Regulatory P, PD, PI, PID. Są to regulatory P, PD, PI, PID.
Po pierwsze, wspominamy, że same koncepcje regulatorów P, PD, PI, PID (P, PD, PI, PID) są rodzajem skrótu do pojęcia: "urządzenie sterujące () dostarczające na wyjściu kontrolowany parametr lub jego zmiany, opisane przez typ P , PI itp. ....... ". Dzięki temu:
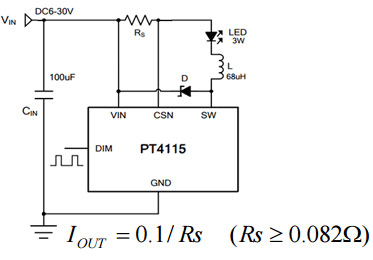
Bardzo ważną informacją jest to, że w przeważającej większości przypadków regulatory te wprowadzają zmiany regulowanego parametru do parametru regulującego (działania). Dla jasności, w tym artykule będziemy mówić o regulacji temperatury pokojowej (zachowując jej wartość X stopni) za pomocą określonej grzałki pokojowej, której moc wyjściowa zależy od poziomu sygnału wejściowego. Tj gdy temperatura zmienia się o pewną dodatnią wartość e (kiedy temperatura wzrasta do X + e) do standardowego wejścia U grzałka zostanie dodana do ujemnego sygnału regulatora u. Wynikowy sygnał na wejściu grzejnika będzie zatem wynosił U-u , co zmniejszy moc wyjściową nagrzewnicy, a tym samym temperaturę pokojową.
Bardzo często e nazywany "błędem" lub "odrzuceniem", X - "poziom zaprogramowany" lub "wartość zadana", oraz XOgólnie może to być również sygnał regulowany w innej pętli sterowania. ! Aby uniknąć zjawisk oscylacyjnych, pożądane jest, aby "górna" pętla regulacji była "wolna" w stosunku do dolnej!
Rozważ działanie kontrolera PID (PID)jako najbardziej uniwersalny przedstawiciel klasy. Każde inne można uzyskać przez wyzerowanie współczynnika transmisji z odpowiednim terminem funkcji przesyłania. Tak więc
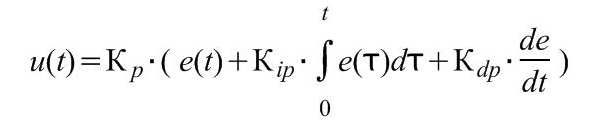
Funkcja transferu PIDopisany przez równanie:
gdzie "tau" jest czasem od zmiany e regulowana wartość stała się niezerowa (znacząco różna), a żargon strzelców maszynowych nadal wymaga następujących nazw dla składników równania i ich wartości wyprowadzonych:
Oczywiście, funkcja zawiera 3 terminy, pierwsza jest proporcjonalna do zmiany w danym parametrze, druga jest integralna, a trzecia jest różnicowa. W dalszej części użyjemy w argumencie notacji z równania (2). Zastanów się, co jest w porządku:
Regulacja proporcjonalna (regulatory P lub P) : - wartość zmiany wpływu regulacji jest proporcjonalna do wielkości odchylenia. Logicznie rzecz biorąc, im większe jest odchylenie temperatury w kompatybilniku od ustawionego poziomu, tym silniej należy zmienić moc grzałki, aby zrekompensować zmianę. u (t) = P (współczynniki Kd i Ki równania (2) są równe zeru).
Zintegrowane rozporządzenie: - wartość zmiany działania regulacyjnego zależy od skumulowanego działania odchylenia kontrolowanej zmiennej. Spokojnie, nic nie jest skomplikowane. Rozważmy nasz przykład - jeśli niska temperatura w pomieszczeniu jest nie do przyjęcia, ponieważ na parapecie są cenne termofilne kaktusy, a niektórzy klaunowie otwierają okno w zimie, proporcjonalna regulacja po prostu nie pozwala na rozgrzanie pomieszczenia z powodu racjonalności jego ustawień. Jeżeli skumulowany efekt niskiej temperatury wzrasta (całka zmiany), to ten termin daje dodatkowy przyrost mocy grzejnika.
Regulacja różniczkowa: - wartość zmiany działania regulacyjnego zależy od tempa zmian kontrolowanego parametru. Nie ma nic skomplikowanego, ponieważ - jeśli, na przykład, temperatura na zewnątrz gwałtownie spadła, lepiej jest jak najszybciej ogrzać pokój i ściany i nie pozwolić im uzyskać wilgotności. ! W układach hydraulicznych i systemach, które mają własne częstotliwości oscylacji zbliżone do charakterystycznych czasów rozpoczęcia procesów regulacyjnych, ten rodzaj regulacji jest mało przydatny, ponieważ łatwo wywołuje giroudary lub rezonanse!
Regulatory PD lub PD, po prostu opisz: Funkcja przenoszenia P (P) regulatora jest opisana równaniem: u (t) = P + D
Regulatory PI lub PI są również opisane po prostu: Funkcja przenoszenia P (P) regulatora jest opisana równaniem: u (t) = P + I (współczynnik Ki równania (2) wynosi zero).
Równanie (2), ze względu na prostotę, często można zapisać jako:
nie ma tu żadnej sztuczki, to wszystko to samo, tylko kolejny wpis.
P, PI, PID, PD PRAWO ROZPORZĄDZENIA.
Ogólny opis
Zasada regulatora PID
W przypadku sterowników pozycyjnych proces kontrolny jest oscylacją wokół danego punktu. Naturalnie wynika to z charakterystyki statycznej "przekaźnika" Y (U-X).
REGULATORY
Z PRZEPISAMI REGULACYJNYMI PID Na rysunku pokazano liniową statyczną charakterystykę Y (U-X).
proporcjonalny regulator
Jeśli wejście E = U-X (rezydualne) i wartość wyjściowa sygnału regulatora Y są połączone prostą relacją Y = K · (U-X), taki regulator nazywamy proporcjonalnym. Oczywiście liniowa część statycznej charakterystyki nie jest nieskończona, jest ograniczona do maksymalnej możliwej wartości wyjściowej: Ymax. Na przykład przy regulacji temperatury wody w zbiorniku: X - temperatura wody; U - ustawiona wartość wymaganej temperatury; Y - sygnał wyjściowy regulatora (moc grzałki, W); Ymax, na przykład, 750 watów. Jeżeli przy maksymalnej mocy wartość wynosi E = 75 ° C, to K = 0,1 ° C / W.
Przy bardzo dużym wzmocnieniu K regulator proporcjonalny degeneruje się do pozycji pozycyjnej z zerowym strefą nieczułości. Z mniejszą wartością regulacji K występuje bez wahania.
(patrz rys. 2).
P-kontroler z nagłą zmianą
zadania od 0 do U (krzywa przyspieszenia)
Zauważ, że wartość regulowanej wartości X nigdy nie osiąga wartości odniesienia U. Powstaje tak zwany błąd statyczny: d (patrz rys. 2). Rzeczywiście, gdy temperatura wody X zbliża się do zadania U, dostarczona moc Y stopniowo maleje, ponieważ Y = K · (U-X). Ale ciepło rozpraszające się do otoczenia wzrasta, a równowaga osiągnie Y = K · d, a d nie osiągnie 0, ponieważ jeśli d wynosi 0, wówczas oba Y = 0 i X = 0. Tak więc na wyjściu regulatora ustawiona jest pewna wartość Y = K · d, co powoduje, że regulowana ilość X jest w stanie innym niż ustawienie. Im więcej K, tym mniej d. Jednak przy wystarczająco dużym K ATS i obiekt może przekształcić się w samo-oscylacje. To wzmocnienie graniczne jest określane przez stosunek nachylenia krzywej przyspieszania R i opóźnienia transportu do obiektu: Kmax = 2 / (R · do) (patrz: rys. 2).
W niektórych przypadkach, przy niewielkim opóźnieniu w transporcie, błąd statyczny mieści się w wymaganych granicach, więc U-regulatory znajdują jakieś zastosowanie. Aby wyeliminować błąd statyczny d podczas tworzenia wartości wyjściowej Y, wprowadza się integralną składową odchylenia od wartości zadanej:
Y = K · (U-X) + In (U-X) / Ti,
gdzie Ti jest stałą całkowania.
Zatem im dłuższy czas, w którym wartość X jest mniejsza niż wartość odniesienia, tym większy jest integralny składnik, tym większy jest sygnał wyjściowy. Regulator o takiej zasadzie tworzenia sygnału wyjściowego nazywany jest proporcjonalnym integralnym regulatorem PI.
