Прямой пуск возможен, когда сеть
мощная и пусковой ток АД не вызывает
недопустимо больших падений напряжения
в сети (не более
).
Три способа пуска при пониженном
напряжении.
Они применяются, если по
условию допустимого падения напряжения
в сети прямой пуск невозможен, и обладают
одинаковым недостатком – уменьшением
пускового момента ( ).
).
Поэтому эти способы реализуются, когда возможен пуск АД на холостом ходу или под неполной нагрузкой, что чаще встречается у мощных высоковольтных двигателей.
Реакторный пуск (рис.2.15). Сначала включается В1 . Напряжение
|
|
Сопротивление реактора x p выбирается таким образом, чтобы напряжение на фазе обмотки статора было не менее 65% номинального.
После достижения АД установившейся частоты вращения включается выключатель В2 , который шунтирует реактор Р , в результате чего на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора.
Пусковой ток при реакторном
пуске равен
 и уменьшился по сравнению с пусковым
током при прямом пуске в
и уменьшился по сравнению с пусковым
током при прямом пуске в
 раз.
раз.
Во столько же раз уменьшается напряжение на клеммах обмотки статора в начальный момент пуска.
Начальный пусковой момент при
реакторном пуске
 уменьшается по сравнению с начальным
пусковым моментом при прямом пуске
уменьшается по сравнению с начальным
пусковым моментом при прямом пуске
 в
в
 раз.
раз.
В приведенных соотношениях не
учитывается изменение величины
 при пуске. При необходимости это нетрудно
сделать.
при пуске. При необходимости это нетрудно
сделать.
Автотрансформаторный пуск (рис.2.16). Сначала включаются В1 и
|
|
 напряжение.
напряжение.
После достижения АД установившейся частоты вращения выключатель В2 отключается и на обмотку статора подается напряжение через часть обмотки АТ, который в этом случае работает как реактор. Затем включается В3 , и на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора.
Если пусковой автотрансформатор
понижает пусковое напряжение АД в
 раз (-
коэффициент трансформации
автотрансформатора), то пусковой ток
АД и ток на низкой стороне автотрансформатора
уменьшатся также в
раз. Пусковой момент M
П
,
пропорциональный квадрату напряжения
на клеммах обмотки статора АД, уменьшится
в
раз (-
коэффициент трансформации
автотрансформатора), то пусковой ток
АД и ток на низкой стороне автотрансформатора
уменьшатся также в
раз. Пусковой момент M
П
,
пропорциональный квадрату напряжения
на клеммах обмотки статора АД, уменьшится
в
 раз.
раз.
Пусковой ток на высокой стороне автотрансформатора и ток в сети уменьшатся также в раз.
Таким образом, при автотрансформаторном пуске пусковой момент АД и пусковой ток в сети уменьшаются в одинаковое число раз. При реакторном пуске пусковой ток АД является также пусковым током в сети, а пусковой момент M П уменьшается быстрее пускового тока. Поэтому при одинаковых значениях пускового тока в сети при автотрансформаторном пуске пусковой момент будет больше.
Несмотря на это преимущество автотрансформаторного пуска перед реакторным, достигнутое ценой значительного усложнения и удорожания пусковой аппаратуры, этот пуск применяется реже реакторного в том случае, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением “звезда-треугольник” (рис.2.17).
|
|
Для его применения необходимо, чтобы были выведены все шесть клемм обмотки статора, линейное напряжение сети равно номинальному фазному напряжению обмотки статора.
В первый момент пуска обмотка статора соединена в “звезду”, а при достижении устойчивой частоты вращения схема соединения обмотки изменяется переключателем П на “треугольник”.
При таком способе пуска на фазы
обмотки статора подается напряжение
уменьшенное в раз по сравнению с
номинальным, пусковой момент уменьшается
в 3 раза, пусковой ток в фазах уменьшается
в
 раз, а пусковой ток в сети в 3 раза. Таким
образом, рассматриваемый способ пуска
равноценен автотрансформаторному пуску
при
раз, а пусковой ток в сети в 3 раза. Таким
образом, рассматриваемый способ пуска
равноценен автотрансформаторному пуску
при
 ,
однако при пусковых переключениях
возникают коммутационные перенапряжения
в обмотке статора АД.
,
однако при пусковых переключениях
возникают коммутационные перенапряжения
в обмотке статора АД.
|
|
Начальный пусковой момент может
быть увеличен до максимального момента
двигателя
 при
определенном сопротивлении пускового
реостата
при
определенном сопротивлении пускового
реостата
 ,
рис.2.19. Величину сопротивления пускового
реостата
,
рис.2.19. Величину сопротивления пускового
реостата
 можно определить приравняв критическое
скольжение единице, т.е.
можно определить приравняв критическое
скольжение единице, т.е.
Приведенное активное сопротивление фазы пускового реостата .
Действительное сопротивление пускового реостата .
Обычно выбирают .
По мере увеличения частоты вращения
ротора сопротивление пускового реостата
уменьшают, переходя с одной его ступени
на другую. Ступени пускового реостата
рассчитывают так, чтобы при переключениях
вращающий момент превышал статический
момент.
.
По мере увеличения частоты вращения
ротора сопротивление пускового реостата
уменьшают, переходя с одной его ступени
на другую. Ступени пускового реостата
рассчитывают так, чтобы при переключениях
вращающий момент превышал статический
момент.
Частота вращения ротора АД . Из этого выражения следует, что частоту вращения ротора можно регулировать изменением какой-либо из трех величин: скольжения s , частоты тока в обмотке статора f 1 , числа полюсов обмотки статора 2p.
Регулирование частоты вращения изменением скольжения происходит только у нагруженного АД. В режиме холостого хода скольжение, а следовательно и частота вращения ротора остаются практически неизменными.
Оценку любого способа регулирования частоты вращения производят по следующим показателям:
1. Возможному диапазону регулирования;
2. Плавности регулирования;
3. Изменению КПД привода при регулировании.
Регулирование частоты вращения изменением подводимого напряжения. Вращающий момент АД пропорционален U 1 2 , поэтому механические характеристики двигателя при напряжениях меньших номинального (рис.2.20) располагаются ниже естественной.
Если статический момент M СТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается.
|
|
 .
.
Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения.
С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД.
С уменьшением напряжения U 1 двигатель утрачивает перегрузочного способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД.
Узкий диапазон регулирования и неэкономичность ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения
нарушением симметрии подводимого
напряжения.
При нарушении симметрии
трехфазной системы переменного
напряжения, подводимой к АД, вращающееся
магнитное поле статора становится
эллиптическим. Такое поле содержит
обратную составляющую (встречное поле),
которая создает момент
 ,
направленный встречно вращающему
моменту M ПР, поэтому
результирующий электромагнитный момент
АД уменьшается:
,
направленный встречно вращающему
моменту M ПР, поэтому
результирующий электромагнитный момент
АД уменьшается:
![]() .
