany z zewnętrznego źródła. Jest stosowany w przypadkach, gdy konieczne jest regulowanie prądu wzbudzenia Ib w szerokim zakresie i napięcia U na zaciskach maszyny. Prąd armatury równy bieżącemu obciążenie I I = I n (ryc. 50, a)
Generatory z samo-wzbudzeniem są OV, zasilane przez sam generator.
Włączając OV równolegle z uzwojeniem twornika, mamy generator z równoległym wzbudzeniem (rys. 50, b), w którym I I = I n + I c. W przypadku maszyn o normalnej mocy zazwyczaj osiąga 1-3%, a dla małych maszyn do kilkudziesięciu% prądu twornika. W generatorze z sekwencyjnym pobudzeniem (rys. 50, c), AFP jest połączony szeregowo z kotwicą, tj.
I I = I n = I wiek
Generatory z mieszane podniecenie mają dwa uzwojenia wzbudzenia, OM jest połączony równolegle ze zworą, a drugi ORP sekwencyjnie (Rys. 50, d). Podstawową jest zwykle OB. ORP magnesuje maszynę, gdy wzrasta prąd obciążenia, co kompensuje spadek napięcia U w uzwojeniu twornika i efekt demagnetyzacji reakcji twornika.
Działanie pole magnetyczne na turę z prądem pozwala użyć go do określenia moduł indukcji magnetycznej. Obracanie cewki w polu magnetycznym oznacza, że działają na nią co najmniej dwie siły. Wynik tych sił zostanie zastosowany w punktach A i B (ryc. 6.8). Moment obrotowydziałanie na cewce będzie równe iloczynowi jednej z tych sił. F̅ na promieniu skrętu r. Ten moment nie musi się liczyć. Można go zmierzyć za pomocą sprężyny śrubowej lub innego wrażliwego urządzenia do pomiaru momentu mechanicznego, podłączonego do cewki.
Eksperymenty pokazują, że cewka z prądem w polu magnetycznym zawsze się obraca, więc jej kierunek jest normalny. n̅ zbiega się z kierunkiem indukcji magnetycznej badanego pola B̅. Oczywiście w tym przypadku moment obrotowy będzie wynosił zero. Będzie mieć maksymalną wartość, gdy kąt między indukcją magnetyczną B̅i normalny n̅ będzie równy 90 °.
Indukcja magnetyczna może być określona przez działanie siły pola magnetycznego na prąd z prądem.
Nie zmieniając aktualnej siły w przewodniku, badamy, w jaki sposób zależy wartość maksymalny moment obrotowy z parametrów cewki.
Pozycjonowanie cewki w pewnej odległości od przewodu za pomocą prądu, zmierzyć maksymalny moment obrotowy M maks dla pewnej wartości prądu w cewce I 1. Zwiększ dwukrotnie prąd w cewce. Dzięki I 2 = 2I 1 maksymalny moment mechaniczny będzie równy M maks. 2 = 2M maks. 1. Będziemy obserwować to samo ze wzrostem natężenia prądu 3, 4, 5 razy. Tak więc maksymalna wartość momentu obrotowegoktóry działa na bieżącej pętli, będzie proporcjonalny do siły prądu z kolei
M maks ~I Vit.
Moment obrotowy działając na cewkę w polu magnetycznym jest proporcjonalna do natężenia prądu w niej. Materiał ze strony
Jeśli wymienimy tę cewkę na inną, o większym lub mniejszym obszarze S vit, następnie zauważamy odpowiedni wzrost lub spadek wartości maksymalnego momentu obrotowego. Tak więc
maksymalny moment obrotowy , który działa na cewce w polu magnetycznym, jest proporcjonalny do jej powierzchni:
M maks ~S Vit.
Łącząc wyniki obu etapów badania, otrzymujemy
M maks ~I Vit.S Vit.