W stanie ustalonym (d = 0) integrator zawiera wartość In / T, która jest równa mocy wyjściowej wymaganej do uzyskania wymaganego X. W ten sposób integrator znajduje statyczny współczynnik transmisji obiektu. Osiągnięcie stanu stałego w integratorze trwa dość długo. Dlatego regulator PI może być stosowany w przypadku, gdy wpływy zewnętrzne są raczej powolne.
W przypadku gwałtownych zmian czynników zewnętrznych i wewnętrznych (np. Wylali zimną wodę do zbiornika lub drastycznie zmienili zadanie), regulator PI potrzebuje czasu, aby zrekompensować te zmiany.
Aby przyspieszyć odpowiedź SAR na zewnętrzne wpływy i zmiany w zadaniu, komponent różnicowy D (U-X) zostaje wprowadzony do kontrolera:
Y = K · (U-X) + In (U-X) / Ti + Td · D (U-X),
gdzie Td jest stałą różniczkowania.
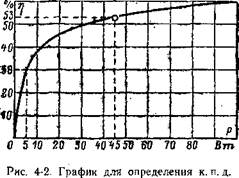
Im szybszy E, tym większy D (U-X). Sterownik z tym prawem kontroli nazywany jest kontrolerem PID. Wybierając K, Ti i Td dla określonego obiektu, możliwe jest zoptymalizowanie jakości pracy regulatora: skrócenie czasu na wyjście do zadania, zmniejszenie wpływu zakłóceń zewnętrznych, zmniejszenie odchylenia od zadania. Przy bardzo dużym Ti regulator bardzo powoli przenosi obiekt do zadania. Przy niskim Ti występuje przeregulowanie, tj. regulowany parametr X pomija zadanie (rys. 7), a następnie zbiega się do niego. Poniżej opisano sposób ustawiania regulatorów, tj. obliczanie współczynników w zależności od właściwości dynamicznych obiektu. Bez dostrajania regulator PI może mieć gorszą jakość działania niż kontroler T. Prezentujemy funkcje transferowe regulatorów P, PI i PID przyjętych w teorii automatyczne sterowanie.
Proporcjonalny regulator - P:
y = K (u -x)tj. informacja zwrotna odbiega od wartości zadanej.
Proporcjonalnie Integralna - PI:
y = (u-x) (Kp + / pTi) tj. sprzężenie zwrotne wprowadza również integralną część odchylenia, co pozwala uniknąć błędu statycznego.
Proportional-Integral-Differential - PID:
y = (u-x) · (Kp + 1 / pTi + p · Td)tj. Pochodna odchylenia jest również wprowadzana do sprzężenia zwrotnego, co pozwala nam poprawić charakterystykę dynamiczną sterownika.
Schemat blokowy regulatora PID pokazano na rys. 3
Schemat blokowy regulatora PID
Wielkość niedopasowania E podlega zróżnicowaniu i integracji. Wartość wyjściowa - Y Regulator PID jest tworzony przez sumowanie ze współczynnikami ważenia elementów różnicowych, proporcjonalnych i integralnych. Dzięki obecności tych składników regulatory mają skróconą nazwę P, PI, PID.
Istnieją modyfikacje regulatorów PID:
a) jeżeli na wyjściu lub w urządzeniu uruchamiającym znajduje się integrator (na przykład serwomechanizm zaworu podgrzewania wody), kontroler PD zostaje przekształcony w kontroler PI, a schemat obliczeniowy regulatora PID wymaga podwójnego zróżnicowania;
b) składnik różnicowy jest często obliczany tylko przez X, co daje bardziej płynne wyjście do trybu, gdy zadanie U zostanie zmienione.
Regulacja regulatorów Po zastosowaniu Regulatory PID dla każdego konkretnego obiektu konieczne jest dostosowanie od jednego do trzech czynników. Możliwe SAR z automatyczną konfiguracją. Dla typowe regulatory znane są najprostsze metody dostosowania analitycznego i tabelarycznego (na przykład dwie techniki Tsidlera).
Ustawienie reakcji na skoku wejściowym Ustawienia algorytmu:
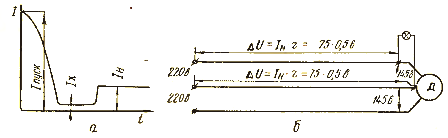
- do wejścia SAR (nastawy) dostarczane jest nowe zadanie - grzejnik jest włączany z maksymalną mocą, a proces przejściowy X (t) określa t0, R, tи (patrz rys. 4):
Krzywa przyspieszenia dla obiektu z opóźnieniem transportowym:
to - opóźnienie w transporcie;
ti - stała czasowa (czas koordynacji) jest określana przez bezwładność obiektu;
Xy jest wartością stanu ustalonego;
R jest nachyleniem krzywej przyspieszenia dX / dt (maksymalna szybkość zmiany X)
- współczynniki strojenia obliczane są według następujących przybliżonych relacji:
dla regulatora P K = 1 / R · t0
dla regulatora PD K = 1 / R · t0, Td = 0,25 · t0
dla regulatora PI K = 0,8 / R · t0, Ti = 3 · t0
dla regulatora PID, K = 1,2 / R · t0, Ti = 2 · t0, Td = 0,4 · t0.
Nie jest konieczne doprowadzenie obiektu do maksymalnej możliwej wartości X. Należy jednak pamiętać, że zbyt mały skok nie pozwala na określenie R z dostatecznie wysoką dokładnością.
Metoda maksymalnego ustawienia współczynnik wzmocnienia Metodę tę stosuje się, gdy dozwolony jest proces oscylacyjny, w którym wartości regulowanej wartości znacznie przekraczają granice zadania U.
Aby dostroić metodą max
współczynnik wzmocnienia
Ustawienia algorytmu:
- określa się współczynnik ograniczający Kmax, przy którym SAR i obiekt przechodzą w tryb oscylacyjny, tj. bez części integralnej i różniczkowej (Тd = 0, Тi = Ґ). Początkowo K = 0, następnie wzrasta aż do ATS, a obiekt przechodzi w tryb oscylacyjny. ATS odpowiada schematowi sterownika P (patrz rysunek 2).
- określa się okres oscylacji tc (patrz rys. 5);
dla sterownika P K = 0,5 · Kmax
dla kontrolera PD K = 0,5 · Kmah, Td = 0,05 · tc
dla regulatora PI K = 0,45 · Kmah, Ti = 0,8 · tc
dla regulatora PID, K = 0,6 · Kmah, Ti = 0,5 · tc, Td = 0,12 · tc.
Konfiguracja w dwuetapowym procesie regulacji przez prawo sztafetowe
Aby skonfigurować proces dwuetapowy
rozporządzenie
Ta technika jest wygodna, jeśli używany jest kontroler T, który jest następnie zastępowany przez kontroler PID:
- system przechodzi w tryb regulacji on-off zgodnie z prawem przekaźnika (patrz rys. 6);
określa się amplitudę - A i okres drgań t;
- współczynniki strojenia obliczane są według następujących przybliżonych relacji:
dla regulatora P K = 0,45 / A
dla regulatora PD K = 0,45 / A, Td = 0,05 · tc
dla regulatora PI K = 0,4 / A, Ti = 0,8 · tc
dla regulatora PID, K = 0,55 / A, Ti = 0,5 · tc, Td = 0,12 · tc.
Jeśli obiekt nie zmienia struktury i jej parametrów, wówczas układy z regulatorami PID zapewniają wymaganą jakość regulacji z dużymi zewnętrznymi zakłóceniami i zakłóceniami, czyli błąd E jest bliski 0 (patrz rys. 7). Z reguły nie jest możliwe natychmiastowe precyzyjne skoordynowanie parametrów kontrolera i obiektu. Jeśli Ti jest dwa razy mniejsza od optymalnej, proces regulacji może przejść w tryb oscylacyjny. Jeśli Ti jest znacznie większy niż optymalny, to regulator powoli wchodzi w nowy tryb i słabo reaguje na szybkie zakłócenia - G. Zasadniczo konieczna jest dodatkowa regulacja. Na rys. 7 pokazuje wpływ nieoptymalnych ustawień regulatorów PID na pojawienie się funkcji przejścia (odpowiedź SAR i obiektu na pojedynczy skok w zadaniu).
dyscyplina "Automatyczna kontrola i automatyzacja"
w "Struktury typowych regulatorów"
Kurchatov 2008
Wprowadzenie
Wzory typowych regulatorów
1. P-regulator
2. Regulator PD
3. Kontroler PI
4. Kontroler PID
Wniosek
Referencje
Wprowadzenie
Każdą pętlę sterowania można ogólnie uznać za system składający się bezpośrednio z samego obiektu sterującego i regulatora, który za pośrednictwem siłownika może wpływać na kontrolowany parametr obiektu.
