Klasyfikacja właściwości mechanicznych.
Ryc. 1-1. Struktura napędu
Zasilany elektrycznie nazywany maszyną, która wykonuje konwersję moc elektryczna w mechanice i dostarczaniu sterowanie elektryczne przekształcona energia mechaniczna.
Napęd składa się z dwóch głównych części:
1) jednostkę napędową zawierającą silnik elektryczny i urządzenie do przesyłania energii mechanicznej do członu roboczego;
2) układy sterowania zawierające narządy sterujące, urządzenia do wytwarzania właściwości napędu elektrycznego i wyposażenia ochronnego.
Główną funkcją napędu elektrycznego jest uruchomienie mechanizmu roboczego. Jednak nowoczesny zautomatyzowany napęd elektryczny spełnia szerszą funkcję optymalizacji procesu.
Napędy elektryczne stosowane w produkcji można podzielić na trzy główne typy.
1) Grupowy napęd elektryczny jest napędem, w którym ruch z jednego silnika do jednej lub kilku przekładni jest przekazywany do grupy pracujących maszyn. Taki napęd jest czasami nazywany napędem transmisyjnym.
Ze względu na swoje techniczne niedoskonałości ten typ napędu jest obecnie mało używany i jest interesujący tylko z punktu widzenia historii rozwoju napędu elektrycznego, ponieważ ustąpił miejsca napędowi jednosilnikowemu i wielosilnikowemu.
2) 
 Pojedynczy napęd elektryczny to napęd, który napędza oddzielną maszynę za pomocą jednego silnika elektrycznego. Przykłady zastosowania pojedynczego napędu elektrycznego to wiertarka jednowrzecionowa, liczne elektronarzędzia, a także inne proste maszyny do obróbki metalu i różne proste mechanizmy. W wielu przypadkach napęd jest wykonywany z silnika elektrycznego specjalnego przeznaczenia, strukturalnie reprezentującego jedną całość z samym mechanizmem.
Pojedynczy napęd elektryczny to napęd, który napędza oddzielną maszynę za pomocą jednego silnika elektrycznego. Przykłady zastosowania pojedynczego napędu elektrycznego to wiertarka jednowrzecionowa, liczne elektronarzędzia, a także inne proste maszyny do obróbki metalu i różne proste mechanizmy. W wielu przypadkach napęd jest wykonywany z silnika elektrycznego specjalnego przeznaczenia, strukturalnie reprezentującego jedną całość z samym mechanizmem.
3) Napęd wielosilnikowy to napęd składający się z kilku pojedynczych napędów, z których każdy jest przeznaczony do uruchamiania poszczególnych elementów roboczych jednostki produkcyjnej. Takie napędy elektryczne stosuje się na przykład w złożonych maszynach do obróbki metalu, maszynach papierniczych, walcowniach metalurgicznych i innych urządzeniach maszynowych. Wielosilnikowe napędy elektryczne są coraz częściej stosowane w nowoczesnym przemyśle.
Określa związek między prędkością obrotową a momentem oporu mechanizmu mechaniczna charakterystyka mechanizmu.
Aby uwzględnić właściwości charakterystyk mechanicznych, można użyć uproszczonej formuły, która jest ważna dla większości mechanizmów:
W oparciu o tę formułę można wyróżnić cztery typy cech mechanicznych:
1) przyspieszyć niezależne działanie mechaniczne
![]() ,
,
2) liniowo rosnąca charakterystyka mechaniczna
3) nieliniowo rosnąca charakterystyka (paraboliczna)
Charakterystyka wentylatora,
4) nieliniowo malejąca charakterystyka
Odwrotnie proporcjonalna do prędkości.
Ryc. 1-4. Główne rodzaje charakterystyk mechanicznych.
Charakterystyką mechaniczną silnika elektrycznego jest zależność jego prędkości od momentu obrotowego, tj. .
 Niemal wszystkie silniki elektryczne mają tę właściwość, że ich prędkość jest malejącą funkcją momentu obrotowego silnika. Dotyczy to prawie wszystkich konwencjonalnych silników elektrycznych stosowanych w przemyśle. Jednak stopień zmiany prędkości wraz ze zmianą momentu zmienia się w zależności od silnika i charakteryzuje się tzw sztywnośćich właściwości mechaniczne.
Niemal wszystkie silniki elektryczne mają tę właściwość, że ich prędkość jest malejącą funkcją momentu obrotowego silnika. Dotyczy to prawie wszystkich konwencjonalnych silników elektrycznych stosowanych w przemyśle. Jednak stopień zmiany prędkości wraz ze zmianą momentu zmienia się w zależności od silnika i charakteryzuje się tzw sztywnośćich właściwości mechaniczne.
Charakterystyka mechaniczna Silniki elektryczne można podzielić na trzy główne kategorie:
1. Absolutnie sztywna charakterystyka mechaniczna, przy której prędkość ze zmianą momentu pozostaje niezmieniona. Ta charakterystyka ma silniki synchroniczne (bezpośrednie 1 na rys. 1-5).