Ta strona zawiera materiały dotyczące tematów:
Napięcie U 1 zastosowane do fazy uzwojenia stojana, jest równoważony przez główny EMF E 1, EMF rozproszenia i spadek napięcia na aktywnej rezystancji uzwojenia stojana:
W uzwojeniu wirnika podobne równanie będzie:
Ale ponieważ uzwojenie wirnika jest zamknięte, napięcie U2 = 0, a jeśli weźmiemy pod uwagę, że E 2s = SE 2 i x 2s = Sx 2, to równanie można przepisać w postaci:
![]()
Równanie prądu silnika indukcyjnego powtarza analogiczne równanie transformatora:
Moment obrotowy w silniku asynchronicznym powstaje w wyniku oddziaływania prądu wirnika z polem magnetycznym maszyny. Moment obrotowy może być matematycznie wyrażony przez moc elektromagnetyczną maszyny:
gdzie w 1 = 2png 1 /60 - kątowa częstotliwość obrotu pola. Z kolei n 1 = f 1 60 / Rnastępnie
![]()
Zastępujemy w formule M 1 wyrażenie R uh= P e2/ S i dzieląc przez 9,81, otrzymujemy:
![]()
Wynika z tego, że moment obrotowy silnika jest proporcjonalny do straty elektryczne w wirniku. Zastąp w ostatniej formule wartość prądu Ja 2 ’ :
uzyskać równanie momentu obrotowego silnika asynchronicznego:
gdzie U 1 - napięcie fazowe uzwojenia stojana.
29 . Charakterystyka mechaniczna silnika nazywane jest zależnością prędkości wirnika od momentu obrotowego wału n = f (M2). Ponieważ pod obciążeniem moment biegu jałowego jest mały, M2 ≈ M i charakterystyka mechaniczna jest reprezentowana przez zależność n = f (M). Jeśli weźmiemy pod uwagę zależność s = (n1 - n) / n1, wówczas charakterystyka mechaniczna może zostać uzyskana poprzez przedstawienie zależności graficznej we współrzędnych n i M (ryc. 1).
Ryc. 1. Charakterystyka mechaniczna silnika asynchronicznego
Naturalna mechaniczna charakterystyka silnika asynchronicznego odpowiada głównemu (paszportowemu) schematowi włączenia i nominalnym parametrom napięcia zasilania. Sztuczne cechysą uzyskiwane, jeśli uwzględnione są jakiekolwiek dodatkowe elementy: rezystory, reaktory, kondensatory. Gdy silnik jest zasilany napięciem nie znamionowym, charakterystyka różni się również od naturalnej charakterystyki mechanicznej.
Charakterystyka mechaniczna jest bardzo wygodnym i użytecznym narzędziem w analizie trybów statycznych i dynamicznych napędu elektrycznego.
30 Charakterystyka mechaniczna i samoregulacja silnika. Wykres łączący wielkości mechaniczne - prędkość i moment obrotowy - nazywany jest charakterystyką mechaniczną silnika indukcyjnego (ryc. 7) n = ƒ (M). Samoregulacja silnika asynchronicznego jest następująca. Pozwól silnikowi pracować stabilnie w pewnym trybie, rozwijając prędkość n1 i moment M1. Przy równomiernym obrocie ten moment jest równy momentowi hamowania M p1tj. M1 = M t1, n1 = сonset. Zwiększenie momentu hamowania do M2 spowoduje zmniejszenie obrotów samochodu, ponieważ moment hamowania będzie większy moment obrotowy. Wraz ze spadkiem obrotów, poślizg wzrasta, co z kolei powoduje wzrost siły elektromotorycznej i prądu w wirniku. Zwiększa to moment obrotowy silnika. Proces ten kończy się, gdy moment obrotowy M2 opracowany przez silnik staje się równy M t2. W tym samym czasie prędkość obrotowa jest mniejsza niż n1. Właściwość automatycznej równowagi między hamowaniem a momentem obrotowym jest nazywana samoregulacja.
Na stanowisku laboratoryjnym silnik jest obciążony hamulcem elektrycznym składającym się z elektromagnesu, w szczelinie której obraca się tarcza, która jest zamontowana na wale silnika. Zmieniając napięcie autotransformatora, zasilając cewkę elektromagnesu, można zmienić siłę hamowania, której moment wynosi: M TORM = F r (N · m)
gdzie F jest siłą (siłą) działającą na obwód koła pasowego, (H);
r jest promieniem koła równym 0,18 m. Moc netto na wale silnika:
gdzie n - prędkość obrotowa silnika, obr / min.
gdzie ƒ jest częstotliwością sieci (równą 50 Hz),
str - liczba par biegunów uzwojenia stojana (równa 2).
n 1 - prędkość synchroniczna wirującego pola magnetycznego.