Każdy regulator można scharakteryzować:
- prawo, na podstawie którego wykonywane jest rozporządzenie;
- rodzaje sygnałów wejściowych (czujniki pierwotne);
- rodzaje sygnałów sterujących wyjściami ( siłowniki);
- sposób ustalenia rozporządzenia;
- dodatkowe funkcje (funkcje dodatkowe, dodatkowe wejścia / wyjścia).
Zgodnie z prawem regulacji są one podzielone na regulatory dwu- i trzypozycyjne, typowe regulatory (regulatory całkowe, proporcjonalne, proporcjonalno-różnicowe, proporcjonalne i proporcjonalno-integralne-skracające, w skrócie I, P, PD, PI i regulatory PID), regulatory z zmienna struktura, adaptacyjne (samoregulujące) i optymalne regulatory.
Rozważ schematy bloków automatycznych regulatorów z typowymi serwonapędami, odtwarzając podstawowe prawa regulacji metodą korekcji równoległej i szeregowej.
Wzory typowych regulatorów
1. P -regulator
Schemat funkcjonalny regulatora P z serwonapędem z proporcjonalną lub całkowitą prędkością ruchu pokazano na rys. 1.
Ryc. 1. Schemat blokowy regulatora składający się ze wzmacniacza, serwomechanizmu i sprzężenia zwrotnego
Negatywne sprzężenie zwrotne w regulatorze odbywa się w pozycji regulatora poprzez wprowadzenie sygnału z serwonapędu na wejście urządzenia sprzężenia zwrotnego. Konstrukcyjne sprzężenie zwrotne odbywa się za pomocą przekładni mechanicznej, elektrycznej lub innej, w zależności od rodzaju serwomechanizmu i urządzenia wzmacniającego polecenia. Charakterystyka regulatorów P (operator i częstotliwość) ma postać:
W đ (đ) = 1 / W о.с (đ); W đ (iщ) = 1 / W о.с (iщ) (1.1)
Aby powyższe wyrażenie było identyczne z równaniem regulatora proporcjonalnego x π = K p y *, konieczne jest spełnienie warunku:
W о.с (đ) = X о.с (đ) / x đ (đ) = 1 / K đ (1.2)
Zgodnie z tym warunkiem, sprzężenie zwrotne powinno być wykonane na podstawie łącza bezwładnościowego wzmacniacza. Zysk sprzężenia zwrotnego k о.с = д = 1 / K p nazywany jest stopniem twardej (to znaczy stałej w czasie) sprzężenia zwrotnego.
Regulatory P mają korpus nastawczy do zmiany q (K p), który służy jako parametr jego ustawienia. Przejściowa reakcja prawdziwego kontrolera P (rys. 2) nieznacznie różni się od ideału w jego początkowej części ze względu na ograniczoną prędkość serwomechanizmu.
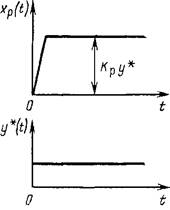
Ryc. 2. Krzywa przejściowa regulatora P
2. PD -regulator
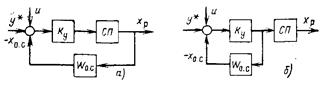
Schemat funkcjonalny kontrolera PD pokazano na rys. 3, a. Element różnicujący jest tworzony przez specjalne urządzenie - wyróżnik, który ma charakterystykę rzeczywistego elementu różnicującego. Na wyjściu generowany jest sygnał, który jest proporcjonalny do szybkości zmiany kontrolowanej zmiennej.

Ryc. 3. Regulator PD: a - schemat blokowy; b - krzywa przejściowa
Sygnał prędkości jest sumowany z sygnałem na podstawie odchylenia kontrolowanej zmiennej. Wynikowy sygnał podawany jest na wejście wzmacniacza. Wzmacniacz i serwomechanizm są pokryte twardym sprzężeniem zwrotnym. W zamkniętym obiegu wzmacniacz-napęd - sprzężenie zwrotne jest tworzone przez P-prawo regulacji z wzmocnieniem K p . Charakterystyka dynamiczna rzeczywistego kontrolera PD jest
Przejściową (czasową) charakterystykę regulatora PD z serwonapędem o ograniczonej prędkości pokazano na rys. 3b i jest sumą czasowej charakterystyki proporcjonalnych i rzeczywistych jednostek różnicujących. Parametrem strojenia samego regulatora jest K p (stopień sprzężenia zwrotnego d); ustawienia różniczku są wzmocnieniem Kd i stałą różnicowania Td , którego produkt charakteryzuje stopień wprowadzenia składnika różnicowego do prawa dotyczącego PD regulacji.
3. PI- regulator
Prawdziwe regulatory PI procesów termicznych mają dwa typy schematy funkcjonalne (Ryc. 4). W pierwszym wariancie (ryc. 4, a) serwonapęd pokryty jest ujemnym sprzężeniem zwrotnym (OOS), a jego charakterystyka nie wpływa na powstawanie prawa sterowania, które jest całkowicie określone przez charakterystykę urządzenia sprzężenia zwrotnego. W drugim wariancie (ryc. 4, b) serwonapęd nie jest objęty sprzężeniem zwrotnym, a prawo sterowania PI jest utworzone przez zasięg sprzężenia zwrotnego tylko wzmacniacza K y. W tym przypadku charakterystyki dynamiczne regulatora jako całości są określane przez właściwości dynamiczne obwodu składającego się z połączonej szeregowo pętli zamkniętej (K y -W o. C) i serwonapędu. Oba warianty schematów strukturalnych regulatorów PI są stosowane w ich wzorach przemysłowych.
Ryc. 4. Schematy blokowe regulatorów PI:
a - serwonapęd zakryty przez b; - napęd serwo nie jest objęty
W pierwszym przykładzie wykonania urządzenie sprzężenia zwrotnego musi mieć charakterystykę dynamiczną rzeczywistego łącza różnicującego.
W tym przypadku kontroler jako całość, niezależnie od rodzaju serwomechanizmu, odtwarza dynamikę kontrolera PI.
Jeśli weźmiemy T d = T i K p = 1 / K d, otrzymamy
 tj. funkcja przenoszenia regulatora PI, opisana również przez równania różniczkowe
tj. funkcja przenoszenia regulatora PI, opisana również przez równania różniczkowe W przemysłowych regulatorach PI różne urządzenia są wykorzystywane jako sprzężenie zwrotne: elektryczne, pneumatyczne i hydrauliczne. Ale wszystkie one służą jako analogi do rzeczywistego powiązania różnicującego, mają odpowiednie charakterystyki dynamiczne i nazywane są urządzeniami o elastycznym lub elastycznym (zmieniającym się w czasie) sprzężeniu zwrotnym.
W drugiej wersji sterownika PI (rys. 4, b) możliwe są dwa przypadki: 1) serwomechanizm ma charakterystykę integralnego połączenia (na przykład serwo elektryczne lub hydrauliczne ze zmienną prędkością); 2) serwomechanizm ma charakterystykę proporcjonalnego połączenia (serwo membranowe ze sprężyną równoważącą). W obu przypadkach, zgodnie z zasadą ustalania wynikowej charakterystyki dwóch połączonych szeregowo łączy
W p (p) = W КУУ (p) W с.п (p), (3.3), gdzie W КУУ (p) = 1 / W о.с (đ).
Przy korzystaniu z serwonapędu z funkcją przenoszenia zintegrowanego ogniwa W CP (p) = 1/ T P, funkcja przenoszenia regulatora ma postać
W tym samym czasie do tworzenia prawa PI za pomocą urządzenia sprzężenia zwrotnego, konieczne jest, aby stosunek
1 / W о.с (đ) = W КУУ (đ) = K đ (1 + Т Р) (3.5)
który zapewnia informację zwrotną operatorowi
W о.с (đ) = K о.с / (1 + T Р) = d / (1 + Т Р) (3.6)

Ryc. 5. Przejściowy proces w urządzeniu 6. Przejściowy regulator sprzężenia zwrotnego PI
Ostatnie równanie służy jako operator łącza bezwładnościowego pierwszego rzędu. Kiedy K dla takiego sprzężenia zwrotnego, operator regulatora jako całość ma postać
W p (p) = K p (1 + 1 / T i P)
Ustawienia kontrolera PI to K p i T oraz.