 2. Sztywna charakterystyka mechaniczna, przy której prędkość maleje wraz ze zmianą momentu, ale w niewielkim stopniu. Sztywne właściwości mechaniczne mają silniki prąd stały niezależne wzbudzenia, a także silniki asynchroniczne w części roboczej charakterystyki mechanicznej (krzywa 2
na rys. 1-5). W przypadku silnika asynchronicznego stopień sztywności w różnych punktach charakterystyki mechanicznej jest inny (rys. 1-6). Pomiędzy największymi (krytycznymi) wartościami momentów w trybie silnika i generatora, charakterystyka silnika indukcyjnego okazuje się stosunkowo sztywna.
2. Sztywna charakterystyka mechaniczna, przy której prędkość maleje wraz ze zmianą momentu, ale w niewielkim stopniu. Sztywne właściwości mechaniczne mają silniki prąd stały niezależne wzbudzenia, a także silniki asynchroniczne w części roboczej charakterystyki mechanicznej (krzywa 2
na rys. 1-5). W przypadku silnika asynchronicznego stopień sztywności w różnych punktach charakterystyki mechanicznej jest inny (rys. 1-6). Pomiędzy największymi (krytycznymi) wartościami momentów w trybie silnika i generatora, charakterystyka silnika indukcyjnego okazuje się stosunkowo sztywna.

 3. Miękka charakterystyka mechaniczna charakteryzuje się znaczną zmianą prędkości ze zmianą momentu obrotowego. Ta cecha ma silniki o sekwencyjnym wzbudzeniu, zwłaszcza w strefie małych momentów (krzywa 3
na rys. 1-5). W przypadku tych silników stopień sztywności nie jest stały dla wszystkich punktów charakterystycznych. Silniki mieszanego wzbudzenia można przypisać do drugiej lub trzeciej grupy, w zależności od stopnia sztywności charakterystyki mechanicznej.
3. Miękka charakterystyka mechaniczna charakteryzuje się znaczną zmianą prędkości ze zmianą momentu obrotowego. Ta cecha ma silniki o sekwencyjnym wzbudzeniu, zwłaszcza w strefie małych momentów (krzywa 3
na rys. 1-5). W przypadku tych silników stopień sztywności nie jest stały dla wszystkich punktów charakterystycznych. Silniki mieszanego wzbudzenia można przypisać do drugiej lub trzeciej grupy, w zależności od stopnia sztywności charakterystyki mechanicznej.
Ryc. 1-7. Obwód rozruchowy silnika DC
niezależne pobudzenie.
W stanie ustalonym pracy silnika, przyłożone napięcie U jest określane następującym wyrażeniem:
![]() (1.1)
(1.1)
gdzie Jestem - prąd obwodu twornika nazywany jest taką charakterystyką silnika, co uzyskuje się przy braku zewnętrznego oporu w obwodzie twornika wartości nominalne napięcie i strumień magnetyczny.
Jeżeli w obwodzie twornika znajduje się dodatkowy rezystor (reostat), wówczas wywoływane są właściwości mechaniczne uzyskane w tym przypadku sztuczne lub reostat.
Charakterystyki reostatyczne mają znacznie większe nachylenie względem osi momentów niż cecha naturalna, tj. mają mniej sztywności. Im większy opór wprowadzany do obwodu twornika, im bardziej stroma charakterystyka, tym mniejsza sztywność.
Charakterystyka mechaniczna silnika nazywa się zależnością prędkości wirnika od momentu obrotowego wału n = f (M2). Ponieważ pod obciążeniem moment biegu jałowego jest mały, M2 ≈ M i charakterystyka mechaniczna jest reprezentowana przez zależność n = f (M). Jeśli weźmiemy pod uwagę zależność s = (n1 - n) / n1, wówczas charakterystyka mechaniczna może zostać uzyskana poprzez przedstawienie zależności graficznej we współrzędnych n i M (ryc. 1).
Ryc. 1. Charakterystyka mechaniczna silnika asynchronicznego
Naturalna mechaniczna charakterystyka silnika asynchronicznego odpowiada głównemu (paszportowemu) schematowi włączenia i nominalnym parametrom napięcia zasilania. Sztuczne cechysą uzyskiwane, jeśli uwzględnione są jakiekolwiek dodatkowe elementy: rezystory, reaktory, kondensatory. Gdy silnik jest zasilany napięciem nie znamionowym, charakterystyka różni się również od naturalnej charakterystyki mechanicznej.
Charakterystyka mechaniczna jest bardzo wygodnym i użytecznym narzędziem w analizie trybów statycznych i dynamicznych napędu elektrycznego.
Charakterystyka mechaniczna to zależność momentu obrotowego od poślizgu lub, innymi słowy, od liczby obrotów:
![]()
Od wyrażenia  jest oczywiste, że ta zależność jest bardzo skomplikowana, ponieważ, jak pokazują wzory)
jest oczywiste, że ta zależność jest bardzo skomplikowana, ponieważ, jak pokazują wzory)  i
i  szybownictwo jest również zawarte w wyrażeniach dla Ja 2
i cos? 2. Charakterystyka mechaniczna silnika asynchronicznego jest zwykle podana graficznie.
szybownictwo jest również zawarte w wyrażeniach dla Ja 2
i cos? 2. Charakterystyka mechaniczna silnika asynchronicznego jest zwykle podana graficznie.