.
Механические характеристики двигателя в этом случае (рис.2.21,а) располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) – пределом несимметрии трехфазного напряжения.

Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатора АТ (рис.2.21,б).
Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен лишь в АД с фазным ротором. В цепь ротора включается регулировочный реостат, подобный пусковому, но рассчитанный на длительный режим работы. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным или ступенчатым.
Механические характеристики АД при различных значениях активного сопротивления цепи ротора (рис.2.22) показывают, что с увеличением активного сопротивления цепи ротора возрастает скольжение, соответствующее заданному статическому моменту. Частота вращения ротора при этом уменьшается.

Способ обеспечивает регулирование частоты вращения в широком диапазоне вниз от синхронной частоты вращения. Электрические потери в цепи ротора возрастают, но только из-за потерь в регулировочном реостате. Этот способ более благоприятный по сравнению с предыдущим, несмотря на снижение КПД двигателя.
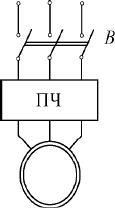
Регулирование частоты вращения
изменением частоты тока в обмотке
статора
(рис.2.23).
Это способ
регулирования основан на изменении
синхронной частоты вращения
 ,
что возможно при наличии источника
питания АД с регулируемой частотой –
преобразователя частоты (ПЧ). Частотное
регулирование позволяет плавно изменять
частоту вращения ротора в широком
диапазоне (до 12:1).
,
что возможно при наличии источника
питания АД с регулируемой частотой –
преобразователя частоты (ПЧ). Частотное
регулирование позволяет плавно изменять
частоту вращения ротора в широком
диапазоне (до 12:1).
Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1 , но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f 1 изменять и величину подводимого к обмотке статора напряжения U 1 .
|
|
где
 и
и
 - напряжение и момент при частоте
- напряжение и момент при частоте
 ;
;
 и
и
 -
напряжение и момент при частоте
-
напряжение и момент при частоте
 .
.
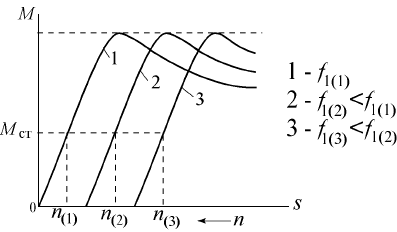
Если частота вращения ротора АД
регулируется при постоянном моменте
нагрузки ( ),
то подводимое к обмотке статора напряжение
необходимо изменять пропорционально
изменению частоты тока (рис.2.24):
),
то подводимое к обмотке статора напряжение
необходимо изменять пропорционально
изменению частоты тока (рис.2.24):
При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частоты f 1 остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения.
Если регулирование производится
при условии постоянства мощности
двигателя ( ),
то подводимое напряжение к обмотке
статора следует изменять в соответствии
с законом (рис.2.25)
),
то подводимое напряжение к обмотке
статора следует изменять в соответствии
с законом (рис.2.25)
![]()
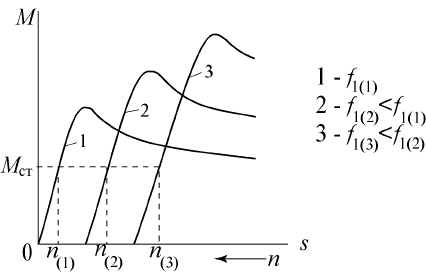
Рис.
2.25
Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение.
Принцип преобразования четырехполюсной обмотки в двухполюсную на примере одной фазы показан на рис.2.26: а) при последовательном согласном соединении двух катушек создаваемое ими магнитное поле образует четыре полюса; б) при последовательном встречном соединении – два полюса; в) при параллельном соединении – два полюса.
АД с полюсно-переключаемыми
обмотками могут работать в двух режимах:
режим постоянного момента (рис.2.27), когда
при переключении обмотки статора с
одной полюсности на другую вращающий
момент на валу двигателя M
2
остается неизменным, а мощность P
2
изменяется пропорционально частоте
вращения ротора
 ;
;
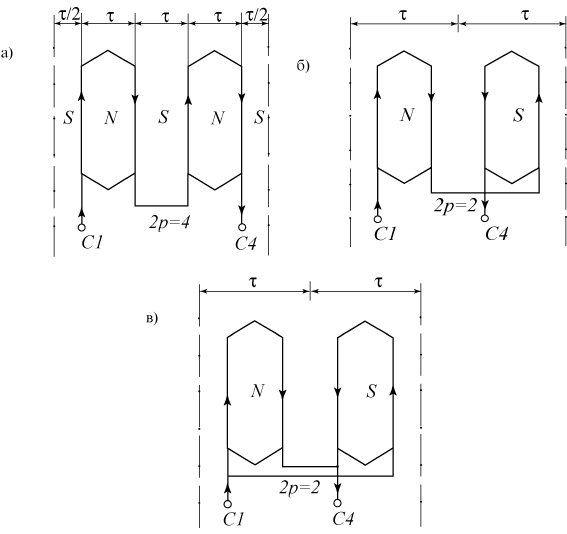

режим
постоянной мощности
(рис.2.28), когда
при переключении обмотки статора с
одной полюсности на другую мощность P
2
остается примерно одинаковой, а момент
на валу M
2
изменяется соответственно изменению
частоты вращения ротора
 .
.
Регулирование частоты вращения изменением числа полюсов обмотки статора применяют только в АД с короткозамкнутым ротором, потому что в АД с фазным ротором пришлось бы и на роторе применить полюсно-переключаемую обмотку, а это привело бы к недопутимому усложнению двигателя.
Регулирование частоты вращения введением в цепь ротора добавочной ЭДС. В цепь ротора вводят от постороннего источника добавочную ЭДС, имеющую частоту, одинаковую с основной ЭДС ротора, и направленную согласно или встречно с ней.
Учитывая, что скольжение АД
относительно невелико, для упрощения
происходящих процессов можно принять,
что
 ,
,
 ,
,
 .
Рассматриваем работу АД при
.
Рассматриваем работу АД при
 .
.
Если
 ,
то
,
то
 и
и
 .
В обмотке вращающегося ротора до введения
добавочной ЭДС индуктируется ЭДС
.
В обмотке вращающегося ротора до введения
добавочной ЭДС индуктируется ЭДС
 и протекает ток
и протекает ток
 ,
создающий необходимый вращающий
электромагнитный момент. Векторная
диаграмма для рассматриваемой ситуации
изображена на рис.2.29,а.