Jeżeli serwo ma charakterystykę proporcjonalnego połączenia i nie jest objęte sprzężeniem zwrotnym (rys. 4, b), to w celu spełnienia warunku (3.2), W о. c (p) musi być prawdziwym wyróżnikiem.
Stała czasowa regulatora PI T i jest liczbowo równa stycznej T d do krzywej przejściowej rzeczywistego elementu różnicującego (rys. 5).
Regulatory przemysłowe mają specjalne urządzenia - sterowniki do zmiany K p (d) i T oraz w dość szerokich, ale ograniczonych granicach. Ponieważ wejście do wejścia regulatora sygnału schodkowego nie jest trudne, faktycznie ustalone wartości K p i T można łatwo określić na podstawie eksperymentalnej krzywej przejściowej (rys. 6). Skośna sekcja OA na krzywej jest wyjaśniona faktem, że przemysłowy regulator PI ma serwo z końcową (ograniczoną) prędkością ruchu wałka wyjściowego skrzyni biegów. Z tego wykresu wynika to
K p = x p1 / y * (3.7)
oraz T i numerycznie równy czasowi potrzebnemu do przesunięcia wałka wyjściowego serwomotoru od położenia x p1 do jego podwójnej wartości 2x p1. Stąd druga nazwa to T i jest podwojeniem czasu sygnału wyjściowego regulatora PI x p, gdy sygnał kroku y * jest podawany na jego wejście.
Z równania dynamiki idealnego regulatora PI wynika, że K p / T określa stopień wejścia składnika całkowego w prawo kontroli PI
Rzeczywiście, z nieograniczonym wzrostem T, drugi termin w
 ostatnie równanie ma tendencję do zera, a regulator od całki proporcjonalnej przechodzi do regulatora P. W takim przypadku wykładnik (w postaci de - t / T u) na wyjściu rzeczywistego łącznika różnicującego wykorzystywanego jako urządzenie sprzężenia zwrotnego degeneruje się do sygnału schodkowego d (rys. 5).
ostatnie równanie ma tendencję do zera, a regulator od całki proporcjonalnej przechodzi do regulatora P. W takim przypadku wykładnik (w postaci de - t / T u) na wyjściu rzeczywistego łącznika różnicującego wykorzystywanego jako urządzenie sprzężenia zwrotnego degeneruje się do sygnału schodkowego d (rys. 5). 4. Kontroler PID
Prawo regulacji
W p (p) = K p + K p / T i P + K d T dP (4.1)
w prawdziwych regulatorach jest on tworzony przez szeregowe (Rys. 7, a) lub równoległe (Rys. 7, b) poprawki regulatora PI z wykorzystaniem rzeczywistego rozróżniania (RD). W obu przypadkach prawo PID jest powielane tylko w przybliżeniu.
Z kolejną poprawką
Na rys. 8. Przedstawiono krzywą przyspieszenia rzeczywistego regulatora PID z wyjściem analogowym (linia ciągła). W przeciwieństwie do ideału (linia przerywana) ma ograniczony i płynnie tłumiony "skok" x * p, związany z różnicowaniem sygnału schodkowego za pomocą łącza RD.
Wniosek
Automatyczne regulatory, oprócz wysokiej niezawodności, powinny cechować się wysoką czułością na zmiany sygnału wejściowego, niezbędne do dokładnego utrzymywania kontrolowanych wartości w pobliżu ustawionej wartości. W tym celu w ramach regulatora dostarczane jest specjalne urządzenie pomiarowe. Ponadto automatyczny regulator musi generować na wyjściu siłę potrzebną do poruszania organów regulacyjnych (zawory, zasuwy, zasuwy), tj. Zawierać w swej strukturze wystarczająco mocny siłownik (serwo).
Aby wdrożyć wybrane prawo regulacji i zmienić ustawienia regulatora w ramach wymaganych limitów, powinien on obejmować urządzenia do tworzenia prawa regulacji i zmiany (korekty) ustawień. Konieczne jest również posiadanie możliwości zmiany w szerokim zakresie określonej wartości regulowanej ilości, z którą porównywana jest jej aktualna wartość. To wymaganie zapewnia ręczne lub automatyczne sterowanie (ładowarka) w regulatorze. Spełnienie wymienionych wymagań jest możliwe tylko przy użyciu automatycznych regulatorów pośredniego działania.
Referencje
Pletnev G.P. Automatyczna kontrola i ochrona elektrowni cieplnych elektrowni: podręcznik dla szkół technicznych. - 3 ed., Pererab. - M.: Energoatomizdat, 1986.
Besekersky V.A., Popov E.P. Teoria systemów automatyczne sterowanie. Wydawnictwo "Science", 1966.
Mikhailov V.S. Teoria zarządzania. - K.: Wyższa. wk Head Wydawnictwo, 1988.
Zaitsev G.F. Teoria automatycznej kontroli i regulacji. - 2nd ed., Pererab. I dodaj. - K.: Wyższa. wk Wydawnictwo główne, 1989.
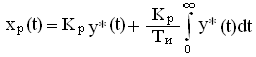
1.5. Regulatorzy i przepisy prawne.
Regulator jest wywoływany w pełni funkcjonalny, strukturalnie zaprojektowany jako osobna jednostka, fizyczny urządzenie. To urządzenie ma wejście do odbierania sygnału z czujnika kontrolowanej ilości obiektu kontrolnego, wyjście do dostarczania sygnału sterującego do urządzenia uruchamiającego automatyczny system sterowania, zdalne sterowanie do ustawiania wymaganego zachowania automatycznego systemu sterowania przez człowieka, lub system komunikacji z komputerem sterującym proces technologiczny. Wreszcie, taki kontroler fizyczny ma urządzenie, które generuje sygnał sterujący na podstawie odniesienia, bieżącej wartości kontrolowanej zmiennej, i, m. zakłócenia i z góry określony algorytm przetwarzania tych sygnałów. Wiele regulatorów technicznych wdraża się na bazie mikrokontrolerów. Ponadto zdarza się, że mechanizm wykonawczy (MI) i regulator (RO) są uwzględnione w składzie regulatora technicznego. Taki regulator wystarczy, aby połączyć się z obiektem kontrolnym, aby uzyskać SAR.Ryc. 1,25. Automatyczny regulator Napięcie APC Line-R 600 VA. Modułowy system elementów LOVATO Electric
W TAU regulator nazywa się strukturalną jednostką algorytmicznąznajduje się na schemacie funkcjonalno-strukturalnym kryształu górskiego za urządzeniem, porównując zadanie i kontrolowaną zmienną (sumator) (ryc.1.26). Ta jednostka przekształca, zgodnie z danym algorytmem, sygnał błędu w sygnał dostarczany do modelu siłownika (MI), aby sterować tym ostatnim.

Ryc. 1.26. Regulator ATS z kontrolą przez odchylenie w TAU jest częścią regulatora technicznego. w technice regulator jest fizyczną jednostką funkcjonalną, aw TAU w ACS z kontrolą opartą na odchyleniu, regulator jest algorytmem do przekształcania sygnału błędu w sygnał sterujący. W SAR z połączoną kontrolą odchyleń i zakłóceń sterownik implementuje algorytm do przekształcania sygnałów błędu i zakłóceń w sygnał sterujący. Przepisy prawne są to matematyczne algorytmy, zgodnie z którymi w SAR z kontrolą przez odchylenie, sygnał błędu śledzenia (odchylenie) jest przekształcany na sygnał sterujący dostarczany do siłownika SAR lub bezpośrednio do obiektu kontrolnego, jeśli MI i RO są uwzględnione w modelu tego ostatniego. Przepisy prawne zezwalają SAR na rozwiązywanie przypisanych jej zadań: na śledzenie i stabilizację z wymaganą jakością. Najczęściej stosowane w praktyce regulatory, które wdrażają P-, PI- i Prawa PID rozporządzenie (proporcjonalny, proporcjonalny-całkowy i proporcjonalno-całkowy-różnicowy). P - regulator - jest regulatorem, który stosuje najprostsze proporcjonalne prawo regulacji. Funkcjonalnie jest to wzmacniacz bezwładnościowy, a strukturalnie algorytmicznie jest to połączenie proporcjonalne (rys. 1.27). P - regulator po prostu kilkakrotnie wzmacnia sygnał błędu. Znaczenie regulatora P zależy od tego, że w statycznym współczynniku SAR, gdy jest on używany, zmiana jego wzmocnienia może nie tylko osiągnąć stabilność SAR, ale również zoptymalizować wartość tego współczynnika i zoptymalizować jakość całego SAR. Jednak nie zawsze jest możliwe uzyskanie wymaganych lub tylko dobrych wskaźników jakości SAR za pomocą samego regulatora P.