Punktem wyjścia jest charakterystyka n = 0 i s = 1: jest to pierwsza chwila uruchomienia silnika. Moment rozruchowy M n - Bardzo ważna cecha wydajności silnika. Jeśli M n mały, mniejszy niż znamionowy moment obrotowy, silnik można uruchomić tylko na biegu jałowym lub przy odpowiednio zmniejszonym obciążeniu mechanicznym.
Oznacz symbol M np przeciwstawny (hamujący) moment wytworzony przez mechaniczne obciążenie na wale, przy którym silnik się uruchamia. Oczywistym warunkiem uruchomienia silnika jest: M n > M np . Jeśli ten warunek zostanie spełniony, wirnik silnika zacznie się przesuwać, a liczba jego obrotów n wzrośnie i spadnie s zmniejszyć. Jak widać na powyższym obrazku, wzrasta moment obrotowy silnika M n do maksimum M m odpowiadający krytycznemu poślizgowi s kpw konsekwencji wzrasta również nadwyżka dostępnej mocy silnika, która zależy od różnicy chwil. M i M np .
Im większa różnica między dostępnym momentem silnika (możliwe w danym poślizgu na wydajności) M i przeciwstawić się M np , im łatwiejszy jest tryb rozruchu i tym szybciej silnik osiąga stałą prędkość.
Jak pokazuje charakterystyka mechaniczna, przy pewnej liczbie obrotów (przy s = s kp) dostępny moment obrotowy silnika osiąga maksimum możliwe dla tego silnika (przy danym napięciu U ) wartości M t . Ponadto, silnik nadal zwiększa prędkość obrotową, ale jego jednorazowy moment obrotowy szybko maleje. Przy niektórych wartościach n i s moment obrotowy silnika staje się równy przeciwnemu: rozruch silnika jest zakończony, jego prędkość obrotowa jest ustawiona na wartość odpowiadającą stosunkowi:
![]()
Ten stosunek jest obowiązkowy dla wszystkich trybów obciążenia silnika, czyli dla wszystkich wartości M np nie przekraczając maksymalnego dostępnego momentu obrotowego silnika Mt . W tych granicach silnik automatycznie dostosowuje się do wszystkich wahań obciążenia: jeżeli podczas pracy silnika jego obciążenie mechaniczne wzrasta, przez chwilę M np będzie więcej niż moment opracowany przez silnik. Prędkość silnika zacznie spadać, a moment do zwiększenia.
Prędkość obrotowa zostanie ustawiona na nowym poziomie odpowiadającym równości. M i M np . Podczas zmniejszania obciążenia proces przejścia do nowego trybu ładowania zostanie odwrócony.
Jeśli moment obciążenia M np przekroczy Mt , silnik natychmiast się zatrzyma, ponieważ przy dalszym spadku obrotów moment obrotowy silnika maleje.
Dlatego maksymalny moment silnik M t zwany również wywróceniem lub momentem krytycznym.
Jeśli we wzorze chwili ![]() substytut:
substytut:
następnie otrzymujemy:
Biorąc pierwszą pochodną M i przyrównując ją do zera, stwierdzamy, że maksymalna wartość momentu obrotowego występuje pod warunkiem:
to jest z takim poślizgiem s = s kp w której rezystancja czynna wirnika jest równa rezystancji indukcyjnej
![]()
Znaczenia s kp większość silników asynchronicznych mieści się w przedziale 10 - 25%.
Jeśli w powyższym wzorze chwili zamiast aktywnego oporu r 2 zastępcza formuła indukcyjna
![]()
Maksymalny moment obrotowy silnika asynchronicznego jest proporcjonalny do kwadratu strumienia magnetycznego (a zatem kwadratu napięcia) i odwrotnie proporcjonalny do indukcyjności rozproszenia uzwojenia wirnika.
Ze stałym napięciem przyłożonym do silnika, jego przepływ F pozostaje praktycznie niezmieniony.
Indukcyjność wycieku w obwodzie wirnika jest również prawie stała. Dlatego też, gdy zmienia się rezystancja czynna w obwodzie wirnika, maksymalna wartość momentu obrotowego jest M t nie ulegnie zmianie, ale wystąpi na różnych slajdach (ze wzrostem aktywnego oporu wirnika - przy dużych wartościach poślizgu).
Oczywiście maksymalne możliwe obciążenie silnika zależy od jego wartości M t . Część robocza osiągów silnika leży w wąskim zakresie prędkości od nodpowiadający M t do. Dzięki n = n 1 (charakterystyka punktu końcowego) M = 0, tak jak w przypadku synchronicznej prędkości wirnika s = 0 i I 2 = 0.
Nominalny moment obrotowy, który określa wartość mocy znamionowej silnika, jest zwykle przyjmowany jako 0,4 - 0,6 M t . W związku z tym silniki asynchroniczne umożliwiają krótkotrwałe przeciążenie w 2 - 2,5 razy.
Głównym parametrem charakteryzującym tryb pracy silnika asynchronicznego jest poślizg względnej różnicy prędkości wirnika silnika n i jego pola n о: s = (n o - n) / n o.
Zakres charakterystyk mechanicznych odpowiadający 0 ≤ s ≤ 1 jest zakresem trybów silnika, a dla s< s кр работа двигателя устойчива, при s > s cr - jest niestabilny. Z s< 0 и s > 1 moment silnika jest skierowany przeciwnie do kierunku obrotu jego wirnika (odpowiednio, hamowania odzyskowego i hamowania przez przeciw-przełączanie).
