Ministerstwo Edukacji i Nauki Federacji Rosyjskiej
Instytucja edukacyjna państwa federalnego
wyższe wykształcenie zawodowe
"South Ural State University"
Wydział "Avtotraktorny"
Dział "Eksploatacja transportu drogowego"
Silnik asynchroniczny REFERATO o dyscyplinie "Ogólna elektrotechnika i elektronika"
Sprawdziłem ________ / Krymsky V.V. / _______________ 20 ____ g. Autorem pracy był student grupy AT-262 __________ / Ivanov V.D./_______________ 20 ____.
Wprowadzenie 4
Asynchroniczne silniki elektryczne. 5
Wirnik klatkowy. Rotor maszyna asynchroniczna wpisz "klatka wiewiórki." 6
Zwarte uzwojenie wirnika, często nazywane "klatką wiewiórkową" ze względu na zewnętrzne podobieństwo konstrukcji, składa się z prętów miedzianych lub aluminiowych zwartych z końców dwóch pierścieni. Rdzenie tego uzwojenia są wsuwane w rowki rdzenia wirnika. W maszynach o małej i średniej mocy, wirnik jest zwykle wytwarzany przez wlewanie stopionego stopu aluminium w rowki rdzenia wirnika. Wraz z prętami klatki wiewiórki, pierścienie zwarciowe i ostrza końcowe są odlewane, aby samoczynnie przewietrzyć wirnik i przewietrzyć maszynę jako całość. W maszynach dużej mocy "klatka wiewiórkowa" wykonana jest z miedzianych prętów, których końce są przyspawane do pierścieni zwarciowych. 6
Sposoby sterowania silnikiem asynchronicznym. 6
Zasada działania asynchroniczne silniki elektryczne. 9
Wirnik fazowy. 10
Wirnik fazowy ma trójfazowe (ogólnie - wielofazowe) uzwojenie, zwykle połączone "gwiazdką" i wyświetlane na pierścieniu kontaktowym, obracające się razem z wałem maszyny. Użycie szczotek metalowo-grafitowych przesuwających się wzdłuż tych pierścieni do obwodu uzwojenia wirnika: 10
Uruchamianie silnika asynchronicznego z wirnikiem fazowym. 11
Sposoby sterowania silnikiem asynchronicznym. 12
Regulacja reostatyczna. 12
Główne asynchroniczne awarie silnika z wirnik fazowy 14
Wniosek 15
Piśmiennictwo 16
Wprowadzenie
Trójfazowy asynchroniczny silnik elektryczny różni się od jednofazowego silnika asynchronicznego tym, że na silniku jednofazowym, a dokładniej na jego stojanie, jest umieszczone uzwojenie jednofazowe i nazywane jest uzwojeniem głównym lub uzwojeniem roboczym.
Wirnik silnika jednofazowego jest taki sam, jak trójfazowy silnik asynchroniczny. Jednofazowe asynchroniczne silniki elektryczne znajdują duże zastosowanie w małej mocy - do 2 kW. Jednofazowe asynchroniczne silniki elektryczne o mocy do 500 W są stosowane w domowych urządzeniach elektrycznych. Początkowy (początkowy) moment obrotowy jest nieobecny w elektrycznych jednofazowych silnikach asynchronicznych. Dlaczego podczas łączenia głównego uzwojenia silnika w sieci z pojedynczą fazą jego wirnika nie można wykonywać zwojów.
Aby zapewnić uruchomienie silnika jednofazowego, na uzwojeniu zamontowane jest inne uzwojenie - uzwojenie początkowe. Odnośnie głównego uzwojenia, znajduje się pod kątem 90 ° i jest połączony szeregowo z kondensatorem lub induktorem. W momencie połączenia uzwojenia początkowego i głównego z siecią wytwarzane przez nie strumienie magnetyczne wytwarzają wirujące pole magnetyczne. Z tego powodu prąd indukcyjny pojawia się w rotorze. Ze względu na oddziaływanie wirującego pola magnetycznego wytwarzanego przez prądy w uzwojeniach stojana i pole magnetycznegenerowany przez prąd indukcyjny w wirniku, rotor wchodzi w ruch obrotowy.
W momencie obrotu wirnika powstaje poślizg, dlatego uzwojenie początkowe w tym przypadku nie jest po prostu konieczne i jest wyłączane przez przełącznik bezwładnościowy (odśrodkowy) lub specjalny przekaźnik. Trójfazowy silnik asynchroniczny może być również używany jako silnik jednofazowy. Jednak wadą tej metody jest konieczność stosowania drogich dużych kondensatorów, ponieważ na każde 100 watów mocy wymagany jest kondensator o pojemności około 10 mikrofaradów.
Asynchroniczne silniki elektryczne.
Obecnie udział silników asynchronicznych stanowi co najmniej 80% wszystkich silników elektrycznych produkowanych przez przemysł. Obejmują one trójfazowe silniki asynchroniczne.
Trójfazowe asynchroniczne silniki elektryczne są szeroko stosowane w urządzeniach automatyki i zdalnego sterowania, urządzeniach domowych i medycznych, urządzeniach do rejestracji dźwięku itp.
Maszyna asynchroniczna jest samochód elektryczny prąd przemienny, którego prędkość wirnika nie jest równa (w trybie silnikowym mniej) do częstotliwości obrotu pola magnetycznego wytwarzanej przez prąd uzwojenia stojana.
W wielu krajach maszyny zbierające są również w rankingu maszyn asynchronicznych. W Rosji maszyny asynchroniczne zaczęli wywoływać maszyny indukcyjne.
Obecnie maszyny asynchroniczne stanowią większość samochodów elektrycznych. Używane są głównie jako silniki elektryczne i są głównymi przetwornikami energii elektrycznej w energię mechaniczną.
Zalety asynchronicznych silników elektrycznych:
Szeroka dystrybucja trójfazowych silników asynchronicznych jest wyjaśniona prostotą ich konstrukcji, niezawodnością działania, dobrymi właściwościami użytkowymi, niskim kosztem i łatwością konserwacji.
Wady:
1. Mały punkt wyjścia.
2. Znaczący prąd rozruchowy.
Maszyna asynchroniczna ma stojan i wirnik, oddzielone szczeliną powietrzną. Jego aktywnymi częściami są uzwojenia i rdzeń magnetyczny; wszystkie pozostałe części są strukturalne, zapewniając niezbędną wytrzymałość, sztywność, chłodzenie, zdolność do obracania się itp.
Uzwojenie stojana jest uzwojeniem trójfazowym (w ogólności - wielofazowym), którego przewody są równomiernie rozmieszczone wokół obwodu stojana i układane fazowo w rowkach o kątowej odległości 120 el. grad Fazy uzwojenia stojana są połączone zgodnie ze standardowym schematem "trójkąt" lub "gwiazda" i podłączone do trójfazowej sieci prądowej. Rdzeń magnetyczny stojana został poddany ultemagnetyzacji w procesie zmiany (obrotu) strumienia magnetycznego uzwojenia wzbudzenia, dlatego jest wykonany z laminatu (zwerbowanego z płytek) ze stali elektrotechnicznej, aby zapewnić minimalne straty magnetyczne.
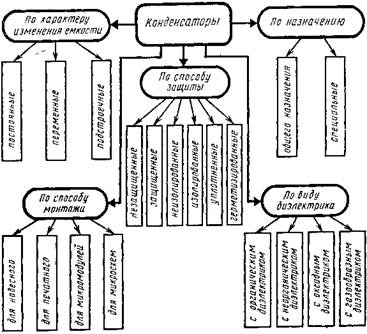
Konstruując maszyny asynchroniczne wirnika są podzielone na dwa główne typy: zwarte rotor i z faza wirnik. Oba typy mają taką samą konstrukcję stojana i różnią się tylko wydajnością uzwojenia wirnika. Rdzeń magnetyczny wirnika jest podobny do obwodu magnetycznego stojana - od stali elektrotechnicznej i laminowanej.
Wirnik klatkowy. Asynchroniczny wirnik klatkowy.