,
создающий необходимый вращающий
электромагнитный момент. Векторная
диаграмма для рассматриваемой ситуации
изображена на рис.2.29,а.
При введении в цепь вращающегося
ротора добавочной ЭДС
 ,
направленной встречно ЭДС
,
направленной встречно ЭДС
 ,
ток в обмотке ротора в первый момент
времени уменьшится. В результате
вращающий электромагнитный момент М
станет меньше статического момента
,
ток в обмотке ротора в первый момент
времени уменьшится. В результате
вращающий электромагнитный момент М
станет меньше статического момента
 ,
и ротор начнет замедлять свою частоту
вращения.
,
и ротор начнет замедлять свою частоту
вращения.

С уменьшением частоты вращения
ротора будут увеличиваться скольжение,
ЭДС и ток в обмотке ротора. Увеличение
тока в обмотке ротора и уменьшение
частоты вращения ротора будут происходить
до тех пор пока этот ток при новом
скольжении
 не достигнет прежнего значения
не достигнет прежнего значения
 ,
при котором выполнялось равенство
моментов
,
при котором выполнялось равенство
моментов
 .
Новому значению частоты вращения ротора
соответствует векторная диаграмма на
рис.2.29,б.
.
Новому значению частоты вращения ротора
соответствует векторная диаграмма на
рис.2.29,б.
Аналогично можно показать, что
если в цепь ротора вводится добавочная
ЭДС, направленная согласно с ЭДС
 ,
то частота вращения ротора увеличивается.
,
то частота вращения ротора увеличивается.
Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД. Однако реализация этого способа требует более сложной системы управления, чем при регулировании частоты тока в обмотке статора.
1. Исследование асинхронного двигателя с короткозамкнутым ротором
Проводятся опыты холостого хода и короткого замыкания. Делается построение круговой диаграммы (КД) для получения рабочих характеристик.
КОНТРОЛЬНЫЕ ВОПРОСЫ ПРИ ЗАЩИТЕ
ЛАБОРАТОРНОЙ РАБОТЫ
Основные конструктивные элементы асинхронного двигателя (АД) и их назначение.
Назначение и принцип действия АД.
Изобразите электрическую схему для определения клемм, принадлежащих одной фазе.
Как маркируют клеммы фаз обмотки статора АД?
Как маркируют клеммы начал фаз обмотки статора АД?
Как маркируют клеммы концов фаз обмотки статора АД?
Как соединяются клеммы фаз обмотки статора АД при схеме неполный треугольник?
Как соединяются клеммы фаз обмотки статора АД при схеме неполная звезда?
Объясните, почему при соединении двух любых фаз в неполный треугольник и при подаче на них переменного напряжения будет наводиться ЭДС в третьей фазе?
Объясните, почему при соединении двух любых фаз в неполную звезду и при подаче на них переменного напряжения не будет наводиться ЭДС в третьей фазе?
Поясните, как осуществить реверс ротора АД?
Что такое холостой ход АД?
Величина скольжения АД на холостом ходу.
Какие потери и где возникают в АД на холостом ходу?
Как получить по результатам опыта холостого хода АД значение коэффициента мощности?
Что такое короткое замыкание АД?
Величина скольжения в первое мгновение пуска АД.
Какие потери и где возникают в АД при коротком замыкании?
Как получить по результатам опыта короткого замыкания значение коэффициента мощности?
Какие параметры схемы замещения АД и каким образом можно определить из опытов холостого хода и короткого замыкания?
Поясните выбор масштаба тока при построении КД.
Как определяется центр окружности токов КД?
Как определяется величина фазного тока обмотки статора по КД?
Как определяется величина приведенного фазного тока обмотки ротора по КД?
Как определяется местонахождение линии электромагнитных моментов КД?
Как определяется местонахождение линии полезных электромагнитных моментов КД?
Как выполняется шкала скольжений АД КД?
Какой диапазон скольжения характеризует двигательный режим работы асинхронной машины (АМ)?
Какой диапазон скольжения характеризует генераторный режим работы АМ?
Какой диапазон скольжения характеризует режим электромагнитного тормоза АМ?
Как по круговой диаграмме определить критическое скольжение АД.
Ак определяется по КД частота вращения ротора АД?
Как выполняется шкала коэффициента мощности АД КД?
Как определяется по КД коэффициент мощности АД?
Как рассчитывается масштаб моментов при выполнении КД?
Как определяется по КД величина электромагнитного момента?
Как определяется по КД величина максимального электромагнитного момента?
Как определяется по КД величина полезного момента АД?
Как рассчитывается масштаб мощности при выполнении КД?
Как определяется по КД коэффициент полезного действия АД?
Каким образом выбираются точки на окружности токов КД при построении рабочих характеристик АД?
Назовите потери, которые возникают в АД при работе под нагрузкой?
Каким образом приводят параметры АД к рабочей температуре обмоток?
Исследование асинхронного двигателя с фазным ротором
Осуществляется пуск двигателя с использованием пускового реостата. Получают и анализируют рабочие характеристики при номинальных значениях напряжения и частоты.
КОНТРОЛЬНЫЕ ВОПРОСЫ
ПРИ ЗАЩИТЕ
ЛАБОРАТОРНОЙ РАБОТЫ
Назовите конструктивные различия асинхронных двигателей с фазным и короткозамкнутым ротором.
Изобразите электрическую схему для исследования АД с фазным ротором и дайте необходимые пояснения.
Какие преимущества и недостатки имеет АД с фазным ротором по сравнению с короткозамкнутым?
Как осуществляется пуск АД с фазным ротором?
В цепь какой обмотки и для чего включают пусковой реостат?
Какой характер сопротивления пускового реостата и почему?
Почему при включении активного сопротивления в цепь ротора пусковой момент увеличивается, а пусковой ток уменьшается?
Почему после завершения пуска АД необходимо вывести полностью пусковой реостат из цепи обмотки?
Как рассчитывается скольжение АД?
Какими двумя способами можно определить величину скольжения АД?
Очему колеблется стрелка магнитоэлектрического амперметра, включенного в цепь ротора под нагрузкой и на холостом ходу?
Изобразите и поясните зависимость скольжения АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Чему равна частота тока в обмотке ротора АД в первое мгновение пуска и что с ней происходит в процессе разгона?
Почему потери холостого хода АД называют постоянными?
Почему коэффициент мощности холостого хода АД не равен нулю?
Почему при увеличении нагрузки на валу АД увеличивается ток в обмотках ротора и статора?
Какие потери в АД называют постоянными и переменными?
Изобразите и поясните зависимость частоты вращения ротора АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость потребляемой активной мощности АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость коэффициента мощности АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость коэффициента полезного действия (КПД) при изменении нагрузки на валу АД, запишите условия, при которых она выполняется.