Prędkość obrotowa silnika określana jest za pomocą obrotomierza. Poślizg obliczony według wzoru:
31 Wydajność nazywana jest zależnością mocy pobieranej przez silnik, zużytym prądem I, współczynnikiem mocy, prędkością silnika, współczynnikiem wydajności i momentem obrotowym M od mocy netto silnika podawanej do wału. Charakterystyki działania określają podstawowe właściwości eksploatacyjne silnika asynchronicznego. Wydajność asynchronicznego silnika mocy średniej pokazano na rys. 8.8. Ich zachowanie wyjaśniono w następujący sposób. Przy niskich obciążeniach prąd pobierany przez silnik (prąd jałowy) może wynosić od 20 do 70% prądu znamionowego. Przy rosnącym obciążeniu wzrasta prąd w obwodzie wirnika, co prowadzi do prawie proporcjonalnego wzrostu prądu Ja w obwodzie stojana.
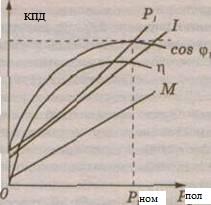
Rys.8.8 Moment obrotowy silnika () jest on również prawie proporcjonalny do obciążenia, ale przy dużych obciążeniach liniowość wykresu jest nieco zaburzona przez zmniejszenie prędkości obrotowej silnika. Charakterystyka wydajności wyraża zależność między mocą silnika a przesunięciem fazowym między napięciem prądu i stojana. Silnik asynchroniczny, podobnie jak transformator, pobiera prąd I z sieci, który znacznie opóźnia się w fazie od przyłożonego napięcia. Na przykład w trybie bezczynności. Przy rosnącym obciążeniu wału silnika zwiększają się aktywne składniki prądu wirnika i stojana . Maksymalna wartość osiąga przy .
Przy dalszym zwiększeniu wartość nieznacznie się zmniejszy. Jest to spowodowane wzrostem poślizgu s, który powoduje wzrost reaktancji uzwojenia wirnika, aw konsekwencji przesunięcie fazowe . Dzięki powiększenie zwiększa się i np. zmniejszy się.
Zachowanie charakterystyki roboczej wyjaśniono w następujący sposób. Wielkość wydajności jest określona przez stosunek mocy netto zużytej z sieci.
Wartość nazywa się utratą mocy. Oprócz strat w stali stojana i wirnika do odwrócenia namagnesowania i prądów wirowych, które wraz ze stratami mechanicznymi można uznać za trwałe, występują straty miedzi w silniku asynchronicznym ,
tj. w uzwojeniach stojana i wirnika, które są proporcjonalne do kwadratu prądu płynącego, a zatem zależą od obciążenia. Podczas pracy na biegu jałowym, jak w transformatorze, przeważają straty stali, ponieważ jest ona równa prądowi jałowemu, który jest mały. Przy niewielkich obciążeniach na wale straty miedzi nadal pozostają małe, a zatem wydajność określona wzorem ![]() (8.5)
(8.5)
wraz ze wzrostem najpierw dramatycznie wzrasta. Kiedy stałe straty stają się równe stratom zależnym od obciążenia , wydajność osiąga maksymalną wartość. Wraz z dalszym wzrostem obciążenia, zmienna strata mocy znacznie wzrasta, co powoduje współczynnik wydajności. znacznie zmniejszone. Charakter uzależnienia ) można wyjaśnić na podstawie relacji . Mieliśmy wydajność był stały, wtedy istniałaby liniowa zależność między nimi. Ale od wydajności zależy od tego i ta zależność początkowo gwałtownie wzrasta, a wraz z dalszym wzrostem obciążenia zmienia się nieznacznie, to krzywa ) najpierw rośnie powoli, a następnie gwałtownie rośnie.
32 W każdym obwód elektryczny suma mocy wszystkich źródeł energii elektrycznej musi być równa sumie mocy wszystkich odbiorników i elementów pomocniczych. Po uzyskaniu wcześniejszych wyrażeń mocy, możemy napisać w formie ogólnej równanie bilansu mocy dla dowolnego obwodu elektrycznego:
Σ E → Ja → + Σ U ← Ja → = Σ E ← Ja → + Σ U → Ja → + Σ Ja 2 r.