Zwarte uzwojenie wirnika, często nazywane "klatką wiewiórkową" ze względu na zewnętrzne podobieństwo konstrukcji, składa się z prętów miedzianych lub aluminiowych zwartych z końców dwóch pierścieni. Rdzenie tego uzwojenia są wsuwane w rowki rdzenia wirnika. W maszynach o małej i średniej mocy, wirnik jest zwykle wytwarzany przez wlewanie stopionego stopu aluminium w rowki rdzenia wirnika. Wraz z prętami klatki wiewiórki, pierścienie zwarciowe i ostrza końcowe są odlewane, aby samoczynnie przewietrzyć wirnik i przewietrzyć maszynę jako całość. W maszynach dużej mocy "klatka wiewiórkowa" wykonana jest z miedzianych prętów, których końce są przyspawane do pierścieni zwarciowych.
Często szczeliny wirnika lub stojana czynią skośny zmniejszenie większą EMF harmonicznych wywołanego magnetyczne pulsacji strumienia ze względu na obecność zębów oporu magnetycznego jest znacznie niższy niż opór magnetyczny uzwojenia, jak również do zmniejszenia hałasu spowodowanego przyczynami magnetycznych. Aby poprawić charakterystykę rozruchową asynchronicznego silnika elektrycznego za pomocą wirnika klatkowego, a mianowicie zwiększyć początkowy moment obrotowy i zmniejszyć prąd rozruchowy, na rotorze zastosowano specjalny kształt rowka. W tym samym czasie zewnętrzna część rowka wirnika zewnętrznego od osi obrotu ma mniejszy przekrój poprzeczny niż wewnętrzny. Pozwala to na wykorzystanie efektu przesunięcia prądu, dzięki czemu zwiększa się aktywny opór uzwojenia wirnika przy dużych przesuwach (przy uruchomieniu).
Silniki asynchroniczne z rotor klatkowy mają mały początkowy moment obrotowy i znaczny prąd rozruchowy, co stanowi znaczącą wadę "klatki wiewiórki". Dlatego są one stosowane w tych napędach elektrycznych, które nie wymagają dużych punktów początkowych. Spośród zalet należy zwrócić uwagę na łatwość wytwarzania i brak mechanicznego kontaktu z nieruchomą częścią maszyny, co gwarantuje trwałość i zmniejsza koszty konserwacji. Ze specjalną konstrukcją rotora, gdy rdzeń magnetyczny "rotor" pozostaje nieruchomy, a tylko pusty aluminiowy cylinder (klatka wiewiórka lub zwarte uzwojenie wirnika) obraca się w szczelinie magnetycznej, możliwe jest uzyskanie małej bezwładności silnika.
Urządzenie asynchronicznych silników elektrycznych z wirnikiem fazowym.
Głównymi częściami każdego asynchronicznego silnika są część stała - stojan i część wirująca, zwana wirnikiem.
Stojan trójfazowego silnika asynchronicznego składa się z laminowanego obwodu magnetycznego wciśniętego w odlewaną ramę. Na wewnętrznej powierzchni obwodu magnetycznego znajdują się rowki do układania przewodów uzwojenia. Przewody te są bokami miękkich cewek wieloobrotowych tworzących trzy fazy uzwojenia stojana. Osie geometryczne cewek są przesunięte w przestrzeni względem siebie o 120 stopni.
Fazy uzwojenia można podłączyć zgodnie ze schematem "gwiazda" lub "trójkąt" w zależności od napięcia sieciowego. Na przykład, jeśli w paszporcie silnika podano wartość 220/380 V, a następnie przy napięciu 380 V, fazy są połączone z "gwiazdą". Jeśli napięcie wynosi 220 V, to uzwojenia są połączone w "trójkącie". W obu przypadkach napięcie fazowe silnika wynosi 220 V.
Wirnik trójfazowego silnika asynchronicznego jest cylindrem wykonanym z wytłoczonych arkuszy stali elektrotechnicznej i zamontowany na wale. W zależności od typu uzwojenia wirniki trójfazowych silników asynchronicznych są podzielone na zwarcie i fazę.
Dolivo-Dobrovolsky jako pierwszy zbudował silnik z wirnikiem klatkowym i zbadał jego właściwości. Dowiedział się, że takie silniki mają bardzo poważną wadę - ograniczony początkowy moment obrotowy. Dolivo-Dobrovolsky nazwał przyczynę tego niedociągnięcia - bardzo krótki rotor. Zaproponował także projekt silnika z wirnikiem fazowym.
Na rys. pokazano przekrój maszyny asynchronicznej z wirnikiem fazowym: 1 - łóżko, 2 - uzwojenie stojana, 3 - wirnik, 4 - pierścienie ślizgowe, 5 - szczotki.
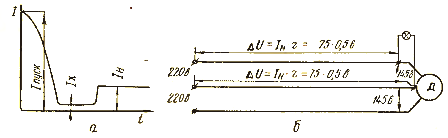
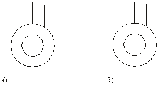
Na wirniku fazowym uzwojenie jest trójfazowe, podobnie jak uzwojenie stojana, z taką samą liczbą par biegunów. Cewki uzwojenia są układane w szczelinach rdzenia wirnika i są połączone zgodnie z gwiazdą. Końce każdej fazy są połączone z pierścieniami ślizgowymi przymocowanymi do wału wirnika, a poprzez szczotki są wyprowadzane do obwodu zewnętrznego. Pierścienie ślizgowe wykonane są z mosiądzu lub stali, muszą być izolowane od siebie i od wału. Szczotki metalowe są używane jako szczotki, które są dociskane do pierścieni kontaktowych za pomocą sprężyn szczotkowo-sprężynowych zamocowanych w korpusie maszyny. Na rys. symbol silnika asynchronicznego z wirnikiem zwartym (a) i fazowym (b).
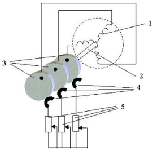
W silnikach asynchronicznych o wyższej mocy i specjalnych maszynach o małej mocy, wirniki fazowe służą do poprawy właściwości rozruchowych i regulacyjnych. W tych przypadkach uzwojenie trójfazowe jest układane na wirniku, a osie geometryczne cewek fazowych (1) przesunięte w przestrzeni względem siebie o 120 stopni.
Fazy uzwojenia połączone są gwiazdą, a ich końce połączone są z trzema pierścieniami kontaktowymi (3), zamontowanymi na wale (2) i elektrycznie odizolowanymi od wału i od siebie nawzajem. Za pomocą szczotek (4), które są w styku ślizgowym z pierścieniami (3), możliwe jest dołączenie rezystorów nastawczych (5) w obwodach uzwojenia fazowego.
Silnik asynchroniczny z wirnikiem fazowym ma lepsze właściwości rozruchowe i regulacyjne, jednak ma dużą masę, rozmiar i koszt niż silnik asynchroniczny ze zwartym wirnikiem.
Zasada działania asynchronicznych silników elektrycznych.
Zasada działania maszyny asynchronicznej opiera się na wykorzystaniu wirującego pola magnetycznego. Gdy trójfazowe uzwojenie stojana jest połączone z siecią, powstaje wirujące pole magnetyczne, którego prędkość kątowa jest określana przez częstotliwość sieciową f oraz liczbę par biegunów uzwojenia p, tj. ω1 = 2πf / p
Przecinając przewodniki uzwojeń stojana i wirnika, pole to indukuje siłę elektromotoryczną w uzwojeniach (zgodnie z prawem indukcji elektromagnetycznej). Gdy uzwojenie wirnika jest zamknięte, jego EMF indukuje prąd w obwodzie wirnika. W wyniku oddziaływania prądu z powstałym małym polem powstaje moment elektromagnetyczny. Jeżeli moment ten przekroczy moment oporu na wale silnika, wał zaczyna się obracać i uruchamiać mechanizm roboczy. Zwykle prędkość kątowa wirnika ω2 nie jest równa prędkości kątowej pola magnetycznego ω1, zwanego synchronicznym. Stąd nazwa silnika asynchronicznego, tj. niesynchroniczny.