Изобразите и поясните зависимость тока фазы обмотки статора при изменении нагрузки на валу, запишите условия, при которых она выполняется.
Как рассчитывается коэффициент мощности АД с фазным ротором по результатам исследований?
Как рассчитывается величина полезной активной мощности АД по результатам проводимых исследований?
Как рассчитывается величина коэффициента полезного действия АД по результатам исследований?
Почему не учитывают потери в магнитопроводе ротора АД при номинальной частоте вращения?
Когда АД работает с максимальным КПД?
Исследование асинхронного двигателя в трехфазном, конденсаторном и однофазном режимах
Получают и анализируют рабочие характеристики асинхронного двигателя при трех схемах включения обмотки статора.
КОНТРОЛЬНЫЕ
ВОПРОСЫ
ПРИ ЗАЩИТЕ ЛАБОРАТОРНОЙ
РАБОТЫ
Изобразите электрическую схему исследования АД в трехфазном режиме и дайте необходимые пояснения.
Какое магнитное поле создается трехфазной обмоткой статора при питании синусоидальным симметричным напряжением?
Изобразите электрическую схему исследования АД в конденсаторном режиме и дайте необходимые пояснения.
Какое магнитное поле создается однофазной обмоткой статора при питании синусоидальным напряжением?
Изобразите электрическую схему исследования АД в однофазном режиме и дайте необходимые пояснения.
Когда АД в однофазном режиме не имеет начального пускового электромагнитного момента?
Что служит нагрузкой АД и каким образом ее можно менять?
Как определяется величина полезной мощности на валу при исследовании АД?
Как определяется скольжение при исследовании АД?
Как определяется полезный электромагнитный момент при исследовании АД?
В чем состоит отличие однофазного и конденсаторного режимов работы АД?
Назначение конденсаторов в конденсаторном режиме АД.
Назначение пускового конденсатора в однофазном и конденсаторном режимах работы АД.
Почему при пуске в однофазном и конденсаторном режимах АД используется в качестве фазосдвигающего элемента, как правило, конденсатор?
Почему АД в конденсаторном режиме пускается с двумя конденсаторами, а работает только с одним?
Что понимают под круговым, эллиптическим, пульсирующим магнитными полями?
В чем состоят недостатки применения трехфазного АД в однофазном режиме?
Назовите условия, при которых снимаются рабочие характеристики АД в трехфазном, однофазном и конденсаторном режимах.
Как определяется коэффициент мощности при исследовании АД в трехфазном режиме?
Как определяется коэффициент мощности при исследовании АД в конденсаторном режиме?
Как определяется коэффициент мощности при исследовании АД в однофазном режиме?
Почему коэффициент мощности в конденсаторном режиме АД выше, чем в однофазном при одинаковой нагрузке на валу?
Как определяется коэффициент полезного действия (КПД) при исследовании АД в трехфазном режиме?
РасшифровкаКлиматических исполнений У и УХЛ Е, для трансформаторов климатического исполнения Т и трансформаторов мощностью 4,0кВ·А исполнения У – В... Параметр Расшифровка ОСМ Обозначение типа трансформатора : О – однофазный С – сухой М – многоцелевого назначения...
Обмотки выполнены на пластмассовом каркасе. Трансформатор стянут обоймой с лепестками для крепления... . 1. Размеры трансформатора . Рис. 2. Электрическая схема трансформатора и схема размещения обмоток. Моточные данные трансформатора 6-8, 8-10 ...
Особенности формирования импульсов в первичной цепи трансформатора Тесла………………….……….15 6. Особенности положительной обратной... генераторов высокой частоты и высокочастотный трансформатор , получивший название «трансформатор Теслы». Под его руководством...
Прямой пуск - самый распространенный метод пуска асинхронного двигателя с короткозамкнутым ротором. Двигатель подключается непосредственно к питающей сети через пускатель. При этом асинхронный двигатель с короткозамкнутым ротором развивает высокий пусковой крутящий момент с относительно малым временем разгона. Этот метод обычно используется для двигателей малой и средней мощности, которые достигают полной рабочей частоты вращения за короткое время.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точкиР, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст, двигатель разогнаться не сможет.
Значение начального пускового момента можно получить из формулы (4.46а), приняв
Мп = m1 U12R"2 /{w1 [(R1 + R"2)2 + (X1 + Х"2)2 ]}.
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6-100 кВт ГОСТом установлено kп.м= 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять - семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором - низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДСЕ2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ;
в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
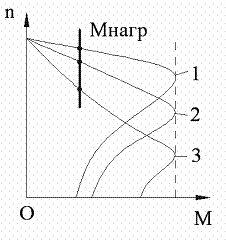
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, а также графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн.
Пуск в ход асинхронного двигателя
В момент пуска в ход n=0, т.е. скольжение S=1. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 ÷ 8 раз больше его номинального тока
Iпуск=(5÷8)Iн.
Как рассматривалось ранее, из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент
Mпуск=(0,8÷1,8)Mн.
Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
2.11.1. Прямое включение в сеть
Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощноститрансформатора.
2.11.2. Пуск при пониженном напряжении
Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети.
Понижение напряжения производят с целью уменьшения пускового тока, но одновременно, как это следует из рис. 2.17 и 2.17.б, происходит уменьшение пускового момента. Если напряжение при пуске понизить в раз, пусковой момент понизится в 3 раза. Поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т.е. в режиме холостого хода.
Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме треугольник, то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме звезда.
Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
n=(1−S)n0=(1−S)60f/p.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
2.12.1. Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостатаRр3>Rр2>0,Rр1=0.
Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Регулирование частоты вращения асинхронных двигателей
Из формулы следует, что частоту вращения ротора асинхронного двигателя можно регулировать следующими способами: изменением частоты f1 питающего напряжения, числа пар полюсов p и величины скольжения s.
Частотное
регулирование. Этот способ позволяет
плавно изменять частоту вращения в
широком диапазоне. Для его осуществления
требуется, чтобы двигатель получал
питание от отдельного источника (рисунок
2.18).
В качестве такого источника в настоящее время наиболее находят применение полупроводниковые статические преобразователи частоты.
В зависимости от требований к механическим характеристикам асинхронного двигателя при частотном регулировании одновременно с изменением частоты f1 приходится по определенному закону изменять и подводимое к обмотке статора напряжение U1.
Максимальный момент двигателя приближенно (без учета сопротивленияr1) определяется по (2.40),
![]() .
.
Учитывая, что ,,, получим
Если при регулировании частоты вращения требуется, чтобы при любой частоте f1 максимальный момент оставался неизменным (регулирование с ), то получим
откуда следует, что для регулирования n2 при необходимо подводимое к обмотке статора напряжение U1 изменять пропорционально его частоте. При этом основной магнитный потокмашиныпри различных значениях частоты f1 остается неизменным, т.е.