Równanie (1.35) można zapisać zarówno dla rzeczywistych kierunków pola elektromagnetycznego, napięć i prądów, jak i dla przypadku, gdy niektóre z nich są dowolnie wybieranymi kierunkami pozytywnymi. W pierwszym przypadku wszystkie jego elementy będą dodatnie, a odpowiednie elementy obwodu będą faktycznie źródłami lub odbiornikami energii elektrycznej. Jeżeli niektórzy członkowie są zapisywani z arbitralnie wybranymi kierunkami pozytywnymi, odpowiednie elementy powinny być uważane za zamierzone źródła i odbiorniki. W wyniku obliczeń lub analiz niektóre z nich mogą okazać się negatywne. Będzie to oznaczać, że jedno z rzekomych źródeł jest w rzeczywistości odbiornikiem, a niektóre z zamierzonych odbiorników są źródłem.
33 Uruchamianie silnika asynchronicznego towarzyszy proces przejścia maszyny związany z przejściem wirnika ze stanu spoczynku do stanu równomiernego obrotu, w którym moment obrotowy silnika równoważy moment sił oporu na wale maszyny. Kiedy uruchamiany jest silnik indukcyjny, następuje zwiększone zużycie energii elektrycznej z sieci zasilającej, która jest zużywana nie tylko na pokonanie momentu hamującego przyłożonego do wału i pokrycie strat w samym silniku indukcyjnym, ale również na wysyłanie pewnej energii kinetycznej do ruchomych ogniw jednostki produkcyjnej. Dlatego przy uruchamianiu silnika indukcyjnego musi rozwinąć się zwiększony moment obrotowy. Dla silnik asynchroniczny z wirnikiem fazowym początkowy moment rozruchowy odpowiadający poślizgowi sp = 1 zależy od aktywnych rezystancji nastawnych rezystorów wprowadzonych do obwodu wirnika.
Ryc. 1. Uruchomienie trójfazowego silnika asynchronicznego z wirnikiem fazowym: a - wykresy momentu obrotowego silnika z wirnikiem fazowym na poślizgu przy różnych rezystancjach czynnych rezystorów w obwodzie wirnika, b - schemat elektryczny rezystorów i styki zamknięcia przyspieszenia w obwodzie wirnika. Tak więc, gdy styki przyspieszenia są zamknięte, U1, U2, tj. Gdy silnik indukcyjny jest uruchamiany ze zwartymi pierścieniami kontaktowymi, początkowy moment rozruchowy Mnl = (0,5 -1,0) Mn, a początkowy prąd początkowy In = (4,5 - 7) Jeden i więcej. Mały początkowy moment obrotowy asynchroniczny silnik elektryczny z wirnikiem fazowym może być niewystarczający do uruchomienia jednostki produkcyjnej i jej późniejszego przyspieszenia, a znaczny prąd rozruchowy spowoduje zwiększone ogrzewanie uzwojenia silnika, co ogranicza częstotliwość jego włączania, a w sieciach niskiego napięcia prowadzi do chwilowego spadku napięcia, co jest niepożądane dla innych odbiorników do pracy. Okoliczności te mogą być przyczyną, z wyjątkiem zastosowania silników asynchronicznych z wirnikiem fazowym o dużym prądzie rozruchowym do napędzania mechanizmów roboczych. Wprowadzenie do obwodu wirnika regulowanych rezystorów silnika, zwane uruchamianiem, nie tylko zmniejsza początkowy prąd rozruchowy, ale także zwiększa początkowy moment rozruchowy, który może osiągnąć maksymalny moment obrotowy Mmax (rys. 1, a, krzywa 3), jeśli krytyczny silnik poślizgu z wirnikiem fazowym scr = (R2 "+ Rd") / (X1 + X2 ") = 1, gdzie Rd" jest aktywną rezystancją rezystora w fazie uzwojenia wirnika silnika, zredukowaną do fazy uzwojenia stojana. Dalszy wzrost rezystancji czynnej wyjściowego rezystora jest niecelowy, ponieważ prowadzi do osłabienia początkowego momentu rozruchowego i punktu maksymalnego momentu w obszarze ślizgowym s\u003e 1, co eliminuje możliwość przyspieszenia wirnika. Wymagana rezystancja rezystorów do uruchomienia silnika z wirnikiem fazowym jest określana na podstawie wymagań początku, co może być łatwe, gdy Mn = (0,1 - 0,4) Mn, normalnie, jeśli Mn - (0,5 - 0,75) Mn i ciężkie z Mn ≥ Mn. Aby utrzymać wystarczająco duży moment obrotowy przy silniku z wirnikiem fazowym podczas przyspieszania jednostki produkcyjnej w celu skrócenia czasu trwania procesu przejściowego i zmniejszenia ogrzewania silnika, konieczne jest stopniowe zmniejszanie rezystancji wyjściowych rezystorów. Dopuszczalna zmiana momentu w procesie przyspieszania M (t) jest określona przez warunki elektryczne i mechaniczne, ograniczając szczytową granicę momentu M\u003e 0,85 Mmax, moment przełączania M2 \u003e\u003e MS (ryc. 2), a także przyspieszenie.