Działanie maszyny asynchronicznej charakteryzuje się poślizgiem s, który jest względną różnicą między prędkościami kątowymi pola ω1 a wirnikiem ω2: s = (ω1-ω2) / ω1

Wartość i znak poślizgu, w zależności od prędkości kątowej wirnika względem pola magnetycznego, określają tryb działania maszyny asynchronicznej. Tak więc, w idealnym trybie pracy na biegu jałowym, wirnik i pole magnetyczne obracają się z tą samą częstotliwością w tym samym kierunku, poślizg wynosi s = 0, wirnik jest nieruchomy względem wirującego pola magnetycznego, pole elektromagnetyczne nie jest indukowane w jego uzwojeniu, prąd wirnika i moment elektromagnetyczny maszyny są zerowe. Gdy rozruch wirnika w pierwszym momencie jest nieruchomy: ω2 = 0, s = 1. W ogólnym przypadku poślizg w trybie silnika zmienia się z s = 1 przy rozruchu na s = 0 w idealnym trybie pracy na biegu jałowym.
Kiedy rotor obraca się z prędkością ω2\u003e ω1 w kierunku obrotu pola magnetycznego, poślizg staje się ujemny. Maszyna wchodzi w tryb generowania i rozwija moment hamowania. Kiedy rotor obraca się w kierunku przeciwnym do kierunku obrotu magnetycznego poli (s\u003e 1), maszyna asynchroniczna przełącza się w tryb opozycji, a także rozwija moment hamowania. Tak więc w zależności od poślizgu rozróżnia się tryby pracy silnika (s = 1 ÷ 0), generator (s = 0 ÷ -∞) i tryb rezerwowy (s = 1 ÷ + ∞). Tryby i opozycje generatora są używane do hamowania silników indukcyjnych.
Wirnik fazowy.
Wirnik fazowy ma trójfazowe (ogólnie - wielofazowe) uzwojenie, zwykle połączone "gwiazdką" i wyświetlane na pierścieniu kontaktowym, obracające się razem z wałem maszyny. Użycie szczotek metalowo-grafitowych przesuwających się wzdłuż tych pierścieni do obwodu uzwojenia wirnika:
zawiera opornik obciążeniowy, który działa jako dodatkowy rezystancja czynna, taki sam dla każdej fazy. Zmniejszając prąd rozruchowy, zwiększ moment rozruchowy do wartości maksymalnej (w pierwszym punkcie czasowym). Takie silniki są używane do napędzania mechanizmów, które unoszą się przy dużych obciążeniach lub wymagają płynnej kontroli prędkości.
Uwzględnij cewki indukcyjne (dławiki) w każdej fazie wirnika. Opór dławików zależy od częstotliwości płynącego prądu, a jak wiadomo, w wirniku w pierwszym momencie wystrzelenia, częstotliwość prądów poślizgowych jest największa. Gdy wirnik się obraca, częstotliwość indukowanych prądów maleje, a wraz z nim zmniejsza się opór przepustnicy. Opór indukcyjny w obwodzie wirnika fazowego pozwala zautomatyzować procedurę uruchamiania silnika i, jeśli to konieczne, "podnieść" silnik, którego prędkość spadła z powodu przeciążenia. Indukcyjność utrzymuje prądy wirnika na stałym poziomie.
dołącz źródło prąd staływ ten sposób uzyskano maszynę synchroniczną.
obejmują moc z falownika, która pozwala kontrolować charakterystykę prędkości obrotowej i momentu obrotowego silnika. Jest to specjalny tryb działania (podwójna maszyna zasilająca). Możliwe jest włączenie napięcia sieciowego bez falownika, z fazą przeciwną do tej podawanej przez stojan.
Uruchamianie silnika asynchronicznego z wirnikiem fazowym.
Warunki początkowe silnika asynchronicznego z uzwojeniem fazowym wirnika można znacznie poprawić kosztem pewnych komplikacji związanych z projektowaniem i konserwacją silnika.
Od Aktywna rezystancja uzwojenia fazowego wirnika jest stosunkowo niewielka, wówczas aby uzyskać maksymalny początkowy moment rozruchowy, konieczne jest uwzględnienie rezystora rozruchowego z oporem fazowym w obwodzie wirnika
Jak tylko rotor zacznie się obracać, poślizg maleje, aw miejscu z nim EMF i prąd wirnika, w wyniku czego zmniejsza się moment obrotowy. Aby silnik mógł nadal osiągać moment obrotowy zbliżony do maksymalnego, rezystancja wyjściowego rektora musi być stopniowo zmniejszana. Na koniec, gdy silnik osiągnie znamionową prędkość, wyjściowy rezystor jest zwarty.
Aby zmniejszyć straty mechaniczne i zużycie pierścieni i szczotek, silniki są czasami wyposażone w urządzenie do podnoszenia szczotek i zwierania pierścieni.
Im bardziej powinien być punkt wyjścia, tym bliżej jest maksymalny momenttym większy będzie prąd początkowy. Z tego powodu, tylko w szczególnie trudnych warunkach rozruchu, reostat jest tak dobrany, aby początkowy moment obrotowy był równy maksymalnemu.
Aby rezystor rozruchowy nie przegrzał się podczas rozruchu, jego moc musi być w przybliżeniu równa mocy silnika. Dla silników o wysokiej mocy wyjściowe oporniki są wykonane z chłodzeniem olejem.
Oczywiście zastosowanie wyjściowego rektora znacznie poprawia warunki początkowe silnika indukcyjnego, zwiększając początkowy moment obrotowy i zmniejszając prąd rozruchowy.
Sposoby sterowania silnikiem asynchronicznym.
Uruchamianie silnika asynchronicznego prąd przemienny rozumie się zmianę prędkości wirnika i / lub jego moment. Istnieją następujące sposoby sterowania silnikiem asynchronicznym:
roster - zmiana częstotliwości obrotu ciśnienia tętniczego za pomocą wirnika fazowego poprzez zmianę rezystancji opornika w obwodzie wirnika, dodatkowo zwiększa moment rozruchowy;
częstotliwość - zmiana częstotliwości rotacji ciśnienia tętniczego poprzez zmianę częstotliwości prądu w sieci zasilającej, co pociąga za sobą zmianę częstotliwości obrotu pola stojana. Stosuje przetwornicę częstotliwości rozruchu silnika
przełączanie uzwojenia z gwiazdy na trójkąt w trakcie uruchamiania silnika, co zmniejsza około trzy razy prądy rozruchowe w uzwojeniu, ale jednocześnie zmniejsza się moment;
pulsacyjne - poprzez zastosowanie specjalnego źródła zasilania (np. Piłokształtnego);
wprowadzenie dodatkowego e. D. s zgadza się z lub przeciw częstotliwości poślizgu w obwodzie wtórnym.
zmieniając liczbę par biegunów, jeśli takie przełączanie jest przewidziane konstruktywnie (tylko dla k. Wirników);
zmieniając amplitudę napięcia zasilania, gdy zmienia się tylko amplituda (lub wartość skuteczna) napięcia sterującego. Następnie wektory sterowania i napięcia wzbudzenia pozostają prostopadłe (start autotransformatora);
regulacja fazowa charakteryzuje się tym, że zmianę prędkości wirnika uzyskuje się poprzez zmianę przesunięcia fazowego pomiędzy wektorami napięcia wzbudzenia i sterowania;
metoda fazy amplitudowej obejmuje dwie opisane metody;
włączenie do łańcucha dostaw reaktorów statorowych;
rezystancja indukcyjna dla silnika z wirnikiem fazowym.
Regulacja reostatyczna.
W trójfazowych silnikach asynchronicznych z wirnikiem fazowym stosuje się metodę regulacji prędkości wirnika z wykorzystaniem reostatu. Osiąga się to poprzez wprowadzenie do obwodu uzwojeń fazowych wirnika regulowanego trójfazowego reostru, jak podczas rozruchu silnika. Jednak ten reostat powinien być zaprojektowany do ciągłego obciążenia prądem wirnika, a nie do krótkotrwałego, jak wyjściowy reostat. Zwiększenie aktywnego oporu obwodu wirnika zmienia charakterystykę M bp (s) - sprawia, że jest bardziej miękki. Jeśli przy stałym momencie obrotowym na wale silnika, aby zwiększyć rezystancję czynną obwodu wirnika poprzez stopniowe zwiększanie rezystancji reostatu ( r str 1 < r str 2 < r str 3 ), następnie punkt roboczy będzie z jedną krzywą M BP (s) do następnego, odpowiednio do zwiększonej rezystancji obwodu wirnika, odpowiednio, co zwiększa poślizg, a w konsekwencji zmniejsza prędkość silnika. W ten sposób można zmienić prędkość wirnika z nominalnej na pełną. Wadą tej metody regulacji są stosunkowo duże straty energii.