Ryc. 1.27. П - regulator, jego transfer i funkcje przejściowe
PI - regulator. Wyjście regulatora PI jest proporcjonalne do ważonej sumy sygnału wejściowego i całki z niego (patrz rys. 1.28). Zgodnie z tym algorytmem konstruowany jest tak zwany równoległy model regulatora PI. Często używany i alternatywny model równoważny, który jest połączenie szeregowe integrator i łącze zwiększające (patrz rys. 1.28). PI - regulator ma dwie ważne zalety. Po pierwsze, wprowadzenie go do statycznego ATS zamiast do kontrolera P sprawia, że ATS jest statyczny, co poprawia jakość regulacji w stanie ustalonym. Po drugie, kontroler PI pozwala, za pomocą elementu wymuszającego zawartego w jego składzie, zrekompensować w znacznym stopniu na wysokich częstotliwościach bezwładność wprowadzoną przez integrator i zachować jakość przejściowego trybu pierwotnego SAR statycznego, w szczególności jego prędkość. Tak więc PI - regulator za pomocą prostych środków jednocześnie poprawia jakość ustalonego trybu działania początkowej statycznej WPR i utrzymuje jakość przejścia, co jest powodem powszechnego stosowania takich regulatorów.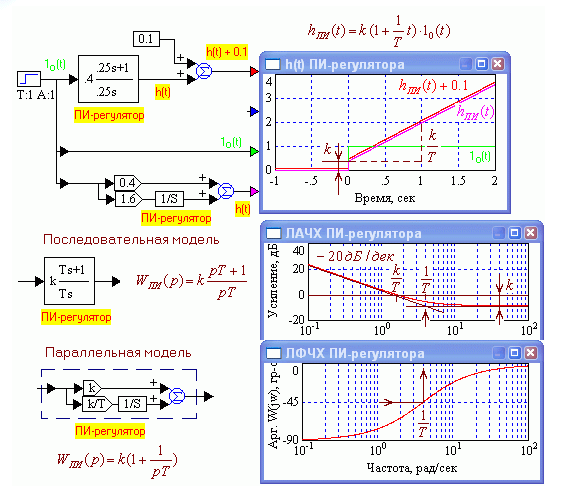
Ryc. 1.28. PI - regulator, jego funkcje przenoszenia i przejścia oraz charakterystyki częstotliwościowe
Jak widać na rys. 1,28, na niskie częstotliwości Sterownik PI zachowuje się jak integrator, a przy wysokiej - jak proporcjonalny ogniwo. Tak więc, jeżeli regulator PI jest ustawiony prawidłowo, właściwości automatycznego układu sterowania w stanie ustalonym są poprawione, a właściwości trybu przejściowego są zachowane, tj. Prędkość i dokładność regulatora PI nie tylko wzmacnia sygnał błędu, jak robi to sterownik P, ale także z powodu obecności integratora, który gromadzi się z upływem czasu. Pozwala to automatycznemu systemowi sterowania z regulatorem PI pracować w stanie ustalonym podczas śledzenia stałych zadań z błędem zerowym (Innymi słowy, automatyczny układ sterowania z regulatorem PI jest statyczny. Kontroler PIDWyjście regulatora PID jest proporcjonalne do ważonej sumy sygnału wejściowego, jego całki i pochodnej (patrz rys. 1.29). Zgodnie z tym algorytmem konstruowany jest tak zwany równoległy model regulatora PI. Często używany i równoważny model alternatywny, który jest połączeniem szeregowym integratora i dwóch jednostek wymuszających (patrz rys. 1.29). Nazwijmy takie modele idealnymi. Uwaga. Jeśli uznamy, że kontroler PID jest algorytmem matematycznym do przetwarzania sygnału, który do niego dociera, wówczas można go oczywiście wdrożyć jako procedurę obliczeniową. Ale jeśli trzeba zbudować prawdziwe urządzenie o takich cechach dynamicznych, okaże się, że jego dokładna implementacja nie jest możliwa, ponieważ realizacja liniowego obiektu dynamicznego wymaga, aby stopień jego charakterystycznego wielomianu (mianownika funkcji przenoszenia) był nie mniejszy niż licznik funkcji przenoszenia. Dlatego Vissim nie pozwala na budowanie idealnego sekwencyjnego modelu kontrolera PID tylko przy pomocy bloku transferFunction (Funkcja Transferu). Jeśli jednak w programie Vissim wymagane jest zastosowanie możliwego do zastosowania modelu sekwencyjnego, to mianownik funkcji przenoszenia może zostać uzupełniony o mnożnik w postaci wielomianu pierwszego stopnia o stosunkowo małej stałej czasowej znacznie mniejszej niż stałe czasowe regulatora PID, a najlepiej mniej niż co najmniej niż najniższa stała czasowa niezmiennej części SAR.
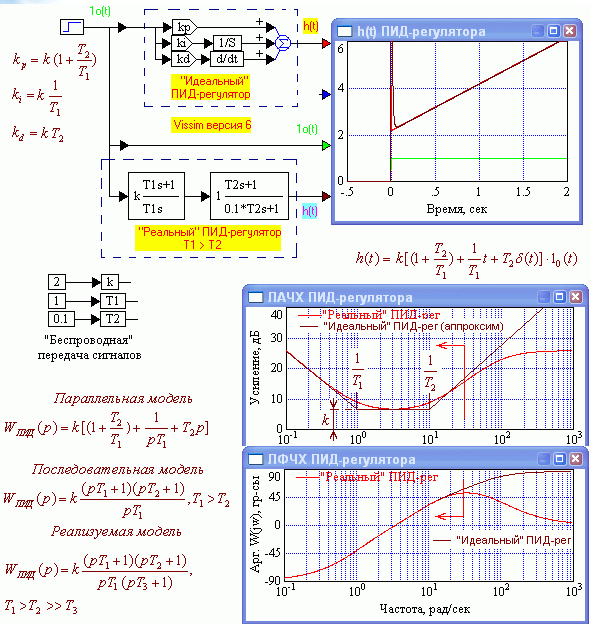
Ryc. 1,29. Trzy modyfikacje regulatora PID
"Rzeczywisty" regulator PID spełnia swoje funkcje tylko z sygnałami, których widmo jest ograniczone powyżej, tj. dla dość powolnych sygnałów (czerwone strzałki). Ten zakres można rozszerzyć do pożądanej wartości, zmniejszając pomocniczą stałą czasową T3. Regulator PID podnosi wzmocnienie zarówno przy niskich, jak i wysokich częstotliwościach. Jest bardziej energiczny, niż regulator PI reaguje na szybkie zmiany sygnałów wejściowych, co widać na funkcji przejścia. W rezultacie poprawia się działanie SAR, a także jakość jego trybu stabilnego i przejściowego.