Stabilna część charakterystyk mechanicznych silnika jest często opisywana przez formułę Klossa, zastępując parametry trybu nominalnego, w których można wyznaczyć krytyczny slip s cr:
 ,
,
gdzie: λ = M kp / M n - przeciążalność silnika.
Charakterystykę mechaniczną według podręcznika lub katalogu można przybliżyć w czterech punktach (ryc. 7.1):
Punkt 1 to idealny bieg jałowy, n = n o = 60 f / p, M = 0, gdzie: p to liczba par biegunów pole magnetyczne silnik;
Punkt 2 - nominalny, tryb: n = n n, M = Mn = 9550 P n / n n, gdzie P n - moc znamionowa silnika w kW;
Punkt 3 jest trybem krytycznym: n = ncr, M = Mcr = λ Mn;
Punkt 4 - tryb początkowy: n = 0, M = M start = β M n.
Analizując pracę silnika w zakresie obciążeń do Mn i nieco więcej, stabilną część charakterystyki mechanicznej można w przybliżeniu opisać równaniem prostej n = n 0 - vM, gdzie współczynnik "в" można łatwo wyznaczyć, zastępując parametry równania n n i Mn wartością nominalną w równaniu.
Zgodnie z projektem cewek, zwoje są podzielone na luźne cewki z miękkimi cewkami i uzwojeniami ze sztywnymi cewkami lub cewkami. Cewki miękkie wykonane są z okrągłych izolowany drut. Aby nadać pożądany kształt, są one wstępnie nawijane na szablony, a następnie umieszczane w izolowanych trapezowych rowkach (patrz rys. 3.4, w, gi 3.5, w); Międzyfazowe podkładki izolacyjne instalowane w procesie układania uzwojenia. Następnie cewki są wzmacniane w rowkach za pomocą klinów lub pokryw, nadają im ostateczny kształt (tworzą części czołowe), bandażują uzwojenie i impregnują je. Cały proces wytwarzania luźnych uzwojeń może być całkowicie zmechanizowany.
Cewki sztywne (cewki półprzewodnikowe) wykonane są z drutu o przekroju prostokątnym. Ostateczny kształt, jaki dają układanie w rowkach; w tym samym czasie nakładają izolację korpusową i międzyfazową. Następnie cewki są umieszczane w preizolowanych otwartych lub półotwartych rowkach. , wzmacniać i impregnować.
1. Uzwojenie jednowarstwowe - najbardziej odpowiedni do zmechanizowanego montażu, ponieważ w tym przypadku uzwojenie powinno być koncentryczne i wpasować się w szczeliny stojana po obu stronach cewki w tym samym czasie. Jednak ich zastosowanie prowadzi do zwiększonego zużycia drutu nawojowego ze względu na znaczną długość części przednich. Ponadto w takich uzwojeniach nie jest możliwe skrócenie skoku, co prowadzi do pogorszenia kształtu pola magnetycznego w szczelinie powietrznej, zwiększenia dodatkowych strat, występowania zapadów w charakterystyce mechanicznej i wzrostu hałasu. Jednak ze względu na swoją prostotę i niski koszt takie zwoje są szeroko stosowane w silniki indukcyjne mała moc do 10-15 kW.
2. Uzwojenie dwuwarstwowe- pozwala skrócić etap uzwojenia do dowolnej liczby podziałów ząbkowania, poprawiając w ten sposób kształt pola magnetycznego wytworzonego przez uzwojenie i tłumiąc wyższe harmoniczne na krzywej EMF. Ponadto dzięki uzwojeniu dwuwarstwowemu uzyskuje się prostszą formę połączeń czołowych, co upraszcza wytwarzanie uzwojeń. Takie uzwojenia są stosowane w silnikach o mocy ponad 100 kW ze sztywnymi cewkami, które są układane ręcznie.
W szczelinach rdzenia stojana znajduje się wielofazowe uzwojenie podłączone do sieci. prąd przemienny. Wielofazowe symetryczne uzwojenia z wieloma fazami tuwzględnij tuzwojenia fazowe, które są połączone w gwiazdę lub wielokąt. Tak więc, na przykład, w przypadku trójfazowego uzwojenia stojana liczba faz t =3, a uzwojenia można połączyć w gwiazdę lub trójkąt. Między sobą uzwojenia fazowe są przesuwane o kąt 360 / t grad; dla uzwojenia trójfazowego kąt ten wynosi 120 °.
Uzwojenia fazowe wykonane są z pojedynczych cewek połączonych szeregowo, równolegle lub szeregowo równolegle. W tym przypadku pod cewkaodnosi się do kilku połączonych szeregowo zwojów stojana umieszczonych w tych samych szczelinach i mających wspólną izolację względem ścianek rowka. Z kolei skręcićistnieją dwa aktywne (tj. Umieszczone w samym rdzeniu stojana) przewodniki ułożone w dwa rowki pod sąsiednimi przeciwległymi biegunami i połączone szeregowo. Przewody zlokalizowane poza rdzeniem stojana i łączące aktywne przewody ze sobą nazywane są częściami czołowymi. Proste części uzwojeń cewek ułożonych w szczelinach nazywane są bokami cewek lub części szczelinowych.