Główny silnik indukcyjny z wirnikiem fazowym
|
Wadliwe działanie |
Możliwa przyczyna |
|
Nie rozwija nominalnej prędkości obrotowej i szumów |
Jednostronne przyciąganie wirnika z powodu: a) zużycia łożyska; b) pochylenie osłon łożysk; c) zginanie wału |
|
Niska prędkość i brzęczenie, prąd we wszystkich trzech fazach jest inny i nawet na biegu jałowym przekracza wartość znamionową |
1. Uzwojenia są podłączone niepoprawnie i jedna z faz okazała się "odwrócona" 2. Pręt uzwojenia wirnika jest uszkodzony |
|
Wirnik nie obraca się ani nie obraca powoli, silnik mruczy |
Faza uzwojenia stojana jest odcięta. |
|
Wibruje cały samochód |
1. Odłączone centrowanie sprzęgających półsprzęgieł lub współosiowość wałów 2. Niezrównoważony wirnik, koło pasowe i półsprzęgła |
|
Wibracje znikają po odłączeniu od sieci, prąd w fazach stojana staje się inny, jedna z sekcji uzwojenia stojana szybko się nagrzewa |
Zwarcie w uzwojeniu stojana |
|
Przegrzewa się przy znamionowych przeciążeniach |
1. Zwarcie w uzwojeniu stojana 2. Zanieczyszczenie uzwojenia lub przewodów wentylacyjnych |
|
Niski opór |
1. Nawilżanie lub zanieczyszczenie uzwojeń 2. Izolacja starzenia |
Wniosek
silniki asynchroniczne, trójfazowe typ klatkowy są szeroko stosowane w gospodarce narodowej, jednak silniki takie mają szereg wad: nie ma płynna regulacja częstotliwości obrotów, wysokie prądy rozruchowe itp Jednak to wszystko można było uniknąć, gdyby zamiast użycia pierścienia poślizgu wirnika ..
Wirnik fazowy jest ułożony w odpowiedni sposób: uzwojenie trójfazowe umieszcza się w szczelinach wirnika (uzwojenie podobne do uzwojenia stojana); fazy uzwojenia wirnika są połączone gwiazdą; Początek faz połączony jest z trzema pierścieniami kontaktowymi wykonanymi z mosiądzu lub miedzi, które z kolei są mocowane na tym samym wale z wirnikiem. Odpowiednio pierścienie ślizgowe są izolowane od siebie i od wału. Metalowe grafitowe lub węglowe szczotki zamontowane na uchwycie szczotkowym zamontowanym na tarczy łożyska są dobrze dociśnięte do pierścieni kontaktowych.
Aby uruchomić silnik z wirnikiem fazowym, szczotki są podłączone do rezystorów nastawczych lub rozruchowych. Te same reostaty umożliwiają obniżenie prądu rozruchowego, ponieważ zwiększają uniwersalną rezystancję uzwojenia wirnika.
Reostaty służą do płynnego sterowania prędkością silnika, jak również do zmiany innych charakterystyk pracy.
Referencje
1. Projektowanie maszyn elektrycznych: Podręcznik dla uniwersytetów Książka 1. Edytowane przez Kopylov I.P. Moskwa: Energoatomizdat 1993. - 464 str.
2. Maszyny elektryczne: Maszyny asynchroniczne: Proc. Dla elektromecha. specjalne VUZ / Radin V.I., Bruskin D.E., Zorokhovich A. E.; Ed. I.P. Kopylov-M.: Higher School, 1988, -328 s.
Kuznetsov M.I. Podstawy elektrotechniki. Przewodnik do nauki. Ed. 10, poprawiony "Szkoła średnia"
Wykłady na samochody elektryczne
Silnik asynchroniczny rotor klatkowy (rys. 249 i 250) składa się z następujących głównych części: stojana z uzwojeniem trójfazowym, rotor klatkowy i szkielet. Rotor uzwojenia wykonany bezdotykowo (nie jest podłączony do żadnego zewnętrznego obwodu), co decyduje o wysokiej niezawodności tego silnika.
System magnetycznyMaszyna asynchroniczna w przeciwieństwie do maszyny DC, nie ma wyraźnych biegunów. Ten system magnetyczny jest nazywany niejawny polarny. Liczba biegunów w maszynie jest określona przez liczbę cewek w uzwojeniu stojana i obwód ich połączenia. W czterobiegunowej maszynie (ryc. 251) układ magnetyczny składa się z czterech identycznych gałęzi, połowa strumienia magnetycznego Φn jednego bieguna przechodzącego przez każdą, w maszynie dwubiegunowej są dwie takie gałęzie, sześć w sześciobiegunowej maszynie itp. Ponieważ wszystkie elementy układ magnetyczny przechodzi zmienny strumień magnetyczny, jest to nie tylko wirnik 1, ale
Ryc. 249. Silnik asynchroniczny ze zwartym wirnikiem: 1 - szkielet; 2 - stojan; 3 - wirnik; 4 - pręty uzwojenia wirnika; 5 - osłona łożyska; 6 - łopatki wentylacyjne wirnika; 7 - wentylator; 8 - skrzynka zaciskowa
 Ryc. 250 Obwód elektryczny silnik asynchroniczny z wirnikiem klatkowym (a) i jego konwencjonalnym obrazem graficznym (b): 1 - stojan; 2 - wirnik
Ryc. 250 Obwód elektryczny silnik asynchroniczny z wirnikiem klatkowym (a) i jego konwencjonalnym obrazem graficznym (b): 1 - stojan; 2 - wirnik
 Ryc.251. Pole magnetyczne czterobiegunowej maszyny asynchronicznej
Ryc.251. Pole magnetyczne czterobiegunowej maszyny asynchronicznej
 Ryc. 252. Arkusze wirnika (a) i stojana (b)
Ryc. 252. Arkusze wirnika (a) i stojana (b)
 Ryc. 253. Zbiornik ze stojanem (a) i stojanem z uzwojeniem (b)
Ryc. 253. Zbiornik ze stojanem (a) i stojanem z uzwojeniem (b)
a stojan 2 wykonany jest z blach stalowych elektrycznych (rys. 252), odizolowanych od siebie izolacyjną powłoką lakieru, wagą itp. W wyniku tego zmniejsza się szkodliwy wpływ prądów wirowych powstających w stali stojana i wirnika podczas obrotu pola magnetycznego. Arkusz stojana i wirnika ma rowki w postaci otwartej, półzamkniętej lub zamkniętej, w której znajdują się przewodniki odpowiednich zwojów. W stojanie najczęściej stosowane półotwarte rowki o kształcie prostokątnym lub owalnym, w maszynach dużej mocy - otwarte rowki o prostokątnym kształcie.
Rdzeń 1 stojana (ryc. 253, a) wciska się w rdzeń odlewu 3 i wzmacnia za pomocą śrub blokujących. Rdzeń wirnika jest dociskany do wału wirnika, który obraca się w łożyskach kulkowych zainstalowanych w dwóch tarczach łożyskowych. Szczelina powietrzna między stojanem a wirnikiem ma minimalny rozmiar dopuszczalny pod względem dokładności montażu i sztywności mechanicznej. W silnikach o małej i średniej mocy szczelina powietrzna wynosi zwykle kilka dziesiątych części milimetra. Ta szczelina zapewnia zmniejszenie oporu magnetycznego obwodu magnetycznego maszyny, a w konsekwencji zmniejszenie prądu magnesowania wymaganego do wytworzenia strumienia magnetycznego w silniku. Zmniejszenie prądu magnesowania zwiększa współczynnik mocy silnika.