1.6. Metody optymalizacji ATS.
Matematycznie optymalizacja ATS jest zredukowana do minimalizacji funkcji kosztowej poprzez określenie (na przykład przez wybór) najlepszych wartości i kombinacji parametrów charakteryzujących ATS. Opracowano szereg analitycznych metod optymalizacji, algorytmów ograniczonych do określania wartości parametrów, przy których funkcja kosztu staje się minimalna. Na przykład w programie Vissim można wybrać Powell, Fletcher-Reeves, Polak-Ribeira i inne. Podstawowa idea algorytmicznych metod optymalizacji polega po pierwsze na tak małej zmianie wstępnie ustawionych przybliżonych wartości parametrów, w których funkcja ceny jest płynnie i spójnie zmniejsza się, aż osiągnie minimum (metoda najkrótszego zejścia). Możesz więc określić minimum najbliższe początkowych wartości parametrów. Ale ta minimalna cena, w zależności od wyboru początkowych wartości parametrów, może nie być najmniejsza, globalna, ale lokalna. Po drugie, jeśli nie tylko nie jest znana przybliżona wartość parametrów zbliżona do minimalnej ceny, ale nawet nie wiadomo, czy w ogóle istnieje minimum, to trzeba uporządkować wartości parametrów w bardzo szerokich zakresach, a następnie wyjaśnić lokalizację funkcji ceny minimalnej. Taki algorytm w przypadku kilku minimów funkcji ceny może losowo doprowadzić do dowolnego z nich. Zdarza się, że przy rozwiązywaniu problemów optymalizacyjnych badacz nie zna liczby lokalnych minimów lub wystarczająco blisko pożądanych minimalnych wartości parametrów. Aby rozwiązać problem poprawnie, należy zastosować metodę prób i błędów, ustawić różne początkowe wartości parametrów, określić minimum funkcji ceny i porównać uzyskane wyniki ze sobą oraz z wymaganiami zadania projektowego ATS. Spośród metod optymalizacji, przybliżoną metodę rozważa się poniżej, w oparciu o uzyskanie początkowych wartości parametrów strojenia regulatorów przez analizę LAFC otwartego obwodu SAR, a następnie udoskonalenie tych wartości metodą prób i błędów, jak również automatyczne metody optymalizacji w programach symulacyjnych, w szczególności Vissim. Definicja i eksperymentalne udoskonalenie parametrów strojenia regulatorów ATS.Ogólny pomysł zaproponowanej poniżej metody optymalizacji parametrycznej opiera się na wstępnym określeniu przybliżonych wartości parametrów strojenia regulatorów przez LAFC niezmienionej części ATS, a następnie poprawieniu ich wartości metodą prób i błędów (patrz rys. 1.23). Dzięki tej metodzie optymalizacji, bez względu na to, czy będzie ona wykonywana przez komputer, czy też w sposób eksperymentalny i ręczny, ważne jest, aby zmniejszyć pracę, aby wybrać początkowe wartości parametrów jak najbliżej ich optymalnych wartości, jeśli takie istnieją. 1. Ustawienie P - regulator.Przybliżone określanie wzmocnienia regulatora P dla statycznego współczynnika SAR wstępna korekta. Pierwszym krokiem korekty jest sprawdzenie stateczności i, w razie potrzeby, stabilizacja obwodu otwartego SAR, z uzyskaniem marginesu jego stabilności w amplitudzie 12 - 20 dB. Uwaga. Jeśli otwarta pętla składa się ze stabilnych łączy (typowe połączenia do drugiego rzędu włącznie), które z reguły występują, przyczyną niestabilności jest obecność wewnętrznych obwodów. Kontury te można ustabilizować w programach modelujących, zmniejszając wzmocnienie tych pętli o 4-10 razy, po uprzednim usunięciu ich do granic stabilności poprzez zmniejszenie wzmocnienia pętli. Fakt, że ACS jest doprowadzany do granicy stabilności, jest ustalany przez formę funkcji przejściowej, która na granicy stabilności zawiera element oscylacyjny, którego amplituda powoli wzrasta z czasem przez wiele okresów tych oscylacji. Wstępna korekta polega na tym, że najpierw zmieniając wzmocnienie konturu pierwotnego współczynnika SAR (tak zwaną niezmienioną część SAR, patrz na przykład, rys. 2.1 lub 2.3) najpierw, zapasy stabilności
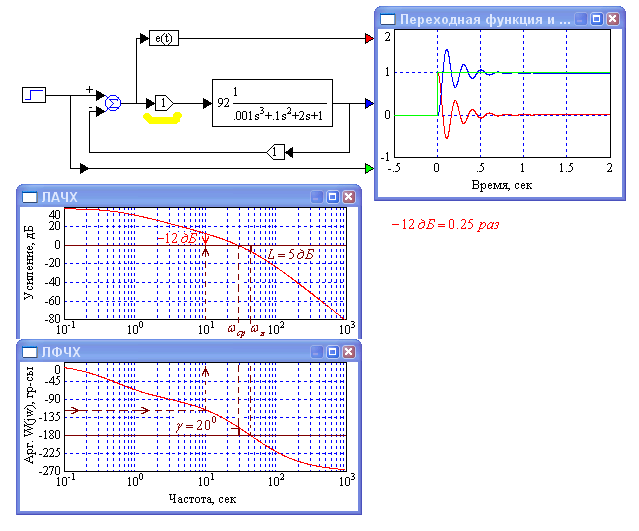

Ryc. 1.30. Funkcje przejścia zamkniętego SAR, LAFC i LFCH dla ich otwartych obwodów
Uwaga. Możliwa była matematyczne wyrażenie przekroczenia zamkniętego SAR w zależności od wzmocnienia i znalezienie minimum tej funkcji. Jednak obliczenia matematyczne okazują się zbyt kłopotliwe, jeśli chodzi o inżynierskie rozwiązanie problemu, dlatego eksperymentalna metoda kolejnych przybliżeń w programie symulacyjnym jest dziś łatwiejsza i dlatego jest lepsza. 2. Ustawianie kontrolera PI.Jeśli, podczas optymalizacji przyrostu statycznego współczynnika SAR, omówionego w poprzednim paragrafie, nie jest możliwe uzyskanie SAR ze wskaźnikami dobrej jakości (SAR ma duże błędy w stanie ustalonym ze względu na niewielką wzmocnienie pętli przy niższych częstotliwościach), wtedy struktura regulatora musi zostać zmieniona, zastępując regulator P przez PI -regulator Ponieważ automatyczny układ sterowania z regulatorem PI jest astatyczny, dla jego wstępnej korekcji wystarczy zapewnić dokładnie taką samą stabilność jak poprzednio, stabilność fazy 45 45-70 0, korzystnie 60 0, 12-20 dB w amplitudzie (4-10 razy ), lepiej niż 18 dB, zmieniając wzmocnienie pętli. Ponieważ kontroler PI zawiera integrator, ATS z nim jest koniecznie astatyczny. Dlatego nie ma wymogu wielkości wzmocnienia pętli z punktu widzenia zapewnienia jakości operacji ATS w statyce, w przeciwieństwie do statycznego ATS. Zapewnienie wymaganych zapasów stabilności może odbywać się w różnych sekwencjach, ale najlepiej jest to zrobić w następujący sposób. 1. W początkowym statycznym współczynniku SAR, zmieniając wzmocnienie regulatora P, aby zapewnić margines stabilności fazy równy 60-70-0 lub więcej zgodnie z rys. 2.9, a margines stabilności w amplitudzie jest nie mniejszy niż 12 dB. 2. Dla LAFC obwodu otwartego just adjustated ATS, określ optymalną wartość stałej czasowej T Sterownik PI (rys.1.31). Pożądana stała czasowa jest odwrotnie proporcjonalna do częstotliwości parowania segmentów aproksymacyjnych SAR o nachyleniach 0 i - 20 dB / dek. W tym przykładzie T = 1 / 0,5 = 2,0 sekundy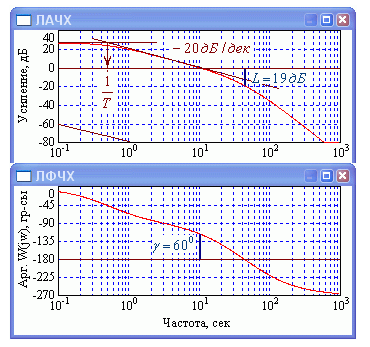
Ryc. 1.31. Wyznaczanie stałej czasowej regulatora PI za pomocą otwartej pętli LAFC
3. Początkowa wartość wzmocnienia regulatora PI jest ustawiona na wartość k = 0,5. W rezultacie, biorąc pod uwagę wzmocnienie regulatora P (kp = 0,25), funkcja przenoszenia regulatora PI i obwodu SAR przyjmuje postać pokazaną na rys. 1.3.