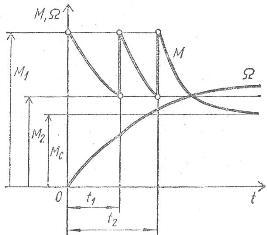
Ryc. 2 Charakterystyka wyjściowa trójfazowy silnik asynchroniczny z wirnikiem fazowym. Przełączanie wyjściowych rezystorów odbywa się przez naprzemienne włączanie styczników przyspieszenia Y1, Y2 odpowiednio w czasie t1, t2 liczonym od momentu uruchomienia silnika, kiedy podczas przyspieszania moment M staje się równy momentowi przełączania M2. Z tego względu podczas całego rozruchu wszystkie momenty szczytowe są takie same i wszystkie punkty przełączania są sobie równe. Ponieważ moment obrotowy i prąd silnika asynchronicznego z wirnikiem fazowym są wzajemnie połączone, możliwe jest ustawienie granicy prądu szczytowego I1 = (1,5 - 2,5) In i prądu przełączania I2, który powinien zapewnić moment przełączania М2\u003e Мc. Odłączenie silników asynchronicznych z wirnikiem fazowym od sieci zawsze odbywa się, gdy obwód wirnika jest zwarty, aby uniknąć przepięć w fazach uzwojenia stojana, które mogą przekroczyć napięcie znamionowe tych faz 3-4 razy, jeśli obwód wirnika jest otwarty.
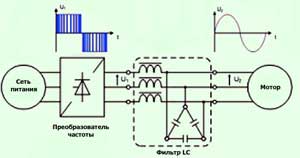
34 Regulacja częstotliwości. Ta metoda sterowania prędkością obrotową pozwala na zastosowanie najbardziej niezawodnych i tanich silników asynchronicznych z wirnikiem klatkowym. Jednak, aby zmienić częstotliwość napięcia zasilania, wymagane jest źródło elektryczne o zmiennej częstotliwości. Jako te ostatnie wykorzystują one generatory synchroniczne o zmiennej częstotliwości obrotu lub przetwornice częstotliwości - elektryczne lub statyczne, wykonane na kontrolowanych bramkach półprzewodnikowych (tyrystorach). Obecnie przetwornice częstotliwości mają dość skomplikowany obwód i stosunkowo wysokie koszty. Jednak szybki rozwój technologii półprzewodnikowych mocy pozwala nam mieć nadzieję na dalszą poprawę częstotliwości przetwornic, co otwiera perspektywy szerokiego zastosowania regulacji częstotliwości. Szczegółowy opis regulacji dotyczących regulacji częstotliwości i analizy działania silnika indukcyjnego zasilanego z przetwornicy częstotliwości podano w § 4.13 i 4.14. Regulacja poprzez zmianę liczby biegunów. Taka regulacja pozwala uzyskać skokową zmianę prędkości obrotowej. Na rys. Pokazano 4.35 najprostszy schemat (dla jednej fazy), umożliwiając dwukrotną zmianę liczby biegunów uzwojenia stojana. Aby to zrobić, każda faza uzwojenia stojana jest podzielona na dwie części, które są przełączane z połączenia szeregowego na równoległe. Z rysunku jest jasne, że gdy cewki 1-2 i 3-4 są włączone w dwóch równoległych gałęziach, liczba biegunów zmniejsza się dwa razy, a w konsekwencji częstotliwość obrotu pola magnetycznego wzrasta dwukrotnie.Podczas przełączania liczba kolejnych zwojów w każdej fazie jest o połowę mniejsza, ale ponieważ prędkość obrotowa się podwaja, emf indukowany w fazie pozostaje niezmieniony. Dlatego też silnik przy obu prędkościach może być podłączony do sieci z tym samym napięciem. Aby nie przełączać uzwojenia wirnika, wykonuje się to drugie zwarte. Jeśli konieczne jest posiadanie trzech lub czterech częstotliwości obrotowych, wówczas jedno dodatkowe uzwojenie umieszcza się na stojanie, przełączając, co daje dodatkowe dwie częstotliwości. Wywoływane są silniki asynchroniczne z pewną liczbą biegunów wiele prędkości. Regulacja poprzez włączenie reostatu do obwodu wirnika. Gdy dodatkowe obwody aktywne są zawarte w obwodzie wirnika R Add1, R ext2, R add3 i inni zmieniają formę zależności M = f (s) i