Uzwojenie stojana. Wykonany jest w postaci szeregu zwojów drutu o przekroju okrągłym lub prostokątnym. Przewody w rowkach są połączone, tworząc serię cewek 2 (Rys. 253, b). Cewki są podzielone na identyczne grupy według liczby faz, które są rozmieszczone symetrycznie wzdłuż obwodu stojana (ryc. 254, a) lub wirnika. W każdej takiej grupie wszystkie cewki są połączone elektrycznie, tworząc jedną fazę uzwojenia, to jest oddzielną obwód elektryczny. W przypadku dużych wartości prądu fazowego lub, w razie potrzeby, przełączanie poszczególnych cewek fazy może mieć kilka równoległych odgałęzień. Najprostszym elementem uzwojenia jest cewka (Rys. 254, b), składająca się z dwóch przewodów 1 i 2, umieszczonych w rowkach w pewnej odległości od siebie
 Ryc. 254. Lokalizacja cewek uzwojenia trójfazowego na stojanie silnika indukcyjnego (a) i cewka dwóch przewodów (b)
Ryc. 254. Lokalizacja cewek uzwojenia trójfazowego na stojanie silnika indukcyjnego (a) i cewka dwóch przewodów (b)
y Odległość ta jest w przybliżeniu równa jednemu podziałowi biegunowemu, m, przez co rozumiemy długość łuku odpowiadającą jednemu biegunowi.
Zwykle cewki utworzone przez przewodniki leżące w tych samych rowkach są połączone w jedną lub dwie cewki. Czasami nazywa się je sekcjami. Układa się je w taki sposób, aby w każdej z nich znajdował się jeden bok cewki lub dwa boki, jeden nad drugim. Zgodnie z tym wyróżniono jedno i dwuwarstwowe uzwojenia. Głównym parametrem określającym rozkład uzwojenia w rowkach jest liczba szczelin q na biegun i fazę.
W uzwojeniu stojana dwubiegunowego silnika (patrz rys. 254, a), każda faza (A - X, BY; CZ) składa się z trzech cewek, których boki są umieszczone w trzech sąsiednich rowkach, tj. Q = 3. Zwykle q\u003e 1 takie uzwojenie nazywa się dystrybuowane.
Najbardziej rozpowszechnione dwuwarstwowe uzwojenia. Ich sekcje 1 (rys. 255, a) są umieszczone w szczelinach 2 stojana w dwóch warstwach. Uzwojenia stojana są wzmocnione w rowkach z klapami tekstolitycznymi 5 (rys. 255, b), które układa się w głowach zębów.
Ścianki rowka są pokryte materiałem izolacyjnym z arkusza 4 (płyta ogniowa, tkanina lakierowana itp.). Przewody leżące w rowkach są połączone ze sobą w odpowiedni sposób od przednich stron maszyny. Łączące je przewody są wywoływane części czołowe. Ponieważ części czołowe nie uczestniczą w indukcji e. D. s, działają tak krótko, jak to możliwe.
Poszczególne cewki uzwojenia stojana można połączyć za pomocą "gwiazdy" lub "trójkąta". Początek i końce zwojów każdej fazy prowadzą do sześciu zacisków silnika.
Nawijanie wirnika. Uzwojenie wirnika wykonane jest w postaci klatki wiewiórkowej (rys. 256, a). Wykonany jest z prętów miedzianych lub aluminiowych, zwieńczonych końcami dwoma pierścieniami (ryc. 256, b). Rdzenie tego uzwojenia są wprowadzane w rowki wirnika bez izolacji, ponieważ napięcie w zwartym uzwojeniu wirnika wynosi zero.
 Ryc. 255. Dwuwarstwowe uzwojenie stojana silnika asynchronicznego: 1 - przekrój; 2 - groove; 3 - przewodnik; 4 - materiał izolacyjny; 5 - klin; 6 - bolec
Ryc. 255. Dwuwarstwowe uzwojenie stojana silnika asynchronicznego: 1 - przekrój; 2 - groove; 3 - przewodnik; 4 - materiał izolacyjny; 5 - klin; 6 - bolec
 Ryc. 256. Klatka wiewiórki: a - klatka wiewiórki; b - wirnik z klatką wiewiórkową z prętów; in - wirnik z klatką wiewiórkową; 1 - pierścienie zwierające; 2 pręty; 3-wały; 4 - rdzeń wirnika; 5 - ostrza wentylacyjne; 6 - pręty z odlewów celulozowych
Ryc. 256. Klatka wiewiórki: a - klatka wiewiórki; b - wirnik z klatką wiewiórkową z prętów; in - wirnik z klatką wiewiórkową; 1 - pierścienie zwierające; 2 pręty; 3-wały; 4 - rdzeń wirnika; 5 - ostrza wentylacyjne; 6 - pręty z odlewów celulozowych
Rowki zwartego wirnika są zwykle wykonywane na półzamknięte, aw maszynach o małej mocy są zamknięte (rowek ma stalową obręcz oddzielającą ją od szczeliny powietrznej). Ten kształt rowka pozwala na dobre wzmocnienie przewodów uzwojenia wirnika, choć nieznacznie zwiększa jego indukcyjność.
W silnikach o mocy do 100 kW pręty klatkowe są zwykle produkowane poprzez wlewanie stopionego aluminium do rowków rdzenia wirnika (ryc. 256, c). Wraz z prętami klatki wiewiórki, końcowe pierścienie zwarciowe łączące je również są odlewane.
Aluminium nadaje się do tego celu, ponieważ ma niską gęstość, wystarczająco wysokie przewodnictwo elektryczne i łatwo topi się.
Zazwyczaj silniki mają zamontowane wentylatory na wale wirnika. Przeprowadzają wymuszoną wentylację ogrzewanych części maszyny (uzwojenia i stal stojana i wirnika), pozwalając im uzyskać więcej mocy z silnika. W silnikach ze zwartym wirnikiem łopatki wentylatora są często odlane razem z bocznymi pierścieniami klatki wiewiórki (patrz rys. 256, c).
Silniki asynchroniczne z wirnikiem klatkowym są proste w budowie, niezawodne w działaniu. Są one szeroko stosowane do napędzania maszyn do obróbki metalu i innych urządzeń, które zaczynają pracować bez obciążenia. Jednakże względnie mały moment rozruchowy dla tych silników i duży prąd rozruchowy nie pozwalają na ich wykorzystanie do napędzania takich maszyn i mechanizmów, które muszą być używane natychmiast pod dużym obciążeniem (przy dużych obciążeniach). moment rozpoczęcia). Maszyny te obejmują urządzenia podnoszące, kompresory itp.
Możliwe jest zwiększenie początkowego momentu obrotowego i zmniejszenie prądu rozruchowego podczas wykonywania klatki wiewiórki o zwiększonej oporności. W tym przypadku silnik będzie miał zwiększony poślizg i duże straty mocy w uzwojeniu wirnika. Takie silniki nazywane są silnikami wysokopoślizgowymi (oznaczonymi jako AC). Mogą być używane do napędzania maszyn działających stosunkowo krótko. Na e. str. Silniki prądu przemiennego (z poślizgiem do 10%) są używane do napędzania sprężarek, które działają okresowo przez krótki czas, gdy ciśnienie w zbiornikach powietrznych spada poniżej pewnej granicy.
Silniki o wysokim momencie rozruchowym.Zwarte asynchroniczne silniki ze zwiększonym momentem rozruchowym mają specjalną konstrukcję wirnika (wskazaną przez AP). Należą do nich silniki klatkowe i silniki z głębokim gniazdem.