Rowki stojana, w których umieszczone są uzwojenia, tworzą tak zwane zęby po wewnętrznej stronie stojana. Odstęp między środkami dwóch sąsiednich zębów rdzenia stojana, mierzony na jego powierzchni w stosunku do szczeliny powietrznej, jest nazywany podział zębówlub podział rowków.
Wielowarstwowe cylindryczne zwoje cewki (Rysunek 3) są nawijane z okrągłego drutu i składają się z wielowarstwowych cewek umieszczonych wzdłuż pręta. Między cewkami (przez każdą cewkę lub przez dwie lub trzy cewki) kanały promieniowe można pozostawić do ochłodzenia. Takie uzwojenia są stosowane po stronie wysokiego napięcia, kiedy S st ≤ 335 kV × A, Ja St ≤ 45 A i U ln ≤ 35 kV.
Jednowarstwowe i dwuwarstwowe zwoje cylindryczne (rysunek 4) są nawijane z jednego lub kilku (do czterech) równoległych prostokątnych przewodników i są wykorzystywane do S St ≤ 200 kV × A, Ja artykuł ≤ 800 A i U ln ≤ 6 kV.
38) Charakterystyka mechaniczna silnika asynchronicznego.
Charakterystyka mechaniczna. Zależność prędkości wirnika od obciążenia (moment obrotowy na wale) nazywa się charakterystyką mechaniczną silnika indukcyjnego (rys. 262, a). Przy obciążeniu znamionowym prędkość obrotowa dla różnych silników wynosi zwykle 98-92,5% prędkości obrotowej n 1 (poślizgi = 2 - 7,5%). Im większe jest obciążenie, tj. Moment obrotowy, który musi wytworzyć silnik, tym mniejsza prędkość wirnika. Jak pokazuje krzywa
Ryc. 262. Charakterystyki mechaniczne silnika asynchronicznego: a - naturalny; b - przy uruchamianiu opornika
na rys. 262, a, prędkość obrotowa silnika asynchronicznego tylko nieznacznie maleje wraz ze wzrostem obciążenia w zakresie od zera do jego wartości maksymalnej. Dlatego mówi się, że taki silnik ma sztywną mechaniczną charakterystykę.
Silnik M max o najwyższym momencie obrotowym rozwija się z pewną poślizgu s kp, wynoszącą 10-20%. Stosunek Mmax / M nom determinuje przeciążalność silnika, a stosunek M n / M nom - jego właściwości początkowe.
Silnik może pracować stabilnie, zapewniając samoregulację, to jest automatycznie ustalając równowagę pomiędzy momentem obciążenia M przyłożonym do wału Mn i momentem M rozwiniętym przez silnik. Ten stan odpowiada górnej części charakterystyki przed osiągnięciem M max (do punktu B). Jeżeli moment obciążenia Mn przekroczy moment Mmax, wówczas silnik traci stabilność i zatrzymuje się, podczas gdy uzwojenia maszyny będą w sposób ciągły przepływać prądem 5-7 razy więcej niż nominalnie i mogą się palić.
Dzięki włączeniu wyjściowego rezystora w obwód uzwojenia wirnika otrzymujemy rodzinę cech mechanicznych (rys. 262, b). Charakterystyka 1, gdy silnik pracuje bez wyjściowego reostatu, nazywa się naturalnym. Charakterystyki 2, 3 i 4, uzyskane po połączeniu z uzwojeniem wirnika silnika oporowego o oporności R 1n (krzywa 2), R 2n (krzywa 3) i R 3n (krzywa 4), nazywane są właściwościami mechanicznymi reostatycznymi. Gdy wyjściowy reostat jest włączony, charakterystyka mechaniczna staje się bardziej miękka (bardziej stroma), gdy wzrasta opór obwodu rotora R2 i wzrasta wartość s cr. Zmniejsza to prąd rozruchowy. Moment rozruchowy Mn zależy również od r 2. Możesz wybrać rezystancję opornika, aby moment początkowy M p był równy największemu Mmax.
W silniku o zwiększonym momencie rozruchowym, naturalna charakterystyka mechaniczna jest zbliżona do kształtu silnika z opornikiem rozruchowym. Moment obrotowy silnika z podwójną klatką wiewiórczą jest równy sumie dwóch momentów wytworzonych przez klatki robocze i rozruchowe. Dlatego charakterystyka 1 (ryc. 263) może być uzyskana przez zsumowanie charakterystyk 2 i 3 utworzonych przez te komórki. Moment rozruchowy Mn takiego silnika jest znacznie większy niż moment M 'n zwykłego zwartego silnika. Charakterystyka mechaniczna silnika z głębokim rowkiem jest taka sama, jak w przypadku silnika klatkowego z podwójnym wiewiorem.
DLA JAKICHKOLWIEK DZIAŁAJĄCYCH CHARAKTERYSTYKÓW !!!