właściwości mechaniczne n 2 = f (M) silnik (ryc. 4.37, a). W tym przypadku jakiś moment obciążenia M n pasujący poślizg s 1 s 2 s 3 , ..., większy niż poślizg s e, gdy silnik pracuje z naturalną charakterystyką (z R ext = 0). Dlatego prędkość silnika w stanie ustalonym spada z n e do n 1 n 2 , n 3 , ... (rys. 4.37, b). Ta metoda sterowania może być stosowana tylko w przypadku silnika z wirnikiem fazowym. Umożliwia płynną zmianę częstotliwości obrotu w szerokim zakresie. Jego wadami są: a) duże straty energii w regulacyjnym oporniku; b) nadmiernie "miękka" charakterystyka mechaniczna silnika o wysokiej rezystancji w obwodzie wirnika. W niektórych przypadkach jest to niedopuszczalne, ponieważ niewielka zmiana momentu obciążenia odpowiada znaczącej zmianie prędkości.
35 Generator asynchroniczny - Jest to asynchroniczna maszyna elektryczna pracująca w trybie generatora (silnik el.). Za pomocą silnika napędowego (w naszym przypadku silnika zaburtowego) wirnik asynchronicznego generatora elektrycznego obraca się w tym samym kierunku co pole magnetyczne. Poślizg wirnika staje się ujemny, na wale maszyny asynchronicznej pojawia się moment hamowania, a generator przesyła energię do sieci. Ekscytować siła elektromotoryczna magnetyzacja szczątkowa wirnika jest wykorzystywana w obwodzie wyjściowym. W tym celu stosuje się kondensatory. Generatory asynchroniczne nie są podatne na zwarcia. Generator asynchroniczny jest prostszy niż generator synchroniczny (na przykład generator samochodowy): jeśli te ostatnie mają cewki indukcyjne umieszczone na wirniku, to wirnik generatora asynchronicznego jest podobny do zwykłego koła zamachowego. Taki generator jest lepiej zabezpieczony przed brudem i wilgocią, jest bardziej odporny na zwarcia i przeciążenia, a napięcie wyjściowe asynchronicznego generatora elektrycznego ma mniejszy stopień zniekształceń nieliniowych. Pozwala to na użycie generatorów asynchronicznych nie tylko do zasilania urządzeń przemysłowych, które nie są krytyczne dla postaci napięcia wejściowego, ale do podłączenia sprzętu elektronicznego. Jest to asynchroniczny generator elektryczny, który jest idealnym źródłem prądu dla urządzeń o obciążeniu czynnym (omowym): grzejniki elektryczne, konwertery spawalnicze, żarówki żarowe, urządzenia elektroniczne, inżynieria komputerowa i radiowa. Zalety asynchronicznego generatora . Zalety te obejmują niski współczynnik ClearFactor (współczynnik harmoniczny), który charakteryzuje ilościową obecność wyższych harmonicznych w napięciu wyjściowym generatora. Wyższe harmoniczne powodują nierównomierny obrót i bezużyteczne nagrzewanie silników elektrycznych. W generatorach synchronicznych wartość współczynnika wyraźnego może wynosić do 15%, podczas gdy współczynnik czystego asynchronicznego generatora elektrycznego nie przekracza 2%. W ten sposób generator asynchroniczny generuje praktycznie tylko użyteczną energię. Inną zaletą asynchronicznego generatora elektrycznego jest to, że całkowicie eliminuje on wirujące uzwojenia i komponenty elektroniczne, które są wrażliwe na wpływy zewnętrzne i często są podatne na uszkodzenia. Dlatego generator asynchroniczny nie jest bardzo podatny na zużycie i może trwać bardzo długo. Na wyjściu naszych generatorów znajduje się natychmiast 220/380 V prądu przemiennego, które mogą być używane bezpośrednio do urządzeń gospodarstwa domowego (takich jak grzejniki), do ładowania akumulatorów, do łączenia z ławą z piłą