Wirnik 3 (rys. 257, a) silnika z podwójną klatką wiewiórkową ma dwa zwarte uzwojenia. Zewnętrzna klatka 1 jest początkowa. Ma duże aktywne i mało reaktywne opory. Wewnętrzna klatka 2 jest głównym uzwojeniem wirnika; przeciwnie, ma nieznaczne aktywne i duże reaktywne opory. W początkowym momencie rozruchu prąd przepływa głównie przez zewnętrzną komórkę, co powoduje znaczny moment obrotowy. Wraz ze wzrostem prędkości obrotowej prąd przechodzi do komórki wewnętrznej, a na końcu procesu rozruchu maszyna działa normalnie zwarty silnik z jedną (wewnętrzną) komórką. Przemieszczenie prądu do zewnętrznej komórki w początkowym momencie uruchomienia jest wyjaśnione działaniem, np. d. indukcja indukcyjna indukowana w przewodach wirnika. Im niższy przewodnik znajduje się w wyżłobieniu, tym większy strumień magnetyczny rozpraszania 6, który obejmuje i tym większy e. d. indukowana jest w ten sposób indukcja własna (ryc. 257, c), tym bardziej, że będzie ona miała oporność indukcyjną.
Przemieszczenie prądu do górnych przewodników wirnika ma duży wpływ, gdy wirnik jest nieruchomy, gdy częstotliwość prądu indukowanego w obu komórkach wirnika jest duża. Jednocześnie rezystancje indukcyjne obu ogniw są znacznie bardziej aktywne, a prąd jest rozdzielany między nimi w odwrotnej proporcji do ich rezystancji indukcyjnych, tj. Przechodzi głównie wzdłuż zewnętrznej komórki o wysokiej rezystancji czynnej.
Gdy prędkość wirnika wzrasta, częstotliwość wirnika w nim będzie się zmniejszać (wirujące pole magnetyczne będzie przecinane przez przewodniki wirnika przy niższej częstotliwości), a prąd zacznie przepływać przez obie komórki zgodnie z ich oporem, tj. Głównie przez wewnętrzną komórkę. .
Tak więc proces uruchamiania silnika z podwójną klatką wiewiórkową przypomina proces uruchamiania silnika indukcyjnego z wirnikiem fazowym, gdy na początku rozruchu do obwodu uzwojenia wirnika wprowadzany jest dodatkowy opór (wyjściowy reostat), a gdy przyspiesza, ta rezystancja jest wyprowadzana. Podobnie, w omawianym silniku, na początku rozruchu, prąd przepływa przez zewnętrzną komórkę z wysoką opornością, a następnie, gdy przyspiesza, stopniowo przechodzi do wnętrza komórki z niskim oporem.
Ryc. 257. Konstrukcja wirników silników asynchronicznych o zwiększonym momencie rozruchowym: z podwójną klatką wiewiórkową (a), z głębokimi rowkami (b) i nacięciami ich rowków (cid)
Aby zwiększyć aktywną rezystancję celi początkowej, pręty wykonane są z mosiężnego mosiądzu lub brązu. Rdzenie komory roboczej wykonane są z miedzi o niskiej rezystancji właściwej, a ich pole przekroju poprzecznego jest większe niż w komórce początkowej. W rezultacie aktywna oporność komórki początkowej wzrasta 4-5 razy w porównaniu z działającą. Pomiędzy prętami obu komórek znajduje się wąska szczelina 5, której wymiary określają indukcyjność działającej komórki. Silnik dwukomorowy jest o 20-30% droższy od silnika z zwarciem o konwencjonalnej konstrukcji. Aby uprościć technologię produkcji wirnika, silniki dwukomorowe o małej i średniej mocy są wykonane z klatką z odlewu aluminiowego.
Działanie silników z głębokimi rowkami (Rys. 257, b) opiera się również na wykorzystaniu zjawiska przemieszczenie prądu. W tych silnikach 4 pręty klatkowe są wykonane w postaci wąskich szyn miedzianych osadzonych w głębokich rowkach wirnika 3 (wysokość rowka jest 10 do 12 razy większa od jego szerokości). Niższe warstwy prętów położonych dalej od powierzchni wirnika są pokryte znacznie większą liczbą linii strumienia magnetycznego 6 niż górne (Rys. 257, d), dlatego mają one wielokrotnie wyższą indukcyjność. Na początku rozruchu, w wyniku zwiększonej oporności indukcyjnej dolnych części prętów, prąd przechodzi głównie przez ich górne części. W tym przypadku stosuje się tylko niewielką część przekroju każdego pręta, co prowadzi do zwiększenia jego aktywnego oporu, a w konsekwencji do zwiększenia aktywnego oporu całego uzwojenia wirnika.
Wraz ze wzrostem prędkości wirnika, obecne przemieszczenie w górnych częściach prętów zmniejsza się (z tego samego powodu, co w silniku z podwójną klatką wiewiórkową), a po zakończeniu rozruchu prąd jest równomiernie rozłożony na ich polu przekroju poprzecznego.
Silnik asynchroniczny z wirnikiem klatkowym (AD C KZR)
Urządzenia, które zamieniają energię elektryczną (wejście) na mechaniczne (wyjście), są wywoływane silniki elektryczne .
Energia mechaniczna jest niezbędna do działania maszyn produkcyjnych i mechanizmów.
PIEKŁO jest od stojana (część stała) i wirnika (część ruchoma).
Stator obejmuje: obudowę; rdzeń magnetyczny (rdzeń), składający się z cienkich blach stalowych; trzy uzwojenia (cewki), przesunięte między sobą na 120 °, które utrzymują się w rowkach przewodu magnetycznego.
Wchodzi się w wirnik: wał, przewód magnetyczny, zwarcie (w postaci klatki wiewiórki).
Symbol
Wirnik jest połączony z mechanizmem produkcyjnym, który jest obciążeniem silnika.
Zalety silnika: proste, tanie, niezawodne.
Wady:słabe właściwości rozruchowe, tj. mały moment rozruchowy, wysoki prąd rozruchowy i zużycie prądu biernego z sieci.
ZASADA PRACY
U 1 → Ja 1 → F 1 (wirujące pole magnetyczne)→ E 2 (E 1 ) → Ja 2
W wyniku interakcji I 2 z F powstaje moment M [Nm]
M = DoJa 2 Fcosψ 2,
gdzie ψ 2 jest przesunięciem fazowym między E 2 i I 2, pod działaniem którego rotor wpada w ruch obrotowy.
Asynchroniczność (odmienność) obrotu pola magnetycznego n 1 i wirnika n 2 ma miejsce w AD. Z powodu tego asynchronicznego ruchu, procesy elektryczne zachodzą w wirniku (E 2 i I 2). Wartość asynchroniczności jest szacowana przez poślizg S, w jednostkach względnych lub w procentach:
![]() ,
[%],
,
[%],
n 1 to częstotliwość obrotu pola magnetycznego.
P p - liczba par biegunów magnetycznych pola: 1, 2, 3 ... i tak dalej;
f - częstotliwość prądu.
Jeśli fn = 50 Hz, to = 3000, 1500.1000 obr / min itp., W zależności od liczby par biegunów silnika.
Od (1) mamy ![]() .
.
Silnik zaczyna się od n 2 = 0 (start), następnie
(maksymalny poślizg).
Teoretycznie, maksymalna częstotliwość obrotów wirnika bez obciążenia n 2 = n 1, a następnie
Zakres zmian S wynosił od 1 (minimalna prędkość wirnika) do 0 (maksymalna prędkość wirnika).
CHARAKTERYSTYCZNE PIEKŁO MECHANICZNE -główna charakterystyka ciśnienia krwi, pokazująca, jak zmienia się prędkość wirnika pod działaniem obciążenia. Ta charakterystyka może być uzyskana operacyjnie lub obliczona według wzorów:
 (1)
(1)
W formułach (1) i (2) S można znaleźć n.
Biorąc pod uwagę obciążenie M, możemy znaleźć poślizg, a zatem n 2.
Ta charakterystyka mechaniczna to:
|
|
|
Na charakterystykę można zidentyfikować 4 główne punkty i odpowiednio 3 działki. Rozważ następujące punkty:
1 - na biegu jałowym (silnik obraca się bez obciążenia).
Współrzędne tego punktu (n 2 = n 1, M = 0);
2 - tryb nominalny - występuje, gdy obciążenie jest równe maksymalnemu dopuszczalnemu w warunkach długotrwałej pracy.
Współrzędne tego punktu (n 2 = n, M = M nom) wskazano w paszporcie;
3 - obciążenie krytyczne, przy którym silnik rozwija maksymalny moment obrotowy.