Dane dotyczące wydajnościCharakterystyki działania silnika asynchronicznego są nazywane zależnością prędkości obrotowej n (lub poślizgu s), momentu obrotowego na wale M 2, wydajności prądu stojana I 1? i cos? 1, od mocy netto P 2 = P mx przy nominalnych wartościach napięcia U 1 i częstotliwości f 1 (rys. 264). Są one zbudowane tylko dla strefy praktycznej stabilnej pracy silnika, tj. Z poślizgu równego zeru do poślizgu, który przekracza nominalną o 10-20%. Częstotliwość obrotu n przy wzrastającej mocy wyjściowej P2 zmienia się niewiele, podobnie jak w charakterystyce mechanicznej; moment obrotowy na wale M2 jest proporcjonalny do mocy P 2, jest mniejszy moment elektromagnetyczny M na wartości momentu hamującego M Tr wytworzonego przez siły tarcia.
Prąd I stojana zwiększa się wraz ze wzrostem mocy wyjściowej, ale przy P 2 = 0 występuje pewien prąd jałowy I 0. K. p. D. Zmienia się w przybliżeniu w ten sam sposób, co w transformatorze, zachowując wystarczająco dużą wartość we względnie szerokim zakresie obciążenia.
Najwyższa wartość KPD dla silników asynchronicznych o średniej i dużej mocy wynosi 0,75-0,95 (maszyny o dużej mocy mają odpowiednio wyższy KPD). Współczynnik mocy cos? 1 asynchroniczne silniki średniej i wysokiej mocy przy pełnym obciążeniu równe 0,7-0,9. W związku z tym ładują one stacje i sieci elektryczne o znacznych prądach biernych (od 70 do 40% prądu znamionowego), co jest znaczącą wadą tych silników.
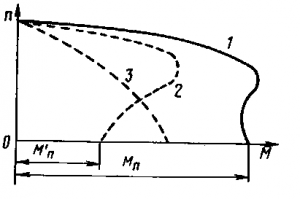 Ryc. 263. Charakterystyka mechaniczna silnika asynchronicznego o wysokim momencie rozruchowym (z podwójną klatką wiewiórkową)
Ryc. 263. Charakterystyka mechaniczna silnika asynchronicznego o wysokim momencie rozruchowym (z podwójną klatką wiewiórkową)
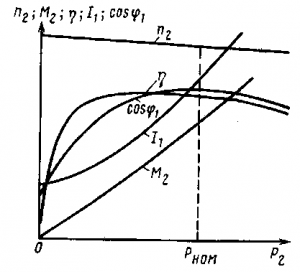 Ryc. 264. Asynchroniczna wydajność silnika
Ryc. 264. Asynchroniczna wydajność silnika
Przy obciążeniach 25-50% nominalnych, które często napotykają podczas działania różnych mechanizmów, współczynnik mocy jest redukowany do niezadowalających z wartości energetycznej punktu widzenia (0,5-0,75).
Podczas usuwania obciążenia z silnika, współczynnik mocy zostaje zredukowany do wartości 0,25-0,3 Silniki asynchroniczne nie powinny zezwalać na pracę na biegu jałowym i znaczne niedociążenie.
Pracuj przy zmniejszonym napięciu i zerwaniu jednej z faz. Zmniejszenie napięcia sieciowego nie ma znaczącego wpływu na prędkość wirnika silnika indukcyjnego. Jednak w tym przypadku maksymalny moment obrotowy, jaki może wytworzyć silnik asynchroniczny, jest znacznie zmniejszony (gdy napięcie spada o 30%, zmniejsza się o około 2 razy). Dlatego przy znacznym spadku napięcia silnik może się zatrzymać, a przy niskim napięciu może nie zostać włączony do pracy.
Na e. str. Gdy napięcie w sieci styku zmniejsza się, napięcie w sieci trójfazowej, z której zasilane są silniki indukcyjne, które napędzają maszyny pomocnicze (wentylatory, kompresory, pompy), zmniejsza się. W celu zapewnienia normalna praca silniki asynchroniczne przy zmniejszonym napięciu (powinny działać normalnie, gdy napięcie spadnie do 0,75U), moc wszystkich silników maszyn pomocniczych na e. str. około 1,5-1,6 razy większe niż to konieczne do napędzania ich przy napięciu nominalnym. Ta rezerwa mocy jest również konieczna z powodu pewnej asymetrii napięć fazowych, ponieważ na. str. Silniki asynchroniczne są zasilane nie przez generator trójfazowy, ale przez rozdzielacz fazowy. Przy niewyważeniu napięcia prądy fazowe silnika będą nierównomierne, a przesunięcie fazowe między nimi nie będzie równe 120 °. W wyniku tego większy prąd przepłynie przez jedną z faz, powodując zwiększone nagrzewanie uzwojeń tej fazy. To sprawia, że konieczne jest ograniczenie obciążenia silnika w porównaniu z jego pracą przy symetrycznym napięciu. Ponadto, gdy zachodzi asymetria napięcia, nie zmienia się okrągłe, ale eliptyczne wirujące pole magnetyczne i kształt mechanicznych charakterystyk silnika. Jednocześnie maleje jego największe i początkowe momenty. Asymetria napięcia charakteryzuje się współczynnikiem asymetrii, który jest równy średniemu względnemu (w procentach) odchyleniu napięcia w poszczególnych fazach od średniego napięcia (symetrycznego). System napięć trójfazowych uważa się za prawie symetryczny, jeżeli współczynnik ten wynosi mniej niż 5%.