mechaniczną, a także do pracy równolegle z tradycyjną siecią. W takim przypadku zapłacisz różnicę zużytą przez sieć i wygenerowaną przez wiatrak. Od napięcie od razu idzie w parze z parametrami przemysłowymi, wtedy nie potrzebujesz różnych konwerterów (falowników) z bezpośrednim włączeniem generatora wiatrowego do twojego ładunku. Na przykład możesz bezpośrednio połączyć się z ławką piły mechanicznej i, jeśli jest wiatr, pracować tak, jakbyś właśnie podłączona do sieci 380V. Jak wiadomo, mechaniczne hamulce są często stosowane w celu skrócenia czasu hamowania przy zatrzymywaniu maszyn produkcyjnych i mechanizmów. Skrócenie czasu hamowania, szczególnie w przypadku krótkiego cyklu pracy, prowadzi do znacznego wzrostu wydajności maszyn i mechanizmów. Wadami mechanicznych hamulców są: szybkie zużycie powierzchni trących, złożoność i konieczność okresowej regulacji siły hamowania, potrzeba dodatkowej przestrzeni, aby pomieścić hamulec i jego połączenie z mechanizmem. Wszystkie powyższe wady są wyeliminowane, jeżeli, dla powyższych celów, zamiast mechanicznego hamulca, właściwości silników elektrycznych są wykorzystywane do działania w trybach hamowania, tj. Działają one zasadniczo jako generator i rozwijają moment obrotowy, który nie obraca się, ale hamuje. W wielu maszynach podnoszących i transportujących (dźwigi, windy, schody ruchome itp.), Gdzie możliwy jest ruch pod działaniem siły ciężkości, zapewniona jest stała, stała prędkość opuszczania ładunków za pomocą momentu hamującego silnika elektrycznego. Silniki prądu stałego mogą działać w trzech trybach hamowania:
W trybie opozycji;
W trybie generatora z powrotem energii do sieci;
W trybie hamowanie dynamiczne.
W każdym z trybów hamowania silnik elektryczny działa jako generator, zamienia na przykład energię kinetyczną ruchomych części lub energię potencjalną z malejącego obciążenia na energię elektryczną.
36 Podczas cofania silnika w ruchu za pomocą przełącznika nożowego następuje pierwsze zwalnianie z tej prędkości do zera, a następnie przyspieszenie w innym kierunku. Takie hamowanie może być również stosowane do hamowania z tzw opozycja. Przy takim odwróceniu lub hamowaniu silnika asynchronicznego z wirnikiem klatkowym występują znaczne prądy. Dlatego też, w oparciu o warunki ogrzewania dla tych silników, liczba nawrotów na godzinę wynosi nie więcej niż kilkadziesiąt. Aby ograniczyć prądy i zwiększyć momenty obrotowe, rezystancja jest wprowadzana do obwodu wirnika fazowego silnika indukcyjnego. Rozważ trzy główne sposoby hamowania elektrycznego silników asynchronicznych. Hamowanie metody sprzeciwu, jak wspomniano, produkowane przy zmianie silnika w podróży. Jednocześnie pole magnetyczne obraca się w drugim kierunku względem kierunku obrotów silnika, a moment obrotowy silnika hamuje - działa wbrew kierunkowi obrotu. Hamowanie generatora występuje podczas przełączania silnika wielobiegowego w ruchu z wyższej prędkości na niższą prędkość, tj. przy zmianie maszyny z mniejszej liczby biegunów na większą. W pierwszym momencie przełączania prędkość obrotowa silnika jest znacznie wyższa niż prędkość jego pola, tzn. Poślizg jest ujemny, a maszyna przechodzi w tryb pracy generatora. Hamowanie występuje przy konwersji energii kinetycznej wirujących części na energia elektryczna, która minus straty w samochodzie jest przekazywana do sieci. Hamowanie generatora może również znajdować się w podnośniku, gdy zejdzie ciężki