Współrzędne tego punktu (S cr lub n cr; M = M max = M cr).
Z obciążeniem bardziej krytycznego silnika nie można sobie z nim poradzić, co prowadzi do zatrzymania;
4 - punkt startowy, od tego momentu zaczyna się silnik.
Współrzędne tego punktu (n 2 = 0, M = M p)
Wszystkie współrzędne można znaleźć na danych paszportu silnika.
Działki 1-3 - stabilna praca przy obciążeniu silnika od 0 do M kr silnik ma możliwość dostosowania się do obciążenia i zwiększenia momentu (siły), co nie zatrzymuje silnika.
3-4 - charakteryzuje rozruch silnika, praca w tym obszarze jest niestabilna.
Dzięki temu:
1-2 - możliwa długotrwała eksploatacja, w której prąd pobierany z sieci nie przekracza maksymalnej dopuszczalnej, tj. nominalnej.
2-3 - dozwolone jest tylko krótkotrwałe działanie, ponieważ przy takich obciążeniach silnika I\u003e I pan i silnik mogą się przegrzać.
CHARAKTERYSTYKA MECHANICZNA n = f (M), otrzymany w nominalnych warunkach pracy, tj. przy U = U nom, f = f nom i naturalny wzór Włącza się (bez dodatkowych elementów) NATURALNY.
REGULACJA PRĘDKOŚCI ADP Z CZR
Jak wynika z formuły
![]()
na szybkość można wpływać przez zmianę częstotliwości obrotu pola magnetycznego
Zmieniając częstotliwość napięcia zasilającego f 1 (stosując specjalne konwertery) lub zmieniając liczbę par biegunów P n (zmieniając schemat cewek stojana).
W obu przypadkach wielkość poślizgu pozostaje prawie niezmieniona.
Prędkość obrotową silnika można również zmienić, działając na poślizg S. Można to zrobić zmieniając napięcie zasilające silnik lub zmieniając opór wirnika (jeśli pozwala na to konstrukcja wirnika).
CHARAKTERYSTYKA MECHANICZNAUzyskany w warunkach pracy innych niż nominalne, jest nazywany SZTUCZNE.
Rozważ te sposoby.
WPŁYW CZĘSTOTLIWOŚCIf PRZY PRĘDKOŚCI POJAZDU

Z teorii maszyn wynika, że aby zapewnić sprawne działanie silnika z regulacją częstotliwości, należy zmienić przy zmianie f i napięcia wejściowego tak, aby stosunek U / f pozostawał stały. Oczywiście ten warunek może być spełniony tylko wtedy, gdy f spada.<50 Гц, потому что уменьшение напряжения U
Przy wzroście f\u003e 50 Hz napięcie U\u003e U nom powinno być proporcjonalnie zwiększone, jednak jest to niedopuszczalne ze względu na warunki pracy silnika. Ta okoliczność wpłynie na kształt charakterystyki mechanicznej.
Należy zauważyć, że w każdym przypadku, gdy zmienia się f, zmieni się także częstotliwość obrotu pola magnetycznego (to znaczy położenie punktu n1 na charakterystyka mechaniczna). Zatem położenie punktu n1 może być punktem odniesienia w obrazie sztucznych właściwości mechanicznych.
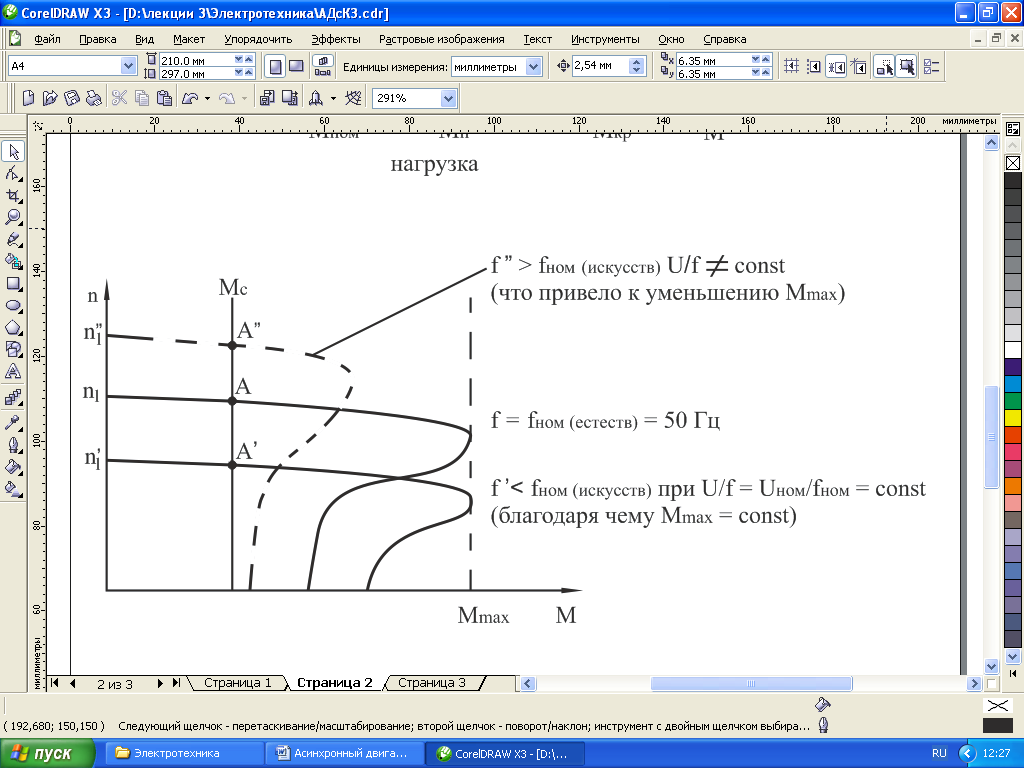
Jeśli podamy mechaniczną charakterystykę mechanicznej charakterystyki mechanizmu (niech M c = const, gdzie M c jest momentem oporu), wówczas możemy oszacować zakres regulacji prędkości przy regulacji częstotliwości, gdzie A, A ", A" są punktami roboczymi uzyskanymi pod warunkiem M f = M z.
Zalety metody częstotliwości kontrolowania prędkości ciśnienia krwi: płynność regulacji: płynna zmiana f, otrzymujemy dużą liczbę sztucznych cech, a zatem prędkości; duży zakres regulacji z regulacją w górę iw dół od nominalnej (regulacja dwustrefowa).
Wady: konieczność zainstalowania przetwornicy częstotliwości, co znacznie zwiększa koszt napędu elektrycznego.
ROZPORZĄDZENIE POLAROWEzapewnia możliwość zmiany liczby par biegunów P p. Ta metoda jest możliwa tylko dla silników asynchronicznych specjalnych - wielobiegowych, i jest uzyskiwana przez przełączanie poszczególnych sekcji tworzących cewkę stojana od połączenia szeregowego do równoległego lub odwrotnie, a także liczbę par biegunów w szeregu połączenie więcej niż 2 razy niż z równoległym, tj. P n ostatnim = 2P n paral. i dlatego ![]() .
.
Oczywiste jest, że położenie punktu n 1 na charakterystyce mechanicznej zmieni się 2-krotnie.