![]() (2.56)
(2.56)
Механические
характеристики асинхронного двигателя
при регулировании сMмакс = const показаны
на рисунке 2.19.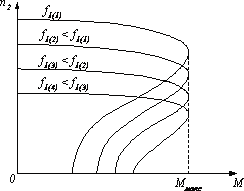
Недостатком частотного регулирования является относительно высокая стоимость преобразовательных установок.
Регулирование
частоты вращения изменением числа пар
полюсов статорной обмотки. Для
осуществления данного регулирования
на статоре в общих пазах размещают не
одну, а две обмотки, имею-
щие различные шаги и, следовательно, различное число пар полюсов. В зависимости от необходимой частоты вращения в сеть подключается та или иная обмотка. Этот способ применяется сравнительно редко, так как имеет существенный недостаток – малое использование обмоточного провода(в работе находится только одна из обмоток).
Значительно чаще изменение числа пар полюсов достигается изменением (переключением) схемы соединений обмотки статора. Принцип такого переключения показан на рисунке 2.20.
При переходе с последовательного соединения двух катушек на параллельное число пар полюсов изменяется с 2 на 1. При наличии фазной обмотки на роторе, её также необходимо переключать одновременно с обмоткой статора, что является большим недостатком. Поэтому данный способ регулирования частоты вращения применяется только у двигателей с короткозамкнутым ротором.
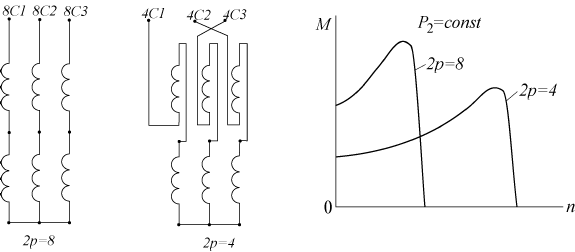
Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре частоты вращения. Известно большое число схем, позволяющее осуществлять переключение числа пар полюсов. Эти схемы разделяются на схемы регулирования с постоянным моментом и схемы регулирования с постоянной мощностью. Механические характеристики двухскоростных двигателей показаны на рисунке 2.21.
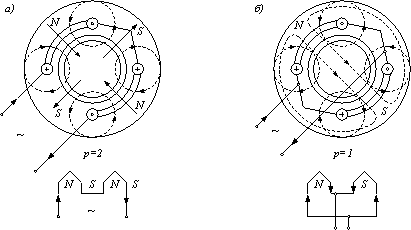
Рисунок 2.20 – Изменение числа пар полюсов переключением катушек обмотки:
а – две пары полюсов; б – одна пара полюсов
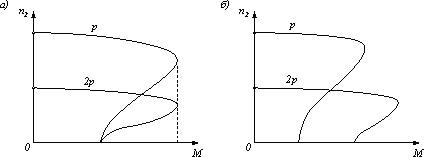
Рисунок 2.21 – Механические характеристики двухскоростного двигателя
с переключением числа пар полюсов в отношении 2:1
при постоянном моменте (а) и при постоянной мощности (б)
Из всех способов регулирования частоты вращения асинхронных двигателей способ переключения числа пар полюсов является наиболее экономичным, хотя и он имеет недостатки:
– двигатели имеют относительно большие габариты и массу по сравнению с двигателями нормального исполнения;
– регулирование частоты вращения ступенчатое.
Многоскоростные двигатели применяют для электропривода станков и различных механизмов, частоту вращения которых нужно регулировать в широких пределах (например – лифтовые асинхронные двигатели).
Регулирование
частоты вращения за счет изменения
питающего напряжения.
Отмеченное регулирование можно
осуществить посредством тиристорного
регулятора напряжения РН (рисунок 2.22).

Так
как вращающий момент асинхронного
двигателя пропорционален ,
то механические характеристики при
напряжениях, меньше номинального, пойдут
ниже естественной (рисунок 2.23).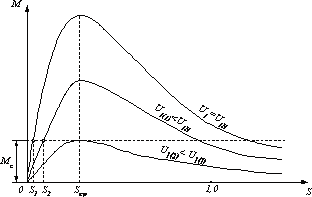
Если момент сопротивления MС остается постоян-ным, то как следует из рисунка 2.23, при снижении напряжения сколь-жение двигателя
увеличивается.
Частота вращения ротора при этом уменьшается.
Регулирование скольжения этим способом возможно в пределах
0 < s < sкр.
Дальнейшее снижение напряжения (ниже U1(2)) недопустимо, так как при этом Mмакс < MС и двигательостановится.
Регулирование частоты вращения двигателей изменением подводимого напряжения U1 имеет существенный недостаток: в этом случае увеличиваются потери и, таким образом, снижается КПД двигателя. При снижении напряжения пропорционально U1 уменьшается основной магнитный поток машины, вследствие чего при M = MС =const возрастают ток в обмотке ротора и, следовательно, электрические потери в роторе. Магнитные потери в стали статора уменьшаются. Обычно при нагрузках двигателей, близких к номинальной, снижение U1 приводит к увеличению суммарных потерь и повышению нагрева двигателей. Поэтому рассматриваемый способ регулирования частоты вращения находит применение главным образом для машин небольшой мощности.
Регулирование
частоты вращения асинхронных двигателей
путем включения в цепь ротора добавочного
активного сопротивления. Данный способ
регулирования применяется только в
двигателях с фазным ротором. Он позволяет
плавно изменять частоту вращения в
широких пределах (рисунок 2.24). Недостатками
его являются: большие потери энергии в
добавочных сопротивлениях, чрезмерно
«мягкая» механическая характеристика
двигателя при большом сопротивлении в
цепи ротора. В некоторых случаях последнее
является недопустимым, так как небольшому
изменению нагрузочного момента
соответствует существенное изменение
частоты вращения. На практике данный
способ применяется, главным образом,
для регулирования частоты вращения
небольших двигателей, например, в
подъемных устройствах.
![]()
При данном способе регулирования частоты вращения двигателя регулировочный реостат (добавочное активное сопротивление), включаемый в цепь ротора, должен быть рассчитан на длительный режим работы. Поэтому пусковые реостаты, рассчитанные на кратковременное прохождение тока в период пуска, не могут использоваться как регулировочные.
Прямой пуск - самый распространенный метод пуска асинхронного двигателя с короткозамкнутым ротором. Двигатель подключается непосредственно к питающей сети через пускатель. При этом асинхронный двигатель с короткозамкнутым ротором развивает высокий пусковой крутящий момент с относительно малым временем разгона. Этот метод обычно используется для двигателей малой и средней мощности, которые достигают полной рабочей частоты вращения за короткое время.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точкиР, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст, двигатель разогнаться не сможет.