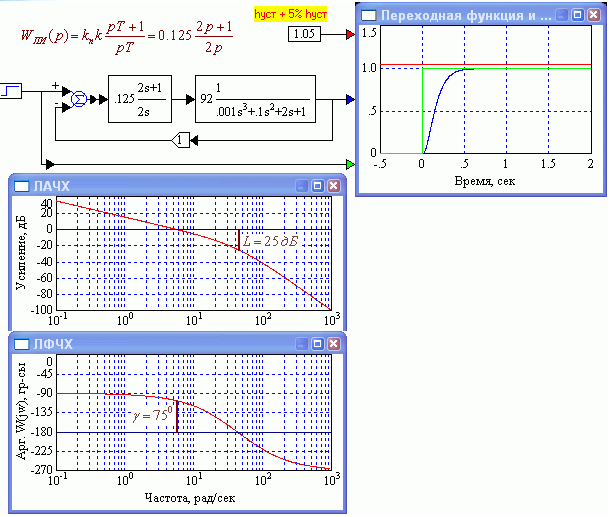
Ryc. 1.32. Przybliżone strojenie regulatora PI
Jak można zauważyć, reakcja przejściowa jest zadowalająca, a rezerwy stabilności są nieco zawyżone, więc przeregulowanie wynosi zero. Wstępne przybliżenie jest całkiem zadowalające, ale szybkość SAR może zostać nieco poprawiona. Optymalizacja wartości wzmocnienia PI. W ogólnym przypadku dla regulatora PI optymalizację należy przeprowadzić zgodnie z obydwoma jego parametrami: wzmocnienie ki stała czasowa T. Ciężka praca jest ręczna. Dlatego też można ograniczyć się tylko do optymalizacji wzmocnienia, przyjmując, że stała czasowa T określona z zadowalającą dokładnością. Pozostaje metodą prób i błędów, zmieniając wzmocnienie regulatora PI, tak aby uzyskać 5% lub nieco mniejsze przekroczenie σ. Na rys. 1.33 pokazuje zoptymalizowany model ATS z kontrolerem PI. Przerost wynosi 5%. Zapewnia to minimalny czas regulacji dla tych obiektów, które nie są odpowiednie do nadmiernych drgań, którym towarzyszą naprzemienne obciążenia dynamiczne.
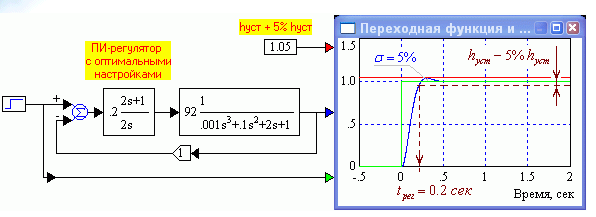
Ryc. 1,33. Zoptymalizowany model ATS ze sterownikiem PI.
3. Ustawianie kontrolera PID.Używanie regulatora PID pozwala na zwiększenie prędkości SAR w trybach przejściowym i stanu ustalonego w porównaniu do SAR z tą samą niezmienioną częścią, która korzysta z kontrolera PI. Przybliżone określenie parametrów strojenia regulatora PID.Ponieważ SAR ze sterownikiem PID jest "astatyczny", dla jego wstępnej korekcji wystarczy upewnić się, że, jak poprzednio, dla kontrolera PI, rezerwy stabilności
Ryc. 1.34. Stałe czasowe PID
Po ustaleniu stałych czasowych regulatora PID należy przyjąć współczynnik wzmocnienia k = 0,5 (wartość jest empirycznie uzyskana), obliczyć i ustawić współczynniki wzmocnienia gałęzi regulatora i skonstruować odpowiedź przejściową otrzymanego SAR (ryc. 1.3.5). Czas regulacji wynosi 0,09 sekundy, przeregulowanie wynosi zero. Jak widać, jakość ATS jest już całkiem dobra. W dolnej części ryciny 13.3 pokazano skład bloku zróżnicowania zmontowanego w programie Vissim
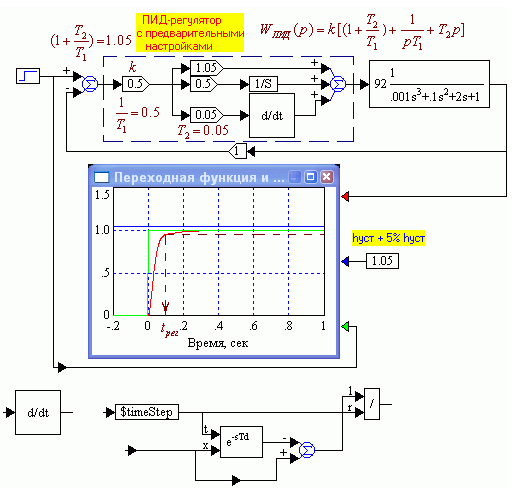
Ryc. 1.35. ATS ze wstępnie ustawionymi parametrami regulatora PID.
Optymalizacja wartości wzmocnienia regulatora PID.Ponieważ wstępnie skorygowany SAR (ryc. 1.35) nie ma przekroczenia, wskazuje to na potencjalny wzrost jego prędkości bez zauważalnego pogorszenia wartości maksymalnych błędów trybu przejściowego. Aby to zrobić, metodą prób i błędów, zmieniając wzmocnienie regulatora, osiągamy przekroczenie równe 5%. Ryc. 1.36 pokazano ACS z optymalną regulacją ręcznego wzmocnienia PID. Optymalna wartość ręcznie ustawiona metodą prób i błędów to k = 0,85. Czas regulacji zoptymalizowanego ATS wynosi 0,04 s, czyli dwa razy szybciej niż ATS na rys. 1.35.
Ryc. 1.36. ATS z optymalną regulacją wzmocnienia PID.
4. Porównanie skuteczności regulatorów.Rozważ funkcje przejścia SAR, mające takie same niezmienione części i optymalne ustawienia kontrolerów P, PI i PID, uzyskane za pomocą LAFC i metody prób i błędów (ryc. 1.37).
Ryc.1.37. Porównanie ATS z optymalnymi ustawieniami kontrolerów P, PI i PID
Jak widać, optymalny regulator PI daje SAR równy prędkości do SAR z P-kontrolerem, ale przekracza swój zerowy błąd śledzenia w statyce (podczas śledzenia stałej wartości). Kontroler PID w tym przypadku daje SAR dużo, pięć razy lepiej niż pozostałe dwie prędkości, chociaż oscylacja takiego SAR przejawia się w większym stopniu. To jednak, jeśli to konieczne, łatwo skorygować niewielkie zmniejszenie wzmocnienia. Błąd stanu ustalonego SAR dla regulatora PID, podobnie jak SAR dla regulatora PI, jest oczywiście zerowy. Tak więc regulator PI pozwala SAR kontrolować obiekt "bardziej miękki", a regulator PID - energiczniej. Oba dają zerowy błąd śledzenia w statystykach, w przeciwieństwie do małego, ale nie zerowego błędu SAR z kontrolerem P. Wyjaśnienie. Czas regulacji optymalnego SAR określa częstotliwość odcięcia LAFC: t reg = (1 - 5) / ω cf. Przy optymalnym ustawieniu regulatora częstotliwość ω 20-40 sprzężenia segmentów liniowych przybliżenia LAFC ze zboczami -20 i -40 dB / dec jest bliska częstotliwości odcięcia ω cf i nieco, o około oktawę, przekracza. W związku z tym czas regulacji SAR jest pośrednio określony przez tę częstotliwość sprzężenia. Częstotliwość ω 20-40, w przypadku optymalnego dostrojenia regulatorów P i PI, jest równa lub zbliżona do odwrotności drugiego największego stałego czasu niezmienionej części ATS. W przypadku opt. Ustawienia regulatora PID, częstotliwość ω 20-40 jest podobnie określana przez trzecią największą stałą czasową niezmienionej części, ponieważ regulator PID kompensuje dwie wyższe bezwładności z jej czynnikami przyspieszającymi. Dlatego czas regulacji zoptymalizowanych wartości SAR dla regulatorów P i PI jest w przybliżeniu taki sam, a przy regulatorze PID może być znacznie mniej, jeśli trzecia co do wielkości stała czasowa jest znacznie mniejsza niż druga. Ta pozycja jest pokazana na ryc. 1.38. Szybkość SAR z regulatorami P i PI jest taka sama i jest określana przez drugą co do wielkości stałą czasową niezmienionej części SAR (t reg = 1 / ω av PI = 2 / ω 20-40 PI = 2 · T 2), a prędkość SAR z PID regulator jest wyższy i jest określany przez trzecią co do wielkości stałą czasową niezmienionej części ATS (t reg = 1 / ω srpid = 2 / ω 20-40 PID = 2 · T 3). To samo można zilustrować analitycznie (ryc. 1.39). Mnożnik wymuszający regulatora PI kompensuje największą stałą czasową niezmienionej części układu sterowania automatycznego (obiektu kontrolnego), ale jednocześnie wprowadza bezwładność integratora o tej samej stałej czasowej. Dlatego czas trwania przejściowych ATS z regulatorami P i PI jest mniej więcej taki sam, ale ATS z regulatorem PI staje się astatyczny.
Ryc. 1.38 Zoptymalizowane pod względem LAF i LFCH ATS z regulatorami P-PI i PID.