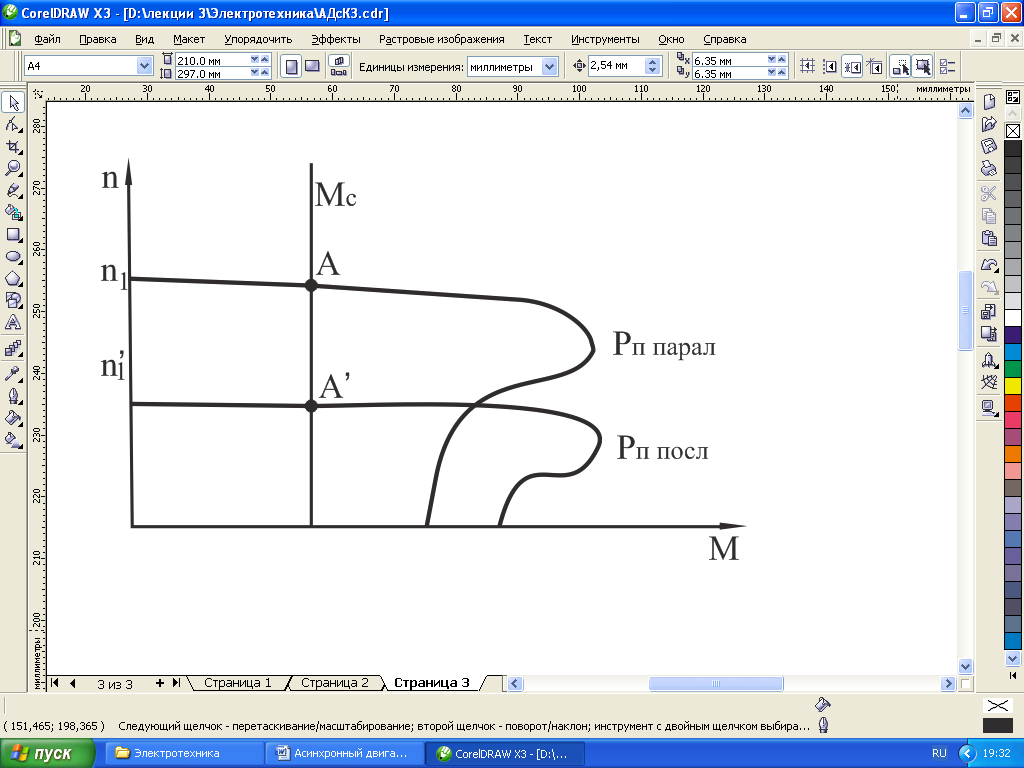
Zalety regulacji słupów: łatwość implementacji, brak specjalnych urządzeń konwertujących w obwodzie mocy silnika.
Wady: nierówność przy regulacji, mały zakres regulacji.
REGULACJA PRĘDKOŚCI PRZEZ ZMIANA WARTOŚCI NAPIĘCIA DOSTAWYU
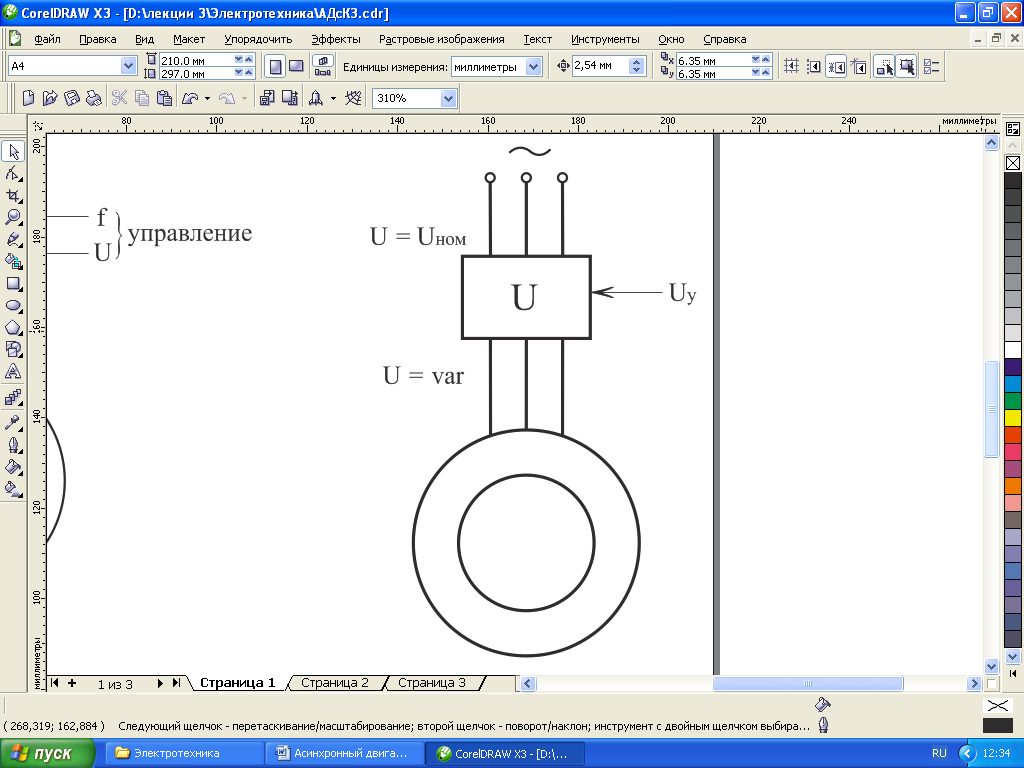
Dzięki tej metodzie częstotliwość obrotu pola magnetycznego () pozostaje stała, a częstotliwość rotacji wirnika zmienia się z powodu przesuwania. Można to wytłumaczyć faktem, że przy zmniejszeniu napięcia zasilania jest silnie (zależność kwadratowa) zmniejsza M silnika, który przy tym samym obciążeniu prowadzi do zmniejszenia prędkości, aw konsekwencji do poślizgu. Przy konstruowaniu sztucznych właściwości mechanicznych, wynika z faktu, że punkt n 1, który odpowiada częstotliwości obrotu pola magnetycznego, nie zmienia się, napięcie U można zmienić tylko w dół, a w konsekwencji momenty M p i M max maleją, ponieważ M ~ U 2.
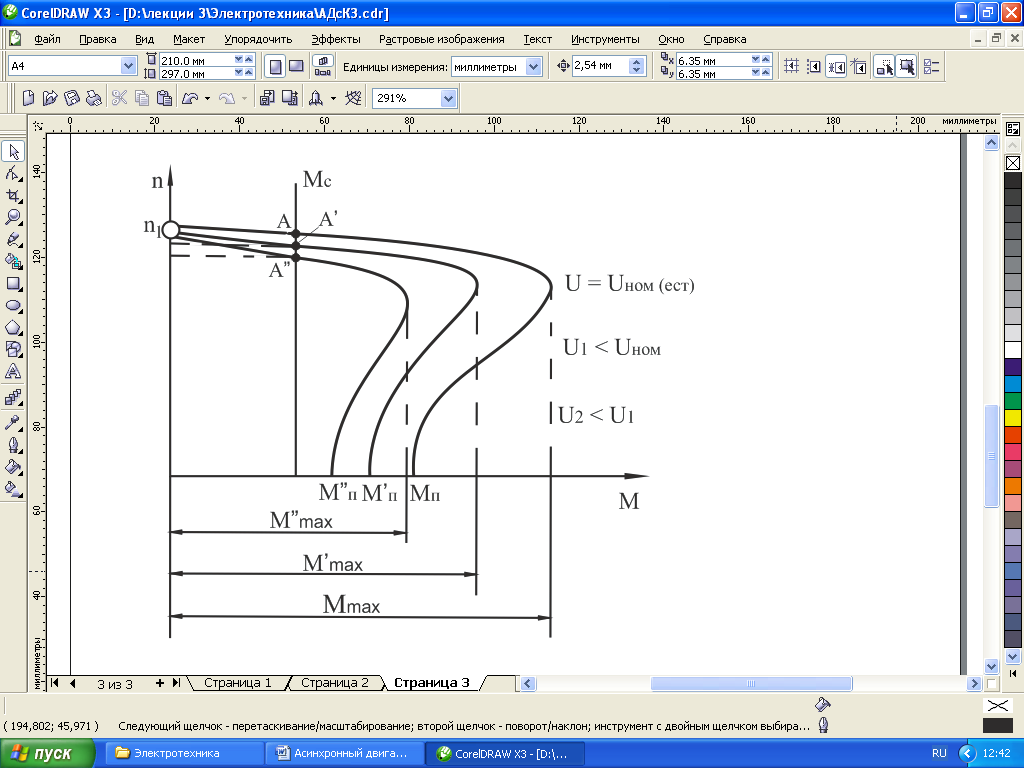
Wada: mały zakres regulacji prędkości (szacunki prędkości podczas pracy w punktach A, A ", A"). Dlatego ta metoda regulacji jest rzadko używana.