Значение начального пускового момента можно получить из формулы (4.46а), приняв
Мп = m1 U12R"2 /{w1 [(R1 + R"2)2 + (X1 + Х"2)2 ]}.
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6-100 кВт ГОСТом установлено kп.м= 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять - семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором - низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДСЕ2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ;
в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, а также графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн.
Пуск в ход асинхронного двигателя
В момент пуска в ход n=0, т.е. скольжение S=1. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 ÷ 8 раз больше его номинального тока
Iпуск=(5÷8)Iн.
Как рассматривалось ранее, из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент
Mпуск=(0,8÷1,8)Mн.
Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
2.11.1. Прямое включение в сеть
Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощноститрансформатора.
2.11.2. Пуск при пониженном напряжении
Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети.
Понижение напряжения производят с целью уменьшения пускового тока, но одновременно, как это следует из рис. 2.17 и 2.17.б, происходит уменьшение пускового момента. Если напряжение при пуске понизить в раз, пусковой момент понизится в 3 раза. Поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т.е. в режиме холостого хода.
Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме треугольник, то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме звезда.
Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
n=(1−S)n0=(1−S)60f/p.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
2.12.1. Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостатаRр3>Rр2>0,Rр1=0.
Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Регулирование частоты вращения асинхронных двигателей
Из формулы следует, что частоту вращения ротора асинхронного двигателя можно регулировать следующими способами: изменением частоты f1 питающего напряжения, числа пар полюсов p и величины скольжения s.
Частотное
регулирование. Этот способ позволяет
плавно изменять частоту вращения в
широком диапазоне. Для его осуществления
требуется, чтобы двигатель получал
питание от отдельного источника (рисунок
2.18).
В качестве такого источника в настоящее время наиболее находят применение полупроводниковые статические преобразователи частоты.
В зависимости от требований к механическим характеристикам асинхронного двигателя при частотном регулировании одновременно с изменением частоты f1 приходится по определенному закону изменять и подводимое к обмотке статора напряжение U1.
Максимальный момент двигателя приближенно (без учета сопротивленияr1) определяется по (2.40),
![]() .
.
Учитывая, что ,,, получим
Если при регулировании частоты вращения требуется, чтобы при любой частоте f1 максимальный момент оставался неизменным (регулирование с ), то получим
откуда следует, что для регулирования n2 при необходимо подводимое к обмотке статора напряжение U1 изменять пропорционально его частоте. При этом основной магнитный потокмашиныпри различных значениях частоты f1 остается неизменным, т.е.
![]() (2.56)
(2.56)
Механические
характеристики асинхронного двигателя
при регулировании сMмакс = const показаны
на рисунке 2.19.
Недостатком частотного регулирования является относительно высокая стоимость преобразовательных установок.
Регулирование
частоты вращения изменением числа пар
полюсов статорной обмотки. Для
осуществления данного регулирования
на статоре в общих пазах размещают не
одну, а две обмотки, имею-
щие различные шаги и, следовательно, различное число пар полюсов. В зависимости от необходимой частоты вращения в сеть подключается та или иная обмотка. Этот способ применяется сравнительно редко, так как имеет существенный недостаток – малое использование обмоточного провода(в работе находится только одна из обмоток).
Значительно чаще изменение числа пар полюсов достигается изменением (переключением) схемы соединений обмотки статора. Принцип такого переключения показан на рисунке 2.20.
При переходе с последовательного соединения двух катушек на параллельное число пар полюсов изменяется с 2 на 1. При наличии фазной обмотки на роторе, её также необходимо переключать одновременно с обмоткой статора, что является большим недостатком. Поэтому данный способ регулирования частоты вращения применяется только у двигателей с короткозамкнутым ротором.
Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре частоты вращения. Известно большое число схем, позволяющее осуществлять переключение числа пар полюсов. Эти схемы разделяются на схемы регулирования с постоянным моментом и схемы регулирования с постоянной мощностью. Механические характеристики двухскоростных двигателей показаны на рисунке 2.21.
Рисунок 2.20 – Изменение числа пар полюсов переключением катушек обмотки:
а – две пары полюсов; б – одна пара полюсов
Рисунок 2.21 – Механические характеристики двухскоростного двигателя
с переключением числа пар полюсов в отношении 2:1
при постоянном моменте (а) и при постоянной мощности (б)
Из всех способов регулирования частоты вращения асинхронных двигателей способ переключения числа пар полюсов является наиболее экономичным, хотя и он имеет недостатки:
– двигатели имеют относительно большие габариты и массу по сравнению с двигателями нормального исполнения;
– регулирование частоты вращения ступенчатое.
Многоскоростные двигатели применяют для электропривода станков и различных механизмов, частоту вращения которых нужно регулировать в широких пределах (например – лифтовые асинхронные двигатели).
Регулирование
частоты вращения за счет изменения
питающего напряжения.
Отмеченное регулирование можно
осуществить посредством тиристорного
регулятора напряжения РН (рисунок 2.22).
Так
как вращающий момент асинхронного
двигателя пропорционален ,
то механические характеристики при
напряжениях, меньше номинального, пойдут
ниже естественной (рисунок 2.23).
Если момент сопротивления MС остается постоян-ным, то как следует из рисунка 2.23, при снижении напряжения сколь-жение двигателя
увеличивается.
Частота вращения ротора при этом уменьшается.
Регулирование скольжения этим способом возможно в пределах
0 < s < sкр.
Дальнейшее снижение напряжения (ниже U1(2)) недопустимо, так как при этом Mмакс < MС и двигательостановится.
Регулирование частоты вращения двигателей изменением подводимого напряжения U1 имеет существенный недостаток: в этом случае увеличиваются потери и, таким образом, снижается КПД двигателя. При снижении напряжения пропорционально U1 уменьшается основной магнитный поток машины, вследствие чего при M = MС =const возрастают ток в обмотке ротора и, следовательно, электрические потери в роторе. Магнитные потери в стали статора уменьшаются. Обычно при нагрузках двигателей, близких к номинальной, снижение U1 приводит к увеличению суммарных потерь и повышению нагрева двигателей. Поэтому рассматриваемый способ регулирования частоты вращения находит применение главным образом для машин небольшой мощности.