ładunek, przyspieszając silnik do prędkości przekraczającej synchroniczną; wtedy maszyna zaczyna przekazywać sieci energię przekazaną mu przez malejący ładunek. Hamowanie w trybie pracy przez generator jest możliwe tylko przy super-synchronicznej prędkości. Jeżeli silnik musi zostać zatrzymany po zakończeniu hamowania, to po zakończeniu hamowania należy przełączyć na hamowanie mechaniczne lub inny rodzaj prądu elektrycznego (dynamiczny, przeciwzwarciowy). Ustalenie pozycji na końcu, jeśli to konieczne, odbywa się tylko za pomocą mechanicznego hamulca. Dzięki hamowanie dynamiczne uzwojenie stojana silnika jest odłączone sieć trójfazowa i jest zawarty w sieci stałych lub jednofazowych prądów przemiennych. W tym przypadku istnieją różne sposoby łączenia faz uzwojenia stojana. Uzwojenie stojana, zasilane prądem stałym, wytwarza stacjonarne pole magnetyczne. Podobnie jak podczas normalnej pracy silnika, jego wirujące pole ciągnie za nim wirnik, a nieruchome pole podczas dynamicznego hamowania powoduje szybkie zatrzymanie wirnika. Energia kinetyczna wirujących części przechodzi w ciepło wytwarzane w obwodzie wirnika ze względu na prądy indukowane w nim przez stacjonarne pole stojana. Gładkość hamowania jest zapewniona poprzez regulację napięcia na zaciskach stojana, moment hamowania silnika z wirnikiem fazowym może być również regulowany przez reostat w obwodzie wirnika. Wadą hamowania dynamicznego jest zapotrzebowanie na źródło prądu stałego o niskim napięciu.
37 Maszyna synchroniczna - jest elektryczną maszyną prądu przemiennego, której prędkość wirnika jest równa częstotliwości obrotu pola magnetycznego w szczelinie powietrznej. Głównymi częściami maszyny synchronicznej są kotwica i induktor. Najczęstszym wykonaniem jest takie, w którym kotwica znajduje się na stojanie, a cewka znajduje się na wirniku oddzielonym od niej wirnikiem szczeliny powietrznej. Kotwica to jedno lub więcej uzwojeń AC. W silnikach prądy zastosowane do twornika wytwarzają wirujące pole magnetyczne, które łączy się z polem induktora, a zatem energia jest przekształcana. Pole armatury wpływa na pole induktora i dlatego jest również wywoływane pole reakcji kotwicy. W generatorach tworzone jest pole reakcji kotwicy prądy przemienneindukowane w uzwojeniu twornika od induktora. Induktor składa się z tyczek - elektromagnesów stałego prądu lub magnesów stałych (w mikromaszynach). Induktory maszyn synchronicznych mają dwa różne wzory: wyraźny biegun lub niejawny biegun. Maszyna o czystym biegu jest inna, ponieważ bieguny są wyraźne i mają strukturę podobną do biegunów maszyny prądu stałego. Przy niejawnej konstrukcji biegunowej uzwojenie wzbudzenia pasuje do szczelin rdzenia induktora, bardzo podobne do uzwojenia wirników maszyny indukcyjnej z wirnikiem fazowym, z tą różnicą, że między biegunami pozostaje przestrzeń, niewypełniona przewodami (tzw. wielki ząb). Konstrukcje z pobocznicą są stosowane w maszynach o dużej prędkości w celu zmniejszenia naprężeń mechanicznych na słupach. Aby zmniejszyć opór magnetyczny, czyli poprawić przepływ strumienia magnetycznego, należy użyć rdzeni ferromagnetycznych wirnika i stojana. Zasadniczo są to laminowane konstrukcje ze stali elektrotechnicznej (to znaczy rekrutowane z pojedynczych arkuszy). Stal elektryczna ma kilka interesujących właściwości. W szczególności ma wysoką zawartość krzemu w celu zwiększenia jego oporu elektrycznego, a tym samym zmniejszenia prądów wirowych.