Kiedy jedna z faz jest zerwana, silnik kontynuuje pracę, ale zwiększone prądy będą przepływać przez nienaruszone fazy, powodując zwiększone nagrzewanie się uzwojeń; taki system nie powinien być dozwolony. Rozruch silnika z fazą zerwaną jest niemożliwy, ponieważ nie wytwarza on wirującego pola magnetycznego, w wyniku czego wirnik silnika nie obraca się.
Zastosowanie silników asynchronicznych do napędzania urządzeń pomocniczych, np. str. Zapewnia znaczną przewagę nad silnikami prądu stałego. Podczas zmniejszania napięcia w sieci styku, prędkość obrotowa silników asynchronicznych, a w konsekwencji przepływ sprężarek, wentylatorów, pomp praktycznie nie zmieniają się. W silnikach prądu stałego prędkość obrotowa jest jednak proporcjonalna do napięcia zasilania, więc zasilanie tych maszyn jest znacznie zmniejszone.
Silnik równoległego wzbudzenia jest silnikiem prądu stałego, którego uzwojenie wzbudzenia jest połączone równolegle z uzwojeniem twornika (rys. 1). Podczas przyjmowania charakterystyki napięcie znamionowe U n = const doprowadzane jest do obwodu twornika.
Ryc. 1 - Równoległy obwód silnika wzbudzenia
Prąd pobierany przez silnik z sieci jest określony przez sumę I = I a + I c, prąd wzbudzenia wynosi zwykle I c = (0,03 ... 0,04) I n. Wszystkie charakterystyki silnika są usuwane przy stałych oporach w obwodach wzbudzających r в = const i kotwach
Szybkość reakcji.
Zależność n = f (I a) z U n = const i I in = const
Z równania EMF dla silnika elektrycznego
![]()
![]()
Jak można zauważyć na podstawie wyrażenia, prędkość obrotowa silnika zależy od dwóch czynników - zmian prądu i przepływu obciążenia. Gdy prąd obciążenia wzrasta, spada napięcie rezystancji obwodu twornika, a prędkość silnika maleje.
Poprzeczna reakcja armatury demagnetyzuje silnik ze wzrostem prądu I zmniejsza przepływ, a zatem zwiększa prędkość silnika. Oba te czynniki działają w związku z obrotami maszyny, a rodzaj charakterystyki prędkości zależy od ich efektu netto.
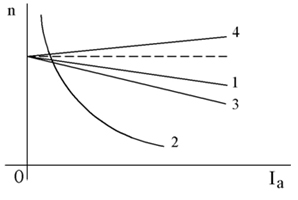
Na rys. 2 pokazuje trzy różne charakterystyki prędkości obrotowej silnika (krzywe 1, 2, 3). Krzywa 1 - charakterystyka prędkości z przewagą wpływu I a ,r, krzywa 2 - oba czynniki są w przybliżeniu zrównoważone, krzywa 3 - przeważa współczynnik odmagnesowania reakcji twornika.

Ryc. 2 - Równoległe charakterystyki silnika wzbudzenia
Z uwagi na to, że w rzeczywistych silnikach zmiana strumienia Φ jest nieznaczna, reakcja prędkości jest prawie prosta. W wielu nowoczesnych maszynach o równoległym wzbudzeniu kompensującym efekt reakcji poprzecznej szkieletu, jest zainstalowane dodatkowe uzwojenie stabilizujące, które całkowicie lub częściowo kompensuje efekt reakcji twornika.
Normalną postacią charakterystyki prędkości, przy której zapewniona jest stabilna praca silnika, jest charakterystyka postaci krzywej 1.
Nachylenie charakterystyki jest określone przez wielkość rezystancji obwodu twornika withoutr bez uwzględnienia reakcji armatury. Gdy dodatkowa rezystancja w łańcuchu kotwicy nie jest uwzględniona, charakterystyka nazywana jest naturalną. Naturalna charakterystyka równoległego silnika wzbudzenia jest dość sztywna. Zwykle gdzie n o jest prędkością obrotową podczas pracy na biegu jałowym. Gdy dodatkowa rezystancja R rg jest uwzględniona w obwodzie twornika, nachylenie charakterystyki wzrasta, stają się "miękkie" i nazywane są sztucznymi lub reostatycznymi.
Charakterystyka momentu - jest zależnością M = f (Ia) z r in = const, U = U n i Σr = const. W stanie ustalonym silnika według
mamy M em = M 2 + M 0 = c m I a F. Jeśli podczas pracy maszyny przepływ F nie uległ zmianie, wówczas charakterystyka momentu byłaby bezpośrednia (charakterystyka 4, ryc. 2). W rzeczywistości strumień Φ ze spadkiem prądu Ia nieznacznie maleje z powodu efektu rozmagnesowania reakcji twornika, więc charakterystyka momentu obrotowego jest lekko pochylona w dół (krzywa 5). Charakterystyka przydatnego momentu znajduje się poniżej krzywej momentu elektromagnetycznego o wartość momentu jałowego (krzywa 6).
Charakterystyczna wydajność η = f (I a) jest usuwany przy U = U n, r in = const, Σr = const i ma typową postać dla silników elektrycznych (charakterystyka 7 na Rys. 2). Wydajność wzrasta gwałtownie wraz ze wzrostem obciążenia z biegu jałowego do 0,25 P n, osiąga swoją maksymalną wartość przy P = (0,5 ... 0,75) P n, a następnie do P = P n pozostaje prawie niezmieniona. Zwykle w silnikach o małej mocy η = 0,75 ... 0,85, aw silnikach o średniej i wysokiej mocy η = 0,85 ... 0,94.