Współczynniki doładowania optymalnego regulatora PID kompensują dwie największe bezwładności niezmienionej części SAR. W tym samym czasie sterownik PID wprowadza bezwładność integratora do obwodu ze stałą czasową równą największej stałej czasowej obiektu kontrolnego. W rezultacie czas trwania przejściowej wartości SAR dla regulatora PID jest znacznie krótszy niż SAR dla regulatorów P i PI, pod warunkiem, że stałe czasowe obiektu kontrolnego są znacząco różne.

Ryc. 1.39. Charakterystyka przejściowego współczynnika SAR z regulatorem PID
Opiszmy przejściową charakterystykę SAR uzyskanego powyżej i przejściową charakterystykę jego niezmiennej części. Można to zobaczyć na ryc. 1.40, że prędkość SAR jest około dwa razy lepsza niż czas przyspieszania obiektu kontrolnego. Jest to wyjaśnione przez dużą różnicę pomiędzy główną i następną stałą czasową niezmienionej części, obecnością pętli sterowania i współczynnikami doładowania w regulatorze PID.


Ryc.1.40. Przejściowe funkcje obiektu kontrolnego i SAR
Należy zauważyć, że modele strukturalne liniowych SAR rozpatrywanych w TAU, w szczególności te rozważane powyżej, z reguły nie biorą wyraźnie pod uwagę prawo zachowania energii. Oczywiście modele zakładają, że są zachowane, ale skąd pochodzą i jak są przekształcane, ile mocy jest potrzebnych do sterowania obiektem nie jest brane pod uwagę i nie jest opisane wprost. Na przykład, działanie łącza wzmacniającego (proporcjonalnego) wymaga dostarczenia energii z zewnątrz, ale z reguły nie jest to pokazane na schematach strukturalnych. Ponadto systemy liniowe z definicji nie opisują takich zjawisk, jak ograniczenie mocy zużywanej i generowanej przez elementy SAR, w szczególności obiekty kontrolne. Dlatego modele rozważane powyżej w równym stopniu opisują reakcję zlinearyzowanego modelu SAR zarówno na względnie mały przyrost zadania, odpowiadający pojedynczemu skokowi na jego wejściu, jak i ogromną zmianę. Jest to cecha, godność i ograniczenia modeli liniowych układów sterowania. Uwaga. Jeśli to konieczne, możesz zbudować model, który wyraźnie bierze pod uwagę moc wymaganą do sterowania. Ale taki model będzie musiał wziąć pod uwagę ograniczenie pojemności generowanych i zużywanych w elementach ATS, a zatem będzie on nieliniowy, co wyprowadzi nas z klasy systemów liniowych rozważanych w tym dokumencie. Rozważ fizyczną naturę obiektu kontrolnego (niezmienna część SAR). Załóżmy, że podstawą niezmiennych części SAR jest bezwładnościowy obiekt sterujący, na przykład silnik prąd stałyprowadzenie samochodu. Zgodnie z charakterystyką przyspieszenia z rys. 1.40, że czas przyspieszania wynosi około 6 sekund (trzy razy więcej niż główna stała czasowa, 2 sekundy, patrz mianownik funkcji transferu na rysunku 1.40). Ale jak widać na rys. 1.40 zsyntetyzowany ATS spowoduje, że silnik przyspieszy od zera do częstotliwość znamionowa, w zależności od rodzaju regulatora w ciągu 0,2 sekundy, a nawet w 0,04 sekundy, tj. około 100 razy szybciej! Formalnie można sobie wyobrazić taką sytuację, z zasilaniem silnika, wielokrotnie większą niż jego pojemność nominalna, ale w praktyce z pewnością doprowadzi to do przeciążenia i awarii zarówno układu zasilania, jak i samego silnika. Jednocześnie, jeśli pojedynczy krok na wejściu SAR odpowiada przyspieszeniu silnika o małą wartość, na przykład o 1 rad / s, z częstotliwości 500 rad / s do 501 rad / s, wówczas taki niewielki wzrost może wymagać wcale nie ekstremalnego zwiększenia mocy na silniku. W takim przypadku SAR jest w stanie zareagować sto razy szybciej. Tak więc konieczne jest rozróżnienie czas przyspieszania obiekt, gdy jego kontrolowana ilość ma się zmienić z zera na nominalną i czas regulacji ATS, jeśli chodzi o względnie małe przyrosty kapitana, a zatem kontrolowane ilości, które nie wymagają sumowania się do obiektu o ekstremalnych wartościach mocy. Oszacowanie czasu regulacji podczas analizy ATS i sugeruje obecność stosunkowo niewielkich zmian w zadaniu. Zauważ, że obiekt sterujący działa w łańcuchu technologicznym. Jednocześnie, włączanie i wyłączanie, a zatem zatrzymywanie i przetaktowywanie, odbywa się stosunkowo rzadko, podczas gdy stabilizacja i śledzenie są przeprowadzane przez większość czasu. Stąd znaczenie oceny i minimalizacji czas regulacjipodczas którego błąd śledzenia i stabilizacji może przekroczyć dopuszczalny poziom, obniżając jakość produktów. Tak więc, po teoretycznej syntezie modelu SAR, a jeszcze lepiej, przed tym konieczne jest zdefiniowanie i ustalenie ograniczeń działań kontrolnych w nim. Doprowadzi to do tego, że czas przyspieszania od zera do wartości nominalnej kontrolowanej wartości zostanie określony przez obiekt kontrolny, równy lub nieco mniejszy, a odpowiedź WPR na małe zmiany wartości odniesienia będzie znacznie większa. Jednakże, jeśli moc zmiennych sterujących nie jest ograniczona, wyniki z ryc. 2.16 można uznać za całkiem poprawny, ponieważ dowolne wartości zadania przeskakują od zera do wartości nominalnej: czas przyspieszania SAR może być taki sam, jak czas regulacji. Może to być na przykład w fotoelektrycznych systemach śledzenia mocy małej mocy, systemach PLL, obwody elektryczne itp., gdzie moc tych sygnałów jest niska.
Kontroler PI jest jednym z najbardziej wszechstronnych regulatorów. W rzeczywistości regulator PI ma dodatkowy integralny komponent. Komponent, który stanowi uzupełnienie algorytmu, jest przede wszystkim potrzebny do wyeliminowania błędu statycznego, który jest charakterystyczny dla regulatora proporcjonalnego. W rzeczywistości integralna część jest kumulatywna, a zatem pozwala kontrolerowi PI uwzględnić w danym czasie historię zmian w ilości wejściowej. Jeśli dodasz komponent różnicowy do algorytmu, przekształci się w.
Regulator PI. Formuła sygnału wyjściowego:
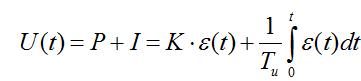
Regulator PI. Funkcja transferu:
W (p) = K (1 + 1 / Ti i * s) lub W (p) = K + 1 / Ti i * s;
Na podstawie wzoru można zauważyć, że składnik p dodaje się do nagromadzonego składnika w czasie t. W rzeczywistości kontroler PI "uczy się" z wcześniejszych doświadczeń. Jeśli w systemie nie występują zakłócenia zewnętrzne, wartość regulowana jest ustabilizowana w określonej wartości: składowa P będzie równa 0, a integralny komponent w pełni zapewni sygnał wyjściowy.
Sterownik PI można uzyskać - równolegle. Zróbmy w MatLab schemat dwóch połączonych równolegle ogniw - k i 1 / Ti. Dajemy 1 sekundę opóźnienia, aby zobaczyć wynik w początkowym momencie.
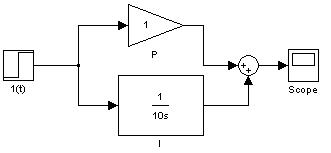
Zastanów się nad regulatorem PI. Odpowiedź przejściowa - reakcja na pojedyncze zaburzenie kroku. Let's modelować w środowisku MatLab kilka transjentów dla różnych sytuacji.
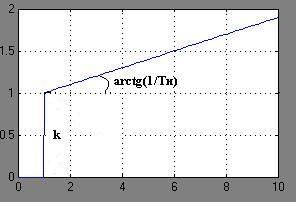
Z wykresu jasno wynika, że odpowiedź przejściowa regulatora PI składa się ze składanej proporcjonalnej i całkowej. Im większy k, tym większy będzie proporcjonalny rzut na wykresie.
Rozważmy przykład kilku Ti na regulatorze PI, jego wydajność i rodzaj procesu przejścia. Symulujemy kilka równoległych procesów z wyjściem do jednego zakresu za pomocą Mux.