Регулирование
частоты вращения асинхронных двигателей
путем включения в цепь ротора добавочного
активного сопротивления. Данный способ
регулирования применяется только в
двигателях с фазным ротором. Он позволяет
плавно изменять частоту вращения в
широких пределах (рисунок 2.24). Недостатками
его являются: большие потери энергии в
добавочных сопротивлениях, чрезмерно
«мягкая» механическая характеристика
двигателя при большом сопротивлении в
цепи ротора. В некоторых случаях последнее
является недопустимым, так как небольшому
изменению нагрузочного момента
соответствует существенное изменение
частоты вращения. На практике данный
способ применяется, главным образом,
для регулирования частоты вращения
небольших двигателей, например, в
подъемных устройствах.![]()
При данном способе регулирования частоты вращения двигателя регулировочный реостат (добавочное активное сопротивление), включаемый в цепь ротора, должен быть рассчитан на длительный режим работы. Поэтому пусковые реостаты, рассчитанные на кратковременное прохождение тока в период пуска, не могут использоваться как регулировочные.
Из курса электротехники известно, что при пуске асинхронные электродвигатели потребляют из питающей сети значительные пусковые токи. Действительно, в момент пуска скольжение асинхронного электродвигателя s =1, в номинальном же режиме оно не превышает 0,05. Это означает, что в момент пуска вращающееся магнитное поле статора в 20 раз чаще пересекает обмотку ротора.
Однако пусковой ток в статорной и роторной обмотках обычно не превышает номинальный ток более чем в 7-8 раз, так как в момент пуска индуктивное сопротивление роторной цепи резко повышается за счет увеличения частоты тока. Известно, что индуктивное сопротивление любой цепи может быть определено но следующему выражению:
где L -индуктивность цепи.
В момент пуска частота тока в обмотке ротора при принятых выше условиях (s пуск = 1; s ном = 0,05) в 20 раз выше, чем в номинальном режиме. Поэтому полное сопротивление роторной цепи Z = ?R 2 + x L 2 при пуске намного выше, по сравнению с номинальным режимом. Этим и объясняется тот факт, что ток в момент пуска не в 20 раз превышает свое номинальное значение, а лишь в 7-8.
Для самого электродвигателя повышенные пусковые токи большой опасности не представляют, так как протекают они в течение сравнительно короткого промежутка времени и перегреть обмотки не успевают. Однако.повышенные пусковые токи приводят к большим провалам напряжения в питающей сети, что крайне неблагоприятно сказывается на работе других потребителей. Это заставляет применять ряд специальных мер, ограничивающих пусковые токи асинхронных электродвигателей.
Следует иметь в виду, что асинхронные электродвигатели, имея большой -пусковой ток, обладают сравнительно небольшим пусковым моментом, так как в момент пуска коэффициент мощности роторной щеп и очень низок. Вращающий же момент, развиваемый асинхронным электродвигателем, согласно выражению (96), пропорционален не только току ротора, но и коэффициенту мощности роторной «цепи.
Поэтому искусственные схемы пуска асинхронных электродвигателей, рассматриваемые ниже, часто имеют своей целью не только снижение пусковых токов, но и повышение пусковых моментов.
Пуск электродвигателей с фазным ротором . Асинхронные электродвигатели с фазным ротором, т. е. с ротором, имеющим контактные кольца, пускаются в ос од при помощи пускового реостата, включенного в цепь ротора (см. рис. 40, а ). Введение реостата уменьшает пусковой ток и позволяет получить, требуемый пусковой момент вплоть до M крит . Выражение (93) показывает, что величина скольжения s крит , при которой имеет место максимальный момент, зависит от активного сопротивления фазы ротора. Следовательно, подобрав соответственную величину этого сопротивления, можно получить момент, близкий по величине к М крит (см. рис. 43 и 44).
Расчет пускового реостата удобно производить графо-аналитическим способом, имеющим много общего с.ранее рассмотренными способами для электродвигателей постоянного тока.
Чтобы рассчитать пусковой реостат, необходимо знать номинальные данные электродвигателя и иметь его естественную механическую характеристику п = f (М ): Последняя может быть легко построена, как известно, по двум точкам - по синхронной скорости при нулевом моменте и по номинальной скорости при номинальном (моменте. Имея эти данные, можно производить расчет пускового реостата по следующей методике.
1. Выбираются пределы изменения вращающего момента при пуске М m ах и М min и откладываются на пусковой диаграмме (рис. 47). При выборе моментов следует руководствоваться тем, что максимальный момент при пуске должен быть несколько меньше опрокидывающего момента, а минимальный момент- несколько выше момента статического сопротивления М с , причем, чем меньше выбрана разность (М m ах -М min ), тем больше ступеней будет иметь пусковой реостат и тем плавнее и быстрее будет происходить пуск электродвигателя.
2. Пуск электродвигателя должен начинаться с точки 1 , так как при трогании с места электродвигатель, по принятому выше условию, должен развивать момент М m ах при n = 0. Следовательно, первая пусковая характеристика а , соответствующая полностью включенному пусковому реостату, должна проходить через точки п 0 и 1 . Скорость электродвигателя будет возрастать, так как М m ах > M c , т. е. имеется избыточный момент, сообщающий механизму ускорение. С увеличением скорости вращающий момент будет уменьшаться, и при достижении им значения М min (точка 2 ) должна быть отключена первая ступень пускового реостата.
3. При отключении первой ступени происходит переход электродвигателя на работу с характеристики а на характеристику b , соответствующую включенному пусковому реостату без первой ступени. За время отключения первой ступени скорость электродвигателя практически не успевает измениться, поэтому можно считать, что переход с одной характеристики на другую происходит по горизонтальной прямой 2 -3 и характеристика b проходит через точки п 0 и 3.
4. Дальнейший разгон электродвигателя происходит уже по характеристике b до тех пор, пока вращающий момент снова не снизится до значения М min . При этом должна быть отключена вторая ступень реостата и электродвигатель перейдет на работу по характеристике с . Переход происходит по горизонтальной прямой 4 -5 , а характеристика с проходит через точки n 0 и 5 .
5. Когда при работе на характеристике с момент опять снизится до значения M min , отключается третья последняя ступень пускового реостата и электродвигатель переходит на работу по естественной характеристике d . На этой характеристике разгон электродвигателя продолжается до тех пор, пока его вращающий момент не станет равным моменту статического сопротивления. После этого разгон прекратится и электродвигатель будет работать с установившейся скоростью.
Следует заметить, что в рассмотренном случае число ступеней пускового реостата заранее выбрано. Поэтому моменты М m ах и М min должны быть выбраны так, чтобы при отключении третьей ступени электродвигатель переходил на естественную характеристику d . Если этого не происходит, необходимо несколько изменить значения моментов M mах и М min и повторить построение. В том случае, когда число ступеней не ограничивается, построение ведется до тех пор, пока не происходит переход на естественную характеристику. Число ступеней реостата определяется в этом случае по пусковой диаграмме.