Charakterystyka mechaniczna reprezentuje zależność n = f (M) przy U = U n, I in = const i Σr = const. Wyrażenie analityczne dla charakterystyk mechanicznych można uzyskać na podstawie równania siły elektromotorycznej silnika elektrycznego

Określanie prądu I i od wyrażenia M = C e I a F i podstawianie tej wartości prądu w powyższym wyrażeniu, otrzymujemy
![]()
Jeśli zignorujemy reakcję twornika i założymy, że strumień Φ nie zmienia się, wówczas charakterystyki mechaniczne silnika elektrycznego o wzbudzeniu równoległym mogą być przedstawiane jako linie proste (ryc. 3), których nachylenie zależy od rezystancji R pg zwory zawartej w obwodzie. Gdy R pr = 0, charakterystyka nazywana jest naturalną.
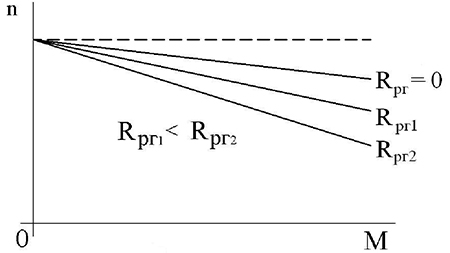
Ryc. 3 - Charakterystyka mechaniczna równoległego silnika wzbudzenia
Należy pamiętać, że gdy obwód wzbudzenia jest przerwany, to = 0 prędkości silnika n → ∞, tj. silnik "ściga się", więc musi być natychmiast odłączony od sieci.
Schemat elektryczny silnika elektrycznego z mieszanym napędem pokazano na rys. 1. W silniku tym znajdują się dwa uzwojenia wzbudzenia - równoległe (bocznikowe, SHO) połączone równolegle z obwodem twornika i szeregowe (szeregowe, CO) połączone szeregowo z obwodem twornika. Uzwojenia te na strumieniu magnetycznym mogą być uwzględniane w zależności od lub przeciwnie.
Ryc. 1 - Obwód silnikowy wzbudzenia mieszanego
Jeśli uzwojenia wzbudzenia są włączone konsekwentnie, ich MDS są sumowane, a powstały strumień Φ jest w przybliżeniu równy sumie strumieni generowanych przez oba uzwojenia. W przypadku przepływu czołowego uzyskany przepływ jest równy różnicy między przepływami uzwojeń równoległych i szeregowych. Zgodnie z tym, właściwości i charakterystyki mieszanego silnika wzbudzenia zależą od sposobu włączania uzwojeń i stosunku ich MDS.
Szybkość reakcji n = f (I a) z U = U n i I in = const (tutaj I in - prąd w uzwojeniu równoległym).
Wraz ze wzrostem obciążenia, powstały strumień magnetyczny ze stałym połączeniem uzwojeń wzrasta, ale w mniejszym stopniu niż sekwencyjny silnik wzbudzający, dlatego też reakcja prędkości w tym przypadku jest bardziej miękka niż w przypadku równoległego silnika wzbudzającego, ale bardziej sztywna niż sekwencyjny silnik wzbudzenia.
Stosunek uzwojeń MDS może się znacznie różnić. Silniki o słabym uzwojeniu sekwencyjnym mają lekko opadającą charakterystykę prędkości (krzywa 1, ryc. 2).
Ryc. 2 - Charakterystyki prędkości mieszanego silnika wzbudzenia
Im większy udział uzwojenia szeregowego w tworzeniu MDS, tym bliższa jest reakcja szybkościowa zbliżona do prędkości silnika wzbudzenia szeregowego. Na figurze 2 linia 3 przedstawia jedną z pośrednich charakterystyk mieszanego silnika wzbudzenia, a dla porównania podano charakterystykę sekwencyjnego silnika wzbudzenia (krzywa 2).
Gdy uzwojenie szeregowe zostanie włączone przy rosnącym obciążeniu, powstały strumień magnetyczny zmniejsza się, co prowadzi do zwiększenia prędkości silnika (krzywa 4). Przy takiej szybkości reakcji działanie silnika może być niestabilne, ponieważ sekwencyjny strumień uzwojenia może znacznie zmniejszyć powstały strumień magnetyczny. Dlatego silniki z przeciwdziałaniem nawijaniem nie mają zastosowania.
Charakterystyka mechaniczna n = f (M) z U = U n i I in = const. wymieszanie mieszane silnika pokazano na rys. 3 (wiersz 2).
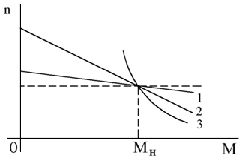
Ryc. 3 - Charakterystyka mechaniczna mieszanego silnika wzbudzenia
Znajduje się pomiędzy charakterystykami mechanicznymi równoległych silników (krzywa 1) i sekwencyjnych (krzywa 3). Wybierając odpowiednio MDS obu uzwojeń, możliwe jest uzyskanie silnika elektrycznego o charakterystyce zbliżonej do silnika o wzbudzeniu równoległym lub szeregowym.