6. Пользуясь пусковой диаграммой (см. рис. 47), нетрудно определить сопротивление как всего реостата, так и отдельных его ступеней. Нетрудно доказать, что отрезок 7 -9 представляет в масштабе сопротивлений активное сопротивление фазы обмотки ротора, а отрезок 1 - 7 в том же масштабе - полное активное сопротивление фазы пускового реостата. Отрезки 1 -3 , 3 -5 и 5 -7 представляют соответственно величины активных сопротивлений первой, второй и третьей ступеней пускового реостата.
Масштаб сопротивлений может быть определен по выражению
где 7 -9 - отрезок на диаграмме в единицах длины;
R 2 - активное сопротивление одной фазы ротора, которое может быть взято из паспортных данных электродвигателя или определено путем измерения или приближенного расчета по формуле
где s -номинальное скольжение;
т 2 - число фаз ротора;
I 2 -номинальный ток в фазе.ротора;
М -номинальный вращающий момент.
Рассмотренный способ пуска в ход асинхронных электродвигателей с фазным ротором отличается простотой, надежностью. Он позволяет снизить величину.пускового тока и повысить, при необходимости, пусковой момент вплоть до опрокидывающего момента. Недостатком данного способа следует считать значительные потери энергии в пусковых реостатах, а также большие габариты последних при большом числе ступеней. Чтобы избежать применения слишком громоздких пусковых реостатов, в крановых схемах часто применяют реостаты с так называемой несимметричной схемой, когда сопротивление выводится не одновременно из трех фаз роторной цепи, а постепенно.
В начальный момент пуска в роторную цепь электродвигателя введено все сопротивление. Затем постепенно, по мере разгона электродвигателя, с помощью барабанного или кулачкового контроллера выводится первая ступень сопротивления из цепи первой фазы, потом второй, затем третьей; при следующем положении контроллера выводится вторая ступень сопротивления из цепи первой фазы и так до тех пор, пока при последнем положении контроллера не будет выведено все сопротивление и замкнута накоротко цепь ротора.
Такой способ пуска создает некоторую асимметрию токов роторной цепи, что, однако, опасности для электродвигателя не представляет и позволяет в то же время несколько уменьшить габариты пусковых реостатов и контроллеров.
Пуск электродвигателей с короткозамкнутым ротором.
Пуск мощных асинхронных электродвигателей с короткозамкнутым ротором связан с рядом трудностей, так как ограничение пусковых токов введением дополнительных сопротивлений в. цепь ротора применить в данном случае невозможно. Как правило, в подъемно-транспортных машинах находят применение электродвигатели с короткозамкнутым ротором сравнительно небольшой мощности, вследствие чего необходимости в ограничении пусковых токов обычно не возникает.
При питании асинхронного электродвигателя с короткозамкнутым ротором от мощности сети пуск в большинстве случаев производится путем подключения обмотки статора к полному напряжению питающей сети, как показано на рис. 48, а .
Если мощность электродвигателя соизмерима с мощностью сети, пусковые токи вызывают недопустимо большие падения напряжения, что ухудшает условия работы других потребителей, питающихся от той же сети; в этом случае необходимо принимать меры, ограничивающие пусковые токи.
При пуске непосредственным включением на полное напряжение обмотка статора подключается к сети простым включением соответствующего аппарата - рубильника, контактора, магнитного пускателя и т. п. При этом имеет место толчок пускового тока, который в 7-8 раз превышает номинальный ток электродвигателя. Нужно иметь в виду, что толчок тока в момент пуска зависит не от нагрузки, а от величины сопротивления обмоток электродвигателя и напряжения сети. В связи с этим, если возникает необходимость в снижении пусковых токов, к электродвигателю в момент пуска подводят пониженное напряжение.
Снижение напряжения, подводимого к статорной обмотке, может быть осуществлено:
а) переключением обмотки статора со звезды на треугольник;
б) при помощи активного сопротивления, включаемого в цепь статора;
в) применением автотрансформатора.
Общим для всех указанных способов является снижение пускового тока электродвигателя при одновременном уменьшении его пускового момента, который, как известно, пропорционален квадрату напряжения. Это означает, что рассматриваемый способ пуска применим лишь при небольших моментах сопротивления.

Пуск переключением статорной обмотки со звезды на треугольник применяется наиболее часто для асинхронных электродвигателей с короткозамкнутым ротором, у которых при нормальной работе обмотка статора соединена треугольником. Принцип работы схемы (рис. 48, б ) состоит в том, что в начальный период пуска обмотка статора включается звездой и присоединяется к сети. Когда же электродвигатель разовьет некоторую скорость, обмотку переключают на треугольник. Очевидно, что величина пускового тока при соединении звездой в?3 раз меньше, чем при соединении треугольником, так как величина напряжения, подводимого к каждой фазе электродвигателя, в первом случае в?3 раз меньше по сравнению со вторым случаем. Правда, пусковой момент будет в три раза меньше. Как показано на рис. 48, б , для осуществления пуска электродвигателя данным способом никакой сложной аппаратуры не требуется. Пуск электродвигателя осуществляется обычным трехполюсным переключателем Р .
Сравнительно редко используется малоэкономичный способ пуска при помощи активного сопротивления, включаемого в цепь обмотки статора. Этот способ пуска применяют лишь в тех случаях, когда обмотка статора электродвигателя при нормальной работе должна быть включена звездой. При пуске вначале замыкается рубильник Р 1 (рис. 48, в ). При этом статорная обмотка подключается к сети через реостат R . Когда электродвигатель разовьет некоторое число оборотов, замыкается рубильник Р 2 и реостат шунтируется.
Довольно редко также применяется пуск асинхронных электродвигателей с помощью автотрансформатора. В этом случае в первый период пуска шестиполюсный переключатель П (рис. 48, г ) ставится в положение 1 и к зажимам статора через автотрансформатор Т подводится пониженное напряжение. Когда электродвигатель разгонится, переключатель ставится в положение 2 и статор оказывается под полным напряжением сети.
Общим недостатком всех рассмотренных способов пуска асинхронных электродвигателей с короткозамкнутым ротором от пониженного напряжения является значительное снижение пускового момента.
Чтобы ограничить пусковой ток без одновременного снижения пускового момента, необходимо на время пуска увеличить сопротивление обмотки ротора. Для этого, на роторе помещают не одну, а две короткозамкнутые обмотки (двухклеточные электродвигатели) или выполняют роторы с так называемым глубоким пазом.
Двухклеточные асинхронные электродвигатели и электродвигатели с глубоким пазом обладают большим пусковым моментом и меньшей кратностью пускового тока, чем короткозамкнутые электродвигатели обычного исполнения, однако стоимость первых значительно выше и применяют их сравнительно редко.